This is the second in a series of articles that is dedicated to defining a new area for the underwater search of MH370. In the previous article, we presented Bobby Ulich’s overview of a new statistical criteria that supplements the criteria that many investigators have used in the past for evaluating candidate flight paths. In the present article, we present an overview of an exhaustive study principally undertaken by Richard Godfrey, with contributions by Bobby Ulich and me, to examine flight paths with the assumption that after 19:41, the flight was automated and with no pilot inputs. The results indicate that a flight crossing the 7th arc near 34.4S latitude merits a deeper investigation, which will be the subject of the next (third) paper.
What follows are excerpts from “Blowin’ in the Wind”, by Richard Godfrey et al. For more details, please consult the full paper.
Introduction
Following on from Richard Godfrey’s earlier paper entitled “How to play Russian Roulette and Win” published on 13th February 2019, which covered the first part of the flight and diversion of MH370 into the Straits of Malacca, Richard was contacted by Bobby Ulich, who asked the question “where do we go from here?” Richard Godfrey, Bobby Ulich and Victor Iannello came up with the idea to scan the Southern Indian Ocean (SIO) for possible flight paths of MH370 using a degree of precision that we believe has not been previously applied, and to use certain statistical checks on the presence or absence of correlations in the data. Each of us had independently developed a MH370 flight model using the Boeing 777-200ER aircraft performance data, Rolls Royce Trent 892 fuel range and endurance data, Inmarsat satellite data and the GDAS weather data. The goal was to find all possible MH370 flight routes that fit the data within appropriate tolerances. Additionally, the data would be checked using a set of correlations.
Method
Our assumptions about the automated flight after 19:41 are that there are 7 parameters that determine a possible MH370 flight path:
- Start Time
- Start Latitude
- Start Longitude
- Flight Level
- Lateral Navigation Method
- Initial Bearing
- Speed Control Mode
If you draw an arbitrary line of latitude between the area of the last known point and the SIO, MH370 must have crossed this line at a certain time, longitude, flight level and initial bearing using a particular lateral navigation method and speed control mode.
Having fixed the start latitude, the start time and start longitude can be varied for any given flight level, lateral navigation mode, initial bearing and speed control mode, and the fit to the aircraft performance data, satellite data and weather data ascertained. The flight model used in the wide area scan was developed by Richard Godfrey. First the altitude and air pressure at the selected flight level is determined. The GDAS weather data provides the actual surface air pressure and surface air temperature for a given position and time by interpolation. The air pressure for a given flight level is calculated based on the ISA standard surface pressure of 1013.25 hPa and standard surface temperature of 15.0°C. The geometric altitude for a given flight level is then approximated using the actual surface pressure and actual surface temperature. The altitude is used in the satellite data calculations, assuming the flight level is maintained between 19:41:03 UTC and 00:11:00 UTC. Similarly, the GDAS weather data is interpolated for the exact latitude, longitude and time to find the Outside Air Temperature (OAT) and wind at the given flight level.
The scan method for each Lateral Navigation Method (LNAV, CTT, CTH, CMT and CMH) and for each Speed Control Mode (Constant Mach and Long Range Cruise) requires stepping through each possible Initial Bearing (initially from 155°T to 195°T) in steps of 1°T. In Constant Mach (CM) the value was set initially at 0.85 and decremented in steps of 0.01 Mach.
[Note: LNAV = Lateral navigation (following waypoints connected by geodesics); CTT = Constant true track; CTH = Constant true heading; CMT = Constant magnetic track; CMH = Constant magnetic heading]
Once the Initial Bearing and (if relevant) the Mach has been set, the Start Time or Start Latitude is adjusted to minimise the RMS BTO Residual (BTOR) across the 5 satellite handshake points between 19:41:03 UTC and 00:11:00 UTC. The BTOR is the difference between the predicted BTO and the observed BTO. Then the Start Longitude is varied to minimise the RMS BTOR. Finally the Flight Level is adjusted in steps of 1 (standard altitude steps of 100 feet) to minimise the RMS BTOR. A full report is then produced for each scan. (The definition of GSE is found later in the paper, and the significance of the correlation coefficients is based on the work of Bobby Ulich and will be presented in a future paper.)
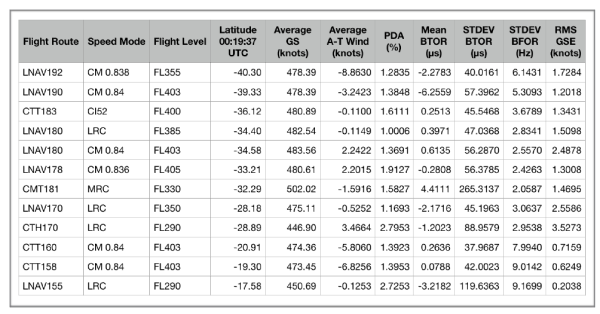
A number of MH370 candidate flight paths have been found over the years by various analysts resulting in Regions of Interest (ROIs) that have either already been searched or have been proposed for a further search. The table below lists some of the ROIs. The table includes some new ROIs which have been found as a result of the current systematic search. Some of the ROIs can be readily dismissed as the standard deviation BTO residual (<47 μs), standard deviation BFO residual (<4.3 Hz) or the calculated PDA (<1.5%) is too high.
Systematic initial bearings from 155°T to 195°T in steps of 1°T were analysed, plus some exotic cases in steps of 0.1°T. All navigation methods were covered: LNAV, CTT, CTH, CMT and CMH, all speed modes: Constant Mach 0.80 to 0.85, LRC 0.7047 to 0.8408, MRC, ECON CI52 and all flight levels: from FL290 to FL430. The fuel endurance was allowed to vary around 00:17:30 UTC and the resulting PDA was noted. The PDA was allowed to vary from the nominal 1.5% and the possibility that the bleed air was shut off for part or all of the time was considered.
In total 1,372 flight paths have been analysed, of which 828 flight paths since the start of this systematic study on 17th February 2019. Start latitudes from 16.0°N to 4.3°S have been covered and the start longitudes were unconstrained. Start times from 18:41:00 UTC to 19:32:00 UTC, but the final major turn had to be completed before the 2nd Arc at 19:41:03 UTC was reached.
Discussion
A more detailed analysis reveals 3 candidate ROIs for further investigation: ROI 1 – LNAV180 CM 0.84 FL403, ROI 2 – LNAV 170 LRC FL350 and ROI3 – CTH170 LRC FL290.
From a pilot’s point of view, a LNAV path on a bearing of 180°T would require setting a final waypoint as the South Pole. This flight path passes close to waypoint BEDAX. The overall fuel endurance and range fits and for a Main Engine Fuel Exhaustion (MEFE) at 00:17:30 UTC, a PDA of 1.37% is calculated (the nominal PDA is 1.5%). The RMS GSE is 2.49, which fits the expected range between 1.0 and 3.0 knots. This flight path ends at 00:19:37 UTC at around 34.5°S near the 7th Arc. This area was originally searched by Go Phoenix but all possible sightings were reexamined and discounted. The search area was widened in later search by Ocean Infinity, but again nothing was found.
An LNAV path on an initial bearing of 170°T starts close to Car Nicobar Airport (VOCX) and passes close to Cocos Island before ending at 00:19:37 UTC at around 28.9°S near the 7th Arc. The overall fuel endurance and range fits and for a MEFE at 00:17:30 UTC, with a calculated PDA of 1.17%. Notably, the Mean BFOR for this flight path is low at -6.87 Hz and is out of the expected range. The area around 28.9°S was searched by Ocean Infinity, but nothing was found.
The CTH path on an initial bearing of 170°T is unlikely as the fuel endurance and range does not fit well. The RMS BTOR is high at 79.6 μs and individual BTOR values are out of normal range. It is also unlikely that a pilot would switch to a True Heading mode. Normal operation is Magnetic Track and this mode is only used for short flight paths, such as during an approach or deviating to avoid bad weather. Switching from Magnetic to True compass mode is only normally done in the region of the north or south poles.

Conclusion
All possible MH370 end points of flight routes in any navigation mode and any speed mode have already been searched, within at least ± 25 NM of the 7th Arc (partially ± 40 NM). This means that MH370 has either been missed in a previous search or recovered from a steep descent of around 15,000 fpm and glided out to an end point outside the previously searched area.
There is only one Region of Interest, where we recommended a further analysis and search at around 34.4 °S near the 7th Arc, following a flight route from close to waypoint BEDAX using the LNAV lateral navigation mode with an ultimate waypoint of the South Pole on a track of 180°T due south, in Long Range Cruise speed mode and at a flight level between FL390 and FL403.
This Region of Interest will be analysed in more depth in the next paper in this series.
@All
Jeff Wise has published an article entitled “The Mystery Behind the Missing Malaysia Airlines Flight Isn’t Solved Yet” dated 28th June 2019.
https://onezero.medium.com/the-mystery-behind-the-missing-malaysia-airlines-flight-isnt-solved-yet-476f65d9b597
In my view, the article is an example of outrageous cheap journalism. There may be gaps in the MH370 story, but there are bigger gaps in the Jeff Wise fantasy.
I believe Blaine Gibson made genuine finds of MH370 debris, as did Johny Begue, Schalk Lückhoff, Neels Kruger, Liam Lotter, Milson Tovontsoa, Rija Ravolatra, Eodia Andriamahery, Jean Dominique, Suzy Vitry, Barry McQade, Jean Viljoen and others. 20 items of debris have been confirmed or are likely to have come from MH370. That these items of debris were flown intact to Kazakhstan, then subsequently damaged to simulate a crash, then subsequently exposed to marine life for a month and finally planted in 27 locations in 7 countries for 14 different people to find, is preposterous nonsense.
Blaine has travelled to 185 countries and speaks 6 languages fluently including Russian. This is not proof of anything suspicious. I have travelled to 130 countries and speak 4 languages fluently.
It is public knowledge that Blaine worked on various government sponsored projects between the US and Russia from 1998 until 2005. This included the US independent verification of the Russian reform of the Atomic Industries Enterprises (including the Atomic Weapons Program), which was based in the closed Russian Nuclear Cities of Snezhinsk, Zarechny and Obninsk. Blaine was based in Washington DC and Seattle, but travelled extensively to Russia. Blaine has not travelled to Russia in the last 15 years. There are many international verification programmes which include US citizens travelling to Russia, which are in operation even today. This is not proof of anything suspicious. I have also travelled to Russia. I have also worked on government sponsored projects.
It is public knowledge that Blaine set himself up as a consultancy and trading company, called the Siberia-Pacific Company in 1992. The company is registered at his home address in Seattle, with Blaine as President. US trade with Russia in 1992 was 2.6B$ and in 2018 had reached 27.5B$. Siberia-Pacific has been inactive for the last 20 years and was dissolved last year. This is not proof of anything suspicious. I am a one man consultancy company registered at my home address. I have done business in 17 different countries.
It is public knowledge that Blaine Gibson sold his parent’s home in April 2014 for $1,185,000. This would easily fund travels to various locations bordering the Indian Ocean. This is not proof of anything suspicious. It is not uncommon for children to inherit from their parents.
One Russian and two Ukrainian passengers on MH370 is not proof that MH370 was sabotaged. There were 14 different nationalities on board (not counting stolen passports from Austria and Italy). It may come as a surprise to Jeff Wise, but Russians travel too. There are flights from Russia to 110 international destinations. The volume of International flights is only surpassed by the USA. This is not proof of anything suspicious.
You may think what you will of the Jeff Wise fantasies, but his personal attack on Blaine Gibson is unfounded, deceitful, actionable and divisive. I am sure you would all join with me in defending Blaine Gibson’s integrity and his great service in helping to solve the mystery of MH370.
@TBill: In the PMDG 777 model, if you remove power from the left bus, you will see the message DATALINK LOST, among other messages. However, in the model, I don’t know a way to shutdown the ACARS without removing power to the entire SATCOM. There’s only so much realism you can expect in low-cost software.
@Richard Godfrey: Well said. Jeff Wise’s continued attacks on Blaine Gibson are despicable. Unfortunately, Blaine’s reputation is collateral damage in Wise’s futile attempt to prop up a long-discredited theory.
Thanks Richard. Jeff Wise’s attacks on Blaine and William are totally without merit. I agree with Victor that those comments are nothing more than a desperate attempt to prop up Jeff’s nonsensical theories about MH370. He should be ashamed for his statements, and his acts.
“All possible MH370 end points of flight routes in any navigation mode and any speed mode have already been searched, within at least ± 25 NM of the 7th Arc (partially ± 40 NM). This means that MH370 has either been missed in a previous search or recovered from a steep descent of around 15,000 fpm and glided out to an end point outside the previously searched area.” Yet your table above shows a path 192 ending at 40.3S. My preferred route, as previously mentioned is ~191 and ends just shy of 40S. Neither searched at any width. I am also surprised that far from being infeasible on fuel, as has been so often asserted, this table appears to show feasible pda. I’m not clear why these non-searched latitudes of roughly 39.5-40.5S would not be at the top of the list!
I am also surprised at how great the max/min and rms BTO errors are on your shortlisted 3. These are not particularly good BTO fit compared to other path solutions, c.f. Vi’s great circle paths paper, showing the most southern routes with best BTO fit (rms in the low 20s).
@Paul Smithson
You state: “Yet your table above shows a path 192 ending at 40.3S.”
The table was showing the list of all candidate regions of interest from various analysts over the years. “A number of MH370 candidate flight paths have been found over the years by various analysts resulting in Regions of Interest (ROIs) that have either already been searched or have been proposed for a further search.”
You ignore the statement that follows in both Victor’s article and in the paper “Some of the ROIs can be readily dismissed as the standard deviation BTO residual (<47 μs), standard deviation BFO residual (<4.3 Hz) or the calculated PDA (<1.5%) is too high."
The LNAV192 route that you reference has a standard deviation BFO residual of over 6 Hz. This is too high in my view and disqualifies the route.
The reason that non-searched latitudes of roughly 39.5-40.5S are not at the top of the list is because in general the BTO residuals and BFO residuals are too high (please see Figure 16 and 17 in the linked paper).
You further state "My preferred route, as previously mentioned is ~191 and ends just shy of 40S."
I will be pleased to run a flight path LNAV191.0 CM 0.84 FL410 through my model if you wish, or would you prefer a different initial bearing, navigation mode, speed mode or flight level?
In any case, at this stage we are only making an initial recommendation and all possible ROI candidates will be evaluated again in more detail.
@Paul Smithson
You stated “I am also surprised at how great the max/min and rms BTO errors are on your shortlisted 3. These are not particularly good BTO fit compared to other path solutions, c.f. Vi’s great circle paths paper, showing the most southern routes with best BTO fit (rms in the low 20s).”
The purpose of the paper presented here is to give the results of the wide scan search.
Victor’s purpose in his article on great circle paths in 2017 was evaluating specific flight routes.
Bobby has pointed out that the goal is not to find a flight route with all BTORs = 0 µs and all BFORs = 0 Hz.
Again I repeat my offer to run a flight route of your choosing through my model, so we can compare the results of your model and mine.
@Richard
Using BFOR as a route qualifier is not sound from a mathematical standpoint for reasons I have voiced here several times (BFO data is neither stationary nor ergodic and STDEV should not be used). Because one can compute a BFOR does not mean that it has significance.
Your CTT160 and CTT158 routes look very good otherwise.
Richard Godfrey: “finally planted in 27 locations in 7 countries”
I don’t think JW ever stipulated that. The debris doesn’t need to be planted at different times in different places, but it would be enough to throw it all into the water somewhere, preferably somewhere near ARC7 and let the currents do the rest.
@DennisW,
You said: “Using BFOR as a route qualifier is not sound from a mathematical standpoint for reasons I have voiced here several times (BFO data is neither stationary nor ergodic and STDEV should not be used). Because one can compute a BFOR does not mean that it has significance.”
You keep repeating the same mistakes and reaching the same, and incorrect, conclusion. This has previously been discussed at length on this forum by Mike and me in comments made specifically to you.
Here (again) are the FACTS:
1. The BFO reading noise comprises multiple components, including random electronic noise in the GES frequency measurement equipment, pseudo-random frequency errors impressed on the transmitted frequency by limited precision trigonometric functions in the frequency compensation algorithm in the AES, and frequency drift (frequency noise) in the OCXO in the SDU.
2. The frequency drift of the OCXO is characterized by the Allan variance, and it is non-ergodic and non-stationary.
3. The time scale for the OCXO Allan variance (i.e., the OCXO frequency drift) to become significant or dominant relative to the other sources of BFO reading error is days.
4. Applying the specified Allan variance for the OCXO on short time scales (seconds to minutes) shows that the expected magnitude of OCXO frequency drift is smaller than the observed BFO reading errors by several orders of magnitude.
5. On time scales of hours or less (i.e., during a single flight) the Allan variance effect is a negligible portion of the observed BFO reading errors. Thus DSTG’s Figure 5.5, which is the observed probability density function of BFO reading errors, is insignificantly affected by the OCXO Allan variance. That is because the mean value has been removed for each flight, which effectively removes the OCXO frequency drift characterized by the Allan variance.
6. Thus, BFO best-fit residuals, for a single flight, which lie outside the boundaries of the the PDF in Figure 5.5 are indicative of route parameter errors (NOT OCXO drift).
7. Thus, fitted BFO residuals are useful in evaluating routes during a single flight.
8. Thus, Richard (and DSTG and everyone else who has ever built a route fitter) is correct to use the BFO residuals (other than the mean value) as a route discriminator.
@Peter Norton
You stated “Richard Godfrey: “finally planted in 27 locations in 7 countries” I don’t think JW ever stipulated that.”
That is exactly what Jeff Wise stated and he names Blaine Gibson and the Russians as the perpetrators:
(1) Jeff Wise 14th April 2016
http://jeffwise.net/2016/04/14/mh370-debris-was-planted-ineptly/
“There is only one reasonable conclusion to draw from the condition of these pieces. Since natural means could not have delivered them to the locations where they were discovered, they must have been put there deliberately. They were planted.”
“Given how little inquiry had been directed at the Réunion piece, whoever planted the most recent four pieces might reasonably have assumed that the public would accept the new pieces uncritically, no matter how lackadaisical their preparation.”
“So maybe whoever planted the debris in Mozambique, South Africa, and Rodrigues weren’t lazy–maybe their understanding of human psychology simply allowed them to take the minimum steps necessary. Whether their calculation was accurate or not will now become apparent.”
(2) Jeff Wise 29th April 2016
http://jeffwise.net/2016/04/29/mh370-debris-questions-mount/
“I understand that not everyone is ready to accept that the absence of marine life can only mean that the debris was planted.”
(3) Jeff Wise 16th October 2016
http://jeffwise.net/2016/10/16/what-if-zaharie-didnt-do-it/
“Granted, we are still left with the issue of the MH370 debris that has been collected from the shores of the western Indian Ocean. Many people instinctively recoil from the idea that this debris could have been planted”
(4) Jeff Wise 10th December 2016
http://jeffwise.net/2016/12/10/is-blaine-alan-gibson-planting-mh370-debris/
“I find it quite extraordinary that a purported piece of MH370 apparently washed up on the shore within half an hour of Blaine’s passing by the spot.”
(5) Jeff Wise 10th March 2019
http://jeffwise.net/2019/03/10/who-is-blaine-alan-gibson/
“If the hijacking of MH370 was a Russian plot, and MH370 flew to Kazakhstan, then the pieces of debris collected in the western Indian Ocean must have been planted by the Russians in an effort to support the misleading southern narrative. Blaine Alan Gibson had demonstrated an uncanny knack for locating and publicizing this debris. Was Gibson somehow connected to Russia?”
(6) Jeff Wise 28th June 2019
https://onezero.medium.com/the-mystery-behind-the-missing-malaysia-airlines-flight-isnt-solved-yet-476f65d9b597
“But Langewiesche finds the idea of planting evidence inconceivable — mainly, it seems, because a large proportion of the debris was found by an American named Blaine Alan Gibson. And here, I think, is where his story really goes off the rails.”
@Niels
You asked “Could you perhaps help to evaluate the proposed route (21:11:02 onwards)?”
The key parameters of your case C are as follows:
– LRC to fuel exhaustion.
– FL 335.3.
– 21:11:02 position of 9.191°S, 93.692°E.
– Constant track after 21:11:02 of 178.098 degrees.
Here are the results for MH370 Flight Path Model V19.7 RG CTT LRC FL335.3 178.098 Niels Case C:
https://www.dropbox.com/s/xmavpyw8hzixug4/MH370%20Flight%20Path%20Model%20V19.7%20RG%20CTT%20LRC%20FL335.3%20178.098%20Niels%20Case%20C%20Full%20Report.png?dl=0
The BTOR, BFOR and PDA all appear to fit from 21:11:02 UTC onwards.
I will examine similar flight paths CTT178.098 LRC FL335.5 from 19:30 UTC onwards with a full set of correlation coefficients.
Re BFO. I thought that the consensus now was that BFO error under ~7hz should not be considered as a “hard discriminator”, although lower BFO errors would be expected/preferred. Dr B says that oscillator drift occurs only over longer timescales and appears to be saying that BFO is “back in the game” as a hard criterion for solution selection. Do others with expert knowledge of oscillator characteristics agree? Dr B, does your view still hold in the case of an oscillator that has been power-cycled? With the possibility of much colder ambient temp (and temp gradients within the temp-stabilised casing)?
Re Fuel. I am also confused (but pleasantly surprised) that 40S seems to be fuel feasible (PDA 1.3 – 1.4). In previous correspondence, Dr B was adamant that this was not even remotely reachable, even with packs off. Could one of the authors please explain how the estimate of fuel requirement for southerly paths has changed so radically?
@Paul Smithson
(1) Re BFO please see the comment from DrB at 04:40 am today (above).
(2) Re PDA it has not changed, Bobby, Victor and I all have different models.
(3) I note you have declined my offer to model a flight path of your choosing.
(4) What results does your model give for your preferred path ca. 191, in particular for BTORs, BFORs and PDA?
@DrB
The time scale for the OCXO Allan variance (i.e., the OCXO frequency drift) to become significant or dominant relative to the other sources of BFO reading error is days.
You might want to check out figure 5.4 of the DSTG book. The random walk behavior of quartz oscillators begins at about 100 seconds.
https://photos.app.goo.gl/uxMW4mxeoagvGr1S7
@DrB
You might also ponder why no oscillator manufacturer uses mean and variance (Gaussian statistics) to characterize oscillator behavior.
@DennisW,
You continue to ignore actual facts.
First you said: “You might want to check out figure 5.4 of the DSTG book. The random walk behavior of quartz oscillators begins at about 100 seconds.”
The feature displayed in Figure 5.4 has already been explained (to you directly) by @airlandseaman. He was told that less-than-2-hour excursion was not identified on other flights and actually repeated ( i.e., re-traced) on the return flight. DSTG properly concluded it had a different cause than oscillator drift.
Even if oscillator drift begins at 100 seconds, that does not demonstrate it was significant in amplitude. In fact, we do know that occasionally drifts of 16 Hz occurred over periods typically of several days (about 172,800 seconds). Over a period of 100 seconds, the same oscillator would exhibit an amplitude reduction by a factor of SQRT(100/172,800) = 42. So at 100 seconds the worst-case amplitude could be as large as 16/42 = 0.4 Hz, and thus be insignificant compared to other BFO reading noise sources (which have nothing to do with the OCXO).
You also said: “You might also ponder why no oscillator manufacturer uses mean and variance (Gaussian statistics) to characterize oscillator behavior.”
You continue to conflate oscillator frequency noise with BFO reading error. They are NOT the same thing. You continue to ignore the fact that the BFO reading error is NOT dominated by OCXO frequency drift during a single flight. The major contributors to BFO reading error DO have repeatable statistics, including mean and standard deviation.
@Richard. Thank you for taking the time to respond. However, your defensive tone implies that you read some sort of veiled offense into my remarks?
1) Yes, it was to that post that my query referred. And you didn’t answer the question
2) I’d like to hope that your different models don’t produce answers that vary +/- 2 percentage points PDA.
3) Where did I say that I had declined your offer?
@paul smithson,
You said: “Dr B, does your view still hold in the case of an oscillator that has been power-cycled? With the possibility of much colder ambient temp (and temp gradients within the temp-stabilised casing)?”
As I have previously explained, there is no reason to think the frequency drift characteristics of the OCXO would be changed by thermal cycling. I do allow the BFO bias frequency to be different after 18:24 to accommodate the possibility that the SDU was cold soaked to -55C during the previous hour. We now know that the change in bias frequency compared to take-off was at most 3-4 Hz, so either the cold soak did not occur or it did not shift the OCXO frequency substantially.
@Paul Smithson
When did you accept my offer or answer my question regarding your model?
@DrB
The feature displayed in Figure 5.4 has already been explained (to you directly) by @airlandseaman. He was told that less-than-2-hour excursion was not identified on other flights and actually repeated ( i.e., re-traced) on the return flight. DSTG properly concluded it had a different cause than oscillator drift.
I don’t recall that exchange, but I will take your word for it. Was the cause ever explained or are you choosing to simply ignore it? If we had the data from previous flights we could characterize typical BFO error associated with oscillator drift. As it stands I would not use BFO as a path qualifier.
@DennisW,
DSTG determined that particular event had a “geographical dependence”. They never identified a specific cause, nor were similar occurrences noted. DSTG does not say whether this event was included in the histogram in Figure 5.5, which is what I used for my BFOR reading error model.
If you ever create a route fitter, you are free to choose whatever criteria you wish to use. However, as I have said before, the major value of the BFOs is to require a Southern Hemisphere solution. With only that, the answer is unchanged. The only ROI which is consistent with all the data is LNAV 180. Adding the standard deviation of the BFORs produces stronger rejection of more southerly and more northerly routes, but these are also rejected without the BFORs.
@DrB
“determined” = “speculative”. No matter. I am off this subject. Be careful :-).
Dr B. Thank you for your response. I understand you to be saying that a step-change of bias freq after cold-soak is conceivable, but not drift of growing amplitude. I’m not sure what the basis is for your confidence that “We now know that the change in bias frequency compared to take-off was at most 3-4 Hz”? Could you please elaborate?
@Richard
Thank you for evaluating “Case C”. The results are encouraging. The main difference with “Case A” is that for each chosen FFB (in the range of 150 Hz – 153 Hz with 0.5 Hz steps), I minimized the variance(track) for the interval 21:11 – 00:19 instead of for the interval 19:41 – 00:19 [by varying the starting lat, lon only]. This results in a much straighter track in the 21:11 – 00:19 interval.
Furthermore I select the flight level for each FFB/path by subsequently minimizing the mean error in TAS (error defined as the difference between calculated TAS and expected TAS for LRC). The path (FFB) that is finally selected as “optimum” is the one having the smallest RMS(delta_TAS). The key parameters (FL, mean track and 21:11 position) are directly extracted from the data sheets.
Note that the path estimator indicates a path roughly from BEDAX through ISBIX to the 21:11 position (ISBIX pass around 19:57 UTC) and a settling at the near 178 degrees track in the vicinity of the 21:11 position, which is less than 100 nm north of BEBIM. The speed profile indicates that perhaps the FL was gradually increasing until about the 21:11 position as well (and then settled at a constant level). The indicated 19:41 position is 2.36, 93.75 (BTO calculation for 11 km) at a GS of about 432 kts.
Finally: this is all based on a “best fit” interpolation of BFO and BTO data, which not necessarily represents the “true” BFO and BTO curves.
@paul smithson,
You said: ” I’m not sure what the basis is for your confidence that “We now know that the change in bias frequency compared to take-off was at most 3-4 Hz”? Could you please elaborate?”
This conclusion is based on the fact that all ROIs which show > 1% probability of being the True route also have 19:41-00:11 mean BFORs near -3 Hz.
Dr B. Thanks for the response. But is there not a degree of circularity in that reasoning? I’d be more comfortable with some experimental evidence of the behaviour of the equipment in question.
@Paul Smithson said: I’d be more comfortable with some experimental evidence of the behaviour of the equipment in question.
There is experimental evidence of a shift in frequency bias after a power up for the SDU on 9M-MRO. From a previous post:
It turns out there is an effect called “retrace” that causes oscillators that are powered down, cooled, and powered up to shift in frequency, and there are indications that a retrace shift of about -4 Hz occurred while 9M-MRO was on the ground at KLIA before the MH370 flight. A similar shift, but in the opposite direction (up) might have occurred due to the inflight power cycling.
@Victor @Richard
Catching up on my reading, do we have handy link to “How to play Russian Roulette and Win”…trying to recall if I read that paper.
@paul smithson,
You said:”Dr B. Thanks for the response. But is there not a degree of circularity in that reasoning?”
Actually, no there isn’t. The few ROIs which show a significant probability of being the True Route, when the BFORs are not included at all in the statistics list, have mean BFORs near -3 Hz. Those same ROIs also have the best match to the expected BFOR standard deviation.
@Richard:
re debris: thank you, I stand corrected
@DrB
@Richard
Gents, like Paul, I was very surprised to read that there are sub-39°S termini returning feasible PDAs. I’m sure that I can recall previous discussions where DrB’s fuel flow model effectively limited termini to around 38.5°S.
Is there a different base assumption between DrB’s earlier work and Richard’s most recent work that explains the difference?
@Andrew Just to say thank you very much for your helpful reply to my comment on the previous blog about the 737 Max. I have only just seen it. I appreciate the time you took to explain. Thanks! Julia
@Mick Gilbert, @Paul Smithson
The fuel endurance and fuel range calculations are complicated and based on many assumptions.
The last ACARS message at 17:06:43 UTC shows that the aircraft Gross Weight was 480,600 lbs (rounded to the nearest 100 lbs) and the Fuel Weight was 43,800 kg (rounded to the nearest 100 kg). This would make the aircraft Zero Full Weight (ZFW) 217,997 kg – 43,800 kg = 174,197 kg. The Malaysian Safety Investigation report states the ZFW is 174,369 kg. What was the precise amount of fuel at 17:06:43 UTC? What was the ZFW? What was distribution between the fuel tanks?
The last ACARS message was at 5.299°N 102.813°E at 35,004 feet and before the diversion after waypoint IGARI. The flight path between 17:06:43 UTC and 18:22:27 UTC is not precisely known, the flight path between 18:22:27 UTC and 19:41:03 UTC is not known at all and the flight path between 19:41:03 UTC and 00:19:37 UTC is not precisely known. What speed mode was selected? What navigation mode was selected? What Flight Level was selected? Was there any climbs or descents? Was there any step climbs? Was there an intermediate landing or attempted landing?
The fuel used is dependent on time, aircraft weight, fuel flow coefficients, temperature deviation from ISA, Mach, Performance Degradation Allowance of each engine, speed mode (Constant Mach, LRC, MRC, ECON, etc) and other loads on the engine (Integrated Drive Generators, Bleed Air System). We are told in a Rolls Royce report that the right engine fuel consumption is greater than the left engine fuel consumption. Was there any fuel transfer between tanks? What was the actual PDA of each engine?
The TAS for a given Mach depends on the Outside Air Temperature (OAT) at the Flight Level chosen. The Ground Speed depends on the navigation mode, Wind Speed and Wind Direction. The range will depend on head/tail/cross winds encountered over the whole flight path. I use the GDAS weather data, but this is only available every integer degree of Latitude and Longitude, every 50 hPa of Pressure Altitude and every 3 hours in time. A quadrilinear interpolation has to be made. I analysed the dynamic in the GDAS for the MH370 solution space from 15°N to 40°S and from 80°E to 105°E, from 150 hPa to 350 hPa and from 18:00 UTC to 03:00 UTC+1. (1) As you would expect, the OAT changes predominantly with Altitude by on average -10.37°C per 50 hPa (worst case -17.1°C), but little over 1° Lat/Lon or time (worst case -3.6°C over 1° Lat). (2) The Wind Speed changes predominantly with Time and Altitude (worst case -120.74 knots over 3 hours), but less over 1° Lat/Lon (worst case -34.68 knots over 1° Lat). (3) The Wind Direction changes significantly with Time, Latitude, Longitude and Altitude (worst case ±180.0°T). I analysed the ACARS vs GDAS for MH371. During one stable part of the cruise, the differences between the GDAS model and the actual ACARS data were as follows: The OAT Actual – Predicted had a Mean Error of -1.0 °C and Standard Deviation of 2.5 °C. The WSPD Actual – Predicted had a Mean Error of -0.8 knots and Standard Deviation of 1.3 knots. The WDIR Actual – Predicted had a Mean Error of +1.6 degT and Standard Deviation of 6.8 degT. What was the actual weather data for a particular flight path? What is the accuracy of the GDAS data used to model a particular flight path?
I do not claim to have made all the right assumptions or correct calculations. Bobby’s fuel model is probably more accurate than mine and Bobby certainly simulates the end of flight more precisely with the INOP after the first engine flame out prior to 00:11:00 UTC and MEFE after the second engine flame out at around 00:17:30 UTC more precisely than I do, with the resulting engine restart attempts, APU start, speed reduction and altitude loss. We agree quite closely on the aircraft and fuel weight at 19:30 UTC. There are small differences in the temperature and winds over the course of the next ca. 5 hours of flight. There are large differences in the end of flight simulation.
I am genuinely open to see whether a flight path as proposed by Paul Smithson at 191° to 40°S fits the data we have. As you can see, there is a huge difference between a LNAV191, CTT191, CTH191, CMT191 or CMH191 path. There is also a huge difference between a LNAV191 CM 0.84 FL410 and a LNAV191 LRC FL350. There is no generic statement that all 191 flight paths fit the fuel data or not.
@Julia Farrington
You’re very welcome!
@TBill
You asked: “Catching up on my reading, do we have handy link to “How to play Russian Roulette and Win”…trying to recall if I read that paper.”
The link to the paper can be found in this comment:
http://mh370.radiantphysics.com/2019/01/12/mh370-flight-around-penang/#comment-21779
@Paul Smithson
You stated:”@Richard. Thank you for taking the time to respond. However, your defensive tone implies that you read some sort of veiled offense into my remarks?”.
Thank you for taking the time to criticise the new paper.
Your offensive tone was not veiled. You started to throw rocks at the new paper, less than 2 hours after publication.
Since you meanwhile complain, that I was wrong to say that you had rejected my offer, when are you actually going to answer my question regarding the key parameters of your proposed flight path and accept my offer to model your flight path? I only need to know navigation mode, flight level and speed mode.
I wanted to compare your results with mine.
@Richard
Very nice paper…I like that Feb_2019 “Russian Roulette” paper very much. I will have some questions upon further review. Briefly, I am thinking, yes, Left and Right buses off at IGARI to go dark and maybe cut off DCDR recording session, and perhaps other side benefits. This potentially ties in with William Langewiesche’s recent article where, if I undertsand, he suggests all power off at IGARI.
Correction: DFDR (flight data recorder)
@Mick Gilbert,
You said:”Gents, like Paul, I was very surprised to read that there are sub-39°S termini returning feasible PDAs. I’m sure that I can recall previous discussions where DrB’s fuel flow model effectively limited termini to around 38.5°S.
Is there a different base assumption between DrB’s earlier work and Richard’s most recent work that explains the difference?”
Neither Richard’s paper nor his comments say the PDA is acceptable for routes ending circa 40S. In fact, those routes have unacceptable BTO residuals, unacceptable BFO residuals, and unacceptable PDAs.
Richard’s subsequent comment aptly summarizes all the aircraft and environmental factors which affect fuel consumption. There is a Region of Interest (ROI) at 191/192 degrees for “straight” paths. This route requires very high true air speed in order to roughly match the BTOs. Very high air speed results in a serious degradation in fuel mileage, and, using my fuel model, this produces a large fuel shortfall (~5%) for this ROI, ending circa 40.3S. This fuel shortfall cannot be fully compensated by turning off bleed air and one IDG. If one ignores the BTOs and flies slower at MRC, the range is maximized and 40S becomes marginally possible with bleed air off. However, the disagreement in BTOs is hopelessly large. So, it’s one thing to draw a maximum range arc, and then extend it by several percent assuming bleed air was off the entire time after circa 17:30, but such a route is incompatible with both BTOs and BFOs
@TBill
You stated: “@Richard Very nice paper…I like that Feb_2019 “Russian Roulette” paper very much.”
Many thanks!
It is encouraging to receive a compliment.
This is especially true since the “Russian Roulette” paper took 6 weeks to produce and the “Blowin’ in the Wind” paper took 4.5 months to produce.
@Peter Norton
You stated “@Richard: re debris: thank you, I stand corrected”
No worries! It takes a Gentleman to say, “I stand corrected”.
@Richard & co-authors
Many thanks for sharing your new paper, summarizing past months systematic scan for flight paths that fit the data “within appropriate tolerances”. It is an impressive and important effort, which deserves careful reading. I’m still studying some parts more in detail, however for now on one point I would like to ask you to explain a bit further.
In the discussion part, the ROI 1 is mentioned (LNAV180 CM 0.84 FL403), which seems to be a bit high on the STDEV BTOR.
In the method part, at slightly lower FL390 and LRC speed setting, fig. 4 and fig. 5 give slightly lover values for STDEV BTOR / RMS BTOR.
In the conclusions reference is made to “Long Range Cruise speed mode and at a flight level between FL390 and FL403”.
Should I read from this that some optimization is still ongoing regarding the LNAV180 path? What is the typical margin on the 7th arc latitude?
@Richard
@DrB
Thank you, gentlemen, for your separate responses. Much appreciated, as always.
@Richard
It is encouraging to receive a compliment.
It is, indeed. Even more important is a careful read, and considered feedback. As a VP in a previous life responsible for a significant P&L, I nevertheless sat through every design review and code review. It sent a strong message to the team that I considered them to be important, and I took the time to prepare with diligence.
As you know (or should know), I have a high regard for your work. The fact that I am critical of your (and DrB’s) recent efforts is not a reflection on your competence (or DrB’s). It is simply my deep seated belief that a reliance on BFO as a path qualifier is a mistake. I would be happy to be wrong, and there is ample precedence for that.
However, to not comment would be out of character for me. I am too old for that.
@DrB
Bobby, I understand that you are saying that Richard’s LNAV192 CM0.838 FL355 route terminating at 40.30S has unacceptable BTO and BFO residuals but the PDA for that route is 1.2835%.
Given that the nominal PDA is 1.5%, is 1.2835% unacceptable?
@Mick Gilbert,
My LNAV 192.26 route at M0.84 and FL355 ends at S40.3 and has a PDA of -4.1% for a MEFE at 00:17:30. That PDA is obviously unacceptable, and that is why I said so. The PDA will be reduced in order to accommodate the high air speed, relatively low altitude, and elevated SAT on this night on this route, all of which increase the fuel flow.
Richard’s value for PDA, as given in the table in this post and which you quoted, is much different. We shall investigate this difference and report back.
@Mick Gilbert: To look at the PDA for a path that has unacceptable BTO error doesn’t have much meaning (unless you are questioning our understanding of the BTO values).
In the previous article on great circle paths, which limited the survey to FL350, by observing Figure 2 and the results in the CSV file, you can see that for a track angle of 192° at 19:41, the paths cross the 7th arc near 40S latitude. If the speed mode is constant Mach number, the BTO error is acceptable (21.3 μs RMS), but the required speed is M0.842, which is substantially higher than LRC speed, and there is insufficient fuel. (For the time period after 19:41, LRC corresponds to an average speed of about M0.81.) On the other hand, if the speed mode is LRC, less fuel is consumed, but the BTO error increases to 91.7 μs, which is unacceptable. It is misleading to consider fuel consumption without also considering BTO error.
@Mick Gilbert @Paul Smithson
My apologies!
The entry for the LNAV192 CM 0.838 FL355 in the table above is not correct.
This values came form an old version of my model by mistake.
I have checked this flight path again with my latest version.
Bobby is right that this flight path does not fit the fuel consumption, BTORs or BFORs.
I also get a negative PDA for a MEFE at 00:17:30 UTC, high BTORs and high BFORs.
I will run a thorough check on all the values in the table.
This flight path candidate remains disqualified, even more so than before.
@Victor Iannello
Thank you Victor. No, I am not questioning our understanding of BTO values.
I am not interested in fitting a route. What I am interested in is establishing the southernmost bound on the 7th arc based on the fuel modelling. I thought that had been established at around 38.5°S. Richard’s recent paper seemed to call that into question.
Accordingly, what I was questioning was the apparent marked difference between the PDA values as originally published by DrB and those published by Richard for not overly dissimilar routes.
DrB has acknowledged that difference and will investigate. I will standby to stand by.
@Richard
@DrB
Okey doke, thanks Richard.
That issue aside, your paper (like the many that have gone before it) represents a considerable body of work and scholarship. It was somewhat remiss of me not to have acknowledged that earlier.
Similarly, I was remiss in not acknowledging DrB’s earlier work on the fuel modelling.
So, a formal thank you to you both and a thank you to Victor for making the your efforts and the ensuing discussions widely accessible.
@Richard, I am glad that you have identified the reason for the apparent discrepancy on fuel feasibility of the 190-192 paths.
@Mick Gilbert
Many thanks for your kind words and thanks.
@Niels
You asked: “Should I read from this that some optimization is still ongoing regarding the LNAV180 path? What is the typical margin on the 7th arc latitude?”
(1) Yes, we are still comparing models in a comprehensive test program. There may be minor adjustments to come.
(2) Our 3 models are very close for the LNAV180 LRC FL390, but subject to a number of assumptions. Bobby is doing a sensitivity analysis and we will then be in a better position to state typical margins.
@Mick Gilbert,
My work on the fuel flow modeling took over 1,000 hours and 10 months to complete. However, it would not have been possible to achieve the desired accuracy were it not for data provided me by ATSB under a non-disclosure agreement and also non-public B777 information provided me by a confidential source. Both were extremely helpful.
Some comments on PDA
PDAs, in the way that they have been calculated in the recent work by Richard, DrB and Victor, are are a useful discriminator in validating, or eliminating, possible flight tracks. However, what is being calculated is not actually a PDA at all. Rather it is a variation, or delta, from the fuel burn that would normally be expected from Boeing data that would apply to the particular circumstances relating to speed, altitude, temperature, pressure, wind etc, etc, and will include actual differences in engine efficiency from nominal, for for the flight track in question.
PDA, on the other hand, is the Performance Degradation Allowance used in flight planning to determine the additional fuel to be uplifted, making an allowance for the age, and hence the reduction in efficiency from a new (maybe nominal) engine. The PDA for every engine can therefore be different, but by definition the PDA will never be negative. Because it is not unusual for engines on a particular airframe to have significantly different Time in Service, I suppose it is also possible that the PDAs might be averaged for flight planning purposes.
I think we know, both from ACARS data, and from other sources (and DrB is privy to other information) that the “average” PDA for MH370 is of the order of 1.5%. I think we also know that it would be unusual for the PDA of any engine to exceed 3%. But it can’t be negative.
If, as a result of the modelling it is determined that the delta in fuel burn for a particular track turns out to be -x%, then that in itself is interesting. But the reason is not necessarily just related to the PDA itself. It is the variation in overall performance of the aircraft from that which would be expected, bearing in mind the variability (or uncertainty) of all the other factors that affect fuel burn for the flight track being modelled.
I think understand how the PDA is being used in the modelling, (Richard and DrB . . I am open to correction if I have it wrong), but perhaps it would be more appropriate to define some other term to describe the variability in overall fuel burn. (DeltaF) Actually this new variable can of course be compared to the known PDA range for MH370.
Am I being overly pedantic? Perhaps.
@Richard, DrB
What I don’t understand in your fuel flow analysis / PDA estimates (and using this as one of the path selection criteria) is how you estimate the initial (19:41) fuel quantity. Can you please explain?
Imo, either it is an unknown (in which case you have an extra degree of freedom in the problem), or it is determined by calculating back and assuming fuel exhaustion (somewhere in the 00:11 – 00:19 interval) in which case you have to work with a fixed PDA.
@Brian Anderson
Switching off an Integrated Drive Generator (IDG) or shedding load from an IDG and/or switching off the Bleed Air System can reduce the fuel consumption of an Engine. I did think of introducing a new term such as Performance Improvement Allowance (PIA) for this case, but found it more confusing having 2 terms PDA and PIA, rather than allowing the PDA to go negative. I agree we are abusing the original definition and intent of the term PDA.
@Richard,
I think two terms are unnecessary, because even if you introduce a new one which is allowed to go negative, the PDA in the model is still an amalgam of the real PDA, and other factors that cause a change in the nominal fuel burn. (e.g. load shedding etc).
It is sufficient to define a new term, say DeltaF, which replaces the current PDA. Then variations identified in the DeltaF, which might be positive or negative, can be compared with the real PDA, and possibly explained by such things as load shedding.
@Brian Anderson
Interesting point – the overall performance degradation from the book figures is related to both the engines and airframe. Airlines use airplane performance monitoring (APM) programs to determine a performance degradation factor for flight planning purposes, based on cruise performance reports sent from the aircraft. The same factor is entered into the FMC to provide the pilots with accurate in-flight predictions of the fuel remaining at flight planned waypoints and destination. Boeing refers to it as the FF (Fuel flow) factor, while Airbus uses the term PERF (Performance) factor.
As an aside, it is possible to have a FF/PERF factor less than zero, because the book level reflects the fleet average of new aircraft and engines. There is inevitably a scatter that leads to performance above and below the book value for newly delivered aircraft and indeed, some older aircraft. We have several B777-300ERs (not new!) in our fleet that have FF factors below zero. Airbus uses a PERF factor as low as -2.0% for new deliveries with certain airframe/engine combinations.
@Andrew,
Yes, it’s an interesting question. I thought that the PDA number related to a particular engine, and stayed with that engine. i.e. increased progressively through the life of the engine.
I understand the concept of the FF, or the PERF, in that it includes variabilities in the airframe too. However, it must be indeterminate on day one, or at least until sufficient cruise data, or data related to a typical flight profile, is collected. Then if an engine is changed out the data collection must begin again.
@Brian Anderson
There is a PDA for each engine, used mainly for engineering purposes. The FF/PERF factor is more relevant for estimating fuel burn, because it reflects the difference between the airframe/engine combination and the book figures. The PDA normally increases through the life of the engine, but the FF/PERF factor might go down if engineering work is done on the airframe that reduces drag (eg seal replacement, flight control/door rigging), or there is an engine change that results in a lower PDA.
The actual FF/PERF factor is ‘indeterminate’ on day one, as you mentioned. For the A330, Airbus has standard factors that it uses at delivery, depending on the engine type. For example, the A330-343 with Trent 772B-60 engines uses a PERF factor of -2.0% at delivery. That factor is adjusted once the aircraft enters service and data is collected using the APM program. The factors are regularly updated to reflect changes in engine/airframe performance, as determined by the APM program. One of our A330s has a PERF factor of -2.7%, and that’s a 15-year old aircraft!
Some references that might be of interest:
Getting to grips with aircraft performance monitoring
Aircraft performance monitoring from flight data
Airbus Regional Seminar – Aircraft performance monitoring
@Andrew, @Brian Anderson: To be clear, the value of 1.5% that we use is the fuel flow (FF) factor, as per the fuel analysis for MH370. We really don’t know the PDAs for the engines. We also don’t know the drag factor, which is used by the FMC to plan and manage the descent. That said, semantics aside, I don’t think that there is a fundamental error in calculating a PDA (FF factor) based on the estimated time of fuel exhaustion, and then comparing that calculated value of PDA (FF factor) to the value that is expected.
9M-MRO Fuel Flow Factors
1. A parameter called “PDA” is used by MAS to predict the fuel loaded for each flight. It is used in the MH370 Flight Plan, and its value is +1.5%, which is a very reasonable value for an average of the fuel flows of 9M-MRO’s two engines in cruise. MAS may be using the term “PDA” in a different fashion than other airlines or manufacturers, who want to keep track of engine and airframe efficiencies separately.
2. As far as I know, there is no other fuel flow efficiency factor used in the MH370 Flight Plan.
3. I believe the “PDA” value used by MAS in their flight planning is based on actual fuel consumption data for that airframe and those engines. In other words, the 1.5% PDA as used by MAS is for 9M-MRO, not just for the engines. Thus the value used by MAS may actually be a fuel flow factor (as an excess % relative to the Boeing fuel flow tables).
4. I have engineering data from ATSB from a prior 9M-MRO flight. This includes frequent readings of both fuel flow meters and both fuel quantity gages. In cruise, the ratio of R/L readings is near 1.02, but it does vary slightly between fuel quantity sensors and the fuel flow sensors, both of which have accuracies of about 1%. Using the fuel quantity sensors, the ratio is 1.021. This implies the R engine will flame out about 16 minutes prior to when the L engine would flame out if the L engine fuel flow were not increased substantially during the INOP condition after R engine flame out. This does occur in practice, and it reduces the time difference between actual R and L engine flame outs below 16 minutes.
5. My estimate of the R engine “PDA” is +2.45% and for the L engine it is +0.45%.
6. There is no need (or means) for us to separate engine and airframe effects for 9M-MRO, and I have used the (combined) parameter “PDA” (or FFF) in the same way as MAS uses it for flight planning.
7. Some of the routes we analyze have predicted “PDAs” (or FFFs) substantially different than +1.5%. That indicates errors in the route parameters, assuming the aircraft is being flown in its normal configuration.
8. Abnormal aircraft configurations are possible which can save (or waste) fuel. One can assume the bleed air is turned off, for instance, which can reduce fuel flows by about 2%. This is equivalent to a reduction in the FFF of 2% (which then gets into negative percentages).
9. It may be less confusing to call the predicted amount of differential fuel flow a predicted fuel flow factor (FFF) rather than a predicted PDA. I don’t object to doing that. Whatever you call it, the value of that parameter, compared to the +1.5% used by MAS, is a vital part of any route feasibility determination.
@DrB: In the “Fuel Analysis” for flight MH370, there is a parameter called “PER FACTOR” and in the “Flight Brief” there is a parameter called “FF FACTOR”. The value of both parameters is P1.5, i.e, +1.5%. Meanwhile, in the FMC, there are two parameters called “DRAG” and “FF” (which get entered on the same line). I don’t see any specific reference to PDA. It would be the FF FACTOR (=PER FACTOR) that gets entered into the FMC.
I don’t think it is worth the effort to rename the PDA parameter. We all understand what is meant.
@Victor Iannello,
You are correct. The MH370 Flight Brief correctly uses the term “FF Factor”.
@Niels:
You asked: “What I don’t understand in your fuel flow analysis / PDA estimates (and using this as one of the path selection criteria) is how you estimate the initial (19:41) fuel quantity. Can you please explain?”
Here is a summary of my fuel/endurance model particulars:
1. Assume Zero Fuel Weight = 174.369 tonnes.
2. Start model at 17:06:43 with 43.8 tonnes total from last ACARS report (with 21.973 tonnes in in L and 21.827 in R tanks).
3. Assume no fuel transfers.
4. Assume in cruise the R engine fuel flow is 2.1% greater than the L engine fuel flow (based on my analysis of prior flights).
5. My fuel model has three periods.
6. Same PDA is used for all 3 periods, and it is selected for MEFE at 00:17:30.
7. First period assumes ECON with CI = 52 at FL350 from 17:07 to 17:33.
8. Second period assumes LRC at FL390. Climb to FL390 starts at 17:33.
9. Third period starts at 18:34 and continues until MEFE. Speed and altitude during the third period are the same as what is being fitted (from 19:41-00:11). Climb or descent, if needed, occurs at 18:34.
10. For the BEDAX LNAV 180 degree route, my predicted fuel weight at 19:41 is 26.8 tonnes.
11. I compute the L and R engine fuel flows and the L and R tank fuel quantities each minute. The R tank goes dry circa 00:08. I estimate there is about 580 kg of fuel in the L tank when the R tank goes dry. Then the L engine fuel flow increases to roughly 3500 kg/hr due to single-engine INOP, and increases further during the descent, and the L engine flames out at 00:17:30. So, I estimate there is about a 9.5 minute difference in flame-out times. The aircraft decelerates beginning at 00:08 during INOP, and I predict the descent begins circa 00:14.
@DrB: There is another possibility related to fuel exhaustion: If either or both of the forward and aft crossfeed valves are open, both engines may draw fuel from either tank, and both engines will flameout at almost the same time without any manual intervention. Andrew once explained that the pumps from one side will dominate over the other side, and so the draw down of the tanks might not occur symmetrically. On the other hand, if the level on one side is higher than the other, that will tend to increase the pressure from the pumps drawing from that side, and could help to maintain nearly equal levels on both sides.
@Victor
@DrB
You could call the performance degradation factor anything you please. I don’t think it matters as long as the meaning is clear. I was only trying to explain that the ‘factor’ has engine and airframe components; it is not a simple engine degradation factor, as I have seen mentioned from time to time.
@Niels
You stated “What I don’t understand in your fuel flow analysis / PDA estimates (and using this as one of the path selection criteria) is how you estimate the initial (19:41) fuel quantity. Can you please explain?”
The calculation of the fuel quantity remaining is based on a number of assumptions:
(1) The Zero Fuel Weight is correctly stated in the Malaysian SIR as 174,369 kg.
(2) The Departure Fuel Weight is correctly stated in the Malaysian SIR as 49,700 kg, left tank 24,900 kg and right tank 24,800 kg. All values ± 50 kg.
(3) The ACARS Fuel Weight at 17:06:43 UTC is 43,800 kg ± 50 kg is correct at reaching the cruise altitude of 35,000 feet.
(4) There were no fuel transfers between the tanks.
(5) There was a climb following diversion to FL390 followed by a change to LRC speed mode.
(6) The right engine fuel consumption is 2.1% greater than the left engine fuel consumption.
(7) There was no load shedding, IDG switched off or Air Bleed System switched off.
(8) The temperature deviation from ISA is correctly calculated from the GDAS data.
At 18:28:06 UTC Bobby calculates 34,571 kg fuel remaining, I calculate 34,490 kg. This is a difference of 81 kg or 0.23%.
We are both quite different from the Boeing analysis which shows 33,524 kg. This is a difference of 1,047 kg from Bobby’s result or 3.03%. Boeing assumes a descent to FL300, where at 210,000 kg aircraft weight the fuel flow/hr/engine increases from 3,277 kg/hr/engine to 3,762 kg/hr/engine.
At 19:41:03 UTC Bobby calculates 26,796 kg fuel remaining, I calculate 26,709 kg. This is a difference of 87 kg or 0.32%.
We both align within 0.5% at 18:28:06 UTC and 19:41:03 UTC.
@DrB
My apologies! I did not see your comment before writing mine. Our comments to @Niels crossed in the wires.
@Niels
You can choose which answer you prefer 😉 The nice problem of writing “@Richard, DrB”.
@Dr B. Thanks for these additional insights on the fuel model background. I understand that your assumption for one engine inop is that the running one goes to max climb thrust per Mike E and Andrew’s reports from simulations? Would you care to speculate how much longer left engine might run if company policy set max cruise rather than max climb thrust as the default for one engine operation?
@paul smithson,
You asked: “Would you care to speculate how much longer left engine might run if company policy set max cruise rather than max climb thrust as the default for one engine operation?”
I am happy to do that calculation if someone can provide the max cruise thrust.
@DrB, Richard
Many thanks for sharing the details of fuel calculations. It is good that your estimates align well, however my main worry remains, which is the unknown flight path between 18:28 and 19:41 with possible altitude and speed changes, hence with possible significant impact on 19:41 fuel quantity.
For example, would it be possible to work with an estimated 19:41 min / max value, and compare the “back calculated” fuel quantity based on fuel exhaustion and ~1.5% “PDA” with this min – max 19:41 range?
Just for a laugh, can we please run the CAPTIO flight path through this model to see how far out it is?
On a more serious note, is the simulation software, or at least the algorithms used to create it, going to be made publicly available? Could it be a GPL project on GitHub?
@Rob
Just for a laugh, can we please run the CAPTIO flight path through this model to see how far out it is?
The CAPTIO flight path is not a candidate path consistant with the assumptions baked into the model. It has course, speed, and altitude changes.
Thanks, Dr B. Unfortunately I am not able to tell you what the max cruise thrust value is. Hopefully another blog contributor may be able to.
@DrB
@PaulSmithson
RE: “I am happy to do that calculation if someone can provide the max cruise thrust.”
The figures are not published in the manuals used for everyday operations. Max cruise thrust is not a ‘certified’ rating and is not used for the calculation of aircraft performance. You would probably only find the figures in some obscure manual used by the performance engineers.
The thrust limit (CLB or CRZ) used during all-engine cruise can be modified by the airline via the FMC Airline Policy page; however, the default value is CLB thrust. The FMC only uses the CRZ thrust limit if the airline decides to modify the default settings, or the crew manually selects the CRZ thrust limit after reaching top-of-climb.
@Andrew. Thanks. Are you saying that the thrust limit for one engine inop is the same as that which has been set for all-engine cruise? And only if that default (all engine cruise) has been changed would we see something different when first engine goes down?
I don’t know whether a “thrifty” operator might prefer to reduce default max thrust available for all engine cruise? With very powerful engines and plenty of surplus thrust, would there be any *practical* performance downside to doing so?
@paul smithson
The thrust limit does not automatically change if an engine fails in the cruise. The pilots would normally activate ENG OUT on the FMC VNAV CRZ page, which changes the thrust limit to CON to provide additional thrust. Otherwise, the thrust limit remains at the setting on the airline policy page (normally CLB, but modifiable to CRZ). Sorry I didn’t make that more clear.
The downside of modifying the cruise thrust limit to CRZ is that less thrust will initially be available if an engine fails in the cruise. Consequently, the speed will decay more rapidly, particularly at altitudes close to MAX, which could have nasty consequences if the crew becomes distracted and doesn’t immediately activate ENG OUT and start descending. If the cruise thrust limit is CLB, there’s a bit more thrust available, which gives the crew a bit more time to analyse the problem before they activate ENG OUT and start descending. That said, the difference isn’t huge.
As far as I’m aware, the main purpose of the CRZ thrust limit relates to performance guarantees that are part of the contractual arrangements between Boeing and the aircraft operator. It has little or no use in everyday operations.
thanks, @andrew.
@DrB
RE: “I am happy to do that calculation if someone can provide the max cruise thrust.”
Rolls-Royce MCT: 312.3 or 343.3kN depending on engine model…
Try pg-8 at the following link:
https://www.easa.europa.eu/sites/default/files/dfu/EASA%20E%20047%20TCDS%20issue%2004.pdf
@George Tilton
Many thanks for the MCT data!
In the MH370 case, the engine is the Rolls Royce RB211 Trent 892-17.
The MCT is therefore 343.3 kN from the linked document you supplied.
@Paul Smithson: The maximum thrust at altitude can be approximated by the sea level thrust multiplied by (Pamb/Po). For instance, at FL350, the altitude correction factor is 0.235.
However, I’m missing the gist of this discussion. As @Andrew said, the difference between Maximum Continuous Thrust and Maximum Climb Thrust is small, and becomes relevant under conditions such as obstacle clearance with one engine inoperative. For instance, in the PMDG 777-200LR model with GE90-110B1L2 engines, at cruise altitude, the values for N1 for CRZ, CLB, and CON thrust limits are 97.4%, 101.0%, and 101.0%, respectively.
@George Tilton
@Richard
RE: ”Rolls-Royce MCT: 312.3 or 343.3kN depending on engine model…”
Note, the ‘MCT’ data that George provided is Max Continuous Thrust, which is a higher rating than Max Cruise Thrust. @paul smithson’s question related to Maximum Cruise Thrust.
@Victor
The discussion with @paul smithson relates to the thrust rating set by the FMC during cruise. That rating is dictated by the setting on the FMC’s AIRLINE POLICY page. It defaults to CLB thrust, but can be modified to CRZ thrust by the airline. @paul smithson originally asked @DrB ”Would you care to speculate how much longer left engine might run if company policy set max cruise rather than max climb thrust as the default for one engine operation?”.
@Andrew: My point is we are down in the weeds. With all the other unknowns (such as having an accurate drag model for the deceleration and having accurately modeled the fuel consumption from 17:07 to the first flameout), for the short amount of time between the first and second flameouts, it makes no material difference whether the thrust was CLB, CRZ, or CON.
@paul smithson,
If I understand Andrew correctly, if no pilot action were taken upon R engine flame-out, the L engine would normally go to Max Climb Thrust (CLB), unless MAS had previously changed the default to Max Cruise Thrust (CRZ). If a pilot subsequently activated ENG OUT, then the thrust limit would change to Max Continuous Thrust (CON).
If I understand the engine data sheet correctly, CON is about 17% less than CLB, the CON fuel flow would be reduced by a similar percentage and the duration between R and L engine flame-outs would be lengthened by that same percentage. This assumes a pilot activated ENG OUT.
It’s not clear to me how much less CRZ is than CON for this engine, but a lower thrust limit reduces INOP fuel flow and lengthens the INOP duration.
@DrB said: If I understand the engine data sheet correctly, CON is about 17% less than CLB
No. Maximum continuous thrust (CON) is slighter HIGHER than maximum climb thrust (CLB) (when there is a difference at all). Meanwhile, maximum takeoff thrust is significantly higher than maximum continuous thrust, as it has a 5-minute rating. Maximum cruise thrust (which is not a parameter that is certified) is several percent less than maximum climb thrust.
Also, although the FMC might default to CLB during cruise by company policy, it is trivial for the crew to change the limit from CLB to CRZ (or CON).
@Victor
RE: “My point is we are down in the weeds.”
Point taken. My post was intended to clarify @paul smithson’s question, which was related to the difference between CLB and CON thrust (you stated “…the difference between Maximum Continuous Thrust and Maximum Climb Thrust is small”). Nevertheless, I agree; the difference between the various thrust limits is small and immaterial given all the other uncertainties. My guess is the difference between the CLB and CRZ thrust fuel flows would amount to about a 30-second difference in the L engine flameout time, given @DrB’s estimated 580 kg of fuel in the L tank when the R tank goes dry.
@Andrew: Thank you so much for your input and your continued interest in the blog.
@Victor
You’re welcome. I just spotted an error in my previous post. I should have said @paul smithson’s question was related to the difference between CLB and CRZ thrust!
@Richard, @Victor, @Dr B. Some of you requested that I share precise path model details. I was not in a position to do so earlier as I have not had time to refine the models during the past 3 weeks. This path model that arises from my work on where (in BTO terms) an FMT “ought” to have occurred, so it starts from there rather from the 1941 ping ring.
I have noodled around this area with various path solutions and this is the best that I can do. The start position is very close (21 microseconds) to where my models “expect” it to be.
The parameters are:
Start 18:32:30Z
Long 95.252 Lat 7.113
LNAV
Initial track angle 190.55
FL 340 (but geo height 35000ft for purpose of BTO calcs)
Constant M0.8455 (initial TAS 499kts)
The model that I am using yields an end point of -39.54, 85.22 (this is the 7th arc crossing ie BTO=18390, rather than position at 001930). BTO residuals are: 8,7,7,-50,11 and BFO residuals are -2.1, -4.3, 4.4, 4.9, 5.4, 5.6 (the last BTO, ping 6, assumes descent of 200fpm).
Perhaps you can get an even better fit with different altitudes and more finely interpolated Wx data. I have simply used the weather array in Barry Martin’s model (0000Z, 250hPa). I did also try using Wx for higher altitudes but I think the fit was poorer and the required M number higher.
I will be particularly interested in what your various fuel models predict for this path.
I have focused primarily on LNAV path solutions to date because TT solutions a) have a 7th arc crossing further north, within the searched area – typically between 38.5S and 39.0S b) invariably have large residuals at ping 6 – requiring a massive slow-down. I say “massive” because it appears to exceed what looks feasible from a combination of greater headwind (or lower temp) over the last stage and longer period with one engine inop before second flameout (which was why I was interested in the Max CRZ vs CLB numbers).
There is, of course, a solution with initial track angle of 191.0 that terminates marginally further south. But as well as requiring slightly higher speed, I have various reasons for preferring the solution mentioned above.
FYI, the 191.0 LNAV path would be something close to:-
Start 18:31:45
Long 95.347, Lat 7.066
M0.8478 (initial TAS 500.5)
Crosses 7th arc at 39.72S
BTO residuals: 15,7,4,-54,10
BFO residuals -2.2 (1840), -4.3,4.4,5.1,5.7,5.8 (last one descending 200fpm)
I’m very pleased to see that the CMH 180 path to 34.2S is still a strong contender after all the learned investigation that has gone into this. It has long seemed the most likely, to me at least. The commentary here is generally of very good quality and still fascinating even after so much time has elapsed since the events themselves. I just wish I had the skills and knowledge to contribute more.
@Victor
Your recent paper is very good. I was thinking about the difference between your approach and the particle filter model used by DTSG 5 years ago.
It seems their particle filter generates “infinite” flight paths based on their defined maneuvering model and ranks them using the BTO/BFO data to create the PDF centered at 38 S around arc 7.
It seems that you define each candidate profile based on selecting autopilot navigation mode, speed mode, and altitude mode and rate it based on the BTO/BFO data. The 34.4 S crossing on arc 7 provides the best fit.
So for the case of an inactive pilot, the “infinite” random flights and large sample of reasonable routes confirms an arc 7 search of 34.4 to 38 S.
This appears to be a very good independent confirmation of the DSTG work for an inactive pilot.
I missed the discussion where it was determined that there could be no active pilot after 19:41.
@Ulric,
The 19:41-00:11 route which appears most likely is either LNAV (geodesic) or a Constant True Track at 180 degrees. No possible Constant Magnetic Heading routes have ever been identified as a region of Interest.
@paul smithson,
There is no need to assume a slight descent at 00:11 in order to match the BFO then. To my knowledge, no end-of-flight model predicts a descent beginning before or at 00:11. Both my end-of-flight model and Boeing’s simulations predict the descent beginning several minutes after 00:11.
@Hank,
There is no “determination” (or proof) about the presence or absence of active piloting after 19:41. However, it is quite striking that there is one and only one route for which no active piloting after 19:41 is needed in order to completely match the BTOs, BFOs, their known correlations, and the endurance. In my opinion, the presence of a unique solution is a likely indicator of correctness. At the very least, it is the most likely place to search next. If that fails, then, absent new revelations, searching elsewhere is not worthwhile because the number of possible solutions with maneuvers after 19:41 is boundless.
@DrB. The “only one route” you mention would be consistent with there being an active pilot who intervened only at fuel exhaustion, pushing the nose down into a steep final dive, APU start leading to the final transmissions.
This possibility by-passes non-replication of the timing/descent combinations of those transmissions by those unmanned Boeing simulations. Thus adding this to the unmanned possibility should enhance the search prospects of that alone. Also it can explain why there was insufficient time for IFE set-up, a piloted glide needing another explanation for that.
Thus I think that its inclusion would strengthen the case for a search based on that route.
@Dr B
Sorry, I meant the CMT 181 route identified in the table at the top of the article. You’re quite right and that will teach me to post when I’m bleary eyed.
Thanks for your comments, Dr B. Without descent the BFO at 0011 would be 9.2Hz, which looks high – particularly in comparison to the values at ping 4 and 5.
If it is not too much trouble – and at your convenience, I would be interested to see how he BTO/BFO/PDA for the 190.55 model referred above come out using your path modelling tool.
@Paul Smithson
You stated: “@Richard, @Victor, @Dr B. Some of you requested that I share precise path model details.”
Start 18:32:30Z
Long 95.252 Lat 7.113
LNAV
Initial track angle 190.55
FL 340 (but geo height 35000ft for purpose of BTO calcs)
Constant M0.8455 (initial TAS 499kts)
I will run this through my model as soon as possible.
I am currently busy with re-running the flight paths in the ROI table (Figure 8), where you kindly pointed out an error.
Thank you, @Richard – much obliged.
@David: I don’t put a lot of weight on the Boeing (no pilot input) simulations failing to reproduce the accelerating rate of descent 2 minutes after fuel exhaustion. We know that a banked descent would achieve this level of downward acceleration, so the question becomes why it took 2 minutes to get to this aerodynamic state.
I question whether the Boeing simulator accurately represents the interaction of so many complex systems that are operating beyond their rated conditions and in abnormal configurations. We also know that engine re-starts were not modeled. (In the Level D simulations that Mike Exner witnessed, an engine restart resulted in a significant roll rate.) The restart of the left engine might also reduce the available fuel for the APU, which would explain why there was no IFE log-on.
That said, it would be unwise to completely dismiss the possibility of pilot inputs after flameout. I fully acknowledge there is a finite possibility it occurred.
With all we know today, my best guess is the debris field was missed near 34.3S latitude, but I’d still put that guess at under 50%.
@DrB
In my opinion, the presence of a unique solution is a likely indicator of correctness.
Well…some mitigating feedback:
1> You picked the boundary conditions for the “unique solution” analytics.
2> You chose to cherry pick the data and ignore Figure 5.4 in the DSTG book.
3> Your terminus has been searched with a negative result.
@DrB
I only questioned the rationale for not allowing any pilot maneuvering after 19:41 and I guess there is no basis other than it simplifies the analyses. That is OK. This is all great work. I intend no criticism.
Your statement that “the number of possible solutions with maneuvers after 19:41 is boundless” contradicts the “unique solution is a likely indicator of correctness” statement.
Suppose we learn someday after MH370 is found that it crossed arc 7 at 24 S at 00:11 with fuel depleted and then entered the ocean.
Then would it be possible for someone to define one flight path with pilot engagement out of the infinite possibilities that meets all of the arc/BTO/BFO constraints. Of course the FDR would help.
@DennisW: I don’t disagree in principle with your three comments. The BEDAX-SouthPole route is not a slam-dunk. However, it may be the best candidate.
@David,
You said: “@DrB. The “only one route” you mention would be consistent with there being an active pilot who intervened only at fuel exhaustion, pushing the nose down into a steep final dive, APU start leading to the final transmissions.
This possibility by-passes non-replication of the timing/descent combinations of those transmissions by those unmanned Boeing simulations. Thus adding this to the unmanned possibility should enhance the search prospects of that alone. Also it can explain why there was insufficient time for IFE set-up, a piloted glide needing another explanation for that.
Thus I think that its inclusion would strengthen the case for a search based on that route.”
You are correct, and my coauthors and I have consistently made that point in previous comments. My personal search recommendations include redoing the search inside 25 NM first and then moving outside 25 NM if that is unsuccessful.
@Hank,
You said: “I only questioned the rationale for not allowing any pilot maneuvering after 19:41 and I guess there is no basis other than it simplifies the analyses.”
Actually, that is the only way to conduct a systematic search that will lead to one or a few solutions. Technically, our assumption is no pilot maneuvers between 19:41 and 00:11.
You also said: “Your statement that “the number of possible solutions with maneuvers after 19:41 is boundless” contradicts the “unique solution is a likely indicator of correctness” statement.”
Everyone has an opinion. My opinion is that the chances that any actual route with significant maneuvers after 19:41 would have a unique solution assuming no maneuvers is extremely low.
You also said: “Suppose we learn someday after MH370 is found that it crossed arc 7 at 24 S at 00:11 with fuel depleted and then entered the ocean. Then would it be possible for someone to define one flight path with pilot engagement out of the infinite possibilities that meets all of the arc/BTO/BFO constraints. Of course the FDR would help.”
Actually Arc 7 is at 00:19. In general, there would be multiple solutions derivable from the satellite data plus an end point. FDR data for the entire flight would be required to fix the actual route.
@Dennis,
You said: “1> You picked the boundary conditions for the “unique solution” analytics.
2> You chose to cherry pick the data and ignore Figure 5.4 in the DSTG book.
3> Your terminus has been searched with a negative result.”
Regarding #1, our assumptions are essentially only 2: (1) the route is flyable on 9M-MRO’s autopilot, and (2) no pilot maneuvers were performed between 19:41 and 00:11. The assumptions we used have been around since 2014. The conditions on the BTO and BFO statistics and correlations are not assumptions. They are observed and inferred characteristics. I have no clue what you mean about picking “boundary conditions”.
Regarding #2, @airlandseaman provided significant and new information regarding Figure 5.4, which you continue to ignore. Please go back and re-read his comment. Also, as I have said repeatedly, removing the BFO statistic does not change the outcome, so your criticism is irrelevant.
Regarding #3, yes, as we have said repeatedly, 34.3S has been searched out to 25 NM. Too bad you did not follow Ocean Infinity’s search for ARA San Juan. You would have learned something useful. No matter how good the equipment, mistakes occur wherein the debris field may be missed. People are in the classification loop, and in some places the terrain is difficult. No unsuccessful sea bottom search is 100% effective, only the successful ones are. In addition, the aircraft could be outside the previously searched area.
@Victor. Thanks.
From our extensive earlier discussions about the gap between simulation results and the descents derived from the final BFOs, my own take is that while a pilot initiated final dive would bridge that, simulation shortfalls just might explain it.
@DrB. Thanks for correcting my misunderstanding that the modelling supposed the aircraft to be unpiloted.
@DrB
I believe you noted that there could be several flight path solutions by which an active pilot could meet all of the Arc/BTO/BFO constraints and the aircraft would cross Arc 7 at 00:19 at 24 S with fuel depleted. This is a much more complex problem than finding the best fit A/P modes, so I appreciate the focus on no active pilot. That does not mean that there was no active pilot – that would be another case which you dismiss as not very likely.
Maybe Z programmed the A/P to fly to the South Pole. But he would know that Boeing could assume that and the endurance problem and range problem are merged. Without any consideration of SATCOM arcs, you could estimate the fuel depletion location on the route. It’s great that this also matches the BFO/BTO data. So that supports that the aircraft may have actually done it.
But Z would know this and would know that by flying on a different course and intentionally making an occasional clearing turns or S-turns he could burn off an hour of fuel without making forward progress. It makes sense to not use direct 180 – the arc orientation would suggest any feasible solution with delays needed to be more southeast. But he would not know about arcs, so the magic path through the arcs would just be a lucky accident.
So does Z set it up for the South Pole and enjoy the ride with no consideration of post crash simulations or does he intentionally mess with the range-endurance modelling? If the plane is at 34.3 S he went for the ride. If the plane is above 25 S he is messing with everyone.
@All
I have run 14 MH370 flight paths with active pilot inputs and posted the results on Victor’s website in either the current post or the previous post.
These flight paths with active pilot inputs have been proposed by @TBill, @Nederland, @Niels and @Hank.
Only Niels Case C came within the tolerances set for a ROI, but this case only starts at 21:11:02 UTC and is not a full simulation from before 19:41:03UTC.
Before anybody starts criticising a LNAV 180 LRC FL390 path without an active pilot, because there are obviously better flight paths with an active pilot, they should please describe such a flight path. I need only start time, start lat/lon, initial bearing, flight level, navigation mode, speed mode and the time(s) of any bearing, flight level, navigation mode or speed mode change.
So far, a LNAV 180 LRC FL390 flight path is unique.
@Richard
Right now I am not convinced of passive flight, but I am not going to put up any more argument here. I would rather search your area, since you could be correct, than my area, since I could be wrong. And I would feel bad if I caused the search to miss an opportunity. If your recommednation comes up empty, I got a back-up proposal where it went, and other people have other unrequited hunches such as Ed Baker for example.
OK I may still put up some argument. But I have been relatively quiet letting IG take the lead since late March. That’s when Don hit me pretty hard on Reddit for suggesting a 20-25 South search area – I immediately asked Victor if there was change in the thinking and Victor said yes that was the new trend.
@Hank It is of course very difficult to get into someone’s head – especially someone who would do this. And, we are not certain who’s head to get into.
Nevertheless, the analytical approach has not produced any wreckage and any new ‘hotspots’ that may be derived analytically would be strengthened if supported by some ‘motivational rationale’. So, this is my attempt get into someone’s head.
I cannot recall an instance where an aircraft crashed into the sea, a timely search was initiated and the wreckage was found on the bottom without first finding a floating debris field and/or the 37.5 KHz pinger signal.
In the MH370 case neither of those has been located. The reasoning could have been that if those indicators are hidden, the wreckage would not be found. Indeed, if neither of those indicators could be found, the reasoning could have been that a sea bottom search would not be conducted. Of course, it was conducted – but it surprised many that it was – and it was not successful.
Perhaps the best way to hide these indicators is to crash into the sea as far as possible from an operational search base. It seems to me that the latest ‘hotspot’ (LNAV 180 LRC FL390) can be ‘explained’ on a motivational basis and has analytical integrity.
As always, this makes for engaging reading.
I’m beginning to suspect more and more the final resting site has been scanned but missed.
@Richard
So far, a LNAV 180 LRC FL390 flight path is unique.
I disagree. There are many possible paths satisfying the Inmarsat data. As I have said several time before, the Inmarsat data cannot be used to determine a terminus. We have seen that movie many times, and it is yet to have a happy ending.
@DennisW
It does help that you disagree, without providing evidence as to why.
To simply state there are many flight paths that satisfy the Inmarsat data, is cheap and insulting. It shows you have not bothered to read our paper or recent comments on Victor’s website:
(1) Our current study is not just reliant on the Inmarsat data. We are also looking at the aircraft performance, engine performance and weather data in detail.
(2) You fail to provide any alternative flight paths, despite my challenge to the MH370 community to nominate such paths. To repeat, I need only start time, start lat/lon, initial bearing, flight level, navigation mode, speed mode and the time(s) of any bearing, flight level, navigation mode or speed mode change.
@Richard
The original work done by the IG is valid, IMO. Victor’s path to the Cocos works for me as well. Your characterization of BFO errors simply does not stand up to either the previous data in the DSTG book or the industry standard math used to characterize oscillator performance. Your definition of “unique” relies on your interpretation of the data and the statistics governing that data.
As far a navigation mode is concerned, it is possible that inputs from an active pilot make that question irrelevant.
It would be extremely useful to have the equivalent of the DSTG book figure 5.4 for several other previous flights. The largest component BFO error is due to the random walk of the AES oscillator, and it simply cannot be characterized by mean and standard variance.
@DennisW said: It would be extremely useful to have the equivalent of the DSTG book figure 5.4 for several other previous flights.
Agreed, especially if the other flights showed evidence of drift of the fixed frequency bias.
The largest component BFO error is due to the random walk of the AES oscillator, and it simply cannot be characterized by mean and standard variance.
If the first part of the statement is true, so is the second. I don’t think we can be sure of the first part.
Bobby believes that we might be able to ignore the BFO statistics and arrive at the same unique path. That would be progress because it renders assumptions about the bias drift to be moot.
DrB: “My opinion is that the chances that any actual route with significant maneuvers after 19:41 would have a unique solution assuming no maneuvers is extremely low.”
Is there any way to determine or at least estimate/approximate mathematically this probability?
Prima facie the probability indeed seems low.
But doesn’t the fact that the amount of possible paths is infinite make it less improbable than it appears at first glance? (The more paths, the likelier they are to include a random match by chance, no? So if you have infinite path candidates … ?).
@Peter Norton,
You said: “Is there any way to determine or at least estimate/approximate mathematically this probability?”, referring to ” the chances that any actual route with significant maneuvers after 19:41 would have a unique solution assuming no maneuvers”.
The only way I can see to do this would be to create a number of artificial data sets from assumed routes with maneuvers. Then one can search a data set for a matching route without maneuvers. The problem is, it takes weeks to months to do a good search of a single trial set of satellite data, looking for a route with no maneuvers. Then one would have to repeat this many times, leading to many years of effort (using PCs). Even then, some might say you just didn’t pick the right route with maneuvers. So, from a practical point of view, I don’t see how to predict this probability with any useful degree of certainty.
Here’s one way to look at it. If one takes a data set generated by a route with no maneuvers, one can always replicate that data set using a route with multiple maneuvers. But the reverse is not universally true. For instance, I can easily generate a route with maneuvers which cannot be replicated by a route with no maneuvers. All you have to do is throw in a HOLD, a large speed change, or a significant turn. In other words, a data set from a route with no maneuvers can be matched by a route with maneuvers, but most routes with maneuvers cannot be matched by a route with no maneuvers.
@DrB: thank you for the kind explanation
Ok, given that it seems next to impossible to determine this probability mathematically, how would you estimate this probability (of a coincidental match) is? What percentage?
I understand that the question is both subjective and hard to answer, but what is your educated guess based on your experience (all your excellent work on this subject so far) ?
@Shadynuk
I believe that Captain Zaharie (Z) hijacked his own aircraft and flew it to a point on Arc 2 west of Sumatra at 19:41. It is clearly possible that Z programmed the autopilot to fly LNAV 180 LRC FL390 and then disengaged. I have no issue with the great work done by DrB, Richard, and Victor.
But Z is a very experienced aviator and understands that flying a long straight path until fuel depletion merges the endurance and range problems. If investigators assume a direct flight to the south pole the aircraft would run out of fuel at a predictable point in simulations.
A much less sophisticated simulation than the one performed here could define a search zone with no use of the SATCOM data if you assume LNAV 180.
If Z wanted to mess with the ability to perform these fixed course simulation he would burn fuel and not make any forward progress by performing a hold or just some S-turns. If he delays by holding for one hour at cruise Mach between 19:41 and 00:11 (4:30) he takes 500 or so miles out of the range.
He could have done this on a 180 path, but that would have not matched any of the Arc parameters. If Z performed holding he would have had to have flown a more southeast route.
The issue is why did Z program the autopilot for LNAV 180 LRC FL390 or did he mess with post incident simulations by intentionally engaging in some delay tactics? If he did delay he had no knowledge of arcs and pings and it would need to be a magic sequence of turns. But there are infinite ways for an active pilot to delay and meet all of the SATCOM constraints, but there is no question that the delays would move the Arc 7 crossing to the north from the 34.4 perfect course.
@Peter Norton: You are really asking for a proof of Occam’s Razor. Here’s an interesting analysis that attempts to show that more complex solutions have lower probability:
https://www.lesswrong.com/posts/jBnX58P8J6HuTCz2g/a-proof-of-occam-s-razor
In the DSTG study, they reported a histogram of the number of turns in the posterior distribution (Fig 10.4). It’s quite evident that as the number of turns increases, there is a much lower frequency of paths satisfying the BTO and BFO criteria.
@Richard
I have no reason to criticize your work. It is very well done and it could have been exactly what Z programmed.
You said” – Before anybody starts criticising a LNAV 180 LRC FL390 path without an active pilot, because there are obviously better flight paths with an active pilot, they should please describe such a flight path.
I don’t have the tools to perform this analysis at home. If I did, I would try to back fit one feasible active path to at least show that it is possible.
I would place the aircraft on Arc 7 at 00:19 at 24.0 S and set the parameters to exactly fit the SATCOM data. I would connect the Arc 7 24.0 S intercept with an assumed start position on Arc 2 at 19:41 to define a nominal great circle route. I would define the approximate time delay needed to fly between Arc 2 and Arc 6 over 4:30 hours at a cruise Mach that is consistent with the SATCOM data. I would apportion the delay between the three 1:00 hour 2-3, 3-4, and 4-5 segments and the one 1:30 5-6 segment. The aircraft arc crossing angle could vary based on whether the aircraft is engaged in an S-turn so the exact crossing angle can vary from a straight arc crossing on the reference course. It may be necessary to shift delay time between the zones to best fit the data.
Z is could not be gaming the system in a sophisticated way because he would not know about the arcs. But there are infinite maneuver possibilities. So simple flight maneuvers are better. There could be a long circle in one spot with S-turns in other areas.
If it is feasible to create ONE feasible flight path to 24S, it should be feasible to create ONE to 23.5S, etc.
I think Z is smart enough to mess with any post-incident range-endurance simulations and he would not have flown a straight course.
But it is certainly fair to believe he programmed the LNAV 180 and disengaged.
@Hank The fact that you (and like others) do not believe that ‘he’ would have flown a straight course may be the very reason that he would fly a straight course.
In any case, if you can conceal the floating debris and the 37.5 KHz pinger signal, you certainly make life a lot more difficult for the searchers. However, realistically, I have no idea where this wreckage could be. I continue to count the number of assumptions necessary to produce an unambiguous analytical solution – there are a lot of them.
@Hank
RE: “Z is could not be gaming the system in a sophisticated way because he would not know about the arcs. “
I think the question that needs to be asked is, having essentially ‘disappeared’ early in the flight, would the perpetrator feel any need to further ‘game’ the system? He might reasonably have suspected the aircraft could still be tracked by primary radar after it turned back and headed up the Strait of Malacca, but he would have known the aircraft would eventually be ‘lost’ once it left radar coverage. From his perspective, nobody would have had a clue where the aircraft went after that point. It might have continued on the same track, or it might have turned, but where and in what direction? From that point on he must have felt ‘safe’ from detection, so why would he feel the need to cause further obfuscation?
re: passive flight path + active EOF (“push down”)
The above combination/contradiction could also be used to substantiate the hypothesis of an interchange [if not entirely impossible]: a passive flight ‘simulation’, no fuel exhaustion, a fake dive, no crash, and so on ( – just in case only! ) …
[But still hope it is not another ‘ether’ story. ]
@Hank: Even if we somehow “knew” that the pilot followed a due south course, we would still need the satellite data to find the plane: we wouldn’t know the longitude because we wouldn’t know at point flying northwest the turn to the south occurred, and we couldn’t use the fuel models to predict the latitude because a crash site near 34.3S latitude requires a loiter or excursion before 19:41, and we wouldn’t know the extent of the delay. Without the satellite data, it would be almost impossible to guess where to search.
@Tom O’Flaherty: Welcome to the blog.
@Hank, @Andrew
I agree that once he had escaped the range of any possible “land based radar threat” he could quite easily just set a straight course direct to wherever he intended to go.
But, if we assume his imperative was to “vanish”, then any “chance sighting” by anyone else, by even one, possibly, but definately if by two or more, at any point(s) in time, those sightings would (on later analysis) give his track line. If your intention is to vanish, it is a poor strategy to set a straight course for five hours plus.
During the hours of darkness, such chance sightings ( by military ships with air search radars, or military patrol aircraft eg P3, Awacks, Hawkeye etc ) would be vanishingly slim, and thus the strategy is acceptable. But during daylight, it is definately a very risky strategy, and not acceptable, in my view. Visual detection in daylight, by other aircraft and/or vessels, would be way too easy, particularly if he was making contrails, and indeed, suspicious contrails would also show up in weather satellite images during daylight.
This is the biggest issue I have with the northern end points on the arc, since he would have been in daylight for well over an hour, a fact, apparently ignored by most. This is the main reason why I hold to the “stay in the dark” and ditch at dawn as far south as possible strategy, i.e. (~~38S~~).
But, if you accept northern terminuses, there are multiple possible piloted soultions, including Hank’s strategy.
@Peter Norton,
You asked: “Ok, given that it seems next to impossible to determine this probability mathematically, how would you estimate this probability (of a coincidental match) is? What percentage?”
I can’t put a number on it, but in my opinion it is very low.
I can tell you roughly what percentage of possible combinations of the 7 route parameters happen to match the satellite data. Here are the rough numbers:
To make it simple, let’s start the route at 19:41, so we don’t have to guess a start time. Then we have to guess the start latitude and start longitude over a region that is roughly 10 degrees in latitude and 5 degrees in longitude. To fit the data at all, one has to be within less than 1/2 degree, so that is roughly (at least) 200 possibilities. Next I have to guess the flight level, so let’s assume it could be every 500 foot interval from FL340 to FL410. That’s 15 choices. Then I need to pick a speed. Obvious choices are ECON with CI=52, MRC, LRC, M0.84, M0.83, M0.82, Holding, and 250 KCAS. That’s 8 choices. Next is lateral navigation method. Choices are LNAV, CTT, CMT, CTH, and CMH. That’s 5 choices. Finally, one must specify the initial bearing. To get any kind of a fit, one needs to be closer than 1/2 degree over a potential range of roughly 155 to 192 degrees. That’s about 75 possibilities.
So, a very crude minimal number of “no maneuvers” routes is 200 x 15 x 8 x 5 x 75 = 9 x 10^6. So, that one unique route that matches the satellite data is one out of 9 million “no maneuvers” possibilities. So, if you want to assume the actual route had maneuvers, you must then believe that only one in 9 million “no maneuvers” routes also coincidentally matches the data. What is the probability of that happening by random chance? One in 9 million? Actually it is much lower than that, because many routes with maneuvers have zero “no maneuvers” solutions.
To summarize, if you assume the actual route had maneuvers, then it must have been one of a very small subset that also has a “no-maneuvers” solution, and furthermore that solution is unique out of roughly 9 million possibilities. The only way to “prove” that maneuvers occurred is to demonstrate that there is no route among the 9 million “no maneuvers” which matches the data. But here we do have one solution, so we can’t “prove” maneuvers occurred, nor can we “prove” that no maneuvers occurred (from the satellite data).
The alternative hypothesis is that the actual route had no maneuvers. Furthermore, in this case we know only a single route was flown, and therefore there should be a single “no maneuvers” solution, which there is. This is the simplest hypothesis consistent with the observables and therefore it is also the most likely.
@ventus45
Those with proposed locations (pins) north of 25 South are fighting some ‘headwinds’:
(1) Drift analysis of both Chari Pattiaratchi and David Griffin. Both influential oceanographers apparently favor high twenties to mid thirties as a crash location (as Blaine has pointed out).
(2) Possible harder to search – too deep in some places
(3) Violation of the Sunlight Avoidance hypothesis, poplular for some (Aussies) is the theory that the pilot might have designed the flight path to stay out of sunlight at sunrise, by going west.
(4) Violation of the Passive Flight assumption popular for many
(5) Violation of the Submarine Rule-of-Thumb, the striking success that Ocean Infinity apparently found the missing Argentine Sub in an area already searched implies the MH370 crash location is in an area already serached, but was missed
So that’s why 20-25 South idea died among influential investigators.
I am not saying those reasons above are valid, I am only saying they are popular and influential. I am also not giving the rebuttal of the nothern pin holders, who tend to be the active pilot believers.
@DrB: I think what would be persuasive is to show that using objective criteria, there is only one passive route that is acceptable, and that one route has a very sharp peak in the objective function. The challenge is to demonstrate that the criteria truly is objective, i.e., the criteria were not chosen in a way that biases a particular result, and that there are no other sharp peaks in the objective function. The latter is hard to prove because sharp peaks are hard to find using a search methodology. I think the current works makes progress on all fronts.
@DrB
To make it simple, let’s start the route at 19:41, so we don’t have to guess a start time. Then we have to guess the start latitude and start longitude over a region that is roughly 10 degrees in latitude and 5 degrees in longitude. To fit the data at all, one has to be within less than 1/2 degree, so that is roughly (at least) 200 possibilities. Next I have to guess the flight level, so let’s assume it could be every 500 foot interval from FL340 to FL410. That’s 15 choices. Then I need to pick a speed. Obvious choices are ECON with CI=52, MRC, LRC, M0.84, M0.83, M0.82, Holding, and 250 KCAS. That’s 8 choices. Next is lateral navigation method. Choices are LNAV, CTT, CMT, CTH, and CMH. That’s 5 choices. Finally, one must specify the initial bearing. To get any kind of a fit, one needs to be closer than 1/2 degree over a potential range of roughly 155 to 192 degrees. That’s about 75 possibilities.
At 19:41 the aircraft lat and lon are not independent but coupled by the requirement to be on the 19:41 arc. That reduces your factor of 200 to 20.
Likewise speed and track angle are tightly coupled. Once you pick a track angle the speed required to meet the BTO at 20:41 is determined. I prefer to think of track angle as simply a test case place holder, and not something you would include in the route probability.
Altitude is not an independent variable either, depending on the lateral navigation mode.
I would assign the number of “no manuever” routes to be closer to 10,000 than 9 million.
@TBill
Your list of “headwinds” is equally troubling. I can make no sense of 2> through 5> at all.
@DennisW
Item-2 is conjecture from me, I am thinking there are some areas 19000-feet or deeper on Arc7 that could be hard to seacrh (at 20-25 South +-25 nm)
Items 3-5 are I think clear, (3) ventus is saying he and others do not buy 20-25 South because the pilot would have been in sunlight for an hour, (4) Passive flight paths end somewhere around 26 South and…
(5) is a big new thing. Originally we were hearing the prior search was 9x% effective…so we thought looking 20-25 South made sense…now we are hearing it is considered more likely the crash site was missed than being elsewhere
@Victor. I second your sentiments regarding “objective function” and distinct probability peak expressed above. I look forward to seeing a fuller write up of the results and interpretation in due course. If (and it’s a big if) I can follow the stats, perhaps I could be persuaded of the ability of this technique to unearth the “one true course”. As of now I remain skeptical and I continue to be amazed that it is considered possible to extract objective “truth” from among all of that noise.
@Victor, @DrB:
If in the end you can find the only one acceptable route through this technique, that’ll be a huge achievement. I’m really looking forward to your upcoming paper.
The French investigators seem to be coming to the same conclusions as the rest of us:
http://www.leparisien.fr/faits-divers/vol-mh370-revelations-sur-le-crash-mystere-10-07-2019-8114283.php
They visited Boeing and left with the satellite data. They expect it will take a year to analyze the data. (Considering that the unredacted data sets for MH370 and MH371 have been in the public domain for over two years, and people have been analyzing the data from MH370 for the last five years, I’d say it is too little too late.)
@TBill
For the sake of covering all bases, I am going to abandon my 38S point (for now), and stick my neck out a bit and make the case for the “totally dark” scenario.
Consider this.
Mission Day was set by Anwar’s court appearance date, which was known by all and sundry, months in advance.
Z knew (as did everyone else) that Anwar would be sent back to gaol.
Z had long since made up his mind to “immediately” hit back at this legal and political corruption.
Z had long since decided on vanishing in the SIO, and he had contingency plans ready.
All that was needed was confirmation of the court date, the verdict (which was a foregone conclusion), and his actual next long haul flight after that.
Z knew, weeks before, when his roster came out, that he would have MH370 on mission day.
Thus, he had plenty of time to finalise his true flight plan (which we don’t know – yet) and to generate the sim clues.
He wanted the Malaysian Government to know (secretly – well after the event) that it was him and that it was deliberate.
Z knew that sooner or later, the Malaysian Government would seize and examine his simulator.
So he decided to hide his clues there.
But, he did not want to make it easy for them.
We now know how he did that, by recording the flight on a separate drive, and then amateurishly deleting it, deliberately, full well knowing that it could be recovered by computer experts.
The cryptic clues that Z provided the Malaysian Government (and later us) are contained in plain sight, in the simulator “dragged” end of flight positions S1/S2 (45S104E). The early points in the sim are not relevant to the end game.
What is significant to the end game are only the end points S1/S2.
Z was a very smart cookie, and no doubt very well versed in matters navigational and astronomical.
Z gave 45 South as a freebie, (otherwise no one would ever work it out).
Z’s determined end of flight latitude is therefore 45S.
That part is both simple and obvious, even to a corrupt government, with a corrupt police and judiciary.
But where was he going exactly, what longitude ?
Be patient.
Once his roster came out, and he knew he had MH370, he knew that he would need a little extra fuel than was normal for MH370 to actually get to 45S.
He knew then, that on the night, he would have to conger up a credible looking normal pretext to load that extra fuel that he would need to get to 45S.
That is why he was a bit early for the flight, and had the fuel signed off, even before Hamid clocked on.
We know all about that extra fuel now, and he knew that we would, eventually.
Now, to the flight itself. Z knew, that to remain hidden from visual detection, he had to stay in “the dark”. Keep that thought in mind.
You must remember that there are two positions S1/S2.
Both are significant.
S1 is at cruise altitude.
S2 is virtually at sea level (for all practical purposes).
He deliberately “dived” the sim from top to bottom, to figuratively say, “this marks the spot”.
So, what does this tell us about “the spot” ?
Let us recap. What do we know at this point ?
(1) The time of end of flight for mission day, is obviously defined by fuel exhaustion, planned to be at about 00:00 UTC.
(2) The intended latitude we know, which is 45S.
What we don’t know, is the longitude.
But in point of fact we actually do.
It is in plain sight, if you blink, twice, perhaps thrice.
To divine the clue, you must think like a navigator, or better yet, an astronomer.
You must remember that:-
(a) daybreak, i.e. sunrise, is defined as when the sun is on th horizon, ie, zero degrees to the horizon.
(b) civil twilight is defined as beginning when the sun is 6 degrees below the horizon.
(c) nautical twilight is defined as beginning when the sun is 12 degrees below the horizon.
(d) astronomical twilight is defined as beginning when the sun is 18 degrees below the horizon.
Now the longitude for sunrise at 45S at 00:00 UTC on mission day the 8th of March 2014 is quite easy to calculate. It is 86.367E.
But Z did not want to tell us outright that he was planning on going to 86.367E at 45.000S at 00:00UTC.
He was sneaky, an evil genius, and he had a sense of humour.
He was entering the twilight zone, but not just any old ordinary twilight zone mind.
He was entering a very special, a very specific twilight zone, to “vanish” with “no light”, so to speak.
He did not want civil twilight, with its glow of pre dawn light, nor did he want a nautical twilight, with it’s very faint glow of light.
No, he was heading to the absolute boundary line between “fully dark” and light of any kind, specifically, “to the limit of night”, i.e. to the beginning of astronomical twilight.
Now, astronomical twilight at 00:00 UTC at 45S on the 8th of March 2014 would be 18 degrees west of 86.367E, i.e. at 68.367E.
But, that was no good as “a clue” for a number of reasons.
Firstly, it would be dismissed by all analysts simply because:-
(a) it was way too far for the fuel available, and,
(b) it was way too far for the performance limited range in the time available.
So, what did he do ?
He had to pick a point that was theoretically reachable from Penang, and thus credible.
Penang direct to 45S 86.367E is just under 3,100 Nm
Penang direct to S1/S2 is just over 3,000 Nm, virtually the same distance, slightly less actually, and thus both achievable and credible.
So, he simply dragged his simulator to 18 degrees east of his end latitude, i.e. to what should have been precisely 104.367E for S2.
If all had have gone according to plan, theoretically, he would have reached 45S 86.367E at 00:00 UTC.
In doing so, he would have crossed the now known 7th arc, heading 187.025 true, not at 00:19, but at 23:26 UTC.
But that didn’t occur.
In the event, he was going to be about 53 minutes late, and he was going to come up a bit short on range, though he had got the fuel endurance almost spot on to within 10 to 20 minutes.
So, what does he do ?
His imperative remember, is to “stay in the dark”.
Precisely where he actually ends up does not matter.
Knowing that he would be late on his plan by the time he crossed the equator (an obvious check point) forced him to recalculate, and head further west to remain in the dark.
Thus, there must be another slight turn somewhere, probably after he had reached about 20S and had a better handle on GS made good.
For an estimated extra 20 minutes flight time, to his now re-estimated 00:20 flame out, and since the earth is rotating, he needs to end up at 00:20 UTC a further 5 degrees west of his originally intended track line.
From 20s90E to 45S 86.367E he would have (in the original plan) been heading about 185.8 true.
He now has to head from about 20S90E to a recalculated position on the 86.367 – 5 = 81.367E meridian, that is reachable in the time available, and with the fuel remaining.
That requires a slight turn, to about 197.5 true, and produces an intersection with the 7th arc at about 41S at 00:20 UTC.
Thus, 41S 81.367E is the maximum south westerly position on the 7th arc that he could have reached.
That is where to look next, around 41S, and if not found there, backtrack along the 7th arc from 41S to 38S.
V45
@ventus45
I agree with you philosphically, the only real flight path clue we have from ZS is the sim study. Maybe the @Freddie/Xmas rumor as an alternate flight path hint from ZS, but unlcear on the latter.
I (and Victor) have asked readers here: what end point do we think the sim study suggests? What was the purpose of the run? You have certainly provided a counter-proposal, we’ll have to weigh it. My proposal is he flew the actual route on the simulator and the goal was Broken Ridge or Dordretch Hole. Believe the latter is a good match to BTO/BFO as active flight, merging onto the sim path at around BEBIM.
@Ventus45
RE: “We know all about that extra fuel now…”
People keep claiming that ‘extra fuel’ was loaded. Would you care to explain why you think the fuel load was more than what was required for the flight that night?
@ventus45
Re: ‘We know all about that extra fuel now‘
Yes, we do and there was no extra fuel.
I don’t know how this nonsense still gets a run. It has been demonstrated on multiple occasions in multiple forums that the fuel load was the minimum amount required to meet regulatory and company requirements.
@Andrew
Simply, the fact that as I remember it, the planned alternates in the final amended flight plan were judged (by others long ago) to be much further from Beijing than other alternates that were considered to be more normally used, and were supposedly acceptable (weather wise) on the night, and thus, he took more fuel for those “further” alternates. I am assuming that he contrived to select those further away alternates as a ruse to justify the extra fuel he needed to be able to get to 45S.
I feel like we are missing fuel history comparison to all other MH370 flights, so as usual we are outta ammo.
@TBill
Other airlines also fly 777’s between KL and Beijing.
Any flight plans with alternate details from any of them would be useful, then or now.
@ventus45
@TBill
I’ll explain the selection of the alternate as it has been explained to me. The short version is that it is pointless selecting an alternate that you can’t land at.
The long version is that the choice of the alternate was dictated by the weather. The TAF for Tianjin (ZBTJ) had a TEMPO for visibility of 1400m in light snow and rain. The TAF for Jinan (ZSJN) was relatively clear.
The MAS Ops Manual (Part A) para 8.1.3.6.2 states:
An adequate aerodrome is suitable to be used as destination alternate, 3% ERA or destination aerodrome when isolated, if the weather reports or forecasts indicate that, during a period commencing 1 hour before and ending 1 hour after the estimated time of arrival at the aerodrome, the weather conditions will be at or above the planning minima.
In this case, the expected type of approach was a Cat 1 ILS, so the applicable planning minima for MAS Ops would have been the non-precision approach minima. The only non-precision approach available at ZBTJ is a VOR, which requires a minimum visibility of 1700 m for the approach to Rwy 34L. According to the MAS rules, the TEMPO visibility of 1400 m made ZBTJ unsuitable as a destination alternate, hence the selection of Jinan (ZSJN).
@Victor Iannello
Regarding the article in Le Parisien:
I found the following paragraph especially interesting, in the light of ongoing discussions on pilot inputs or not after 19:41. Not sure what to think of it / what is behind it:
“Selon nos informations, le déplacement aux États-Unis a permis de révéler que le MH370 a été piloté jusqu’au bout. Les données fournies par le géant américain accréditent une piste suivie discrètement par les gendarmes français : à savoir, il y avait quelqu’un derrière le manche lorsque l’avion s’est abîmé dans l’Océan indien.« Les juges nous ont indiqué que rien ne permet de dire que le pilote est impliqué », prévient Me Marie Dosé.”
@Ventus45
RE: “…the fact that as I remember it, the planned alternates in the final amended flight plan were judged (by others long ago) to be much further from Beijing than other alternates that were considered to be more normally used, and were supposedly acceptable (weather wise) on the night, and thus, he took more fuel for those “further” alternates.”
Here’s why I think claims of ‘extra’ fuel are wrong:
The two alternates for ZBAA (Beijing) that were nominated on the ATC filed flight plan were ZBTJ (Tianjin) and ZBSJ (Shijiazhuang). The ATC flight plan was filed about 12 hours before the flight’s ETD. The Operational Flight Plan (OFP – the document used by the pilots) that was issued 90 minutes before departure nominated a single alternate, ZSJN (Jinan), which, as you said, is further away from ZBAA than ZBTJ or ZBSJ.
At the time the ATC plan was filed, the forecasts for ZBTJ and ZBSJ showed they were both suitable to be nominated as alternates. However, as Mick outlined above, the later forecast for ZBTJ that was issued at 070930Z had a TEMPO for visibility of 1400m in light snow and rain, which is below the required planning minima, making it unsuitable to be nominated as an alternate. The forecast for ZBSJ that was issued at 070705Z had similar conditions to the earlier forecast, however, the METARS show that the actual visibility was as low as 1800m during the day, which is only just above the required minima. In my view, it was sensible for the MAS dispatcher and/or aircraft commander to select another alternate with a better forecast.
I should also note that the MAS operations manual lists the following as alternates for ZBAA: ZBTJ, ZSSS (Shanghai) and ZSPD (Shanghai-Pudong). ZSSS and ZSPD are significantly further away from ZBAA than ZSJN, so the choice of ZSJN as the alternate actually resulted in MH370 carrying less fuel than it might have done.
@Mick Gilbert
RE: “The only non-precision approach available at ZBTJ is a VOR…”
The LOC/DME approaches are also non-precision approaches! Nevertheless, the TEMPO was also below the required visibility for those approaches.
@Ventus45
Further to my comments above, the following map shows the relative positions of the alternate airfields in relation to Beijing:
http://www.gcmap.com/mapui?P=ZBAA-ZSJNZBAA-ZSPDZBAA-ZBTJZBAA-ZBSJ&MS=wls&DU=nm
@Niels: Yes, I also saw that paragraph. I don’t know what to think of it. Are they implying there were pilot inputs before and after fuel exhaustion? My guess is they are leaning heavily on the French analysis of the flaperon, which suggested that the flaperon was damaged as it was dragged along the water, and not so much on the ATSB’s evaluation of the flap, which the ATSB believe was retracted.
Some of the characters were dropped from the URL I pasted above. Try the following link:
ZBAA Alternates
@Andrew said: so the choice of ZSJN as the alternate actually resulted in MH370 carrying less fuel than it might have done.
That’s a great point that I hadn’t seen before. If the intention was to carry extra fuel, the captain could have easily justified more fuel by designating an airport further from ZBAA as the alternate.
@Victor
Thanks, but on reflection it possibly wasn’t such a great point after all. A captain would have a hard time trying to justify an alternate so far away from the destination unless the destination weather was so bad that a diversion was likely. In such cases it would be preferable to divert to an ‘online’ port where the airline’s own ground staff would be available to deal with the passengers. In this case, however, the weather at Beijing was pretty good, so a closer alternate would be more reasonable because the likelihood of a diversion was low. Nevertheless, I think the map I posted clearly shows that ZSJN isn’t a whole lot further away from Beijing than ZBSJ.
@Andrew
Re: fuel
I agree if there was extra fuel it was just a small amount extra. Obviously the pilot’s job is to add a little extra fuel to get to alternate airport, and my understanding for China you want a little margin over the normal amount extra fuel. As a conservative engineer I can appreciate that is exactly what I would do too.
Therefore we have “no leg to stand on” re: extra fuel, although Malaysia could prove that by giving us other MH370 flight fuel loads. My concern is actually that we are not getting any fuel quality data (density etc), which I think could indicate Malaysia knew MH370 was still flying so fuel was not the issue. But normally fuel check is made, is my understanding. MAS COO Dunleavy said they assunmed the flight was still flying, so I do not know if they interpreted the SATCOM sat calls as a live plane, but sounds like they had a clue.
Guess we might have MH371 fuel load on the in-bound but that does not help much I don’t think.
@Victor
That was a good article from France.
I wanted to know what type of engineer is Ghislain Wattrelos?
A number of serious discussion points, but I liked where it said we have no info to place ZS as the pilot. In other words, what I would say, nothing about the design of the aircraft captures the identity of the pilot, except the voice data recorder maybe, but that is on 2-hr loop and can be manipulated (as per your write up on JW some years ago). So even if we find the data black box, which could be emnpty, which if so would be further circumstantial evidence of tampering, we never have “proof” of ZS.
I feel in America we have the Duck Rule, if it quacks like a duck etc. but that rule does not hold up in all cultures, is my thought.
@TBill
Fuel planning is a fairly rigorous exercise. The fuel analysis in MH370’s OFP clearly shows the aircraft was not carrying any more fuel than was required by law or the company’s own fuel policy. The only bone of contention is the choice of alternate, but I hope I have shown that ZSJN was justified given the forecast and actual conditions at the closer alternates.
Every flight is different, so I’m not sure that other MH370 fuel loads would prove anything. In most cases you would probably find that other Beijing flights held ZBTJ or ZBSJ as the alternate, simply because they are the alternates that are regularly nominated for Beijing in suitable weather conditions. In some cases, however, you would find that a more distant alternate was nominated, due to the conditions at Beijing or the close-in alternates.
@VictorI
You wrote:” My guess is they are leaning heavily on the French analysis of the flaperon, which suggested that the flaperon was damaged as it was dragged along the water, and not so much on the ATSB’s evaluation of the flap, which the ATSB believe was retracted.”
Yes, possibly. Though the article imo suggests that Boeing provided information that “accredited” the investigative track / hypothesis followed by the French (that someone was at the controls when the aircraft crashed into the SIO)
@Niels
I have worked in France for a number of years. The French authorities only take evidence from French sources.
The ATSB analysis of the Flaperon is therefore automatically discredited.
The statement from the French newspaper article is made without any evidence: “The data provided by the American giant substantiates a track discreetly followed by the French gendarmes: namely, there was someone behind the control column when the plane crashed into the Indian Ocean.”
In my view, Victor is correct, when he says “My guess is they are leaning heavily on the French analysis of the flaperon”.
@Niels: I don’t put a lot of weight on a statement like that. I’d be very surprised if Boeing today believes the plane was piloted to the end. My guess is that Boeing provided data, and the French investigators interpreted that data in a way that supported their theory. But without seeing the data, it’s hard to know.
I also wonder how current Boeing’s data and analyses are. My impression is that Boeing’s involvement ramped down in the first year after the disappearance.
@VictorI, Richard
I agree that without seeing the data / evidence we should be careful with attributing weight on such statement.
I may discuss with some of my good French contacts to get a better feel for their investigative “culture”.
@VictorI
I’m pondering about your impression that “Boeing’s involvement ramped down in the first year after the disappearance”. I had a similar impression, and it doesn’t feel well, to put it mildly.
@Richard
@TBill
In the flight path via BEBIM, I personally wouldn’t worry much about fuel. It is probably true enough that a level path would come up with a lot of fuel remaining.
However, my argument was that this flight path does make sense only when one also assume a wild (and unknown) change in altitude (a lot of fuel burned) during the turn around Sumatra.
https://www.docdroid.net/GvlrLaV/mh370-waypoint-30.pdf#page=7
@TBill
Re: ‘Guess we might have MH371 fuel load on the in-bound but that does not help much I don’t think.‘
Actually Bill, it possibly does help a bit. We know that if MH370 had landed in Beijing without touching any of its fuel reserves it would have had about 11,900 kg of fuel left in its tanks, comprised of:
Contingency fuel: 1,200 kg
Alternate fuel: 4,800 kg
Final reserve fuel: 2,900 kg
Company fuel: 3,000 kg
We know that MH371 had returned from Beijing and landed with 8,200 kg of fuel in its tanks. We know that a large part of the 3,700 kg difference would have been the 3,000 kg of company fuel required for Beijing.
We don’t know what the alternate for Kuala Lumpur was but I’m guessing that it was probably Penang. KL-Penang is about 20 nm shorter than Beijing-Jinan which would roughly account for the other 700 kg. So, you’re there or thereabouts.
@Andrew
Re: ‘The LOC/DME approaches are also non-precision approaches! Nevertheless, the TEMPO was also below the required visibility for those approaches.‘
Yes, noted, thank you.
@Nederland
Great! thank you for checking in.
@Mick
Thank you for that fuel analysis, makes sense.
@DennisW,
You said: “I would assign the number of “no manuever” routes to be closer to 10,000 than 9 million.”
My statement about the number of “no maneuver” routes being 9 x 10^6 should have emphasized that this was without considering the satellite data, which can then be applied to reduce the number of “no maneuver” routes which can lead to independent “Regions of Interest” (ROI).
Your estimate of the number of ROI is a bit low when you include the uncertainties in the 19:41 and 20:41 locations due to the BTO reading noise. At +/- 1 sigma this changes the speed by 8 knots and the bearing by a degree. Thus I would say that the speed setting, with an uncertainty of +/- 8 knots or more, requires 3 values to be investigated. This is just at one altitude, and other combinations of speed setting and flight level can match the observed ground speed, but not at the same endurance. So one needs to explore about 3 flight levels at each speed setting to see if any of them have the correct endurance. In addition, the winds vary with altitude, so the ground speed will vary even more than the air speed. I could quibble about the number of lat/lons, but whether it’s 20 or 30 is not important. I would estimate the number of ROIs to be about 1×10^5.
So, in summary, the number of independent MH370 routes is about 9×10^6, and the number of ROIs which are independent when applying the satellite data is about 1×10^5. So,if a route with major maneuvers was actually flown, its satellite data has to match only a single one out of 10^5 independent ROI with no maneuvers. That’s a pretty slim chance in my book, and especially so when the pilot did not know when the SDU communicated with the ground station, although he would probably know this during the phone calls if he was aware of them.
@DrB
OK, I understand. I was using the satellite data as a “prefilter” of candidate routes without actually doing any detailed BTO and BFO qualifications.
Your conclusion is valid in that a peak in the detailed stats would be very significant. Frankly, I had not even thought about your approach.
@Niels: To be honest, my main interest is if there are additional data sets that were supplied to the French that we don’t have.
@Victor
argh…one article says Ghislain Wattrelos still believes in his heart MH370 was a shootdown somewhere by someone
…recall last month I was pointing out to @haxi the one key China NoK believes it was mechanical issue since that NoK is not buying into the pilot has ability to shut off comms without an alert signal
@VictorI
Not entirely sure how to read your comment, however I would like to add
Regarding Boeing’s attitude: an unconditional, strong commitment by the aviation industry to clarifying this terrible mystery would imo be appropriate and important.
About the data supplied, the article says: “Grâce à la coopération de Boeing, les enquêteurs sont repartis avec une masse considérable d’informations à traiter, dont les données satellites de l’avion. « Un an de travail leur sera nécessaire »”
It doesn’t help much , but it suggests more than just the satellite data.
@Niels: I would bet that there is no material information in that pile of data that we don’t already have, and I would also bet that the satellite data comprises much of it what was provided. I’m also willing to bet that the satellite data is identical to the unredacted data that was shared with me.
VictorI
I have closely followed NoK Wattrelos’ comments these few years and he had maintained an attitude of scepticism towards US, UK, and Australia’s involvement. It was this which led him to hold the ‘shootdown over S.China sea’ theory. The latest developments suggest that he has discarded that theory and now has to look closely at the ‘crash in the SIO theory.’
The French word ‘abattu’ could be loosely translated as ‘brought down intentionally’ (as opposed to landed safely). The French have clearly rejected the pilot suicide theory, but are holding to the intentional diversion / ditching theory.
@CanisMR said: The French have clearly rejected the pilot suicide theory…
Why do you believe that?
@CMR
The French have clearly rejected the pilot suicide theory…
I don’t read that into the French remarks, however, the pilot suicide theory has been weak from the beginning. As has the mechanical and shoot down theories.
It is clear (to me) that MH370 was diverted for a reason related to the political situation in Malaysia. The Malaysian early response (even criticized by ICAO), is indicative of that.
@DennisW
I think that a piloted flight that ends with the death of the pilot could be considered to be a suicide or a the result of a mission. The result is the same for the pilot. But the thought given to hiding the aircraft at sea could be much higher for a mission with that specific objective. I have always believed ZS had a higher purpose and this would not have been a classic suicide. Maybe that is what some people mean by claiming this is not a suicide? Others use it to suggest a mechanical cause followed by a ghost flight (which could be reasonable) or a hijack to Kazakhstan.
@DrB
While one out of 9 X 10^6 autopilot mode options is very impressive, it is infinitely less than the infinite possible flight paths with an active pilot, which includes the LNAV 180 LRC where the pilot may have not done anything more. It is statistically meaningless to infer that any of the infinite flight path possibilities with active pilot would have less than 10^7 solutions. Infinite plus 9 x 10^6 is Infinite.
You have clearly demonstrated that for no active pilot you have identified the best autopilot settings. This improves on the DSTG particle filter (which also assumed no active pilot) and it is worth re-looking at the search data around 34.5 S.
@DennisW: It depends on your definition of suicide. I think you would agree that the captain was ultimately responsible for navigating the plane to the SIO, killing him, the crew, and the passengers, whether or not there was a preferred plan not taken in which everybody survived. Some would call that murder/suicide. I prefer to not use terminology like “suicide”, “murder”, and “controlled to the end” because the meanings are different to different people.
@VictorI
Independent of what exactly was obtained by the French:
Their progress indeed seems to be slow. However, I find it important that such party performs a relative independent investigation. To me it appears that more than Five Eyes have been closed on 7/8 March 2014 and several instances afterwards. How much progress has there really been made in the past years in understanding what happened? The “pilot suicide” story which recently gained momentum is based on little or no hard evidence. At best it is the result of excluding other possibilities. How can one exclude other possibilities if the process of collecting facts has been so merky and perhaps even selective? I’m afraid much more patience and persistence is needed for this case.
@Niels: By the time the French finish the investigation, it won’t matter. Based on what I’ve seen to date, I have little hope that anything they do will be helpful. Certainly, releasing bits of information without any underlying data just causes confusion.
I also disagree with your statement that theories based on a deliberate diversion by the captain has little or no hard evidence.
@Victor,
I agree. My reference is only to the intention of the diversion.
my effort at translation (with help from Google)
Flight MH370: revelations about the mystery crash
by Timothée Boutry, Jérémie Pham-Lê et Vincent Gautronneau
10 july 2019 à 21h45, modified 11 july 2019 à 08h13
It’s the biggest mystery in civil aviation. On the night of March 8, 2014, flight MH370 connecting Kuala Lumpur (Malaysia) to Beijing (China) disappeared from radar screens with 239 people on board. Despite an exhaustive search in the Indian Ocean, apart from some debris, the wreck of the Boeing 777 of Malaysia Airlines has never been found.
In July 2018, Malaysia’s international investigation team issued its final report stating that the investigation had failed to establish the true cause of the disappearance. Juridically, there is now only one country in the world to investigate this disaster: France. A judicial investigation conducted by two Parisian investigating judges is still ongoing.
The French justice system has jurisdictional authority because of the presence on board of the plane of three of its nationals. Ghyslain Wattrelos, a French engineer, lost his wife and two of his three children that night. This Wednesday, he was received at the Paris court with his lawyer Marie Dosé to review with the magistrates and investigators mobilized to solve this enigma. The meeting lasted more than two and a half hours, and which included some of his in-laws, and during which he was able to appreciate the collosal amount of work done. And it’s far from over.
French investigators visit Boeing
The investigation have made a real advance. Between May 22nd and 24th, the judges and investigators of the Gendarmerie Air Transport Research Section (SR GTA) were finally able to travel to the United States at Boeing Headquarters in Seattle. The visit, anticipated for more than a year and a half, had been repeatedly postponed, the aeronautics giant not showing any inclination to cooperate. On site, the French visitors had to sign a confidentiality agreement. In concrete terms, all the data collected have been placed under seal and can not be added to the file. On the other hand, the investigators will be able to make use of them in writing their reports. Which will satisfy the civil parties. “The judges have worked hard to make this visit possible that we have been waiting for a long time. It’s satisfying,” says Dosé.
Thanks to Boeing’s cooperation, the investigators left with a considerable amount of information to process, including satellite data from the aircraft. “A year of work will be necessary,” says the lawyer who also welcomes the involvement of Judge Carole Ramet, who called to other functions. The meeting originally scheduled with investigators FBI, who conducted their own investigations, however, could not take place. It could take place soon in France.
The (investigation) track of pilot suicide (theory)
According to our information, the trip to the United States revealed that MH370 had been piloted till the end. The data provided by the American giant supports a (investigation) track discreetly followed by the French gendarmes: namely, there was someone behind the (controls) when the plane crashed in the Indian Ocean. (But) “The judges told us that nothing allows us to say that the pilot is involved,” warns Marie Dosé.
However, among those very close to investigations, it is considered that the captain’s suicide thesis is the most plausible. “Some abnormal turns made by the 777 can only be done manually. So someone was at the helm,” said one close to the investigation. Logically, this major data point raises the question of a voluntary crash. “It is too early to state categorically, says an investigator. But nothing substantiates that anyone else could have entered the cockpit … ”
The two faces of the pilot
Zaharie Ahmad Shah’s profile has been closely examined. On the one side, the 53-year-old rider does not show any roughness. Experienced – more than 18,000 flying hours – Zaharie Ahmad Shah was the father of three children, married, he does not seem to have a suicidal profile. On the other side, however, Zaharie Ahmad Shah was not so smooth. The pilot of Malaysia Airlines was a strong political opponent of those in power.The day before the disappearance of the MH370, he planned to attend the trial of Anwar Ibrahim, the main leader of the center-left Malaysian opposition. From there to imagine a vengeance against those in power? “It’s very complex and intimate, the causes of suicide,” says a good connoisseur of the file. In the final report, however, the Malaysian authorities appeared to exhonerate the pilot. “It’s not surprising. Malaysia has no interest in incriminating the national airline … ”
The terrorism track investigated
The Anti-Terrorist Branch of the National Police (SDAT) and the Directorate General of Homeland Security (DGSI) are participating in the investigation to explore the path of external interference. Without having been able to substantiate it so far. These specialized police officers, for example, used facial recognition software from the video recordings of the passengers boarding but the investigation was not very conclusive.The police also looked at the possibility of terrorist action by Uyghur or Tamil groups, but found no evidence to implicate them. Finally, they also dismissed the any action against engineers from the American company Freescale, present on board the aircraft.
Sabotage investigated
At the beginning of the investigation, the presence of a Malaysian aeronautical engineer sitting near Satcom, the satellite system of the aircraft, allowed for imagining the hijacking of the aircraft. “This assumption seems unlikely because he would have been intercepted by other passengers and the crew when he began to rummage with a screwdriver over him,” says a someone familiar with the file. This Wednesday, the judges have also explained to Ghyslain Wattrelos that the unit to be hacked was 3.60 m in height and was very difficult to access. The gendarmes of the SR GTA have also recently received a report from the Satcom that excludes the possibility of remote hacking.
Inconsistencies that are raised
A report on the passengers and baggage brought on board has just been given to the investigating judges. Its author was present in court at the meeting. “We realize that there are several contradictory passenger lists, for example in the seating of passengers, says Ghyslain Wattrelos. It was also learned that a mysterious load of 89 kg had been added to the flight list after take-off. A container was also overloaded, without anyone knowing why. The expert draws no conclusion. It may be incompetence or manipulation. Everything is possible. This will be part of the questions for Malaysians.”
http://www.leparisien.fr/faits-divers/vol-mh370-revelations-sur-le-crash-mystere-10-07-2019-8114283.php
@CanisMagnusRufus
They say: “However, among those very close to investigations, it is considered that the captain’s suicide thesis is the most plausible.”
My reading is the pilot suicide thesis is their current leading theory. However, they point out they have no proof the pilot was ZS. In other words, (my words) no radio transmission or anything to provide exact identify of the pilot in the cockpit. So we must extrapolate from the evidence we have, which to me certainly appears like ZS at the controls.
@TBill
@Richard
Although I have not been participating much recently, I’m still following the case and try to have a look at this blog site once a week or so.
Evidence is piling up that MH370 recovered from a steep descent (e.g. French flaperon analysis, possible new input from Boeing). The crash site can therefore easily be further away than 25 nm from the seventh arc. A route BEBIM – ~McMurdo is still the only route that works exclusively with waypoint navigation. We know that MH370 was following a waypoint route after the diversion and up to the point it was turning south. Why not assume the same pattern for the rest of the flight?
This route implies that MH370 burned a lot of fuel while circling around Sumatra, trying to avoid radar detection. I remain unconvinced that any pilot (presumably a non-Indonesian national) could predict with any confidence that the Indonesian radar was turned off after midnight (when Indonesia said it was operational at that time and did not detect MH370 in own airspace), or would have taken that risk with so much fuel left. The 18:40 phone call means that MH370 must have descended temporarily if it continued on to BEBIM later. The reason for this, then, was to reduce radar line of sight.
@Richard
Thanks for doublechecking!
@Nederland said: Evidence is piling up that MH370 recovered from a steep descent (e.g. French flaperon analysis, possible new input from Boeing).
The French analysis of the flaperon is not new, and occurred before the ATSB’s analysis of the flap, which indicated the flaps were retracted. My guess is the majority of the new input from Boeing is the unredacted Inmarsat data set, which we’ve had now for two years. Sharing the data might have required a confidentiality agreement, as that data was shared with Boeing under similar terms. Perhaps the end-of-flight simulation results were also shared.
Does anybody really think that Boeing would have additional information regarding the end-of-flight that was not shared with the ATSB?
@Victor
The French flaperon analysis excluded the possibility that the flaperon came off before impact because of flutter. This means that the aircraft can not have hit the water at very high speed (as indicated in the two final BFOs). Otherwise the flaperon (and other parts) could not be in the state they are now, i.e. relatively well-preserved.
The French flaperon analysis also stated that the French investigators were unable to receive final confirmation from Boeing that their analysis of the damage was correct.
One possibility is that the new cooperation with Boeing means that their analysis of the flaperon damage has been confirmed.
@Nederland: If we’ve learned anything, it’s to not trust anything but hard data. I’ve seen so much bad reporting and incorrect interpretation of data that I put little weight on what journalists say, and even less weight on what a lawyer, i.e., a paid advocate, says.
@Nederland
I am still in general agreement with you. I assume you have checked out MH370-Captio.net flight path which is a well-thought out radar avoidance path near Sumatra. Maybe however the pilot did suspect radar was off, and nonetheless made a decoy flight path northwest before FMT south.
Overall I would say there are divided opinions on how the flight to the SIO was conducted, how the crash happened etc. The only thing really matters is, if someone decides to search, it is up to them to decide where they want to search.
I think if I was advising Malaysia, the assumption should be Arc7 +/-25, even though I agree it may well have gone further. I think they should probably check 20-25 South even though that is only a secondary pin for me. Then they can probably call it quits in good faith.
As far as if we can pinpoint a location, that would be great but there is so much divisiveness, I have limited confidence in the suggestions. So then if it is a private search, they can check whatever pin they want to. If they take suggestions, I’ll maybe put one in, perhaps jointly with you.
@Nederland
You stated “One possibility is that the new cooperation with Boeing means that their analysis of the flaperon damage has been confirmed.”
That is conjecture based on incomplete information from a newspaper article.
The Australian ATSB report in 2016 on the confirmed MH370 debris item of the Right Outboard Flap, manufactured in Italy by the Airbus company Alenia, is based on a physical analysis and concludes the flaps were not extended. (“Damage examination on the recovered part of the right outboard flap (Item 19), together with the damage found on the right flaperon (Item 1) indicates that the right outboard flap was most likely in the retracted position and the right flaperon was probably at, or close to, the neutral position, at the time they separated from the wing.”)
The French DGA report in 2015 on the confirmed MH370 debris item of the Right Flaperon, manufactured in Spain by the Airbus company CASA, is based on physical analysis and rejects flutter as a possible cause of damage, but comes to no firm conclusion, only an unconfirmed hypothesis that the damage was due to impact with water. (“The little data supplied by Boeing did not enable the examination to be progressed by making calculations that would have made it possible to confirm or reject the proposed hypothesis.”
The Malaysian SIR concludes “It should be noted that the DGA/TA, after examining the flaperon soon after it was found in July 2015, had concluded that the flaperon was likely to be deflected at the time of impact. This was primarily based on the damage observed on the trailing edge of the flaperon. However, this scenario was considered a hypothesis only due to lack of corroborating information, and more importantly, it was done without the benefit of the damage information available from the right outboard flap which was found much later.”
Quite clearly the analysis by the DGA was thwart by the ongoing rivalry between Boeing and Airbus.
Quite clearly the analysis by the ATSB and DGA was thwart by the lack of co-operation between Australia and France.
Nevertheless I prefer the more recent ATSB analysis, above the earlier DGA analysis. I prefer both analyses above conjecture based on a newspaper article.
I think the course of action taken fits well with a pilot expecting a delayed response having gone missing. I believe that expectation could have been formed following years of night flying in the area concerned.
What would be interesting to know is whether at any time in the past ZS had intentionally delayed handover or gone dark for a brief period to observe what (if any) reaction had followed.
I remain convinced that MH370 was chosen well in advance due to a combination of route, time of day and having a pliant co pilot aboard.
I see the Jailing of Anwar Ibrahim as a coincidence, timing wise. I expect it was a foregone conclusion for some time well before the day of the flight, although it could well have been a factor.
For you French speakers, here’s an interview with Ghyslain Wattrelos and Xavier Tytelman. There is not much in the way of new information. GW continues to believe the plane was downed in the South China Sea and the Americans know, the Chinese know, and some French know. GW claims the theory that there was a suicidal pilot that was in control until the end was proposed by a single Boeing engineer, and does not seem to be the official position of Boeing.
@Victor
I call denial…if GW found a Boeing engineer admitting pilot suicide, then he might be getting to the heart of the matter.
@Victor
Many thanks for making the interview with Ghyslain Wattrelos (NOK) and Xavier Tytelman (Aviation Consultant and Co-Author of the newspaper article) available.
Both agree in the interview, that the visit to Boeing brought nothing new from a technical perspective.
Ghyslain Wattrelos continues to believe he is being given the run around by the authorities. He is certain that the US, French, UK, Australian, Chinese and Malaysian Governments know the truth, but are keeping the truth hidden. He hopes, that one day someone will blow the whistle.
@Victor
@Richard
@TBill
I couldn’t give less on the newspaper article in Le Parisien, which is probably a concoction of something already known since years.
My point was that there is increasing evidene that MH370 recovered from the steep descent indicated by the two final BFOs.
The more debris parts turned up, which have in common that they are relatively well preserved, the less likely it became that ALL of these came off in flight because of flutter: e.g. the flaperon, the outboard flap, some wing panels, flap track fairing and so on (not least the vertical stabiliser).
I agree that there was a communication problem between France and Australia. As a result, the French tentative assumption that the flaperon indicates a controlled ditching is probably wrong. Their report isn’t very specific on this, this was just a hunch at the time. The report, however, is very affirmative in that the flaperon did not come off because of flutter (I’d say this is hard data because they personally inspected the item, not just a photograph). But if it didn’t come off because of flutter, and this was a high speed impact, extrapolated from the two final BFOs, then how can the flaperon (and all the other parts) be so well preserved?
(“t appears possible to exclude in-flight loss of the flaperon since its weight is concentrated forwards, which would a priori lead to a fall with the leading edge forwards and the probable destruction of the latter. The damage to the trailing edge would also likely be different.”)
It is also worth noting that the ATSB didn’t see any evidence for flutter damage for any of the parts they examined either – at least they never made any positive statement in that direction.
One alternative explanation I could think off is an in-flight explosion in which an entire wing came off and went down separately, but this sounds unlikely, too, and there are also parts from both wings, not just the one.
Most importantly, the area around the arc has already been searched to widths of 25/40 nm. If the wreckage is outside that area, then the aircraft probably recovered from the initial steep descent. There are very few other options left.
(btw, the end of flight scenario is entirely different from the route, other than that routes south of 25S are back in contention).
@Nederland
Re:
“Most importantly, the area around the arc has already been searched to widths of 25/40 nm. If the wreckage is outside that area, then the aircraft probably recovered from the initial steep descent. There are very few other options left.”
There is no evidence that there was a “steep descent”, let alone a “dive”. The so called “Eight Second Dive Evidence” (00:19:29 to 00:19:37) is not “evidence” at all.
This has been an unjustified assertion of the “ghost flight brigade” from the earliest days, simply to discredit the “ditching brigade”. It is entirely predicated on accepting the 00:19:37 BFO, which Ashton et al clearly said was “”iffy””
TO QUOTE DIRECTLY FROM:
The Search for MH370 – Chris Ashton, Alan Shuster Bruce, Gary Colledge and Mark Dickinson
(Pages 15 – 16)
(HIGHLIGHTS MINE)
5.3. Refinement of BFO Samples.
Detailed analysis of BFO samples taken from other flights showed a high degree of consistency for the signalling message frequencies, with the exception of those that were performed immediately after the initial logon process.
This called into question the BFO measurements after the log-on sequences at 18:25 and 00:19.
However it was also determined (by the same method) that the first message transmitted by the aircraft in the logon sequence, the Logon Request message, did provide a consistent and accurate BFO measurement.
This means that we can use the Logon Request message information from 18:25:27 and 00:19:29, but it is prudent to discount the measurements between 18:25:34 and 18:28:15 inclusive, and the one at 00:19:37.
(NOTE THAT LAST STATEMENT)
The “ditch” is a real possibility.
It is about time that this is admitted by the ghost flight brigade.
@ventus45: You are quoting from Ashton’s paper from Sept 2014 and ignoring the later, more extensive work on the BFO by Ian Holland of the DSTG from January 2018. (That more recent work was performed with the assistance of Inmarsat and Thales.) Whether or not there was a controlled descent and ditching after the steep descent suggested by the final two BFO values, there certainly is evidence that a steep descent occurred, and I strongly suggest you read and understand Holland’s paper before accusing others of “unjustified assertions” in order to “discredit the ditching brigade”, which frankly is a load of horse manure.
@VictorI
I think you misunderstood GW’s interview.
GW continues to believe the plane was downed in the South China Sea
He didn’t say this anywhere in the interview.
…and the Americans know, the Chinese know, and some French know.
This is true, he did say that.
GW claims the theory that there was a suicidal pilot that was in control until the end was proposed by a single Boeing engineer, and does not seem to be the official position of Boeing.
Not exactly. What GW said was the following: I think, very quickly, a link was drawn between the claim of one Boeing engineer that the plane was ‘piloted’ till the end, and the idea that the pilot in charge, ZS, was suicidal. I’ll tell you exactly what the judge told me. We don’t have ANYTHING about the pilot to support this theory, and much to support against this theory. (see 5:15 onwards)
I have closely followed GW’s interviews and I have never seen him this happy till now. Clearly, the outcomes from the French investigators visit to the US has improved his mood. I have great sympathy towards him, and towards all the other NoK’s.
@ventus45
Even the early article by Ashton et al. acknowledges that the penultimate (and ultimate) BFO indicate a steep descent:
“The errors at 16:42,16:55 and 00:19 are thought to be due to vertical movement of the aircraft”, p. 21
Wattrelos also says right in the beginning that he met “judges” (a group that includes aeronautical experts) who recently came back from Boeing “with a pile of documents” but said that these are confidential.
The information that MH370 was in control until the end (as reported from Le Parisien) came from a Boeing engineer (~5:30 min). Right in the beginning (~2:10 min) he seems to indicate (difficult to understand) that this is based on a single piece of debris (presumably the flaperon). He goes on to say that the judges have told him they have no evidence to incriminate Zaharie, but a lot to exonerate him.
W. talks about the Inmarsat data only in general terms, nothing new here.
@TBill
Yes, I did check MH370-captio.net (which came out later) as well.
@CanisMR said: I think you misunderstood GW’s interview. He didn’t say this anywhere in the interview [that the plane was downed in the South China Sea].
Of course he did! There was an entire discussion about this starting around 18:00. First he claims that the Americans know what happened because the area was surveilled by AWACS and ships. Then around 18:11 he said the plane was shot down (“Cet avion etait abattu”) and the only question is for what reason. He says if it was shot down because it was hijacked, he could accept that. In various parts of the interview, he completely rejects that the captain committed suicide, the military radar data because of the anomalous altitude measurements, and the SIO crash site because no debris was found in Australia.
Re: GW
I agree with GW that Boeing, Malaysia, FBI, CIA, France etc etc know something about MH370 that they are hiding. But when GW gets access to priviledged info to say it looks like pilot diviersion, he cannot accept that. He will only accept the inside info if they say the cause is shoot down. He “knows” it was a shoot down and when the authorities finally agree to his theory he will be happy, otherwise he knows they are lying.
Seems to me….
It has been some time since I have last made a public comment on the various options, primarily as it seemed appropriate to let Ricahrd’s drift analysis proceed without too many distractions. However, as the discussion has reverted to the interpretation of the satellite data, I have read some of the recent work by Dr.B and others and would like to offer some comments.
With regard to who did it, I prefer the slang term “the perp” which de-personalizes the discussion and focuses on the objective analysis of the satellite an other quantifiable data.
I spent a lot of time trying to match up the pre and post FMT candidate paths, and experimented with some of the proposed diversion paths prior to and after the FMT with only moderately interesting results.
But, at the time,I returned to my earlier analysis using Barry’s spread sheets and assuming the minimum number of turns in the flight. I added in the offset path in the leg leading to the FMT, which, amongst others Barry, Geoff Victor and I studied. My own thinking was confused by a statement in one manual that the offset would be cancelled if a waypoint turn of greater that 90 deg was performed, which is certainly true at the FMT, but I have recently seen a statement in a blog on flight simulators that the criterion is 135deg. I have not revisited this issue as yet.
The most satisfactory result I had obtained with a FMT 18:41:30 where the azimuth would be 196T and continuing the turn to 182 deg for the remainder of the flight and a constant M=0.82 The end point at 00:11 would be 92.45013 -34.49622. To do this, I had to modify Barry’s spread sheet to enter the detailed track azimuths for the offset and for the FMT so as to give smooth transitions in azimuth consistent with standard turns.
The path runs very close to ISBIX. So, instead of a arbitrary turn to 182 deg, the next waypoint after IGOGU would be ISBIX. Alternatively, a path IGOGU-BEDAX_ISBUX also results in a 182 deg heading. All of these may differ by a fraction of a degree, but seem good enough given the sparsity of the data. (I believe that a turn to 180 at some point after the FMT would also yield a good result, but I have not studied the scenario. Dr.B’s recent work suggests it might, but the M would need to be reduced so as to permit continuity through the FMT without assumed maneuvers.)
At this juncture I do not see an objective way to differentiate between the various alternatives. It would be helpful to be able to do so in order to find a definitive path so as to make a stronger case for the search location, but since the location is the same, is it a distinction without a difference?
Whether the plane crashed near to the end point or performed a glide maneuver may not be relevant as we would be searching a small length along the 7th arc and could easily search that area to a greater transverse distance if the initial search did not locate the plane.
To a certain extent the above results are constrained by the design of the spread sheet, which assumed a constant M for the entire path and which used an earlier version of the met data. In addition to the above assumptions, the 182T is constrained to be a GCP, so that cross-track errors are ignored.
I am happy to share the actual; spread sheet with anyone who has previously posed a detailed study of the route. The actual base spread sheet has previously been published by Barry.
Sid
I have recited some history from memory and I apologize to any IG member whose work I have mis-characterized or omitted to mention.
Re end of flight
Also note the wording Foley used when questioned about the ATSB search strategy by the Australian Proof Committe:
“Today we have an analysis of the flap that tells us it is probably not deployed.
“We have an analysis of the final two transmissions that say the aeroplane was in a high rate of descent.
“We have 30 pieces of debris, some from inside the fuselage, that says there was significant energy at impact.”
“We haven’t ever ruled out someone intervening at the end.”
Note the deliberate change between “high rate of descent” and “significant energy at impact” (rather than *high* energy at impact). This implies that the impact was probably somewhere between controlled ditching and steep high-speed descent (whether controlled or uncontrolled).
Perhaps this was the reason why the ATSB decided in late 2015 to double down on the width of the southern search area rather than to cover northern areas.
@Nederland said: Note the deliberate change between “high rate of descent” and “significant energy at impact” (rather than *high* energy at impact). This implies that the impact was probably somewhere between controlled ditching and steep high-speed descent (whether controlled or uncontrolled).
So you think a “steep high-speed descent” does NOT result in “significant energy at impact”?
You are putting too much emphasis on Peter’s choice of words. He could have just as easily said “high energy impact”. It means the same thing.
@Victor
I have given my explanation in the above. The largest piece found from the Germanwings 4U 9525 crash is just a fraction of the size of the outboard flap, for example. The outboard flap, flaperon, and other parts are too well preserved to have come off as a result of a high speed impact as indicated by the final BFOs. Most parts from MH370 show no interior (core) damage, they simply broke off.
I therefore think that Peter Foley chose his words wisely, yes. But it doesn’t matter at the end of the day.
@Nederland
Here are 3 items of debris from the German Wings crash.
They are not just a fraction of the size of the MH370 debris items as you claim.
https://www.dropbox.com/s/6nfempknr9arxxj/German%20Wings%201.png?dl=0
https://www.dropbox.com/s/e20s01p9fcxgywr/German%20Wings%202.png?dl=0
https://www.dropbox.com/s/w060whn0scgazvs/German%20Wings%203.png?dl=0
@Richard,
OK, thanks for checking.
I’d say #1 is badly damaged/crushed, much unlike the outboard flap and flaperon, which look basically intact except for the bits that were cleanly separated (presumably at first contact with water).
#3 is far smaller than the outboard flap.
I cannot comment on the dimension of #2. Is this a part of the stabiliser? If so, it was very well protected.
Are there any wings part from the Germanwings crash or similar incidents? This would yield a useful comparison.
(https://www.atsb.gov.au/media/5771520/debris-report-3.pdf, p. 4 gives a good impression of the dimension and overall state of the outboard flap).
@Nederland,
The angle of descent, even at 15 or 16,000 ft/min, is not extreme. It is certainly not steep, nor vertical. These terms have been used extensively by the popular press. Assuming the aircraft speed is, say 500 knots, then the descent angle would be about 16 deg below the horizon. However the speed would be increasing rapidly, as would the potential for structural damage to the airframe. With the likely acceleration at that time, and with no engine power (another assumption) the aerodynamic loads on the control surfaces may make it impossible for one person on the control column to recover from the descent.
The simulations done by ALSM and others suggest that the descent through 15,000 ft/min was during the latter stages of an accelerating spiral dive. Even if a successful recovery was possible, there is no way to determine the likely heading of the subsequent “glide”.
The structural damage, as evidenced by some of the fuselage interior debris, strongly suggests a catastrophic impact, although that could still be the result at the end a glide scenario.
@Nederland
The part depected in Richard’s #2 item is the lower end of D-AIPX’s rudder, apparently still attached to something of the vertical stabiliser.
You wrote, the “outboard flap, flaperon, and other parts are too well preserved…“. The outboard flap found at Pemba, and inspected by the ATSB, is only one third of the full span of the flap, part of its trailing edge wedge is gone, the remnant of the aluminium alloy flap carrier shows a significant fracture, the remnant of the pivot link shows a facture consistent with a spanwise bend. Preserved is not a word that is in any way consistent with the state of the outboard flap segment, nor with any other part that I have observed.
@Brian Anderson
I think the Ram Air Turbine would deploy and would provide hydraulic power for the flight controls. I do not believe the 777 has servo tabs to provide manual reversion, but I do not know for sure. The RAT is there to provide emergency electric power and primary flight control hydraulics.
Yes, the right outboard flap is around a third of the original piece. It is cleanly fractured with no apparent core damage which you would expect if the aircraft hit the water at around 500 knots and gets squeezed as a result. The largest parts from Germanwings (#1 above) is heavily crushed (and appears still smaller than the outboard flap). The flaperon, on the other hand, is in one piece, except that a part of the trailing edge came off (presumably on impact with water), nothing like this survives from the Germanwings crash. Almost all the other parts found from MH370, too, are fractured around the edges with no crush/squeeze (core) damage. The damage to the right outborad flap (to me) indicates that the aircraft came down near level but with the left wing first. Therefore there are almost no parts found from the left wing, but a disproportionate number from the right wing, and the left section of the trailing edge of the right outboard flap came off, too.
In the case of the Germanwings crash, the crash site was found immediately with around a million pieces. We only have around 30 pieces from MH370 and amongst these are many still larger (and in a much better state) than the largest pieces from Germanwings. It is well possible that even larger parts, e.g. from the airframe, were once floating on the ocean but sunk over time.
Ethopian 961 came down in a similar way (attempted ditching with no fuel), left wing first, and the fuselage broke up on impact). I would at any rate expect a worse outcome in the case of MH370 since the first stage of the descent was a high-speed descent rather than a glide.
@nederland,
D-AIPX made a controlled descent into a mountainside. Before it impacted with the ground there were no aerodynamic conditions that presented any risk to its structure. The condition of recovered debris from 9M-MRO, and the most likely interpretation of its end of flight profile, does not exclude the possibility that it experienced some aerodynamically induced structural failure before impact.
The area over which the debris of D-AIPX is strewn is more worthy of consideration/comparison than the debris itself. That terrain, the vertical profile, in deep seafloor bathymetry could be a challenge to making a successful side scan survey.
@Nederland
Interesting perspectives above…I was not paying attention to MH370 when NTSB expanded the orig search zone wider.
The overall picture is that ATSB was saying then, nominal 38 South Bayesean hot spot if we assume 18:40 sat call was FMT. What IG is now saying, my words, essentially IG believe that hot spot moves to 34.5 South if we relax 18:40 to not being the FMT. In both cases passive flight after 19:41 is prioritized.
Re: final crash scenario, IG holds passive, rapid descent per BFO, whereas William Langewiesche is saying active pilot, rapid descent. In both cases we end up near Arc7. Of course I fear it may be active, not-near-Arc7 end point descent. It could also I suppose be passive not-ending-near-Arc7 descent.
@TBill: If there was no loiter, no ongoing descent at 18:40, infinite fuel, some BFO bias drift after 19:41, and faster-than-predicted debris drift, 38S looks like a hotspot. In consideration of our best estimates of fuel consumption and debris drift, and a more rigorous treatment of some of the statistical parameters, a crossing near 34.3S looks more likely.
If there is a single route (i.e., a single, sharp peak of the objective function) with no pilot inputs after 19:41, that makes it very unlikely that the route was flown with significant pilot inputs after 19:41. This is an important point to understand. If this condition is satisfied, then “passive flight” would not be an assumption. In fact, it would be proven with a high level of confidence. The question is then whether the condition is satisfied.
I have no idea why you believe “William Langewiesche is saying active pilot, rapid descent”.
@Victor
Without re-reading William Langewiesche, my interpretation is he is willing to go along with passive flight assumption (at some risk that is incorrect, he says) but I thought he was saying the descent itself seemed to be active, that the pilot pushed the nose down for a catastrophic crash. I am not in total agreement with all of William Langewiesche’s interpretations, but overall of course I am in general agreement with him on the basic scenario.
Take for example Egypt Air 990 (suspected pilot suicide, impact on water):
“The small size of most of the recovered pieces of wreckage was consistent with the airplane impacting the water at a high speed.”, p. 34
There was a second debris field associated with the left engine which came off in flight and this included some wing parts.
If, however, the French report is right to say that the flaperon probably didn’t come off in flight, but only when hitting the ocean, then the impact does not seem to be at a very high speed.
Link to the accident report of Egypt Air 990:
https://www.ntsb.gov/investigations/AccidentReports/Reports/AAB0201.pdf
Silk Air 185 (suspected pilot suicide/crash in river):
“The aircraft parts found in the river were highly fragmented and mangled on impact, see Figure 8. As a result, all parts of the aircraft were mixed together on recovery, making sorting and identification of the many small pieces difficult.”, p. 8
https://reports.aviation-safety.net/1997/19971219-0_B733_9V-TRF.pdf
Some parts came off in flight and were therefore found on land, including a wing panel around two metres long (p. 9 and figure 7).
Pictures of the debris found in the river: p. 229-232 in the pdf (figure 8)
@Nederland
When we find MH370, you will find 10’s or 100’s of thousands of small pieces on the ocean floor, as long as you sift through the sediment, far enough around the crash site.
@Richard
Again, my argument is that none of the recovered pieces in the incidents quoted above is comparable in terms of size and failure mode to the outboard flap, flaperon etc (if they didn’t come off in flight).
@Nederland: The debris fields from Egypt Air 990 and Silk Air 185 provide evidence that in a high speed descent leading to a crash, control surfaces may separate in-flight and be recovered as relatively large pieces, which is consistent with the recovered flaperon and flap of MH370.
The French hypothesis that the flaperon did not separate in-flight is based on the lack of dents on the leading edge, which they believe would have been first to hit the sea because the center-of-mass is shifted towards the leading edge. It’s also possible (and many of us think more probable) that the damaged flaperon, which is asymmetric and light-weight, would have spun on the way down, perhaps more like a falling sycamore seed.
@Victor
Sorry, but I presume the DGA team was aware that a good chunk (a third?) of the trailing edge is missing when they came up with their assessment.
Also, their other argument is that the damage that occurred at the point the flaperon separated from the rest of the wing can only be explained with water impact, not with flutter or similar aerodynamic failure scenarios:
“The loads generated, pushing from the lower surface towards the upper surface locally (unlike uniform aerodynamic loading), resulted in a bending load from the rear towards the front as well as of inboard towards outboard. This caused torsion on the flaperon.” (p. 26, There are more technical explanations like this in the report.)
The previous working assumption was that the damage to the hinges indicates flutter damage, which seems not to be true.
(This is unrelated to speculations about whether or not the flaperon was deflected).
I remain unconvinced…
@Nederland
Again, my argument is that three recovered pieces from the German Wings incident, that I picked off the internet are comparable in terms of size to the MH370 outboard flap and flaperon.
Here is a picture of what appears to be a section of the vertical stabiliser, which is even longer than the MH370 outboard flap or flaperon.
https://www.dropbox.com/s/adfaqewm1dez5xu/German%20Wings%204.png?dl=0
The facts contradict your continued unfounded conjecture.
@Richard
How can you tell the length of that piece?
No surprise that the vertical stabiliser is the least damaged in the Germanwings crash.
@Nederland
RE: “If, however, the French report is right to say that the flaperon probably didn’t come off in flight, but only when hitting the ocean…”
The French DGA report states (my emphasis) ‘..it appears possible to exclude in-flight loss of the flaperon since its weight is concentrated forwards…’. It also states, in relation to in-flight separation: ‘A simulation of a flaperon fall with an initial speed corresponding to that of an aeroplane in flight would enable this to be definitively eliminated.’. Given that no such simulation was conducted, it is by no means certain the flaperon could only have separated on impact with the water. As Victor and others have mentioned, the flaperon might well have separated earlier if the aircraft broke up in-flight. The flaperon’s aerofoil shape might then have caused it to fall like a sycamore seed.
Further, the DGA’s separation hypothesis relies on the flaperon being deflected at the time of impact with the water. However, the ATSB’s more recent analysis shows the flaps were ‘most likely in the retracted position’ and the right flaperon was ‘probably at, or close to, the neutral position’ at the time the surfaces separated from the aircraft. If that was the case, the justification for saying the surfaces could only have separated on impact with the water seems even less certain.
The fall characteristics of the flaperon could probably be determined, if one was tested in a vertical wind tunnel, like the ones skydivers use. There are plenty of them around.
Add, personally, I have a hunch, that due to it’s shape, it would be more likely to continuously pitch down about the quarter chord line, that is, rotate about the quarter chord line, that is, “tumble”.
If it hit the water at the instant when the trailing edge was rotating though the bottom position, that might explain the ripping off of the trailing edge.
Why not get a flaperon from a decommissioned 777 in a boneyard, and test it ?
The hypothesis that the flaperon was perhaps deflected was derived from the lower third of the trailing edge, which probably came off on impact with water. Perhaps the aircraft was in a tail down attitude and this could also explain the similar damage to the outboard flap. How else can the damage to the trailing edges of both parts be explained other than with impact on water (i.e. if they came off in flight)?
At any rate, this is unrelated to the torsion damage on the leading edge (which independently makes it unlikely that the flaperon came off in flight) as well as to the aerodynamic considerations on how the damaged flaperon goes down. Neither the SIR nor any of the ATSB reports came to a different conclusion here and/or made a case for flutter damage/in flight separation for any of the parts found from MH370.
I agree there is no 100% certainty right now, perhaps something new will come out from the recent collaboration with Boeing (other than a second hand report).
@Nederland. The torsion damage might have resulted from the flaperon outboard end striking the adjacent outboard flap, either by that end of the flap being forced down and inboard or the flaperon forced up and outboard, though there is some conflicting evidence.
I covered this, the French report and other aspects of flaperon and flap damage in the below, which also refers to earlier work. It might be useful background.
https://www.dropbox.com/s/kqgi5tjcnjzc25e/Flaperon%20Separation%2C%20MH370.docx?dl=0
@David
Have you received comments from the DGA?
Some parts of your paper seem to support the above mentioned scenario:
“Whereas the DGA ditching hypothesis does not support a ditching, deployed or not and clearly this lateral displacement hypothesis does not support a flaps-down ditching, it might support one flaps-up. The right wing striking the sea might generate both the lift and drag to break the wing as described above”
“a separation initiated by flutter should would portray more ambiguity in the character of failures of the upper and lower skins than the DGA examination describes”
p. 14
@Nederland
RE: “The hypothesis that the flaperon was perhaps deflected was derived from the lower third of the trailing edge, which probably came off on impact with water.”
My issue is that you keep saying ‘probable’. The French DGA report hypothesises a possible scenario, which they were unable to confirm. The report clearly states: ‘Beyond the possible in-flight loss, which is not entirely excluded, this scenario can only be considered as a hypothesis…’.
@Nederland
You asked “How can you tell the length of that piece?”
(1) By comparing its length to the height of the 3 crash site workers in red jackets in the same picture to the left and the 1 crash site worker in a red jacket in the picture below to the debris item.
https://www.dropbox.com/s/vjx40q4mbuchyk0/German%20Wings%205.png?dl=0
(2) By comparing the debris item to a picture of D-AIPX and the known dimensions of an Airbus 320-200.
https://www.dropbox.com/s/kkwndeup6uuuz6o/German%20Wings%206.png?dl=0
@Nederland. “Have you received comments from the DGA?”
No. Not that I expected any.
@Andrew
My understanding of the French report is the following:
The “hypothesis” that the aircraft was ditched/flaps down was seen as *possible* at the time (this is now seen as unlikely because of additional evidence).
The scenario that the flaperon was lost in flight is “not entirely excluded”, but “it appears possible to exclude in-flight loss” (i.e. unlikely)
The scenario that the flaperon came off on impact with water is seen as *probable* and not just because of the damage to the lower third of the trailing edge (e.g. “it appears that the flaperon impacted the water while still attached to the aeroplane”, p. 29 and “Local impact on the lower side trailing edge generated torsion on the flaperon (bending upwards from inboard to outboard And from rear to front)”, p. 26)
Clearly, the report argues in favour of separation on impact, not in-flight loss (and not 50/50).
http://mh370.mot.gov.my/Appendix-1.12A-2-Item1Flaperon(Main).pdf
@Nederland
I estimate the length of the D-AIPX Vertical Stabiliser debris item is around 5.5 m.
The length of the 9M-MRO Flaperon is 2.315 m.
https://www.dropbox.com/s/j233ffuj7rd4zeh/D-AIPX%20VS%20Debris%20Dimensions.pdf?dl=0
@Richard
OK, I can see that the vertical stabiliser of the Germanwings flight is of considerable size.
However, as has been pointed out before by Don (“D-AIPX made a controlled descent into a mountainside”), the Germanwings flight is perhaps not the ideal point of comparison.
I also drew attention to Egpypt Air 990 and Silk Air 185, which seem to match the presumed descent rate of MH370 better than Germanwings.
How about the photos in figure 8 (p. 229-232 of the pdf) from Silk Air 185? How would a piece the size of the outboard flap or flaperon fit in here?
https://reports.aviation-safety.net/1997/19971219-0_B733_9V-TRF.pdf
(We have two separate line of arguments: the one is that the flaps etc can still be in the shape they are despite high speed impact on water, the other is that, while the former seems unlikely, it is still possible that these pieces all came off in flight).
@nederland, others
A recurring call at this blog has been a call for ‘raw’ data, that is, the most fundamental, minimally processed, data pertaining to a particular topic concerned with the loss of 9M-MRO. Civil ATC radar surveillance data: the trope of wildly fluctuating altitudes, and so on, now refuted. 25 hours of logged SATCOM data: e.g. correlation of satcom data vs otherwise known position for prior MH371 leg. etc, etc.
ICYMI, the objective is to make an independent review and, if necessary, challenge prior conclusions.
In the case of the flaperon an early deduction that became widely held set out that an upward force, acting on the trailing edge of the flaperon, caused fracture and departure of the t/e wedge.
That no other debris was recovered during the subsequent 9 months helped cement a notion that the flaperon t/e broke off by the action of it being dragged along the ocean surface. Then, in July 2018, the DGA-TA report published as an appendix to the Malaysian SIR.
That DGA-TA report contains much detail of the fundamental analyses made by DGA-TA. For example, planche 50-53, 55 & 56: SEM images of portions of the remnant composite upper and lower flaperon surfaces to assess fibre fractures within the inner and outer skins. Findings from the SEM analysis set out that fibres of the upper surface, inner and outer skins, fractured in traction whereas the lower surface, inner and outer skins, predominantly showed compression fractures. This composite materials analysis suggests that the force was acting downwards on the flaperon t/e. A downward force acting on the t/e contradicts any notion that the t/e damage resulted from ‘dragging along the water’.
Above, @Nederland mentions the MSR990 crash. Some significant facts, relevant to the case of MH370, are presented by the Structures Group and Performance Group of the NTSB’s investigation. These include: 1) rate of descent progressing through -17K,-29K,-16K, to -25K/fpm during the final 75 seconds (radar derived by three ARSRs) before impact; 2), the flight path angle exceeded -70º during the final 60 secs of descent; 3), that the two debris fields were some 400m apart; 4), that the area of larger debris field was described as only 85m x 75m, and 5) #1 engine detached during descent to be located in the smaller west debris field.
My assessment is that separation of the flaperon, and the adjacent flap, is a consequence of an event during descent but before impact of the greater part of the aircraft.
@Don Thompson
We have to agree to disagree then: the French conclusion from the same evidence is not that the flaperon was “dragging along the water” but that it came off violently on impact with water (not in flight).
(Btw, I still don’t understand why the lower third of the flaperon would come off simply as a result of aerodynamic failure).
The purpose of this blog is also to discuss the possible crash site, and the failure mode of the flaperon and other pieces is certainly important to do that, as the discussion and responses to it clearly show.
I’m not trying to proselytise, just explaining what I think happenend at the end of flight based on the present evidence as I understand it.
@Nederland
Again you state “the French conclusion”.
The French did NOT come to a conclusion! There was only an UNCONFIRMED HYPOTHESIS, that the damage was due to impact with water.
Again I quote the DGA report to you: “The little data supplied by Boeing did not enable the examination to be progressed by making calculations that would have made it possible to confirm or reject the proposed hypothesis.”
You are being obtuse.
@Richard
We are going in circles and you keep on quoting the same line without any context.
The “hypothesis” was a controlled ditching. The information derived immediately from the failure analysis included the obervation that the flaperon likely (not certainly) came off when hitting the ocean, e.g. “Considering an impact with water as likely,” (same page). All of theses considerations then combined to come to the “conclusion” (heading of that section) that this could have been a ditch. If it wasn’t a ditch, then the underlying assumptions (i.e. came off on impact) are not therefore wrong.
Again, this is my view, you are free not to share this view and have your own view. Fair enough.
@Nederland
I and others, object to your unfounded conjecture, your obviously false statements, your bogus attempts to twist unconfirmed hypothesis into a firm conclusion, your changing the word “possible” into “probable” or “definitely”, your quibbling about the semantics of “high energy impact”, your repeated misleading attempts to describe the status of MH370 debris as intact, well preserved and much larger, when compared to other crashes.
I do not object that you disagree.
I and others, object that you are deliberately trying to mislead the investigation.
@Richard
That’s a very strong verdict when all I was trying to do is to explain why I think a glide after a steep descent is a likely end of flight scenario.
At no point was I deliberately trying to mislead anyone, as you make it out. Your criticism is over the top.
I stand corrected on the size of the Germanwings vertical stabiliser (an honest mistake which I have admitted), but that’s it.
@Nederland
Here is a prior “skipping” crash scenario by me on flight sim that could explain the flaperon. It is a high speed/catastrophic glide scenario with one wing touching first. Victor might also have a video like this, if so his will be way better than mine.
https://www.youtube.com/watch?v=YDn9B0fFqRU
@TBill
OK, thank you. Yes, something like that perhaps. Would you say this is controlled or uncontrolled (or can it be either one – the angle does not appear to be very steep, possibly/probably no match to the descent rates derived from the two BFOs…)?
A thought – in order for an aircraft to break up before reaching the surface of the ocean, its speed must highly exceed design limits.
Would that not cause it to break up into a lot of pieces, which would, in turn, create a larger debris field with a higher chance discovery?
@ArthurC wrote “in order for an aircraft to break up before reaching the surface of the ocean, its speed must highly exceed design limits.”
Not necessarily, if the descent was uncontrolled/out-of-control the airframe may be experiencing loads that it simply wasn’t designed to withstand. I referred above to the case of MSR990, an Egyptair Boeing 767. During its out-of-control descent an engine, and possibly more, separated from the airframe yet the two debris fields were both described as quite compact.
On the other hand, Egypt Air 990 came down with full engine power and near supersonic speed, and this is why the left engine and associated parts came off in flight.
@Nederland
The above skipping crash is just showing a high speed (flaps up) smooth glide to the water surface at 5% bank, after fuel exhaustion so the aircraft is gradually losing atitude and speed maybe at about 250 knots at the end. But it is perhaps illustrative, if the descent to the water was not so steep. Flight sim programs tend to not show a steep descent at fuel exhaustion, especially the simple PSS777 model used here gives a kind and gentle glide.
Brings up a question in my mind if we have the pictoral view of Boeing’s official flight sim cases hitting the water? If so I think it might make a visual case for wing hitting first. It is little hard for me to “unsee” the video I posted without realizing it sort of might explain the flaperon.
@TBill
Ethopian 961 is also an example of an aircraft gliding with one of its wings hitting the water first, flaps up, with no fuel/hydraulics left:
https://www.youtube.com/watch?v=WE2Yn0cipTY
@Nederland
RE: ”On the other hand, Egypt Air 990 came down with full engine power…”
No, the thrust levers were moved to idle before the aircraft started to descend. The engine start levers were subsequently moved to cutoff and the thrust levers were firewalled, but the engines had already shut down (Eng 2 increased thrust for a very short time before it was shut down).
My question is: Military radars surely must have tracked this plane…australia, singapore, indonesia. thailand. maybe even a destroyer, aircraft carrier or awacs radar plane?
@Andrew
OK, thanks.
@Nederland,
Silly me, I actually thought you’d done some research rather than simply throwing out specious grijnions.
@Don Thompson
You may be aware that I had discussed these two incidents (Egypt Air 990 and Silk Air 185) in greater detail a couple of years ago on this blog. As far as I am aware I was the first to draw these comparisons. At which time I had studied both at some length. I have now mistaken Egypt Air 990 with Silk Air 185 (they are very similar).
@Don Thompson
Thank you very much.
@Don Thompson
And btw, the main point is that Egypt Air 990 (according to the report) came down at near “transonic speed”. Much of the report therefore is a somewhat apologetic discussion of why the left engine and some other parts came off at this rate (“The reason is that airplane performance and aerodynamic forces change in radical ways as the airplane’s speed approaches 1.0 Mach as it did here.”, p. 42). Whatever the exact reason for this, I doubt that MH370 came down at such a speed in the unpiloted end of flight scenario.
@Nederland said: You may be aware that I had discussed these two incidents (Egypt Air 990 and Silk Air 185) in greater detail a couple of years ago on this blog. As far as I am aware I was the first to draw these comparisons.
I did a quick search of the blog comments to see when the comparison with Silk Air was first discussed. The earliest comment was this one from me on May 8, 2017:
When considering the possibility of separation of parts from MH370 due to overspeed in a steep descent, it is useful to consider the recovered parts from SilkAir 185 in Dec 1997, which was flying from Jakarta to Singapore, and descended at high speed into the Musi River in Southern Sumatra. The US NTSB concluded that the captain deliberately lowered the nose and crashed the plane. Indonesian investigators disagreed, saying the evidence was inconclusive.
Prior to the crash into the river, parts separated due to the high speed, and were found on land some distance from the crash the site. Therefore, we can compare the type and condition of parts expected from a high speed impact versus separation from high speed prior to impact.
These pages, taken from the investigative report, show pictures of the recovered parts. Fragments of composite honeycomb panels recovered from the river resemble similar panels from MH370, and are shown in Fig 8b. By contrast, parts of the horizontal and vertical stabilizer recovered on land are shown graphically in Fig 10a and photographically in Fig 11. The size and condition of these parts resemble the flaperon and flap track fairing recovered from MH370.
@Victor
I don’t want to claim any credit in this regard. A quick search reveals that I had also posted on this (not on your blog, but at that time on the Jeff Wise blog), also in May 2017. I can honestly not recall having read it on your blog first, I’m actually quite sure that I had posted on this long before (maybe not in English).
http://jeffwise.net/2017/05/23/reading-the-secrets-of-mh370-debris/comment-page-1/#comment-206404
I was just saying that I had studied these and other cases long ago in some detail.
The comparison to these incidents is nothing new anyway, the new element at that time was the possible failure mode of the flaperon.
Here is a post from 13 March 2017 (7:52 am, and the following posts), it seems to have disappeared now, but is cached in google:
http://webcache.googleusercontent.com/search?q=cache:UKH6hLxLK8cJ:jeffwise.net/2017/02/23/first-mh17-perpetrator-identified/comment-page-3/+&cd=1&hl=en&ct=clnk&gl=de&client=firefox-b-d
“Nederland says:
March 13, 2017 at 7:52 am
@Jeff Wise
In this case (Egypt Air 990):
http://www.webcitation.org/5zlFg31jj?url=http://www.ntsb.gov/doclib/reports/2002/AAB0201.pdf
parts of the left wing came off, were found in a separate debris field and in better condition (p. 34-36)”
and so on.
@Nederland: The comparison of MH370 to Silk Air is obvious, and not just because of the condition of the debris. Others certainly had made the comparison before my comment on May 5, 2017. I just thought it was odd for you to make a point of saying that this was a new insight that you brought to this blog.
@Victor
I thought it was odd that Don Thompson wrote I hadn’t studied these cases.
@Nederland
Ethiopian 961 is reasonable comparison for a glide scenario at 175 knots though I am thinking MH370 would have hit >200 knots on a hard glide.
@Nederland,
In the case of an honest error concerning the state of MSR990’s engines, I’m happy to disown my sarky reply above.
However, I continue to hold the position I have set out in dialogue above. For my part, I will park discussion for now.
@Don Thompson
Not to worry. We all have stressful daytime jobs, and honest mistakes can happen.
@Asian
“My question is: Military radars surely must have tracked this plane…australia, singapore, indonesia. thailand. maybe even a destroyer, aircraft carrier or awacs radar plane?”
We have a variety of radar sources up to 18:22 just past waypoint MEKAR. After that time, the only active radar the public is aware of is Singapore airborne radar operating in the vicinity. The public has not been advised if the Singapore radar data provides any additional info about where MH370 was after 18:22, or where it was not seen. Indonesia military radar is generally presumed to have shut down for the weekend.
Actually, at that time in early 2017 I was looking systematically for incidents where parts of the aircraft came off before crashing. This coincided with incidents of pilot suicide (Egypt Air 990, Silk Air 185), The only other incident I could find was China Airlines 006. I can not recall that another incident came up in that discussion.
Egypt Air and Silk Air have in common that they both came down at near supersonic speed (either because of engine power or because of an arcane manoeuvre that goes beyond me, e.g. Silk Air: “The evidence showed that the airplane had exceeded its flight envelope during its high-speed transonic descent.”).
China Airlines 006 was a case of dive/recovery, again with engine power. It experienced excessive g forces, and the landing gear door and parts of the empennage came off, perhaps during the recovery manoeuvre. The aircrafts were manufactured in 1997 (Silk Air), 1989 (Egypt Air), 1982 (China), MH370 in 2002.
(There is one incident where a flaperon came off during a normal landing in Frankfurt)
In the case of MH370, on the other hand, the common assumption is that the engines flamed out one after another, and the speed was then reduced, and there was probably no sudden event initiating the descent, which occurred at some point after both engines flamed out.
All I want to say is that in-flight separation really is the exception. It is not immediately clear (to me) why MH30 experienced similar forces.
@Nederland wrote: “in-flight separation really is the exception.”
Getting into a situation where both engines flame-out through fuel exhaustion would certainly be regarded as an exception. No matter what might be added to that situation, pilot input or none, the outcome is no more or no less exceptional. MH370 is right out there on the extremity of exceptional. Separation of flight control surfaces is consistent with exceptional.
Rather than a “sudden event” you might consider a rapid and cascading sequence of conditions precipitating its descent.
@Don Thompson
I agree this is an exceptional event.
However, the accident reports above are clear in their assessment that aerodynamic failure/flutter can happen but only at supersonic or near supersonic speeds.
I don’t know if the maximum velocity of an unpowered 777 can reach that stage, regardless of angle of descent. (and if that is beyond flight envelope by design).
In the above (post by Brian Anderson) and elsewhere I read about an (upper?) estimate for the Boeing design of 500 knots, which is not near supersonic speed.
@Nederland: If you are arguing that a no-thrust steep descent would not damage the airframe, that is wrong. Without a doubt it is possible to reach transonic speeds while descending with no thrust (whether or not the speed goes supersonic). Both Mmo=M0.87 and Vmo=330 KIAS would be far exceeded, and airframe damage would certainly occur at steep descent angles. The combined thrust of the engines doesn’t come close to the weight of the plane. Gravity is a very strong force.
Hi,
I would like to withdraw the post I made on 14 July. I spoke without fully reviewing my old spread sheets and misstated what should be my current position.
The best results that I got were for a start point at 18:22 at the last radar position with an offset cancelled (or perhaps not) at the FMT at 18:41 at IGOGU and then at 186T (overflying ISBIX) and continuing till the 7th arc at a constant M 0.82.
This is a discrete path that is nominally tangent to the innermost arc.
I have not considered fuel consumption as the model has never been updated to take into account all of the work that has been done by others.
I believe that this resets my thinking to the state before the debris was found and before the first search program failed to discover the crash site.
I thus remain in the camp that would be currently described as believing that either the site was missed during the search, or the plane glided after fuel exhaustion.
I apologize for any confusion or consternation that I have caused.
Sid
@Victor
OK, thanks. Basically a question. Would you say, though, this is likely? It sounds it can occur but only in certain conditions (steep descent angle).
@Nederland: The final BFO values show an increasing descent rate that is an average downward acceleration of 0.67g over 8 seconds. If there were no pilot inputs, the aircraft was banked, as I described in this post. If the wings were level, there likely was a nose-down pilot input. Either way, very high speeds and airframe damage would likely occur without pilot inputs to recover.
@Victor
Yes, I had read that post. But the figures are only derived from Microsoft FSX? Is this reliable enough to come to firm conclusions?
(Sorry, not trying to annoy, just a genuine question)
@Nederland: The aerodynamic model is accurate enough to state with confidence that the 0.67g downward acceleration occurs during a banked descent OR with pilot nose-down inputs. Also, in the Boeing simulations that reached this level of downward acceleration, the descent was banked.
@Victor
And would that level of acceleration be sufficient proof that the final speed could be in the area of ~0.9M?
“Also, in the Boeing simulations that reached this level of downward acceleration, the descent was banked.”
So that would mean unpiloted?
@Nederland: Depending on the altitude, either Mmo or Vmo would first be exceeded during the accelerating descent. Either way, the speed limit would be likely exceeded and airframe damage would result.
Yes, all the Boeing end-of-flight simulations that we have were for no pilot inputs.
@Victor
OK, thanks.
I have to say I remain a bit sceptical on how reliable the FSX results are. I have also read about the Boeing simulations on the accelaration/BFOs. That seems clear enough, but I’m not sure if Boeing would want to put information on aircraft design, final speed in relation to free fall, and aerodynamic failure (an obvious safety issue) at any rate out in the public.
Even in the reports above there is a lot of doubt on how reliable Boeing’s own high-end simulators are to come to conclusions like these (e.g. Egypt Air 990, p. 40: The simulator data are based on wind tunnel tests and updated with available flight test data. The maximum Mach number for which the simulator is programmed (Mach 0.91) corresponds to the airplane’s never-exceed airspeed. The maximum speed calculated for the accident airplane during the accident sequence was Mach 0.99 at 0150:23)
@Nederland: Of course all simulators lose accuracy at the performance limits of the aircraft, i.e., at high speed, high angle of attack, etc. That said, if you want to believe that a B777 in a steep descent won’t experience damage to the airframe, I’m done trying to persuade you otherwise. Perhaps others will want to continue with you. There is a reason why aircraft have speed limits, and those limits are exceeded in a steep descent.
I may be wrong, but as far as I’m aware the aircraft is designed aerodynamically so that its final speed in free fall (air resistance) should not exceed the airframe envelope for obvious safety reasons.
I’m not saying that damage to the airframe is impossible, but perhaps not something to expect all too readily in the probable end of flight scenario (i.e. engine flame out one after another, and a period of continuous glide before the descent).
Other opinions are of course welcome.
@Nederland
You wrote that you had researched the case of MSR990, EgyptAir reg SU-GAP.
Did your reading of NTSB sources on the crash delve any further than the Air Accident Brief NTSB/AAB-02/01 (PB2002-910401)?
@Don Thompson
Can you please come to your point. Thank you.
Only material in the public domain of course.
@Nederland
There is no such design constraint. An aircraft can break up. This happens.
Unpiloted flights end two ways.
They bank and the nose drops and this steepens into a high speed, ever tighter spiral dive. Aircraft could break up at transonic speeds.
Alternatively if the nose pitches up the plane could stall and the aircraft would spin at a more steady vertical path.
More likely the nose dropped and a classic spiral dive happened for MH370. Unless an active pilot flew it down. Without any fuel the RAT provide hydraulic power for the primary flight controls so it is possible to pull out of a graveyard spiral and glide.
Options are breakup in spiral dive, dive into the water, spin into the water, or be flown into the water.
@Nederland wrote “as far as I’m aware the aircraft is designed aerodynamically so that its final speed in free fall (air resistance) should not exceed the airframe envelope for obvious safety reasons.
The Air Accident Brief sets out “after the airplane’s FDR and CVR stopped recording, the airplane descended to an altitude of about 16,000 feet msl, then climbed to about 25,000 feet msl and changed heading from 80º to 140º before it began its second descent, which continued until it impacted the ocean“.
It was during the second descent that parts of SU-GAP’s structure separated.
The FDR and CVR stopped recording after the engines were shutdown.
Putting those events in order through an elapsed period of 128 seconds: engines shutdown, recorders ceased & aircraft reached 16,000ft, regained 9,000ft to reach 25,000ft, began final descent (unpowered and during which parts of airframe separated), impact.
And the spoilers were deployed three seconds into that sequence, presumably, to arrest some acceleration.
My point is that your research appears to have missed some detail.
@Nederland: I may be wrong.
There is no ambiguity. You are definitely wrong. Read how Vd is defined, for instance. That’s not the maximum achievable speed in a dive. It’s the dive speed beyond which things break up.
@Hank, Don, Victor
OK, got it.
@Hank
I do not agree steep spiral dive is automatic outcome of unpiloted fuel exhaustion. That’s one of the big questions for MH370. My understanding, and my own limited FSX sim cases, the aircraft will tend to fly in “lazy” circles to the water surface, and *not* go into a tight spiral dive.
Victor has previously shown in FSX that a tight spiral could be forced to happen by holding the control surfaces at a bank, so when the power goes out, the bank is preset. But Boeing’s cases (which did not force a bank) do not show this immediate hard bank behavior.
Alternately, DonT has suggested previously, maybe the pilot made some other less standard settings changes, that forced a spiral dive to happen at the end. Also Victor has suggested (correctly) that the sequence of events at fuel exhaustion is so complex, that maybe the Boeing simulator just cannot capture why a spiral dive developed. The other possibility is the pilot intentionally nosed the aircraft down for a violent crash around Arc7.
But all of they above is trying to argue that a fast spiral dive did develop unexpectedly for some reason, when a less violent descent would tend to be the expected base case. So the other possiblity I think is that there was not a tight steep, spiral descent, and the flaperon maybe came off when the banking jet hit the water.
This my summary of the debate, as I understand it. What I want to do is go back to the Boeing simulation cases and see the max speeds that developed.
@Nederland
In case you’re wondering why an aircraft might break up at very high speed, it’s largely due the extreme buffeting caused by shock-induced airflow separation. At transonic speeds, the airflow is already supersonic over parts of the wings and fuselage, even though the aircraft is still subsonic. Under the right conditions, it’s possible to see the shadow of the shockwave that forms on top of the wing of an airliner cruising faster than about M0.80. As the speed increases further, the shock wave becomes stronger and eventually the airflow behind the shockwave separates and becomes very turbulent. The empennage suffers most of the buffeting and is typically the first part of the aircraft to become damaged and separate in a high-speed upset event.
The Adam Air PK-KKW accident investigation report is another interesting case where the aircraft began to break up at high speed and subsequently impacted the water (http://knkt.dephub.go.id/knkt/ntsc_aviation/baru/Final_Report_PK-KKW_Release.pdf). Have a look at the photos of some of the debris on pages 71-74.
@TBill
You are correct.
There are two lateral-directional stability modes at play – Spiral Mode and Dutch Roll Mode. Both are always present. The spiral mode is more dominant in light planes – and I know this mode well from experience.
The Dutch roll dominates in jet transports because of the highly swept wings. The wing sweep significantly increases the effective dihedral. It is this mode that you see in a hand thrown model glider with very large dihedral.
In Dutch Roll if the aircraft is disturbed in yaw or roll it rolls back the other way and “wazzles” around (scientific term) This is so uncomfortable all transports provide a yaw damper to prevent this from happening – makes passengers sick in the back.
But with yaw damper off it is possible that the 777 just flies around in lazy descending circles.
So maybe the 777 “wazzled” down in a Dutch Roll and hit the water at low angle. Or maybe it fell into the spiral mode at some point and became a “lawn dart.” At some bank angle the “roll into the turn” forces may offset the “roll out of the turn” forces and then the spiral then dominates. I suspect it is not possible to model how such a transition happens, if at all.
You are right that the aircraft may not have rolled into spiral dive and may have “wazzled” down in a Dutch Roll or transitioned into a spiral dive at some point based on some disturbance that increased bank angle rather than rolled it back,=.
Thanks for all the further explanations! I appreciate it.
@Andrew
Thanks for pointing me to the Adam Air report.
I find it interesting that the elevator (p. 72) does not show damage at its lower end, like the outboard flap and flaperon. The flight spoiler (p. 73f) does show damage like that, but you can clearly see (I think) that this is fatigue damage rather than a one-off impact. It looks far more like it came off in flight than a lot of parts from MH370, not just the two.
@Don Thompson
Egypt Air 990 reached its highest speed at 0.99M just before the engines were shut down. I couldn’t take from the report the exact time when the parts associated with the left engine came off other than that this happened still in flight.
@Nederland
The other thing I just noticed reviewing Egypt Air 990 is that the voice and data recorders stopped when the engine/power was cut. This is what I am suggesting for MH370, that the pilot may have cut all power at IGARI to stop recording what was a about to happen (depressuring).
@TBill
Yes, I noticed that too. The question is if that was the reason to shut down the engines at that time?
@TBill suggests “that the pilot may have cut all power at IGARI to stop recording what was a about to happen (depressuring)”
All power? Isolating the Transfer Buses from supply?
That’s a very big increase in pilot workload for very little gain (if any).
@Andrew,
Thank you for the reminder about PK-KKW.
An observation: in the case of both PK-KKW/DHI574 and SU=GAP/MSR990 the major structural failures occurred some time after altitude rate of change and recorded mach had peaked.
In the case of PK-KKW, some 15 sec after RoD+mach peaked, the DFDR recorded a positive to negative load-factor transition coincident with the CVR ‘thump-thump’ event that is assumed by the NTSC to indicate structural failure.
The SU-GAP/MSR990 timeline is longer and a structural failure in the air is assumed by the separate ‘west’ debris field where the #1 engine was located. Time from peak rate of change in altitude + peak mach until the final descent and impact is in the order of 80s. There is no recorder data for that 80s of SU-GAP’s descent, only radar data. I’d expect the separation of the #1 engine to have occurred late in the sequence as the two debris fields were only 400m apart. Mach and RoD is certainly much reduced after the peak and during that final 80s.
@TBill: To follow up on @Don Thompson’s comment, I can’t imagine that any pilot would choose to fly an hour on RAT power, if that’s what you are asking. It is possible that the CVR was unpowered by isolating the left main and transfer busses by flipping the bus tie, the IDG, and the backup generator switches, leaving the right busses (main and transfer) functional. This would keep the flight control mode as NORMAL and also allow the autopilot to be engaged.
Andrew wrote:
I’d expect the separation of the #1 engine to have occurred late in the sequence as the two debris fields were only 400m apart.
An inference, although plausible (I feel that shutting down the engines at transonic speed is the kind of “disruptive event” that I feel is missing in the presumed sequence for MH370 and could explain why one of the engines came off at some point.)
@Nederland
Again, you are not paying attention.
@Andrew
Many thanks for the Adam Air PK-KKW accident investigation report.
As you say an interesting case where the aircraft began to break up at high speed and subsequently impacted the water (http://knkt.dephub.go.id/knkt/ntsc_aviation/baru/Final_Report_PK-KKW_Release.pdf).
As you recommended, I took a look at the photos of some of the debris on pages 71-74. I find the photos very revealing. The pictures are certainly damning evidence, for those who believe in conjecture and complain at Don for making an inference from the short distance between the debris fields.
@Richard
I don’t feel anyone was complaining about Don’s inference from the distance.
The parts on p. 71-74 don’t look like they came off on impact with water. They look like they came off in flight (with engine power). The accident report confirms that. (The aircraft disintegrated and was destroyed when it impacted the water at high speed and a steep descent angle.)
This seems to confirm the possibility that the flaperon, outboard flap and other parts of MH370 did not come off on impact with water if this was also a high-speed steep descent (similar to AdamAir).
My concern was the following:
I find it interesting that the elevator (p. 72) does not show damage at its lower end, like the outboard flap and flaperon. The flight spoiler (p. 73f) does show damage like that, but you can clearly see (I think) that this is fatigue damage rather than a one-off impact. It looks far more like it came off in flight than a lot of parts from MH370, not just the two.
@Nederland: I think you now agree that the flaperon could have been damaged and separated from MH370 in a high speed descent. Correct?
@Victor
Yes, this is correct. This has never been the point I was trying to convey.
In the above post I was arguing that I think it is unlikely that the flaperon and outboard flap (and other parts) came off on impact with water if indeed this was a high speed descent (that is, say >500 kts).
@Victor,
“…the flaperon could have been damaged and separated from MH370 in a high speed descent”
As the French hold the Flaperon and have apparently extensively investigated its failure mode, I presume that the cause of the trailing edge composite failure was investigated. That being the case, one can only assume that a high frequency flutter was ruled out due to the tell-tale carbon fibre break/shear evidence not supporting it.
For the Flaperon to have left the wing while the aircraft was airborne, the wing must have failed independently outboard of the No.2 engine, with the Flaperon being ejected as part of that process. This could mean that the trailing edge collided with something else, otherwise the damage was secondary and occurred in the marine environment.
@Don Thompson
RE: “I’d expect the separation of the #1 engine to have occurred late in the sequence as the two debris fields were only 400m apart. Mach and RoD is certainly much reduced after the peak and during that final 80s.”
I agree. The fact the aircraft levelled off and then climbed before its final descent seems to show there was a struggle between the two pilots for control of the aircraft and I assume that struggle continued until the end. My guess is the aircraft structure was weakened during the first descent and began to break up during the second descent, shortly before it impacted the water. It seems clear the Mach and RoD were lower during the second descent (as you mentioned), but I suspect the indicated speed was very high and probably well over the design limit.
Regardless of the exact sequence of events prior to the main impact, the evidence points to a very high speed descent and in-flight separation of at least the flap segment and flaperon, and probably other external pieces. There is literally zero evidence supporting an attempted water landing.
Re: July 18, 2019 at 7:52 pm.
The reference to “carbon fibre” was accidental. It should read as ‘tell-tale composite break/shear’. My bad!
Presuming that the ATSB outboard flap analysis is correct that the flaps were most likely not down (because there was no fuel left), but in neutral position, then two possibilities remain, right?
1) Impact at very high (transonic?) speed. In this case, the flaps and other parts must have seperated in flight. They can not have come off as a direct result of impact with water because otherwise they would be far more damaged.
2) Impact at relatively low speed following an extended glide (~200 kts?). In that case, no parts came off in flight, the aircraft broke up on impact, but in a less violent way.
A mixed scenario where one half of the aircraft came down at very high speed, the other at moderate speed can be excluded (unless the entire aircraft broke up in flight).
Are we on the same page here?
https://www.bbc.com/news/business-48995509
@BarryC
The DGA-TA stated that they had not received detailed spec of the assembly from Boeing so as to construct CAE models & run tests. DGA-TA did undertake SEM inspections using samples from along the ripped/fractured composite skin edges.
I’m perplexed that so little attention is given to the ‘metalwork’. The damage to the actuator attachment lugs and the adjacent ribs, and the missing ‘hinge plate’ portion, could yet provide important clues. Certainly corrosion has occurred on the aluminium alloy that limits the possible inspection techniques but characteristics of the fracture are evident.
The same applies to the outboard flap segment. That flap, spanwise, comprises four composite torsion boxes with a two piece trailing edge wedge.
Thanks Don.
Yes, and with work undertaken with remote analysis by @David, and @Kenyon and others, I am inclined to believe the right wing broke up in flight and the Flaperon trailing edge composite damage wasn’t directly caused by over-speed but indirectly after the event.
Whereas, the “damage to the actuator attachment lugs and the adjacent ribs, and the missing ‘hinge plate’ portion” was most likely concurrent with the outer right wing breaking-up.
My impression has been over the past 2 years or more, that the aircraft impacted the sea 30° AND with RH side low, i.e. the drag creating parts, tail and left wing trailing high.
@Barry
What do you think could be the cause that the Flaperon trailing edge composite damage wasn’t directly caused by over-speed but indirectly after the event.?
@BarryC
“[…] and with work undertaken with remote analysis by @David, and @Kenyon and others, I am inclined to believe the right wing broke up in flight”
It’s my long held opinion that what you describe is a likely occurence. However, I would emphasize ‘in descent‘ rather than ‘in flight‘. A consequence of an uncontrolled descent.
The most significant consequence, in the context of the seafloor search, is the implication for target recognition in the side scan/SAS images.
@Nederland
You obviously recognise the importance of the MH370 end of flight analysis. This has consequences for the search area definition and the post FMT flight in general. The analysis of the MH370 debris is an important part of the end of flight analysis.
Your discussion started with the premise, MH370 likely recovered from a steep descent and is likely > 40 NM beyond the 7th Arc. You pointed out the DGA analysis excluded the Flaperon parted from the aircraft due to flutter before impact with water. You argued debris is well preserved implying a low speed impact.
You continued your discussion with comparisons to the debris from German Wings, Ethiopian 961, Egypt Air 990, Silk Air 185 and China Airlines 006. You maintained repeatedly Flutter is not a possible cause of separation in the descent of MH370. You argued Flutter only occurs at supersonic or near supersonic speeds, despite the Adam Air 574 report.
Now you agree that the MH370 Flaperon could have separated in a steep descent, but this was never the point you were trying to convey. You are now saying either the Flaperon separated in a steep descent or there was a recovery from the descent and a low speed ditching. A high speed impact with water can be excluded.
You could have spared us the run around in the 12 comments to the contrary.
I disagree with your new conclusion. A high speed impact with water is possible and possibly in combination with Flaperon separation due to Flutter.
@Richard
I think you misunderstood some of my posts.
Yes, my point is that the DGA hypothesis is that the flaperon did not separate in flight but on impact with water (not yet confirmed, but this is a carefully worded text because of its implications and because it was written as part of a judicial enquiry).
There are other reasons which I think could support the above scenario.
I am aware that the end of flight is important. I’m posting about this in good faith.
A separate argument was that an unpowered descent is less likely to cause in flight break-up than a descent with engine thrust. This has been partly refuted (perhaps less likely but still possible) and I am happy to agree that at least in the uncontrolled end of flight scenario separation due to flutter is a possibility.
You wrote:
I disagree with your new conclusion. A high speed impact with water is possible and possibly in combination with Flaperon separation due to Flutter.
This is not a new conclusion. On the contrary, this is what I started with. My point in the above was that *IF* this was a high speed impact (e.g. uncontrolled spiral descent), then the flaperon (and outboard flap) must have come off still in flight/during the descent but before impact. I have never changed the overall argument.
Is this clearer now?
@Nederland
You are so contradictory and cannot even remember what you previously stated.
When Victor, Don, Mike, Andrew and others, all disagree with you, then it is pathetic to blame me for not understanding you.
I give up!
@Richard
I don’t think we are that far away, other than in terms of assigning possibility/probability estimates to certain scenarios.
@Victor
@Don Thompson
Yes I propose all LGEN RGEN power off at IGARI. Two reasons:(1) I propose a hypothesis that plausible deniability was a prime objective (below) and (2) I think it may help explain what we see at IGARI and elsewhere.
Yes possibly, the RAT extended at IGARI (but I tend to prefer not so) or APU was put on at IGARI and Overhead panel was used to cut power to the L and R buses to keep the digital data recorder OFF. Perferably the potential visual evidence at Penang of “spaghetti” of the drop down O2 mask could be stopped, but that is optional, and of course the B777 now has lots of extra power for higher altitude with all GENS off and bleed air off too. I do not know if he we might actually disengage one or both Generators, which is irreversible, or cut them out electronically. Of course I am not claiming to be an expert on how the electric system works in such unsual mode, rather I submitted a hypothesis. Via FSX/PMDG I see I can still seem to fly manually though.
How to conduct a deniable hijacking was my MH370 5th anniversary essay-
https://twitter.com/HDTBill/status/1104562266383548417?s=20
”Now you agree that the MH370 Flaperon could have separated in a steep descent”
OK, I see, this is the “look out for contradictions” game.
In the above, I agreed that it is generally possible that parts of an aircraft can come off in a high speed descent, even if unpowered. In theory, this can also be true for MH370.
I never meant to say that I believe that the MH370 flaperon (likely) came off in flight, for the reasons I mentioned.
I’m not entirely excluding this possibility, just saying that because of the DGA analysis, and other reasons too, especially the new finds since then, I now think this is not very likely.
If this is ultimately about manned flight at the end or not, I have an argument:
Would the perpetrator try to land on water and risk dying of starvation or rather get it over with and crash hard?
@ArthurC
One possibility: The message that MH370 reconnected to the satellite at 0:19 came up on the screen, right?
So, whoever was at the controls could have felt that this allows some tracking (which it did) and decided to fly a bit further, not in order to survive but in order not te be found.
This could possibly explain the sequence steep descent/possible glide after the final satellite transmission.
Nederland: In that event, it would have come up on the screen at 18:25 too, 6 hours earlier. So, that would not be news.
@airlandseam
I believe that powering up the SDU was a manual event, i.e. intentional (for whatever reason, this is still much debated) because the SDU was shut down first (presumably intentionally too).
I don’t think anyone could reasonably expect that the satellite reconnects in the event that the aircraft runs out of fuel. This was likely unexpected/unintentional.
There are three EICAS messages related to the SATCOM:
(1) SATCOM
(2) SATVOICE LOST
(3) SATCOM DATALINK
When the SATCOM is powered down, all three messages appear. When the SATCOM is powered up and logged into the Inmarsat network but not logged into an ACARS server, only (3) appears. At both the log-on at 18:25 and 00:19, (1) and (2) would appear before the log-on and disappear after the log-on, leaving only (3). It could be that the disappearance of (1) and (2) precipitated a pilot-initiated steep descent, but as Mike said, that condition also occurred at 18:25.
Re “I don’t think anyone could reasonably expect that the satellite reconnects in the event that the aircraft runs out of fuel. This was likely unexpected/unintentional.”
That statement is 100% false. Nearly everyone does expect it.
It is virtually guaranteed that the the AES will reboot following main engine fuel exhaustion (MEFE). It is a natural and predictable event, caused by the momentary loss of Left Main AC Bus 115VAC power (to the AES). It was explained in detail by ATSB and Boeing. I observed it (APU auto start) in all my Nov 2, 2014 simulations. After MEFE, there is more than enough fuel in the line to power the APU for up to 13 minutes…but at the very least 3 minutes… which is enough to explain the BFO and BTO data we do have at 00:19, and lack of IFE Logon data at 00:21.
@Nederland
Yes maybe it was mistake the SATCOM got powered at the end, or maybe someone was playing with us.
@Victor
Thank you for clarification.
I think 0:19 was an incomplete log on, does that change anything?.
How much time do you think would pass between the messages at 0:19 or what would be the exact sequence?
I’d say it’s more logical that a pilot who perhaps had the intention to hide the plane/evidence was concerned that (3) SATCOM DATALINK could give away his position still after so many hours of getting away from the intended destination. And that this could cause a change of plans. That means recover and glide to get further away from the possible zone of detection rather than continue the steep descent downwards and end close to that zone.
For whatever reason the pilot had decided to go online again at 18:25 no doubt remains a mystery.
But I think he was obviously not very concerned about this, perhaps because he was planning to continue to fly for a few more hours (with or without destination).
@airlandseaman
Say, if you had asked a pilot BEFORE MH370: “Will the SATCOM reconnect in case you run out of fuel”
would his answer have been:
It is virtually guaranteed that the the AES will reboot following main engine fuel exhaustion (MEFE). It is a natural and predictable event, caused by the momentary loss of Left Main AC Bus 115VAC power (to the AES).
I’d doubt that. I thought most pilots were unaware how to shut down an SDU as this is not part of normal training. It is always easy to find out these things after they had occurred.
Also, it is not entirely clear to me that the crash in the SIO was the intended aim of the diversion, so I wouldn’t necessarily presume pre-planning for that event.
Or it could have been all intentional to obfuscate the search as @TBill thinks it is possible. If you assume that degree of planning.
@Nederland: It can be confusing, but when the EICAS message for a system appears, it means the system is having problems. So messages (1), (2), and (3) all indicate problems. When (3) appears, the pilot can be assured that an ACARS message will NOT reveal his position.
@Victor
I think the pilot turned off ACARS early in the flight, so he never worried about that.
Nevertheless, you would think that a SATCOM connection (log on) that occurred accidentally tells the operator something about location (like distance to satellite).
Better safe than sorry.
Nederland: The AES logon at 00:19 was not incomplete. It was in fact a complete and successful, normal logon. The only thing that was not complete was the subsequent IFE logon expected at ~00:21. That did not happen at all, probably due to impact prior to that time.
There is zero evidence the pilot flying had any awareness the restoration of power to the left AC bus would cause the AES to logon again at 18:25 (or 00:19). The AES was only one of many loads on the left main AC bus, so it is very unlikely the left bus was de-powered to affect the operation of the AES. It is far more likely it was de-powered in connection with the decompression circa 17:21 to 18:23.
@airlandseaman
I don’t think the possible reasons for why the SDU was shut down/went on first time are very important to understand the end of flight.
The message came up on the screen, and I think there was some reasonable apprehension that this could give away some positional clues.
The IFE could also have been shut off manually from the cockpit. In fact, this seems to be a reasonable possibility if the aim was to not allow passenger ground communication.
@Nederland said: I thought most pilots were unaware how to shut down an SDU as this is not part of normal training.
Don’t believe that poppycock you read from somebody that thinks the plane is buried at Baikonur in Kazakhstan. First, a B777 pilot might not know what an SDU is, but he or she would be very familiar with the SATCOM (of which the SDU is one subsystem). That the SATCOM is unpowered if the IDGs are lost is stated in the FCOM. Also, in the PMDG 777 simulator (which the captain installed on his home computer), isolating the left bus will produce the three EICAS messages related to problems with the SATCOM. Whether or not the pilot isolated the left bus to depower the SATCOM, that is certainly a possibility.
@Victor
Does the simulator also show that SATCOM comes back on after running out of fuel?
@Nederland: No. With no fuel in the left tank, the APU does not start.
But the SATCOM does come back on after MEFE in the level D simulator. The fuel in the APU line powers the APU for several minutes after MRFE.
@airlandseaman
Not sure if anyone would want to practice things like these on a work simulator and leave a lot of data for investigators to evaluate…
@airlandseaman: In some Level D simulators, the fuel in the line to the APU is not modeled. Boeing claims it is not modeled in the engineering simulator they used for the end-of-flight studies. There were also engine re-starts in the simulations you observed. This also did not occur in the Boeing simulations.
@Nederland: I should add that the PMDG 777 simulator would be a poor choice to model what occurs after fuel exhaustion. For instance, in that model, at high enough airspeeds, the engine speed from windmilling was sufficient for the IDGs and backup generators to supply bus power. The transition from NORMAL to SECONDARY flight control mode is also not properly modeled. The same for the automatic start up of the APU using the fuel in the supply line. I was able to use the simulator for my end-of-flight studies only by manually forcing certain systems to behave in the way I believe they actually do behave.
@ALSM
Wow, I always thought FS was a computer game. No sarcasm or disrespect intended, a sincere evaluation.
A serious and realistically accurate application, but a “game” nevertheless.
It seems that it actually replicates everything in great detail, if it even deals with aircraft behaviour in flame out or power out situations.
Impressive!
@TBill wrote “possibly, the RAT extended at IGARI (but I tend to prefer not so)”
If both Transfer Buses are isolated from supply, as you propose, there is no discretion for deployment of the RAT: it will happen.
Neither is there any discretion for release of the cabin passenger O2 masks. The overhead panel unlock relays are supplied off the Standby AC Bus, the failsafe supply for the AC Standby Bus is the main battery via a DC-AC inverter.
@Nederland,
As Victor has described, SATCOM effects are notified on the EICAS. In the case of the short term power recovery following loss of engine driven generation, there will be many more messages than just those related to SATCOM scrolling up the EICAS display.
The SATCOM system is not something that is unknown to 777 crews. The VOICE and DATA functions it provides to the Flight Deck, and the related EICAS messages, are well described in the Flight Crew Operating Manual.
@ArthurC: Mike was describing the simulations on a Level D simulator used by a major airline with B777s. That’s certainly not a game.
As for MSFS just being a game, it is far more than that. Essentially, the PMDG 777 add-on uses the B777 FCOM is its design specification, and the FCOM is supplied as the “user’s guide” for the software. Of course it does not have the fidelity of a Level D simulator, but if you understand its limitations and use the tool appropriately, it can do a superb job in modeling aspects of a flight.
Re Cocos Keeling Islands:
Would anyone know if Cocos Island airport would have been available at night for emergency landing around 7/8 March 2014?
Another question: is/was there a radar facility around the airport? I have been looking with google maps and street view but haven’t been able to find one.
Thanks, Don, no more questions at the moment
Victor Iannello: “@TBill: To follow up on @Don Thompson’s comment, I can’t imagine that any pilot would choose to fly an hour on RAT power, if that’s what you are asking. It is possible that the CVR was unpowered by isolating the left main and transfer busses by flipping the bus tie, the IDG, and the backup generator switches, leaving the right busses (main and transfer) functional. This would keep the flight control mode as NORMAL and also allow the autopilot to be engaged.”
Ok, but can the pilot be reasonably expected to know this?
re: Hypoxia Physics/Physiology Question
According to The Atlantic Magazine (WILLIAM LANGEWIESCHE):
“None of those cabin masks was intended for more than about 15 minutes of use during emergency descents to altitudes below 13,000 feet; they would have been of no value at all cruising at 40,000 feet. The cabin occupants would have become incapacitated within a couple of minutes, … ”
Thus the following re-consideration (numbo jumbo) :-
What is the [practical] difference between a FL350-hypoxia and a, say, FL420-hypoxia?
Is it comparable to the difference between :-
a. A 35-floor and a 42-floor ‘jump down’ (free fall),
b. A fifth and a sixth (*1/7),
c. A 2.5th and a 3rd (*1/2),
d. And so on … ?
[Especially if the ‘jump down’ (to ground) actually started before the ‘climb up’ (to higher floors), so to speak. ]
If not much difference, what is the [real] purpose of “the climb”, if any?
@Niels
RE: “Would anyone know if Cocos Island airport would have been available at night for emergency landing around 7/8 March 2014?”
Put it this way, I don’t know of any reason why it wouldn’t have been available. It’s an ‘uncontrolled’ aerodrome (in the ATC sense), with pilot activated lighting and instrument approaches to runways 15/33.
RE: … is/was there a radar facility around the airport? I have been looking with google maps and street view but haven’t been able to find one.”
There is no ATC radar at Cocos Island. A radar was installed at Christmas Island in 2011 as part of an Australian DSTO initiative. That radar was intended for maritime surveillance, primarily to detect small boats used by illegal immigrants (https://www.securityinformed.com/news/co-10726-ga.12678.html). I don’t know if it was still operating in 2014. As far as I’m aware, the only other radar asset that provided coverage of the area was Australia’s JORN, operated by the Royal Australian Air Force. However, JORN does not operate continuously in peacetime and the RAAF claimed it was not operating the night MH370 disappeared.
@Peter Norton
RE: “Ok, but can the pilot be reasonably expected to know this?”
Most B777 pilots would not know the power source for the CVR as it is not mentioned in the manuals that pilots normally use and it is not covered during training. Nevertheless, the information is accessible if a pilot chooses to do some background research. Having discovered the power source, a B777 pilot should have enough systems knowledge to de-power the right-side electrical buses. The ramifications of doing so should also be apparent to any pilot who chooses to do a bit of research.
@Niels
Re Cocos Keeling Islands:
Would anyone know if Cocos Island airport would have been available at night for emergency landing around 7/8 March 2014 ?
One could only assume yes, in the sense that the pilot can activate runway lighting by PAL on 118.1Mhz, but there is no tower or radar or ATIS.
Ground services are provided by TOLL, see:
http://christmasislandairport.com.au/wp-content/uploads/2017/10/REM-O-AIR-FOR-IOT-047-Airport-Fees-and-Charges.pdf
See the AIP below.
https://www.crc.id.au/xplane/charts/ERSA-2019-MAY-23/Cocos%20(Keeling)%20Island%20(YPCC)%20FAC.pdf
Note:
“All inbound and outbound ACFT arebrequired to activate RWY LGT by PAL + AFRU 118.1 to suspend use of RWS for non aviation activities and to allow personnel to vacate RWS.
As for the “non aviation activities”- the video in the link below is worth a look.
https://www.abc.net.au/news/2019-06-23/cocos-islands-golf-course-on-international-runway/11222500
thanks Andrew
@drB
@Richard
@Victor
(and All),
May I please “rephrase” your proposed means of determination of likely or potential areas (Regions Of Interest) for future search or re-search for the remains of MH370 so that I may then ask some questions.
1. You propose construct of a multi-dimensional matrix.
2. You limit that matrix to “arcs” 2 through 6 to so that end effects are possibly minimised in the analysis.
3. Please note that (as I see it) the arcs are simply one dimension of the matrix.
4.You chose to include Arc 6 within the matrix.
5. Arc 7 was not included in the matrix due to it being clearly and distinctly different to the previous arcs as evidence points to it being part of the final descent and thus not part of the previous flight southwards, or generally southwards, to somewhere above the Southern Indian Ocean.
6. It would be possible to also limit the matrix to within the bounds of only Arcs 2 through 5 if it was argued that potentially Arc 6 may also be part of the final descent, even if only at the start of that descent.
7. The use of the matrix is to define a number (a large number) of possible paths generally southward which would define a potential path for MH370.
8. To limit one dimension to a reasonable definition you have limited the “actual” path to a singular path started prior to Arc 2 and uninterrupted until Main Engine Fuel Exhaustion. This dimension by this limitation becomes the navigational path mode.
9. Note that the “singular” path mentioned above in 8. is assumed to be uninterrupted as mentioned above.
10. As mentioned above in 6. it would be possible to limit the matrix to within the bounds of only Arcs 2 through 5 to eliminate any questions, if any, that Main Engine Fuel Exhaustion may have occurred prior to Arc 6.
11. It is theoretically conceivable that an alternate path or alternate paths other than a singular uninterrupted path could be added to the matrix provided that such alternate path or paths were mathematically definable. For example, a flight towards a possible land destination subsequently followed by another generally southwards could be added if such a path was reasonably proposed. Note the use of “theoretically conceivable”. This would be extension into another dimension, as I understand it. This is the dimension referred to above in 8. as the the dimension limited “to a reasonable definition”.
AND, Finally: (I almost forgot):
12. For each possible path through the matrix given mathematical constraints upon the possible values, or known values, for each dimension at each Arc Point along the aircraft flight path, THEN the derived theoretical values of the expected BTO (Burst Time Offset) from the satellite communications to and from the aircraft are compared to those actually recorderd by Inmarsat. This comparison thus determines the likelihood, or otherwise that this point in the matrix is a point of the actual flight path. Similarly the BFO (Burst Frequency Offset) values are analysed, or compared.
13. Concerning “possible values, or known values” as mentioned above in 12. :-
A: The time at each Arc crossing is a known value. Although, re-reading your method summary, it may appear that you have included this as a general variable. I suspect that the values for this dimension are limited to the known recorded times.
B: You have used the initial bearing (at the time of crossing Arc 2) as another dimension. You have systematically and incrementally “scanned” this variable or dimension between an reasonable set of limits. You have chosen 155 degrees True through to 195 degrees True as the reasonable range, or set of limits.
C: At subsequent arc crossings you have updated the aircraft or flight bearing dependent upon the Lateral Navigation Method.
D: Other variables or dimensions are similarly systematically and incrementally “scanned” and updated as the ‘flight” progresses, resulting in a set of systematic and incremental flight paths as defined by elements of the matrix.
Questions:
Q1: For presentation purposes, specifically to aid in comprehension, are the “solutions” or the set of flight paths easily broken down into sets of (say) Extremely Unlikely, Possible, Probable, Likely, Most likely ? For example, my chosen variable, or dimension, above in 13.B., being initial bearing, might be a simple case. I suspect that your results (set of solutions or flight paths) for this parameter may be very distinct. Or there may be one distinct peak in likely results, perhaps even two or three peaks. For example, I would suggest that the likelyhood of a 155 degree result is minimal, in consideration of all the other parameters which contribute to the potential solution likelihood, and thus would be relatively classifiable.
Perhaps a two dimensional graph for this parameter, variable, dimension, alone, may assist in comprehension.
Similarly, other parameters, such as Flight Level or Speed Control Mode may have clear peaks ?
Q2: You may or may not have already said this earlier. If so, please accept my apologies for asking now. You have already determined and/or declared that the BFO results can be “ignored” and utilising the BTO results alone leads to the same solution as when the BFO results are included in the analysis. Have you also constructed an analysis of only Arc 2 through Arc 5 and how conclusive is this ?
mash: The climb after IGARI was from 37200 feet (FL350) to ~40000 ft. The difference in UTOC, as you suggest, is not much. In either case, OTOO 1 minute, after complete decompression…maybe 2-3 minutes if the constant flow masks were used. So, while the climb would decrease the time by a few seconds, it is unlikely that was the main reason for the climb. The stepped speed profile approaching KB (increasing in 3 steps from 460 at 17:31 to 530 kts at 17:38) suggests the altitude was higher than 40,000 at the top of the turn, and the PF was seeking to find the optimum altitude to maximize the ground speed.
@Andrew, Ventus45
Thank you for your explanations about Cocos Keeling airport. @Ventus45: the video indeed is clarifying regarding non-aviation activities; the atmosphere at the islands seems rather laid back.
The reason I’m interested is that my MH370 flight path calculation results typically indicate a settling of fixed cruise conditions in the 21:00 – 22:00 time window, in the vicinity of Cocos Keeling.
Two more thoughts on the end of flight scenario:
Leaving aside the flaperon for now (I have yet to hear of a reason why the lower third of the trailing edge came off if not on impact with water: eaten by a shark?, bumped into a goldfish?, same for the outboard flap)
then we still have the other ~30 pieces mentioned in the Debris Examination Report.
Obviously, these are badly damaged. But do they really look like parts of an aircraft that came down with such high speed that it completely disintegrated on impact? Such debris is shown in the Silk Air 185 report, 229-232, figure 8a-h. Maybe some, but not all.
One could therefore hypothetise that some came off in flight, others on impact. But description of the damage is almost always the same along the line: tension damage/pulled off, core of structure not crushed, fractured along the side. To me, this does indicate that they separated because of a one-off event (suddenly on impact) rather than due to aerodynamic overload (slowly/gradually); and that the impact was not as violent as in the case of Silk Air (no core/crush damage).
Take for example item #22 (above, p. 52-7), the vertical stabiliser. This appears to be the only item that is squashed internally, probably due to the impact with water (it did not come off in flight), although it would be the part best protected. On the other hand, aircraft parts, like the right fan cowl (#6, p. 1-4) show no (signifcant) crush damage on the core and can obviously not have separated in flight either.
The third interim report therefore came to the conclusion: Recovery of the cabin interior debris suggests that the aircraft was likely to have broken up. However, there is insufficient information to determine if the aircraft broke up in the air or during impact with the ocean.
To me, this sounds more like all recovered parts broke up at the same time, when the entire aircraft broke up, rather than that some came off in flight, others on impact.
Nederland wrote: “I have yet to hear of a reason why the lower third of the trailing edge came off [of the flaperon] if not on impact with water: eaten by a shark?, bumped into a goldfish?, same for the outboard flap”
What a ridiculous, 100% false statement. The subject has been discussed in depth for the last 4 years by scientists, engineers and others, here and elsewhere. It has been addressed by ATSB and the French. I published the first paper on the subject only 2 days after the flaperon was found 4 years ago. You are free to disagree with the assessment, but to state “I have yet to hear of a reason…” is pure fake news. http://bit.ly/2DKBxuf
@airlandseaman
Thanks for your reply.
I have to say I can’t remember all drop box files, posted 4 years ago, but I had repeatedly asked in the above about the reasons why that part came off.
Also I’m afraid I can’t open your file.
From the French report I could only find the information that it came off on impact with water. I can’t remember an ATSB report on this, as this was part of the French, not the ATSB investigation.
I’d thereful be grateful if you could point me to those reports (French/ATSB).
Thank you in advance.
@Victor
Victor Iannello: “@TBill: To follow up on @Don Thompson’s comment, I can’t imagine that any pilot would choose to fly an hour on RAT power..”
How about just no AutoPilot to Penang or even less time? Right now I agree with you that A/P was probably back on by Penang. I am suggesting proactive actions to obfuscate the intentional nature of the apparent intentional depressurization near IGARI. I have cited various possible ways to do that, but temporarily or permanently cutting off DFDR power from cockpit or MEC Bay is one possible technique.
I would not automatically rule out flying after IGARI with RAT deployed, but it is certainly untidy based on our current assumptions saying pilot wanted a completely normal aircraft to fly for 7+ hours. If you say BFO values were off by a constant 10 units (say due to upsets and 18:25 restart) there might be an argument for a slow curved path roughly ISBIX to 22 South…not sure how the N571 OFFSET looks if BFO is +10.
@mash
The greatest unknown in the hypoxia severity is cabin altitude, because it takes a while to get all the pressure out of the aircraft. I presume if the pilot was being deliberate/fast he would cut bleed air and open outflow valves. That would probably be fast, but that’s a weakness of MS flight sim programs, in my experience they show depressurization being fairly slow. If you could really get the air out fast, then at FL400 you probably could get to a point of rapid loss of consciousness depite O2 masks.
@Nederland
In addition to what Victor said, I never say the word “SDU” anymore. Instead I say “SATCOM” which is the actual terminology. This because JW says pilots do not know the “SDU” exists…but that is word-play, because pilots do know all about the “SATCOM”.
As far as your idea the pilot not knowing his specific nefarious destination, that is of course possible but it seems many experienced pilot authors (Ed Baker, William L., Ewan Wilson, ALSM) feel the facts point logically to intentional depressuring at IGARI. The purpose of that action would presumably be to allow the planned mission to continue without interruption. I am certainly open to the negotiation theory, but it seems most likely any negotiation was over by the ZS cell phone call on the KLIA 32R runway.
The link works fine for me. Here is a new link: http://bit.ly/2PdLoe6
You should also read this: http://bit.ly/2XYJCqA
@TBill
I entirely agree that pilots generally know about SATCOM. I think that pilots would not normally know that SATCOM would come online if the aircraft runs out of fuel. Not even a high end simulator (like the ones used by MAS) seems to accurately show that.
It would certainly be somehow possible to get this information in advance if one looks very closely into this. But it is obviously not guaranteed if the MH370 pilot did this. Even if he did, he could have missed that detail.
(If he looked into these details so accurately, then he may deliberately have mislead with a possible steep descent, followed by a glide.)
@airlandseaman
Again, thank you.
Your conclusion at the time:
Part of the flaperon along the trailing edge is missing and the edge is ragged (looks to be “torn”, not broken off due to bending
This is the exact opposite of what the French DGA wrote:
The damage being greater on the trailing edge on the inboard side, notably on the lower surface side, it appears that the contact occurred first in this zone. The loads generated, pushing from the lower surface towards the upper surface locally (unlike uniform aerodynamic loading), resulted in a bending load from the rear towards the front as well as of inboard towards outboard. This caused torsion on the flaperon. etc
I am aware of the tail strike hypothesis in the file by Kenyon. At the very least, this is an added assumption. If viewed in combination with the trailing edge damage on the outboard flap, it would be an amazing coincident if both hit the tail of the aircraft, and that latter kind of damage does really not look like a tailstrike.
I apologise for the silly wording in the above and I appreciate that this is a sensitive topic, but I have to say that I would give more weight to the DGA analysis who have personally inspected that part, and this is a government body. As far as I’m aware the ATSB has never stated anything to the contrary either in publication or press statements.
Nederland: OK. I’ll take that as an admission your statement above (“I have yet to hear of a reason why the lower third of the trailing edge came off …”) was not true.
The French flaperon analysis is flawed in several aspects. I won’t repeat all of it again.
@Nederland
Not sure you noticed you got an indirect response from @Gybreght on JW. if we look at the Boeing simulations, we could infer crash severity for a more level flying crash scenario, and I am thinking it can be quite severe depending on vertical and horizontal speed at water impect. Obviously the internal debris seat monitor frame and bulkhead semi-definitely disprove a Sully-style soft landing. But those debris items could possibly be explained by a notch more severe (ie flaps up fast glide).
It is generally believed that IFE would reboot automatically even if the pilot had it turned off for the PAX. So for loss of IFE at end of flight reboot, I am rusty, but I think we have to invoke fast crash pulling breakers in the MEC Bay. The other reason for pulling the IFE breakers in my view is possibly to prevent the IFE flight computer from recording info such as flight path.
@TBill
Thank you for pointing me to the Boeing simulations.
On the IFE, in the ATSB report, p. 10 one assumption was: The fact that the expected IFE system transmission was not received could be due to: • the IFE system being selected off from the cockpit overhead panel at some point after the 18:25 logon
They also point to the possibility of an unusual aircraft attitude. So, it’s not just that the plan crashed (according to this report).
@airlandseaman
I was simply saying that I repeatedly asked for a reason why the trailing edge broke apart.
If the reason for the missing IFE logon was due to an inverted aircraft, clearly it was within seconds of impact.
True enough, but the possibility that the IFE was switched off seems plausible to me.
@TBill: If you want to interact with Gysbreght, do it elsewhere, but not here. There was a reason he was banned from this blog.
@All: Here’s a really interesting video showing Apollo 11’s descent and landing on the moon. The annotations are great.
https://www.youtube.com/watch?v=RONIax0_1ec
@Victor
Thanks for the video. It was a stunning achievement, especially given the technology of that era. I was 6-years old at the time and remember being glued to the television as it all unfolded.
@Victor. Gripping. Aldrin had a lot to do.
@airlandseaman
Thank you for the reply – so there is not much difference … for “the climb”.
But then another possible question is:
What is the (practical) purpose of the accelerations if it is not the ‘shortest distance’ path [to ‘escape’], assuming the detour around Penang is just a waste of time?
[… without concluding prematurely that all these ‘meaningless’ moves is just a big deception show, say to create the impression of an emergency return/landing (at the ‘first’/’contingency’ stage), assuming all planned. And perhaps consequently to challenge the “decompression” theory, and so on … ]
Re speed steps at KB: I’m not sure if I ever posted the final results from my KB PSR analysis that show the speed steps. So, here is one example assuming the altitude is 40,000 ft. As in the past, adjusting the assumed altitude moves the CoS average (single dot here) higher or lower. 40,000 is a good fit to the speeds before and after the CoS.
Paul’s azimuth smoothing idea turned out to be the key to removing most of the radar position noise, which cleaned up the instantaneous speeds a lot. It makes the speed steps very obvious. http://bit.ly/2M2mbFu
@Nederland
“To me, this does indicate that they separated because of a one-off event (suddenly on impact) rather than due to aerodynamic overload (slowly/gradually)”
This statement suggests that you are not familiar with how sudden and catastrophic aerodynamic flutter can be.
I suggested, in a post days after the flaperon was found, that flutter could explain the TE damage. Note that the TE separated along the line of fastenings which attach the top and bottom skins to the rear spar. There is no other internal structure to the rear of that spar. This is also the line of maximum bending moment, i.e. maximum stress in the skins, in the event of flutter. It’s the place that I would expect the separation to occur.
There are a number of factors which can contribute to flutter occurring, not just the aircraft speed. Any play in the flaperon attachment points and linkages, inevitable as the airframe ages, will increase the possibility. What state were the actuators in at this point, and will they provide any damping?
The onset of flutter can be very rapid, and within a couple of seconds the oscillations can reach destructive amplitudes and loads. I suggest that the TE damage could easily occur within 10 seconds, with simultaneous over-stressing of hinges and linkages, followed very rapidly by the departure of the remainder of the flaperon.
If you doubt this, have a read of the reports of the Reno P51 accident in 2011, and other examples.
Note too, that the B777 FCOM makes reference to the possibility of flaperon flutter while testing engines on the ground.
Thanks, Brian
My quote was in relation to the other ~30 parts. It looked more reasonable at that time to conclude that the flaperon came off because of flutter. Yes, 10 seconds could be right, that is still a marked difference from a sudden event at impact, and I believe the DAG is able to tell that difference.
If the line where the trailing edge broke is the most vulnerable, then it is still the most vunerable if it broke on impact.
The Reno P51 (‘Gallopping Ghost’) accident was an airshow gone wrong? Involving a modified WW II military jet? (During these events, the vertical acceleration peaked at 17.3 G … The accident airplane had undergone many structural and flight control modifications that were undocumented and for which no flight testing or analysis had been performed to assess their effects on the airplane’s structural strength)
@Don Thompson. Since the Boeing simulations take no account of the effects of APU start or of relight attempts, that suggests the data on level D simulators that do are not accurate enough for Boeing and begs the question as to where that data came from for others. For example, the availability of left tank residual fuel to the APU has been established by Boeing only since the crash.
I assume that manufacturers of airline simulators would write their own software but if Boeing cannot simulate APU starts and relights what does that say about the fidelity of those that can for pilot training? Is it that their accuracy requirements are less? In that case they may be accurate enough for end of flight analysis here? If so, why would Boeing not have used one of these for their simulations?
Assuming there to be accuracy requirements generated by the simulator industry or a regulatory body, such that airline simulators yield a common and sufficiently accurate outcome for like aircraft configurations, can you throw any light on whether they provide reliable answers for our purposes here when Boeing declines to use them?
@Dr B. Adoption of the ‘alternate’ electrical generator loading configuration, whereby the SDU/SATCOM re-boot initiation would occur at right engine failure, would result in;
• a range reduction so shift north of the 7th arc crossing if right engine fuel quantity remains as in your modelling,
• a slowing of speed to match 7th arc timing over the shorter distance and,
• a maintenance of that speed until re-boot initiation, whereas in the ‘normal’ configuration there is a drop from its higher speed after that failure.
That loading configuration offers a higher possibility of meeting BFO descent criteria.
I think you commented on this before to the effect that this falls within PDA tolerances; though the change to usable fuel and time over the last leg do now look to be substantial. In effect some 580 kg of residual left engine fuel is foregone and the speed of the last leg would need to reduce by some 10 minutes as I understand it, the time between engine failures. There would be lower speed and less time between arcs generally but also less distance.
There would be some small iteration with the effect of reduced speed on fuel consumption also.
Should an increased electrical load have been carried by the right engine for some time, that would reduce its fuel, amplifying the first two dot point effects above.
If not swept up by tolerances, conceivably there might be another persuasive course solution that would accommodate this change to assumptions?
Should it be that it does fall within tolerances, the crash site might be expressed as a band along the arc rather than a point?
David: Re: “Since the Boeing simulations take no account of the effects of APU start or of relight attempts, that suggests the data on level D simulators that do are not accurate enough for Boeing and begs the question as to where that data came from for others. For example, the availability of left tank residual fuel to the APU has been established by Boeing only since the crash.” This is nonsense. The level d full motion sim we used is incredibly accurate. The “data” comes from a high resolution dynamic math model that remains very accurate up to the point of speeds very close to mach 1. The APU auto start function was accurately modelled. Stop trying to explain away results you don’t like by making totally unfounded assumptions about the fidelity of the level d sim.
@Nederland,
Yes, Galloping Ghost was an accident waiting to happen, but I reference it only to illustrate how quickly flutter can develop, and how catastrophic the result. In this case the trim tab was torn off within a second or two of the flutter developing.
Guarding against flutter, especially of moving surfaces, such as ailerons and elevator and rudder, is the reason for critically balancing these surfaces. Improper balance, play in hinges and linkages etc will increase the possibility of flutter occurring. Even in a surface as large as the flaperon it still would not be surprising, with flutter, to have an oscillating frequency of say 10 to 15 Hz with diverging amplitude. Catastrophic.
@ALSM. If so accurate why Boeing not use it?
Please be more open minded.
@ALSM, @David: I’ve also found it odd that the simulations on the airline simulator included behavior (engine relight, APU auto-start) that were not included in the Boeing simulator.
I remain suspicious of the fidelity of ALL the Level D simulators in their ability to accurately model behaviors after fuel exhaustion with no pilot in the loop. Some of the limitations of the Boeing simulator are known. While the airline simulator included effects that were not in the Boeing simulator, it too had some unexplained anomalies. For instance, for the case in which two engines reached fuel exhaustion at the same time, the relight of the left engine caused a very steep bank to the right (as much as 55 deg) and a rapid increase in descent rate. Then, for some unexplained reason, the wings suddenly leveled, which arrested the rapid descent. @Andrew also observed an anomaly using his company’s simulator in which the left throttle did not fully advance (without his input) after the right engine reached fuel exhaustion.
After reviewing all the simulations, my main takeaway is that if the aircraft reaches an increasingly steep descent (downward acceleration of 0.67g) as suggested by the final BFOs, and there are no pilot inputs, then the aircraft is banked and will impact the sea not far (<10 NM) from that point. On the other hand, a pilot may provide nose-down inputs to cause the same downward acceleration with level wings. With no recovery, the aircraft will again impact the sea not far (<10 NM) from that point. It is possible that the pilot executed a dive-glide-dive maneuver, which would satisfy the BFO evidence and the debris evidence, although that would be a strange sequence.
David: The Boeing engineers used an engineering tool (with limitations), not a full motion, high fidelity training simulator. You will have to ask them why. Probably because of the large number of sims they conducted, and the convenience of the engineering simulator to their work. Your pure speculation that they did it because the engineering simulator was superior is baseless nonsense. It is worth noting that Paul Matson (777 pilot that arranged for the UAL sim time) was well aware that the APU would start automatically from his years of training.
Don: Please inject some factual information into this conversation.
It should be noted that, regardless of simulations, Boeing informed us that the 777 APU is designed to auto start when electrical power is lost. Thus, fhe simulations were consistent with what should be expected. Why, then, not trust the sim’s?
@airlandseaman: We know that engine relights and an APU autostart occurs after fuel exhaustion. I’m just curious why Boeing chose to use a simulator which did not model these known effects, regardless of whether or not the simulator was full motion (which is not required if there are no pilot inputs).
In the simulation you witnessed with the double fuel exhaustion, the rapid wing leveling after the left engine relight (and steep bank to the right) remains unexplained. My guess is it’s a simulator error or unintended simulator configuration.
Victor:
I know the restart anomaly you are referring to, and we discussed it in real time. The trainer that was controlling the simulator was also puzzled. It looked to us like the computer reset the simulation due to encountering some unexpected state. But let’s be clear. That anomaly was not a common event in the 4 hours of sim’s we conducted, and importantly, when it did occur, it was obviously a computer glitch, not a simulation of how things really work. You have seen all the videos. You should be able to attest to the realistic behavior of nearly everything in those sim’s.
@airlandseaman: I focus on the engine relight because it is an event that can explain the downward acceleration level and timing suggested by the final two BFOs, and also it is behavior not modeled by the Boeing simulations. It is unfortunate that a glitch occurred which leveled the wings, because I think that this simulation would have clearly shown that the crash occurred soon after and not far from the position of the final log-on acknowledge.
Victor:
The engine relight attempts are designed in to the 777 computer algorithms, thus normal. Success depends on accessible residual fuel. There were other engine relight attempts in the simulations that did not cause a glitch. I can’t recall now if any of the others were momentarily successful, as in the case of the one associated with the glitch.
Anyway, in the simulator, successful relight attempts were far less common than momentarily successful attempts. After all, they are only intended to help out when fuel is available, and some other problem caused the flame outs (like heavy rain, hail, etc.). In the case of MH370, it is more likely than not that there was not a successful attempt. Either way, the result would still be impact near the 7th arc.
@David
The requirements of airline training simulators are defined by the Code of Federal Regulations, Title 14, Part 60 (and equivalent regulations set out by national regulators). While we typically use the term ‘level D’ to qualify the fidelity of a Full Flight Simulator (FFS), the core requirements for a Level D FFS enhance visual and motion cues for the synthetic flight deck environment. The fidelity of a Part 60 FFS is demonstrated by replicating a real aicraft flight test program: provide the inputs, demonstrate the outputs conform. This involves systems, engines, flight dynamics, and so on.
The primary purpose of the FFS is to provide a testing environment in which all the training for published tasks and procedures can be tested in a realistic, yet synthetic, environment. A situation where the aircraft has no fuel would be a consequence of ignoring so many non-normal events, and reactive procedures, that the nuance of a few litres of fuel in a line is quite irrelevant.
An ‘iron bird’ engineering simulator is a different machine: importantly, it will use much original aircraft avionics, whereas a training device will use simulated panels, displays, emulate avionics in software, etc. The engineering rig may iterate the simulation at a higher rate than a FFS.
I think it very unlikely that an airline training simulator will deal with the situation where fuel dregs are scavenged from the left main tank and APU fuel line. Unlikely, also, that the engineering simulator would have demonstrated that nuance prior to March 2014. However, the engineering simulator should provide the capability to readily add conditions and parameters, given appropriate conditions and a timeline, so as to demonstrate what could be expected to occur in this example where an APU start is attempted when the L Main Tank is drained. But it will not do that on the basis of some real-time, first principles, computation of the volume of the main tank, the aircraft attitude, the suction of the APU inlet pump, etc, it will involve a model defined by some logic conditions and a timeline deduced by the relevant engineering team.
A Part 60 FFS must simulate a specific aircraft, the ATD docs will reference a real tail number (or numbers, where the FFS can support different configurations such as engine fit, e.g. RR, GE, PW). The UAL FFS experienced by ALSM was, I believe, a PW engined -200 series a/c. Any simulation tasks undertaken by the investigating team and their technical advisors would only be valid with R-R Trent engines. I have a recollection that the Trent 892 and PW4000 engines have differing auto-relight requirements. The Boeing engineering simulator would permit the appropriate customer configuration to be modelled. I have not had sight of specific detail for any of those tasks.
Further, to the remarks concerning electrical loading. The maximum avionics load is approximately 22kVA. While an IDG can deliver up to 120kVA. To reach anything approaching a 120kVA load one must assume that the galleys are operating, the IFE system, business class seats are moving, the demand driven electric hydraulic pumps, fuel pumps, and so on, are all operating.
Concerning the APU start.
The APU start is commanded as a consequence of both Transfer Buses losing power. While the engines may windmill, turn the accessory gearbox and the generator shafts, a generator control unit will de-energise its generator when the engines are ‘unlit’.
Just to dig into that…
@Don Thompson: I had forgotten that the airline simulations were for P&W engines.
Here’s what Boeing says about it’s simulations:
The simulations were completed in the manufacturer’s engineering simulator. The engineering simulator uses the same aerodynamic model as a Level D simulator used by the airlines. The simulator is not a full motion simulator but instead is used when a high level of system fidelity is required. The appropriate firmware and software applicable to the accident aircraft can be loaded.
…
The simulated scenarios do not represent all possible scenarios, nor do they represent the exact response of the accident aircraft. Rather, they provide an indication as to what response the accident aircraft may have exhibited in a particular scenario. As such, the results are treated with caution, and necessary error margins (or safety factors) should be added to the results.
It was not possible to simulate all likely scenario conditions due to the limitations of the simulator. Specifically, flight simulators are unable to accurately model the dynamics of the aircraft’s fuel tanks. In the simulator, when the fuel tank is empty, zero fuel is available to all systems fed from the tank. However, in a real aircraft, various aircraft attitudes may result in unusable fuel (usually below engine/APU inlets) becoming available to the fuel inlets for the APU/engines. If this resulted in APU start-up, it would re-energise the AC buses and some hydraulic systems. This could affect the trajectory of the aircraft. Similarly, the left and right engines may also briefly restart, affecting the trajectory.
@Nederland
I am thinking the ASTB comment that IFE reboot could be shut from cockpit switch is point later questioned here by the experts. The end flight sequence is very complex however. If active pilot option, and he saw the SATCOM came back on unexpectedly he could have fiddled with L BUS settings to turn it off again of course.
Regarding the simulator…
Manufacturer: Thomson
Model: 700-200
Year of manufacture: June 1997
Level: D
Configuration
AutoThrottle: Under control of FMS in ECON Mode.
CI=50
ZFW (Zero Fuel Weight): 395,000 lbs
Fuel at 1707 (ACARS reported): 96,500 lbs
Fuel at end of flight: 200-800 lbs per tank, depending on scenario
CG: 28%
Altitude: 35,000 (for most of the simulations)
TAS @ IGARI: 471 kts
Wind Velocity at 38S: 57 kts
Met Direction at 38S: 240 degrees (direction from which the wind is blowing)
Heading at 38S: 186 degrees
Track at 38S: 179 degrees
I cannot find a record of which engines were selected for the sim’s we conducted. UAL has GE and P&W engines in their fleet. (Two General Electric GE90 or two Pratt & Whitney PW4070/4090 turbofan engines). But the simulator is used to train pilots from dozens of airlines all around the world, so it is configurable for RR engines as well.
@Brian
I’m not arguing that in principle the lower end of the trailing edge could have come off because of flutter. But it sounds relatively implausible to me that the lower end broke up first, and then the whole thing, in both cases because of flutter. More importantly, I think the DGA can give a reasonable estimate on the damage from inspecting the flaperon, even without receiving full information on the material from Boeing. To my mind, this should not be easily dismissed because the final conclusion/hypothesis that the flaperon was deflected now seems wrong, with new evidence turning up later.
Also, am I correct to say that in case of #22 of the Debris Examination Report (vertical stabiliser), the outer skin looks relatively undamaged on the right hand side, but that the outer skin came off on the left hand side? (Or did they dismantle the whole thing, without saying so?) At least, the inner skin is severely fractured on the left hand side. To me, this indicates that the stabiliser fell flat on the water with its left hand side first. This would in turn mean that at least the tail section of the aircraft could have rotated to the left on impact, and did not disintegrate suddenly at very high speed.
Victor wrote:
It is possible that the pilot executed a dive-glide-dive maneuver, which would satisfy the BFO evidence and the debris evidence, although that would be a strange sequence.
I am of course not saying that the aim of a possible glide was to survive. The overall aim of the descent was probably the opposite. But one of the aims surely was to make sure that the aircraft is difficult to find. An unexpected APU start and the system coming online again could possibly be seen as detrimental to this latter aim.
@TBill
Another possible explanation for the lack of an IFE logon could be that the plane turned level again soon after the final transmission. That would rebalance the level of fuel left in the pipe, too. The APU could therefore have flamed out before the next handshake was to be expected. But again, I still haven’t seen evidence (or can not recall any) that overrides the clear statement in the ATSB report that you can switch off the IFE in the cockpit and this also means no IFE logon.
@TBill
IFE switch: with sight of the work instructions for the AD that implemented the P5 switch for IFE control we confirmed that the switch did not remove power from the MEC located components of the IFE system. It’s these components in the MEC that provide the comms functions. The AD was concerned with removing power from cabin located devices for safety reasons (IFE seat position equipment, bulkhead displays, powered seats, and so on).
Prior to implementation of that AD, the cabin crew/purser had an ability remove power from the seat position equipment using a switch at the purser station. Implementation of the AD gave control of power to ALL cabin located equipment from the flight compartment.
@ALSM
RE: ”I cannot find a record of which engines were selected for the sim’s we conducted.”
The EICAS display in the simulator videos shows that it was a PW-powered aircraft. The upper EICAS has EPR indications, which are only found on PW and RR powered aircraft. The lower EICAS has N2 indications, but no N3. That narrows it down further to a PW-powered aircraft.
Andrew: Thanks for those observations. I’ll add that to the configuration notes.
@Don
Do you also have clear confirmation that the IFE would still log on if it was switched off from the cockpit (against the ATSB statement)?
@Don Thompson
Are you saying that the IFE connection transmission expected at 00:21:06 UTC, should have occurred irrespective of the IFE switch position on P5?
In other words, the “P5 switch for IFE control did not remove power from the MEC located components of the IFE system. It’s these components in the MEC that provide the comms functions.”
This implies that MH370 crashed before 00:21:06 UTC.
This implies in turn, a steep descent after 00:19:37 UTC and not a long glide.
@Richard said: This implies that MH370 crashed before 00:21:06 UTC.
Or, the APU was out of fuel.
@Victor
Are you saying that MH370 recovered from the steep descent at 00:19:37 UTC and there was a long glide after the APU was out of fuel, using only the RAT?
@Nederland,
Is it not apparent that the debris fragment catalogued as Item 22 in the “Summary of Possible MH370 Debris Recovered” is a small piece of a starboard side panel of the vertical stabiliser, the fragment is the central part of the panel, the top and bottom having been torn/sheared/broken away? The damage could be due to bursting, tearing, torsion, but I can be very confident that the least likely cause is falling “flat on the water”.
@Don Thompson
“If both Transfer Buses are isolated from supply, as you propose, there is no discretion for deployment of the RAT: it will happen.”
You got me back in the cockpit.
No, I am not proposing what you say above. I am proposing at IGARI:
L GEN OFF
L TIE ISLN…cuts SATCOM
R GEN OFF
R XFER OFF
R TIE OFF…cuts DFDR
but….L XFER ON…prevents RAT deployment
APU ON or OFF (optional)
I recognize PMDG is not guaranteed accurate, but this is my proposal.
CVR could be handled later…I assume no absolute need to cut CVR on L XFER at IGARI, just DFDR for the next phase (intentional depressurization).
@Don
Sure, it is obvious that this is only part of the vertical stabiliser and came off from the rest. The observation was that it is badly damaged on the left side (the one you see on p. 53 of the pdf), and not very damaged on the right side (the one you see on p. 57).
Edit: the other way round of course, p. 53 and 55 show the right side, which looks not so bad, and p. 57 the left side, which looks bad.
@Richard: I’m not a fan of that scenario, because it suggests a dive-glide-dive, which seems pointless. I’m just saying if the APU ran out of fuel, it could explain the missing IFE log-on.
@Richard, and others.
I envisage three possibilities why the IFE connection was not initiated (it’s not a log on)
1) the APU’s fuel had expired before the interval to the IFE connex had passed;
2) had the APU continued to generate power, an extreme aircraft attitude caused loss of LOS to the satellite. Loss of link (a condition immediately unknown to the transmitter) implies a re-transmit or attempt to re-establish the datalink after a defined period;
3) the aircraft impacted the ocean before the interval to the IFE connex event had passed.
Two of three options suggest impact occurred within a very few minutes after 00:19.
IFE and power: the intent for removing IFE power is to “remove power
from the cabin systems if smoke or flames occur”. The intent is not to break the integrations between IFE and other cabin/passenger service systems, the integrations provided by the units located in the MEC.
@Nederland,
The vertical stab piece is a panel, it has an inner surface and an outer surface. The panel is not a consistent thickness across its span, that is not immediately evident from the images. The profile is flat on the outer face whereas contoured on the inner face. Review the description of items 9 and 15, the profile of the inner face of these (similar) panels is much clearer. It’s likely that the destructive force flexed the panel, stretching the inner face to fracture.
And to remind everyone, ATSB/Boeing reported virtually the same 00:21 IFE anomaly reasons Dec 3, 2015, to wit:
“The fact that the expected IFE system transmission was not received could be due to:
1. the IFE system being selected off from the cockpit overhead panel at some point after the 18:25 logon [now dismissed; cockpit switch does not stop the IFE logon, only power to seats]
2. the IFE and/or SDU unit losing power (APU flame-out)
3. the IFE and/or SDU becoming inoperative (due to impact with the water) before the connections could be set up
4. an unusual aircraft attitude breaking the line-of-sight to the satellite (aircraft transmission not received by satellite).”
So, #1 has been dismissed as incorrect, #2 is unlikely given 13 minutes of fuel in the APU line, #3 is the most likely, and #4 has the same implications as #2 as far as where to search.
NOTE: We also know the San Juan was missed the first pass.
Correction: “… #4 has the same implications as #2 as far as where to search….” should read “… #4 has the same implications as #3 as far as where to search….”.
@Andrew: You wrote a paper entitled “MH370 – The Left Engine Restart/APU Auto-start Problem”. In light of the current discussion, I wanted to re-read it, but the link no longer works. Can you please again make it available?
I appreciate there is a certain reason why a pilot can turn off the IFE from the cockpit, but I still don’t get why the IFE should necessarily log on, although turned off, when the SATCOM link alone works for data/messages, voice from the cockpit, and ACARS, and the in-flight entertainment system is of use just for the cabin/PAX.
@Victor
Try: MH370 – The Left Engine Restart/APU Auto-start Problem
Note the caveats in Section 6 regarding Mike’s simulator trials:
•The simulator modelled a B777-200ER with two-spool PW4090 engines. The PW engines are likely to have different relight and acceleration characteristics to the three-spool RR Trent engines on 9M-MRO.
• The RR Trent engine’s auto-relight function is disabled if the engine does not restart before the N3 runs down below 35%. However, the PW engine’s auto-relight function is not disabled unless the engine is shut down, which allows a much longer start time.
• The accuracy of the simulator systems modelling is unknown, especially in relation to the availability of residual fuel after the initial flameout.
That last caveat ties in with Don’s earlier comment:
“The primary purpose of the FFS is to provide a testing environment in which all the training for published tasks and procedures can be tested in a realistic, yet synthetic, environment. A situation where the aircraft has no fuel would be a consequence of ignoring so many non-normal events, and reactive procedures, that the nuance of a few litres of fuel in a line is quite irrelevant.”.
Simulators are training devices that are flight tested and certified to replicate the aircraft’s behaviour in certain scenarios required by the airlines and their regulators for pilot training and assessment purposes. The simulator standards required by the FAA’s AC 120-4B (Airplane Simulator Qualification) stipulate that (my emphasis):
“Simulator systems must simulate the applicable airplane system operation, both on the ground and in flight. Systems must be operative to the extent that normal, abnormal, and emergency operating procedures appropriate to the simulator application can be accomplished.”
Given the system design, we know that an APU autostart and/or engine relight might occur in the event of a flameout caused by fuel exhaustion. That scenario was indeed modelled by the simulator used in Mike’s trials, but it is not something that is typically required for pilot training or assessment. Consequently, there is no guarantee the behaviour was modelled with a high degree of fidelity.
@Don
#9 and 15 have in common with the other debris parts that their core is intact.
In case of #22 the outer skin (on the right) is basically intact, but the inner skin (towards the left) is badly fractured, which to me indicates that the force of impact came from left to right, pushing the inner towards the outer skin, and “squashing” the inner skin.
@airlandseaman
Many thanks for the reminder of the possible reasons that the IFE system transmission was not received.
The ATSB reports that the APU uses 2 lbs of fuel every 55 seconds under load. As you say, with 30 lbs of fuel remaining for the APU from the left tank, when the left engine flames out at around 00:17:30 UTC, this gives a nominal amount of fuel to operate the APU until 00:31:15 UTC. This gives a margin of over 10 minutes of APU operation beyond the time of the expected IFE system transmission.
The reason the IFE signal was not received when expected at 00:21:06 UTC can only be that MH370 crashed or the aircraft attitude was so unusual as to break the line of sight from the aircraft’s satellite antenna to the satellite.
I agree with your conclusion that either way, MH370 will be found relatively close to the 7th Arc at around 34.4°S.
If, during high speed descent, the wing broke off outboard of the engine thus releasing the flaperon already damaged by flutter and causing break-away of part of the flap also already damaged by flutter, would the subsequent descent profile of the main part of the aircraft then change from the descent prior to break-up ?
If so. would it be possible that the change in descent profile might lead to the impact being further away from the Arc than the nominal 25 NM ?
@Victor. You wrote, “I remain suspicious of the fidelity of ALL the Level D simulators in their ability to accurately model behaviors after fuel exhaustion with no pilot in the loop.” I join you in that.
As to the Boeing simulations these were blessed by the ATSB, SSWG, even with their limitations apparent. They must have had reason to do so if more suitable simulators had been available, so it seems likely that there weren’t.
In the First Principles Review there is the statement, “Results from recent simulations showed high rates of descent broadly consistent with the BFO analysis.” There is nowhere an explanation as to why the simulations conducted should be accepted, given their limitations, or why there was apparently no effort to overcome these.
The word “broadly” suggests subjectivity, bearing in mind that there are 3 requirements to meet the BFOs; speeds of descent, the average descent acceleration between them and timing. Though some descents match the BFO rates and acceleration, on the timing, none is consistent so far as I know. In which case ‘broadly consistent’ is misleading.
The most recent bunch of 10 simulations was conducted presumably because those earlier did not support the BFO-related descent. So other circumstances were simulated, though apparently still missing the jackpot.
This is not to say that with a larger sample including more of abnormal configuration and, as you say, with APU start and relights included the criteria could not be met broadly but no argument along those lines, complementary to the simulation results, was advanced by the ATSB.
There is the possibility that APU starts and relights might result in crashes further from the 7th arc than was evident in the simulations. As I understand it your judgement is that that is most unlikely. For my part I would note that even so, the number of simulations conducted is small and the outcome of a large sample, with APU start and relight, might see a few go far.
If so, the aircraft might have crashed beyond the extreme allowed for, based on simulations.
Potentially this raises the likelihood of the wreckage having been missed, even assuming there was no manned glide.
But then you go on to say that, “..if the aircraft reaches an increasingly steep descent (downward acceleration of 0.67g) as suggested by the final BFOs, and there are no pilot inputs, then the aircraft is banked and will impact the sea not far (<10 NM) from that point.”
In effect you are saying that if the BFO interpretations are sound, there need be no notice taken of the simulations. The trouble is that the simulations are there, extant, and as they stand, contrary to the BFO interpretation IMO.
Further, again on your observation that if APU start and relights were included that could well bring the simulations into line I think that is based on the United Airline outcomes reported by ALSM. We then return to the start point as to how representative they are of what the Boeing simulator would have disclosed had it been programmed satisfactorily.
I think it might be prudent, since the wreckage has not been found, to allow the possibility that search width should be wider than has been estimated.
@ALSM. About why the Boeing engineering simulator was used despite its shortcomings you think that was, “Probably because of the large number of sims they conducted, and the convenience of the engineering simulator to their work.” That would be a Boeing-centric approach though surely if there were better alternatives the ATSB or SSWG would have intervened?
I would indeed approach Boeing about it except that they did not respond to an earlier request of mine for information and anyway, as Honeywell explained to me, there are inhibitions to releasing information to foreigners.
You might have more success.
As to why Boeing used their engineering simulator you write that, “Your pure speculation that they did it because the engineering simulator was superior is baseless nonsense.” I would withdraw such a comment to that effect had I made it, though I didn’t.
@Andrew
Many thanks for your excellent paper entitled “MH370 – The Left Engine Restart / APU Auto-Start Problem”.
You describe 2 cases where a Left Engine Restart may have occurred using the remaining 30 lbs or 13.6 kg of fuel, (a) a successful restart to CLB thrust would require 14.7 kg of fuel, which is more than the available fuel and SDU would not reboot (b) a successful restart to an intermediate thrust would require 12.0 kg of fuel but the engine would deplete the remaining fuel before the SDU could complete its reboot sequence, which takes around 60 seconds.
In the MH370 flight path scenario described in the article above, the aircraft is assumed to be at FL390, which is way above the altitude supported by one engine operation, after the right engine flames out. The left engine will be increased to CLB thrust following the right engine flameout to try to maintain speed and altitude. If a left engine restart would have been successful, which is in line with your first case (a) above, the remaining fuel would have been depleted before the SDU reboot sequence could have started. Clearly, the left engine did not relight (as you mention, this is not surprising given the aircraft’s assumed altitude is well outside the demonstrated in-flight start envelope), the APU did come online and the SDU did reboot to provide the satellite logon request at 00:19:29UTC and logon acknowledge at 00:19:37 UTC.
@Don Thompson. Thank you for that informed response.
You say, “The fidelity of a Part 60 FFS is demonstrated by replicating a real aircraft flight test program……” My understanding then is that unless the inputs are taken from flight testing there will be no replication in a Level D FFS. I doubt that flight much beyond flight boundaries would be done other than by analysis (the 737 at high Mach required this and flutter calcs for the Silk Air investigation).
Flight testing of left fuel tank fuel exhaustion, right engine stopped might be too expensive and dangerous for the marginal gain foreseen and likewise spiralling high speed descents, high bank etc also I note your, “A situation where the aircraft has no fuel would be a consequence of ignoring so many non-normal events, and reactive procedures, that the nuance of a few litres of fuel in a line is quite irrelevant.”
So in the absence of such data, flight and conditions would not be simulated consistent with Part 60 requirements. Specifically you say, “I think it very unlikely that an airline training simulator will deal with the situation where fuel dregs are scavenged from the left main tank and APU fuel line.”
So what would account for ALSM’s experiences if inconsistent with Part 60?
You go on to imply that Boeing could have adapted the engineering simulator to suit had it wished or that had been requested and I assume that this would be outside Part 60 also; but at least the source data would be known, authoritative and the output qualified accordingly.
You say, “I have a recollection that the Trent 892 and PW4000 engines have differing auto-relight requirements.” That is mine too, the RR igniters firing when the engine speed drops below flight idle, the PW on flame out. Also the 3 spool response might be different to the 2.
@Richard
I agree with your conclusion that either way, MH370 will be found relatively close to the 7th Arc at around 34.4°S.
I don’t agree with your conclusion above for reasons I have already made clear. The 34.4S latitude is far from compelling, and the area close to the 7th arc has already been searched.
@DennisW
1. The MH370 end point at around 34.4S is valid even if, like you, one decides to ignore the BFO.
2. In light of the San Juan experience, you must admit it is possible to miss debris, in an underwater search.
@Richard
Please provide a link to the The MH370 end point at around 34.4S is valid even if, like you, one decides to ignore the BFO..
I must have missed it. I do agree that it is valid, but the possibility that the debris field was not found is low (~10%). Our disconnect has nothing to do with validity. It has everything to do with probability.
@Richard
BTW, I would not characterize my position as ignoring the BFO. It (BFO) is useful for knowing the plane went South and came down rapidly at fuel exhaustion.
The interpetation of the BFO data having a stationary variance is just plain wrong. You know, or should know, that the variance of a random walk increases as the square root of time (a proxy for the number of samples). Weighting the samples early in the flight the same as samples later in the flight under-estimates the variance later in the flight. One could (arm waving here) call your BFO variance an “average” variance. The variance at the end of the flight is at least 1.414 times your “average”.
In my view, the search should be continued North from 25S, to maximize the probability of finding the aircraft.
@Andrew: Thank you for access again to that excellent paper. There does not seem to be enough residual fuel for both an engine restart (producing thrust asymmetry) AND running the APU.
In addition to not knowing the position of the switches controlling the IDGs, BUGs, and bus ties, I also raise the following points:
1) If the fuel crossfeed valves were opened, it would shorten the time between the flameout of the right and left engines, and also make it difficult to determine which engine flamed out first.
2) If the left engine fails first and the left bus is automatically tied to the right, can we be certain that the break time does not cause a reboot of the SDU? The SATCOM is designed with enough internal bus capacitance to ride through a power interruption lasting 200 ms, but do we know what the actual break time would be for an in-flight transfer?
@all
Re: San Juan analogy-
MH370 was not like a submarine crawling along the ocean bottom getting stuck in a low spot. I have always hoped, that if we at least got in the ballpark of the MH370 debris field, we mnight find a piece or two that had some buoyancy and drifted a little. The 34.5 South area has been searched so many times, I already said Victor had 3 chances to be correct on that end point, and I think there might actually have been 4 times when OI went back to recover the lost AUV and rescanned again some areas. I finally got tired of telling Victor how many shots ghe had at it…of course at that time I was also very interested in 180 South, so I was not opposed to it.
@All: Don Thompson alerted me that the Ocean Infinity has found the French submarine Minerve, missing since January 1968. It was found in the Mediterranean Sea, about 30 miles from Toulon, at a dept of about 7,800 ft. That’s another feather in Ocean Infinity’s cap.
https://www.bbc.com/news/world-europe-49068823
@David,
You asked, “what would account for ALSM’s experiences if inconsistent with Part 60?”
As I wrote, the performance of an airline FFS must be demonstrated to comply with a baseline derived from a flight test program.
However, it’s typical that the simulator manufacturer must gain customer acceptance of the new FFS prior to regulator approval. During this phase the customer’s senior pilots will assess the simulator to ensure they are satisfied with its performance, customer requirements may exceed Part 60. Often, ‘snags’ outside the requirements of Part 60 will be highlighted and must be resolved to the satisfaction of the customer.
A Level D FFS is not the ideal tool for testing an MH370 end-of-flight scenario unless the underlying ‘model’ and implementation is fully understood. The manufacturer’s Engineering Simulator should provide a closer to ideal tool. From our vantage point, many unknowns stand for the detail of the evaluations/tests performed.
Now… I have some further thoughts for an uncontrolled end of flight scenario. The timings that have been set out for APU start, AES reboot from power interruption, are all ‘best case’. However, the AES Log On Request may not have been the first LOR burst transmitted by the AES, the GES can only record what it successfully receives and decodes. Had the AES transmitted a LOR prior 00:19:29, a finite delay is implied before its wait, for the Log On Confirm response, times out and a new LOR is transmitted. I am not suggesting that the 00:19:29 event is in doubt, rather that the interval from prior events may be longer, which potentially shifts the 00:19:29 event further into the sequence of an uncontrolled descent.
@TBill: Much of the seabed around the 34.3S arc crossing was scanned once, not three or four times, and some of the seabed that WAS scanned did not produce usable data due to terrain masking and steep slopes. You are much more certain of the quality of the data than I am. Is this based on solid analysis, or another hunch?
I make my statements about the possibility of having missed the debris field based on examining the bathymetry data and the SAS data from GO Phoenix, as well as conversations I’ve had with those that were responsible for analyzing the data during the search. In addition, Don Thompson is doing a much more detailed, quantitative analysis of all the data, and has shared some preliminary results.
@TBill wrote “the 34.5 South area has been searched so many times”
Please stick to facts: the area surveyed by the GO Phoenix/Phoenix International/SL Hydrospheric team was covered once with the ProSAS-60 towfish. Surprisingly few gaps/holidays were declared and, as a consequence, the area was given very little re-inspection by Fugro’s “Echo Surveyor” Hugin AUV.
I say ‘surprisingly few’ because the bathymetry isn’t significantly different to areas where Fugro worked, areas that were “riddled” with gaps/holidays that required re-survey by the “Echo Surveyor”.
Ocean Infinity’s work overlapped the edges of the ProSAS-60 area and made good on deficiencies in one particular reqion (S34.54, E93.85) but, the ProSAS-60 surveyed area has not been searched more than once.
Further to Victor’s comment, the Geoscience Australia archive of the Phase 2 search data includes source data as recorded during the seafloor surveys and post-processed data.
The post-processed data does include representation of the towfish survey lines in GIS compatible shapefiles, unfortunately, the shapefiles don’t include any Z, elevation, data.
I’m particularly interested in the towfish elevation as it progressed along its survey line. The source data, in a proprietary format, does include elevation: the towfish depth and its altitude off the seafloor. I have deduced the proprietary format and am presently sifting through and “cleansing” the millions of position records.
Towfish position was recorded at one second intervals during active survey operations throughout the 7 month campaign. My starting point was 95GBytes of source data. At this time, my progress is steady, and positive.
@Victor
@Don
To be clear, I am not suggesting the same area was re-searched 4 times. I am saying at first we had the middle searched on Arc7 by Go Pheonix, then we had OI return later and each outer side searched out further, and if I recall maybe a litle rescan of some missed lanes. If it was a hard crash with many pieces, I would hope we could lucky and find something even if we were not on top of the debris field.
Victor: Re: “There does not seem to be enough residual fuel for both an engine restart (producing thrust asymmetry) AND running the APU.”
That assumes the APU required fuel “in the tank”. But that is not the case. There was ample fuel in the rather long fuel line running from the left tank to the rear of the plane to supply the APU for several minutes once the fuel in the tank was exhausted.
@airlandseaman: Maybe. Once the suction to the DC pump goes dry, the DC pump can no longer pressurize the APU fuel line. I don’t know how the APU’s boost pump would operate with low pressure in its suction line, and whether the entire residual fuel in the APU fuel line would be available. Perhaps others can comment.
Victor: I don’t know for sure about the 777, but in all the low wing aircraft I have flown that use wing tanks, the fuel pump is in the engine compartment above the fuel tank.
…I am only referring to the APU pump locations, not the ME pumps.
@airlandseaman
I don’t understand the issue about starting the APU after fuel depletion shuts down the engines? There could be residual fuel that the APU could access that the main pumps cannot. But the RAT automatically deploys when the engines shut down and provides electric and hydraulic power for some of the systems.
Is there some issue about the RAT operating all the way to impact?
Hank: The discussion is about the reason why there was no IFE logon at 00:21 as would be expected following the AES logon at 00:19:37. This has nothing to do with the RAT, which is believed to have been deplyed circa 00:18. But the RAT does not power the AES.
@airlandseaman
Thanks. Hank
@Richard
@Victor
Thank you for your kind words. Given the residual fuel quantity at fuel exhaustion, I agree that it’s unlikely that both the engine and APU relit/started. In that case, the engine would have consumed some fuel during the relight attempt, but the bulk would have been available for the APU. Let’s say the engine wound down to 35% N3 in 30 seconds without a relight. At the end of that period, the EEC would have shut off the fuel and ignition and disabled the auto relight function. Using the light-off fuel flow figure from the report, the fuel consumed during the relight attempt would be 140 kg/hr x 30/3600 hr = 1.2 kg. That leaves 12.4 kg of fuel available for the APU auto-start, which provides plenty of running time for the SATCOM transmissions.
RE @Victor’s comment: “I don’t know how the APU’s boost pump would operate with low pressure in its suction line, and whether the entire residual fuel in the APU fuel line would be available.“
I doubt the APU would continue to run after the wing tank ran dry. I note ALSM’s comment regarding the placement of the engine pump and wing tanks in the light aircraft he has flown, but in the MH370 case there is a long fuel line and a considerable height difference between the tank and the APU. The auto start is also assumed to have occurred at very high altitude. @David previously suggested that vapour lock would prevent the APU suction feeding under those conditions and I agree. If the main tank boost pumps fail on one side, the associated engine won’t reliably run by suction feed above FL380. I therefore think it’s unlikely the APU would run at high altitude without boost pump pressure, especially given that it is mounted higher than the tank.
RE @Victor’s comment: ”If the left engine fails first and the left bus is automatically tied to the right, can we be certain that the break time does not cause a reboot of the SDU? The SATCOM is designed with enough internal bus capacitance to ride through a power interruption lasting 200 ms, but do we know what the actual break time would be for an in-flight transfer?”
I remember it being discussed some time ago and I seem to recall there was an opinion that the power interruption would not be sufficient to cause the SDU to reboot. That said, I don’t know the duration of the break time for the power transfer.
@Don Thompson. Thank you for your answer on the suitability of a level D FSS for testing an MH370 end-of-flight scenario.
On the possibility of a shift of BFO timing further into an uncontrolled descent sequence can you estimate/guess what the time out for a log-on confirm response would be?
Conceivably there might be more than one LOR that fails, particularly if the link has been broken via aircraft attitude.
@Andrew
Regarding the last point, FSX PMDG shows an apparent quick reboot upon left engine fail, which is of course questionable fidelity to real world, but sometimes gets dragged into the Twitter MH370 debates.
@DennisW
I agree with your objections concerning recommending an area near 34.4S. In particular your point concerning the performance of the BFO data is important. It is not acceptable to assume Gaussian statistics (even if it is only implicitly assumed) for the error distribution, since after a violent thermal and pressure cycling of the SDU without power on the thermal stabilization, the oscillator is likely to behave erratic for quite some time. Such an erratic behavior produces a tail-heavy data distribution.
For those unfamiliar with this kind af data distribution it means that ‘outliers’ far beyond the normal standard deviation are orders of magnitude more likely. If one tries to squeeze this distribution into a normal distribution with a 4Hz standard deviation it leads to an artificial shift towards the optimum for the BFO data (around 27S) compared to the Ashton paper result, and in addition other possible solutions may be overlooked.
I have just returned from vacation and quickly read through the last couple of hundred contributions, so further comments will come gradually over the coming days.
re: IFE (log) missing [& (re-)search priority, if any?!]
From a (general) system point of view, IFE is a subsystem, and an add-on subsystem too [actually don’t know how it works at all]. But from this point of view, is it really impossible to [‘physically’] disconnect IFE [on the fly] from the (main) system? Of course, this would only likely happen in a completely different scenario …
By the way, does it make more sense (cents) to search the wider part first [if both parts (34.x) selected]?
More remotely, wonder whether the dive-glide-dive (if happened) could also be due to ‘system constraints’ too (i.e. a different kind of “struggle”)?
@Viking
Even without any unusual perturbations, the math associated with using Gaussian stats on a non-ergodic and non-stationary process is deeply flawed. The advanced degree people in the DSTG were obviously sleeping in stats classes.
My computer science professor daughter knows how to compute mean and variance, but has no idea if that is meaningful. Don’t ask me how I know. Very dissappointing.
In the above I asked if anyone has definitive confirmation that the ATSB statement that you can switch off the IFE and therefore prevent it from logging on is wrong. I take no answer for no.
@Don Thompson
I would like to understand the towfish scanning a bit more in detail.
– Could you give an indication for typical towfish altitude off the seafloor?
– Would you know how towfish position was determined?
@Victor, Andrew. Victor asked, “If the left engine fails first and the left bus is automatically tied to the right, can we be certain that the break time does not cause a reboot of the SDU?………………”
Def of Underwater Search Areas, p8, 3rd Dec 2015. About bus tie breakers joining left and right AC buses, “This power switching is brief and the SDU was designed to remain operational during such power interruptions. To experience a power interruption long enough to generate a log-on request, a loss of both AC buses, or a disabling of the automatic switching would be required.”
@Niels,
The ‘ideal’ altitude for the ProSAS-60 was 150m. In practice, the altitude varied considerably as the crew navigated it over the seafloor features. I’ll pull together some plots.
I cannot emphatically describe how the towfish position is determined but these inputs are used: USBL techniques with the tow ship (referenced to a DGPS derived position for the ship), a DVL and INS on the towfish, towfish depth from water pressure, and a downward looking sonar on the towfish recording the towfish altitude off the seafloor.
Position data was recorded, at 1sec intervals, by a software application on the ship: 1 record with towfish position and 1 with towfish attitude.
The MH370 Flaperon arrived at the Direction Générale de l’Arment Techniques Aéronautiques (DGA TA), a French Ministry of Defence facility for aviation expertise, in Toulouse on 1st August 2015. A tribunal of the French Ministry of Justice requested DGA TA to prepare a report on the Flaperon. This was completed on 26th July 2016 and consisted of 238 pages, 61 photos or figures and 13 appendices. The report contains the correspondence with Boeing via the French police and Boeing’s lawyers in Annexe 12 (the questions asked on 11th February 2016) and Annexe 13 (the responses received on 18th March 2016). Boeing responded to all questions, but refused to reveal the specific makeup of the composite portions of the Flaperon as it was proprietary and commercially confidential information. Boeing gave a general overview of the composite portions of the skins, spars and ribs in the Flaperon and the composition, characteristics and manufacturing method of the standard modulus epoxy impregnated carbon fibre fabric used in the Flaperon.
The report concludes “In the absence of data from Boeing, and despite the deterioration of some fracture surfaces, a hypothesis was nevertheless formulated: taking into account the results of the examinations, it appears that the flaperon impacted the water while still attached to the aeroplane and that at the time of the impact it was deflected.” and “The little data supplied by Boeing did not enable the examination to be progressed by making calculations that would have made it possible to confirm or reject the proposed hypothesis.”
The Flaperon was manufactured by Construcciones Aeronauticas S.A. (CASA), an Airbus subsidiary based in Spain at San Pablo, Seville and delivered to Boeing on 18th February 2002. On 24th August 2015, François Grangier, an expert appointed by the French Supreme Court and Pierre-Charles Rolland an Airbus Engineer appointed to assist the court, contacted Airbus in Seville to confirm the part numbers and serial numbers of the Flaperon components. Airbus Seville responded in full on 2nd September 2015, confirming the Flaperon components were from the assembly of aircraft unit number 404 for the delivery to Malaysia Airlines as part of the WB175 build, which was subsequently registered as 9M-MRO.
If the various French experts, appointed by the court, were in direct contact with Airbus, the manufacturer of the Flaperon, why did they want more information from Boeing? What would Boeing know about the Flaperon, that the manufacturer Airbus did not know? Why did DGA TA complain that Boeing supplied little data, when they were in direct contact with the Flaperon manufacturer? Why did DGA TA not use their direct contacts with Airbus to get the data they needed to complete their calculations and arrive at a firm conclusion?
@DennisW, @Viking,
Please see the following links:
http://mh370.radiantphysics.com/2019/06/30/a-comprehensive-survey-of-possible-mh370-paths/#comment-23837
http://mh370.radiantphysics.com/2019/06/30/a-comprehensive-survey-of-possible-mh370-paths/#comment-23845
http://mh370.radiantphysics.com/2019/06/30/a-comprehensive-survey-of-possible-mh370-paths/#comment-23850
http://mh370.radiantphysics.com/2019/06/30/a-comprehensive-survey-of-possible-mh370-paths/#comment-23950
@Don Thompson
Thank you, Don. I think it is important to see the (aimed) 150m in the light of typical swath width (“opening angle”) and then imagine a non-flat seafloor.
It would be good to have an estimate on accuracies regarding the position determination.
@Nederland
You stated “In the above I asked if anyone has definitive confirmation that the ATSB statement that you can switch off the IFE and therefore prevent it from logging on is wrong. I take no answer for no.”
Why do you believe that an Airworthiness Directive issued by Boeing is not a definitive confirmation that the ATSB statement was incorrect?
Please see the comment from Don Thompson on 21st July 2019:
http://mh370.radiantphysics.com/2019/06/30/a-comprehensive-survey-of-possible-mh370-paths/#comment-24265
@Nederland
Here is the FAA notice describing the reasons for Boeing issuing the Airworthiness Directive to include a cockpit switch on the overhead panel 5 in order to be able to cut the power to cabin components of the IFE, cabin lighting and passenger seats in case of fire or smoke, as explained by Don Thompson.
https://www.dropbox.com/s/ewzb5tb32iz2aas/EASA_AD_US-2014-16-11_1.pdf?dl=0
@Nederland
Unfortunately re: confirmation, as you know there are many closed lips re: MH370 (Boeing, Malayasia, etc etc) thus as the public we do not have the advantage of confirmation of many facts. DrB has some fuel consumption info on secrecy agreement, so that is the nature of the problem.
The implication is however any future search effort by OI or whoever should try to get some secrecy agreements so they can rank search area proposals/assumptions.
@David: Thank you for the reference. Considering the SATCOM is designed to ride through 200 ms of power interruption, and the contactors make and break in about 20 ms, it’s not a surprising result.
@Richard
I give up.
The most amusing of your links is the “unexplained” 20Hz BFO error during a routine flight chronicled in the DSTG book. Apparently you and DrB are comfortable ignoring it.
@TBill
I agree we are not party to the full truth, but at least we can accept the truth, where we have convincing evidence.
We have been very fortunate to have received data from a number of whistle blowers in Malaysia.
@DrB has also been very fortunate to have received data under a confidentiality agreement.
Please do not try to knock it as “unfortunate”.
Please do not try to imply any future search is only possible, when dependent on confidentiality agreements.
Such an implication, is false.
@DennisW
You regurgitate your same nonsense.
I give up too!
Do not be surprised, if I regurgitate, what you consider, “our same nonsense” back to you.
@Richard Concerning the questions you pose at the end of your comment above (#24322), don’t you think the French investigators are simply establishing a ‘caveat’ in case their ‘conclusions’ are shown to be inaccurate?
@shadynuk
I had the same thought, but then I thought they are professional scientists and engineers.
I then thought their paymasters are the French Goverment and sadly concluded, their statements were politically motivated more by the enduring battle between Boeing and Airbus.
@Richard
What I would prefer is a link to the analytics substantiating your claim of an optimal route based on BTO alone.
@Richard
RE: ”If the various French experts, appointed by the court, were in direct contact with Airbus, the manufacturer of the Flaperon, why did they want more information from Boeing? What would Boeing know about the Flaperon, that the manufacturer Airbus did not know? Why did DGA TA complain that Boeing supplied little data, when they were in direct contact with the Flaperon manufacturer? Why did DGA TA not use their direct contacts with Airbus to get the data they needed to complete their calculations and arrive at a firm conclusion? “
If the components were manufactured by Airbus under licence to Boeing, I expect there would be agreements in place to protect Boeing’s intellectual property. In that case, Airbus couldn’t legally release the information without Boeing’s permission.
@Shadynuk: It comes down to which is more credible: the hypothesis of the French, or the later failure analysis of the flap by the ATSB. Ideally, the French would incorporate the observations and conclusions from the later investigation of the flap into their results and determine if the witness marks on the flap match their hypothesis. (The ATSB believes they don’t.)
re:Allan variance
In the present context the Allan variance seems to be applied to the characteristics of the on-board oscillator, presuming that the oscillator in the satellite is quite stable (not) as is any oscillator at the earth station.
The Allan variance of a frequency of an oscillator, in the time range less that 100 sec or so is dominated by angle random walk. This would be true for any time-discrete measurement of BFO. When used in inertial navigation systems, the sensor ARW is said to result in a navigation error that increases as sq-rt hr. (That is, starting at a particular location, the location at 1 hr differs from the computed location by a value proportional the Allan variance. It can be anywhere within +/- the value. How this applies to the present case is unclear.)
Interpreting the Allan variance at long times is only possible semi-quantitatively as the behavior is highly dependent of the specific error mechanisms (such as temperature variations, lack of complete cancellation of bias offset, long term aging etc.)
It seems to me that the typical behavior of a crystal oscillator, including the effects (at least qualitatively) of turn-on transients as been thoroughly discussed over the past years. That a measurement on an another flight apparently exhibited a large unexplained error (without access to the completed data and algorithm used) should not divert our attention from the data set we have.
The original Inmarsat paper has some nuggets of information on the BFO errors due to the “eclipse effect” during the period 19-22UT, where the most likely BFO error originated (and can be estimated). I would dearly love to see plots such as Fig. 11 for a period not dominated by the eclipse effect.
@Andrew
You stated “If the components were manufactured by Airbus under licence to Boeing, I expect there would be agreements in place to protect Boeing’s intellectual property. In that case, Airbus couldn’t legally release the information without Boeing’s permission.”
In that case, it begs the question as to why Boeing put their commercial advantage through protecting their proprietary intellectual property, before solving what is arguably the greatest aviation mystery involving a Boeing aircraft.
@Andrew
You stated “If the components were manufactured by Airbus under licence to Boeing, I expect there would be agreements in place to protect Boeing’s intellectual property. In that case, Airbus couldn’t legally release the information without Boeing’s permission.”
If this was the case, then it begs the question as to why Boeing put their commercial advantage through intellectual property before solving what is arguably the greatest aviation mystery involving a Boeing aircraft.
Oops! The web site swallowed the first comment. NOT!!
@Richard
Thank you for that AD file!
First, the ATSB statement was, on the contrary, that it is possible to switch off the IFE from the cockpit and in so doing prevent a logon. Without strong evidence to the contrary, I’d say this is correct.
In the AD, I can’t find confirmation that the IFE will still logon to the SATCOM connection. On the contrary, I read that you can turn off electrical power to the IFE system. In the FI, I read that there is an interface between the IFE and the SDU (p. 49). I would therefore think that the IFE won’t logon if it is no longer powered.
@TBill
Of course if there is confidential information to the contrary, that could make a difference, but in this case I haven’t heard of any (not even that such information could exist). And I’d also say this is not some industrial or investigative secret, if it has even been addressed in a published ATSB report.
Victor wrote: It comes down to which is more credible: the hypothesis of the French, or the later failure analysis of the flap by the ATSB. – There is also the middle way that the flaperon was not deflected but still came off on impact rather than in flight. In fact, there is nothing in any ATSB report suggesting otherwise.
@DennisW
You stated “What I would prefer is a link to the analytics substantiating your claim of an optimal route based on BTO alone.”
Links already supplied, more than once, but you are not listening, so I rest my case.
@Richard
Your name appears 133 times in this section of Victor’s blog. I looked at all of them (again). All I could find was your claim of me not listening and Nederland being obtuse.
@Nederland
You stated “I read that you can turn off electrical power to the IFE system.” That is not true. That is not stated in the document that I provided.
Electrical power to the complete IFE system is not turned off. Only the components in the passenger cabin are turned off, in case of fire or smoke.
The AD states that the new switch removes power from “the passenger cabin in-flight entertainment (IFE) system, cabin lighting, and passenger seats”.
I previously pointed out the comment from Don, where he has gone through the work instructions of the AD in detail and concludes that the comms functionality in the MEC is not affected.
Don further reports that Andrew and he had gone through the work instructions to implement the AD. The PIIC and the EPESC provide integrations between the IFE and PSS, PAS, CSS. There is no evidence based on their analysis that the PIIC and EPESC are shutdown.
Do you have evidence to the contrary?
@DennisW
My apologies! I was referring to the 4 links provided earlier today.
@Richard
There is no evidence based on their analysis that the PIIC and EPESC are shutdown.
I’m not sure that this answers the question.
SATCOM, voice, data and so on do come online again. That is true. But how can the IFE log on if it is unpowered? And how can we be sure that this will definitely happen?
@Nederland
I’m away from home at the moment and don’t have access to the documents, but IIRC, the electrical relays associated with the IFE/PASS switches do NOT affect power to the PIIC (passenger inflight information computer) or the EPESC (enhanced passenger entertainment system controller), the two components responsible for the IFE connection.
@Andrew
How about if the passenger inflight information computer was not operational for the flight?
@Nederland
I will let @Don Thompson and @Andrew speak for themselves, but in my view they are both competent and knowledgeable individuals with respect to the B777 systems and work instructions for a Boeing 777 AD.
If they tell me, that they have been through the work instructions of the AD and it only effects the cabin passenger part of the IFE and not the MEC comms IFE functionality, that is good enough for me.
Of course, if your judgement of their expertise is different, you are entitled to your opinion.
Just saying, there were perhaps some issues with the IFE. A software downgrade a few days before the flight, and also the following defect: In-Flight Entertainment (IFE) Airshow does not show arrival time/time
to destination logged time & problem still persists. (FI, p. 28)
And can we also be sure that the AD was implemented? In other words, can we be 100% sure that nothing has been missed and that the ATSB was definitely wrong?
@Ned(erland)
I will repeat: the purpose of the Service Bulletin that describes the implementation of the IFE/PASS switch on panel P5 in the flight compartment is to “provide new switches on the flight deck than can remove power from the cabin systems if smoke or flames occur. Smoke and flames in the passenger cabin can cause injury to the passenger and damage the safety critical cabin equipments.”
The SB makes no mention of the LRUs located in the MEC. The LRUs located in the MEC provide functions that are integrated with other systems: the Cabin Services System including Passenger Address, Passenger Service, and Cabin Interphone functions. The FCOM description for the IFE/PASS switch makes no mention that CSS/PSS/PAS/CIS functions are affected by operation of the switch.
Further, and more importantly, there is nothing in the conditions observed during the flight that the IFE/PASS switch was toggled to OFF. At 1825UTC, the IFE system opened its connections over the SATCOM datalink. There is nothing to suggest that the IFE/PASS switch state changed after 1825UTC.
When considering the hypothesis that, after Main Engine Fuel Exhaustion, the APU auto-started and ran for a finite time the expected sequence of events is similar to the 1250UTC SATCOM initiation on the ground at KLIA: the aircraft was powered by the APU, SATCOM boots up and after an interval the IFE initiates its connections over the SATCOM Datalink.
You wrote, above, “[I can’t find confirmation that] the IFE will still logon to the SATCOM connection.”
“logon to the SATCOM connection. is word spaghetti – those words don’t mean anything. If you have no clue about the IFE’s use of the SATCOM datalink, why even enter the discussion? ARINC 628, give us a run through of that?
I am not finding the engagement constructive.
@Nederland
You asked “How about if the passenger inflight information computer was not operational for the flight?”
I can assure the IFE was operational for the flight.
I can even tell you what music was playing! Pet Shop Boys!
https://www.dropbox.com/s/0blbth9nsapmosa/Pet%20Shop%20Boys.png?dl=0
@Don
I’m sorry you don’t find the engagement constructive.
I still have to say though (Further, and more importantly) that the perp could have forgotten to turn off the IFE after the diversion and before the 18:25 logon. He could have changed that immediately thereafter (probably one of the messages that show up on the screen?). I’d suspect that he wanted to make sure that no message from the cabin gets through.
The ATSB report also seems to raise that possibility (the IFE system being selected off from the cockpit overhead panel at some point after the 18:25 logon).
@Richard
Yes, the IFE was operational, not sure about inflight information though. Time to destination seems to be an important part of that, and that didn’t work.
@Nederland
You asked “And can we also be sure that the AD was implemented?”
That is irrelevant.
If the AD was not implemented then there is no switch in the cockpit to remove power from the cabin passenger IFE system.
Don already stated “Prior to implementation of that AD, the cabin crew/purser had an ability remove power from the seat position equipment using a switch at the purser station. Implementation of the AD gave control of power to ALL cabin located equipment from the flight compartment.”
@Nederland
You stated “IFE was operational, not sure about inflight information though. Time to destination seems to be an important part of that, and that didn’t work.”
The last ACARS messages show the destination as ZBAA.
There is no ACARS update showing the destination changing to the South Pole.
How do you know the time to destination didn’t work?
@Richard
Again, you want to look up p. 28 of the FI (p. 47 of the pdf). The heading 1.6.3.7 (“Deferred Defects”)
In-Flight Entertainment (IFE) Airshow does not show arrival time/time
to destination logged time & problem still persists. dating to the end of 2013.
ACARS worked correctly yes,that is well known, but it seems the IFE did work for Pet Shop Boys, but not for passenger inflight information.
The LRUs located in the MEC provide functions that are integrated with other systems: the Cabin Services System including Passenger Address, Passenger Service, and Cabin Interphone functions.
In that case, too, the Cabin Interphone was rubbish as it was NOT connected to the ground (no need to logon therefore)
@Nederland
You stated “I still have to say though (Further, and more importantly) that the perp could have forgotten to turn off the IFE after the diversion and before the 18:25 logon. He could have changed that immediately thereafter (probably one of the messages that show up on the screen?). I’d suspect that he wanted to make sure that no message from the cabin gets through.”
I suspect that the real reason was, that the perp did not like Pet Shop Boys.
There was still the possibility to send a text message (SMS or email) via IFE from the cabin.
@Nederland
You stated “There was still the possibility to send a text message (SMS or email) via IFE from the cabin.”
In my view, the pilot powered down the SDU to prevent any SMS or e-mail communication between someone in the cabin and the ground. MH370 only had seat to seat calling from each handset and no seat to ground communication via SATCOM. If the aircraft was depressurised at high altitude, well before 18:25 UTC, then the perp would no longer be concerned by possible SMS or e-mail communication between the cabin and the ground. The passengers and cabin crew would all be dead.
@David,
You asked: “Should it be that it does fall within tolerances, the crash site might be expressed as a band along the arc rather than a point?”
A band always been the recommendation, as the path from Arc 6 to Arc 7 is highly uncertain.
You also asked about “the ‘alternate’ electrical generator loading configuration, whereby the SDU/SATCOM re-boot initiation would occur at right engine failure , , , ,”
Here are my fuel and endurance model predictions for a LNAV 180 route:
1. NORMAL Electrical Configuration:
REFE: 00:10:00, LRC, FL390, FFF 1.07%, M0.8356, 483.5 KTAS,
260 KCAS, 3414 CUM AIR NM
LEFE: 00:17:30, INOP, FL 363, FFF 1.07%, M0.665, 385 KTAS,
208 KCAS, 3467 CUM AIR NM
2. ALTERNATE Electrical Configuration
REFE: 00:17:30, M0.830, FL390, FFF 1.07%, 480.5 KTAS,
258 KCAS, 3439 CUM AIR NM
LEFE: 00:25:00, INOP, FL 348, FFF 1.07%, M0.623, 362 KTAS, 208 KCAS, 3494 CUM AIR NM
The alternate electrical configuration can have about 55 NM of powered flight after 00:17:30, with a MEFE at 00:25.
The main argument I have against this possibility is the lack of IFE communications at 00:21. If the APU started at REFE at 00:17:30, it would continue to provide power until after LEFE at 00:25. It’s not clear to me why or how the SDU or the MEC IFE equipment could lose power between 00:19:37 and 00:21, so that the IFE communications would not occur, even though in this case the aircraft is still powered by the left engine and the APU is still running at 00:21.
@Richard
Two concerns:
1) If someone attempted to send a message before 18:25 (which is likely) while SATCOM was down, would the system not try to resend that message some time after the IFE came online again? (Would it not therefore make sense to depower the system just in case?)
2) If there was a decompression (commonly assumed but not proven), it can hardly have lasted for as long as an hour. At least this is what Peter Foley said who rightly pointed to the risk of decompression sickness for any person in the cockpit (for example, Z. was still a smoker, given his age a candidate for COPD). There was probably a chance that someone in the cabin could recover from unconciousness, especially the cabin crew who had used the portable oxygen bottles. (So why risk that?)
I agree that SATCOM was down still before the diversion. To make sure no messages are sent. If the IFE was depowered also, that would surely have raised early suspicions in the cabin. On the other hand, passenger inflight information was dead, and no one could have noticed any change in the flight plan. The perp could have decided to turn on SATCOM again to check for incoming calls/messages (or for any other reason), but would then have had to depower the IFE if only as a precautionary measure. That would explain why the IFE logged on regularly on ground and at ~18:25 but not during the final logon.
@Nederland
I assume that if the cabin was depressurised, that it lasted a maximum of around 30 minutes after diversion.
Even at a very high setting (10 l oxygen per minute), the portable oxygen bottles would last longer than 30 mins. It is easy to fall unconscious, but for example passengers of Helios 522 were still alive after ~3 hours of depressurisation.
Still another possibility is that the perp deliberately left on the IFE until 18:28 to not make it look like deliberate action (depending on the degree of preplanning).
Would there be no automatic transmission (not necessarily Pet Shop Boys) if the IFE was online for several hours?
@Nederland asked: Would there be no automatic transmission (not necessarily Pet Shop Boys) if the IFE was online for several hours?
That’s a very good question. (I believe the “Pet Shop Boys” was a password for logging on to the IFE server using very rudimentary security.)
In the case of the Inmarsat network, after inactivity of around an hour, the GES pings the AES to determine if the connection is still alive, and the response from the AES is what produced the BTO and BFO data. However, in the satellite logs, we see no attempt by the IFE server to ping the IFE client using the Inmarsat network. Perhaps after a certain time period, the IFE server simply marks the connection as inactive without verification.
So, I think the quick answer to your question is there are no automatic transmissions for the IFE connection.
@Dr B. Thank you for looking into that.
In the ALTERNATE configuration, for the same last leg duration but with that same right engine fuel extended by 7½ min to match NORMAL LEFE (and hence BFO) timing, means a lowered the right’s fuel consumption/hr. That requires less speed.
To cover greater distance (3439 less 3414 = 25 NM), with that fuel means a shade less fuel consumption/mile. So fuel/hr and fuel/mile have both improved by slowing, meaning neither was quite at the most economical?
Irrespective, whereas my premise points (which must be askew, though where I know not) had the ALTERNATE crash site further north this places it a little further south, the course being say ½˚ west of south. Neither the placement nor course I would assume would affect BTO’s and BFO’s appreciably.
That is reassuring thanks: the effect of ALTERNATE on the modelling apparently is within bounds (as you thought earlier).
I missed the mention of the BFO position band along the arc. Is its extent roughly clear as yet?
@Nederland
I assume the perp was not concerned with anyone attempting to send a message as only he would be in a position to do so.
@Ned
Earlier you wrote, “the perp could have forgotten to turn off the IFE after the diversion and before the 18:25 logon.”
The simple assumption for the loss of SATCOM service during the hour prior to 1825UTC is that the L AC Bus was isolated, not that a specific circuit breaker located in the MEC was pulled.
Isolating the L AC Bus removes half of the power for passenger amenities in the cabin, should the R Main Bus also be isolated (and there is no specific evidence for that) then all pax cabin amenity services are unavailable.
No opportunity to use the seat position IFE to create an message that you consider may have been queued.
It’s helpful to assess the observations about the SATCOM datalink as secondary to other actions, rather than absolutely central to the observed events. Contriving actions that are ascribed solely to align with SATCOM service is a common mistake.
Before I go on to address comments following the one I have quoted, please give me some idea of your understanding of ISO-8208 SSN communications so that I have an idea where to begin.
@Nederland
If MH370 experienced intentional depressurization as severe as it seems possible (FL380+), the portable O2 bottles and masks are essentially useless.
The strong vacuum sucks the pressure out of your lungs. If you knew depressurization was coming and were trained scuba-type person (as maybe one of the Russian PAX was) you might be trained how to handle that. But most likely there was chaos in the cabin with the aircraft unexpectedly making extreme turns and climbs.
Helios had bleed air on and the outflow valves were partially closed, so it only got to about FL250 in the cabin, which means the PAX were alive but unconscious when it crashed. In that case the O2 bottle helped the flight attendant.
If MH370 wanted to do it quickly, bleed air would be shut off, and outflow valves set to full open. Altitude would be FL350+. I can think of a few more less likely things to further speed up depresurization, such as open cockpit windows when the cabin pressure allows that, which I would not rule out however.
@David,
In reply to your question above concerning a retransmission delay in the AES.
First, I’ll reiterate that the AES can tolerate an interruption in its reception of the P-channel signal from the ground, up to ten seconds.
I’m suggesting that it’s possible the GES did not successfully receive and decode the first LOR transmission from the AES. Perhaps an R-channel ‘collison’ occurred, or momentary aircraft attitude caused loss of LOS. It’s worth noting that a single burst on a 600bps R-channel has a duration of 960ms.
The AES waits for a period of between 12 and 19 seconds for a response to its first Log On Request. After that period expires, it retransmits. A variation in the period is determined by a limited range random number (the random element increases as failures repeat).
@Don
Thanks for your reply, and I’m afraid I don’t know much about ISO-8208 SSN communication, but happy to listen.
I do know, though, about the left AC bus and the different theories proposed in that regard. My own theory still is that shutting down SATCOM was part of the plan.
Even if the IFE was not operational while the left AC bus was isolated, once power was restored at ~18:25 and the IFE came online again, in theory someone could have been able to send a message, so this could explain why the IFE might have been switched off just after. That would make sense even as a precautionary measure.
@TBill
Even if it is possible to depressurise the aircraft very quickly, than the perp in the cockpit would have experienced similar effects (despite the advantages of 100% oxygen and pressure breathing). In the extreme scenario of open cockpit windows, that would presumably kill anyone in the cockpit, too.
I don’t think anything like this has ever happened and it’s all speculation at the moment.
@Nederland
I’ve never been a supporter of the depressurization scenario for three reasons.
1> It is difficult to reconcile with a negotiation scenario.
2> The compatibility of the 18:25 BFO with the likely aircraft heading and speed at that time.
3> There is no hard evidence to support it. Pure speculation.
@David,
The air speed I used for the NORMAL electrical configuration was Long Range Cruise because that is used in the overall most probable route. LRC is actually defined by a 1% fuel mileage degradation from the maximum, which itself defines Maximum Range Cruise. The air speed for the ALTERNATE electrical configuration is less than LRC and closer to MRC, so it’s fuel mileage, endurance, and range are slightly higher. This increased endurance allows REFE at 00:17:30 instead of circa 00:10.
There are routes which can be fitted at the ALTERNATE air speed, but only at a significantly reduced probability compared to the NORMAL air speed. This is a second strike against the ALTERNATE configuration, in addition to the lack of an explanation for the missing IFE messages at 00:21.
In general terms, the BTOs are much more discriminating among trial routes than are the BFOs. Our next paper will present some figures with probabilities considering BTOs + BFOs and BTOs only.
@Nederland
Pilots have pressurized masks which admittedly not risk free but whole different ballgame re: survival. I am not the least bit certain about open cockpit window scenario but I am thinking that is last resort method for cockpit smoke removal during fire, and thus could be employed to make it look like that action was necessary, or also possibly to eject some evidence. So I am keeping the option open.
@DennisW
Yes you have been consistent on that. Appears to me negotiation if any was probably over by IGARI. Over the years I listened to the other experts to see if they agree with you that the BFO behavior proves lack of depressurization, and there is not agreement on that point. Intentional depressurization to me is not speculation, but what a pilot would have needed to do to cut off outside communications and maintain a certain mission plan without interruption. Basically the next logical step after Flight 93.
@TBill
Negotiations?
I missed the moment when this option appeared. Could you please indicate any source where I could learn more about it.
@Greg
Sorry. It is also simply speculation. No evidence exists for a negotiation having taken place.
@Greg
Since about 2014 I believe, a participant on the blogs has claimed knowledge that there was a plan to divert MH370. Here is my prior essay on it, in the reference section I document what Victor has summarized about it.
https://twitter.com/HDTBill/status/1080510470841348096?s=20
@TBill, @DennisW, thank you for your answers
@Dr B. Thanks again and for the LRC economy explanation. I do recall LRC is an optimisation between fuel per mile and trip duration.
While noting that the 1% MRC range increase would take the NORMAL configuration aircraft 35 miles farther, my understanding is that that would reduce consistency with BTOs/BFOs.
“There are routes which can be fitted at the ALTERNATE air speed, but only at a significantly reduced probability compared to the NORMAL air speed.” That joins the IFE issue (though see below) in making the NORMAL the more likely from those aspects though NORMAL looks the less probable from a final BFO simulation perspective. Even so simulation weaknesses have been the subject of recent discussion.
More about that, in the ALTERNATE electrical configuration, APU auto-start (and autopilot disconnect) would have been prompted by depowering of the transfer buses. That also would cut power to all fuel boost pumps. The APU DC fuel pump would have started for the APU, though that supplies just 1430 kg/hr at its normal operating pressure and the left engine drawing part of its consumption through it gravity feed would mean that manifold pressure was very low. If very low, APU DC pump output might increase under the decreased back-pressure but with that the supply to the APU would be prejudiced by vapour lock and the APU could fail. Conceivable the left engine could fail also from lack of supply or, possibly, air embolism from the main tank at altitude that @Andrew mentioned. That illustrates I think how careful and comprehensive simulator modelling must be to be authoritative.
On the lack of IFE log-on in ALTERNATE, possible explanations are an early crash, achievable if the 2nd BFO’s ROD continued, or the above, or extreme aircraft attitude (spiral or bank).
On the last, it is unclear to me what the AES and GES reaction would be to the AES not setting up a ground connection for the IFE SMS/email application, the first IFE connection step. It looks like the GES would not interrogate. Presumably the AES would try again after some time-out. If so, the abnormal attitude would have to persist for there to be no more transmissions. So maybe attitude is a doubtful explanation.
4th line of the fattest paragraph, ‘..it gravity..’ should read ‘..its gravity..’
@DennisW
I agree that the statistics of the oscillator drift is non-Gaussian even without the rough cycling in temperatrue and/or pressure. However, the statistics gets significantly ‘worse’ with cycling.
In addition, there are other problems with the BFO values. Some of these I described in my paper. This only strengthens your objections.
However, at the moment I would like to move on to some other problems.
@All
The general issue which makes me most uncomfortable with recommendation of a new search near 34.4S is that this solution is based on several implicit assumptions. We have already discussed the BFO issues. This is a conceptually important problem since it is related to basic science and technology. However, there are many other hidden assumptions.
One of these is that the reason for the diversion must have been suicide. In case of any other underlying reason than suicide, the pilot would never have chosen to aim the airplane for the south pole, since it would leave absolutely no possibility to survive.
The detailed arguments for this conclusion are longer than a typical Blog contribution, but I think this short version is a good start.
Jumping to an intermediate conclusion, we do not have solid arguments to exclude other possibilities than suicide. I do agree that the reason must be a deliberate diversion, but we cannot be sure it was done for committing suicide:
(1) One alternative is the suggestion for negotiations
(2) Another one is some kind of scam (several possible ones)
My problem here is the implicit nature of the assumption. A discussion is needed before we can justify such a radical assumption.
@Dr B. A correction to my 8:24 PM post please. I see that the isolation valve that rleases APU DC pump fuel delivery to the left engine fuel manifold opens when there is no manifold pressure but also when the engine is not operating, so there will be no supply from it to the left engine despite it having started for the APU.
In that case the supply to the APU will be unaffected unless the left fails due to vapour lock in its gravity supply or air entrainment.
@Don Thompson. Thank you once more. Transmission does require appreciable time and time out is lengthy.
Iterating, just like IFE non-completion has been attributed to the possibility of aircraft extreme attitude, multiple unsuccessful LOR transmission attempts could delay the final BFO timings appreciably, bringing those closer to simulation timings.
However given that the LOR’s BFO indicated a descent in the 2900 – 14,800 fpm range (Holland) more likely it would be in the upper part of that range for attitude (bank or a spiral) to be a likely cause of a transmission failure. It is hard to see how such a break in link would last long enough to cover multiple unsuccessful re-transmissions, that is unless aircraft motion caused antenna tracking to go haywire.
@Viking
My preference for a negotiation scenario is based largely on the early response to the diversion by Malaysia. It was handled at high levels in the government, and not by the usual resources who would deal with an emergency situation. It is likely that people controlling the response knew full well that it was not an emergency, and expected the aircraft to land somewhere.
Viking says:
@All “… (1) One alternative is the suggestion for negotiations”
“(Adapted from Victor Iannello)
• Since 2014, Freddie has been writing to Victor Iannello (and online discussion groups) with a rumour out of Malaysia. It has not been possible to substantiate the rumour to date.
• In the days after MH370’s disappearance, a politically connected individual allegedly related to Freddie what was planned for MH370, as follows:
• The objective of the MH370 diversion was to embarrass Prime Minister Razak into agreeing to call new elections”
I still maintain the following took place.
MH370 flown by Captain Zaharie proceeded out into the Andaman Sea came back and around to BEDAX and on to a heading due South and slowed to 370 knots.
Using waypoints at ISBIX, Cocos Islands and Christmas Island crossed arcs 2, 3, 4, 5, maintaining a steady 370 knots.
After Christmas Island slowed slightly and crossed the 6th arc on a heading to Yogyakarta airfield.
The last signal, the 7th arc, placed MH370 some 160nm from the airfield and only 80nm from land.
Nothing that I have been told or seen since 2014 is convincing enough to say that the Captain deviated from the plan. However for some unknown reason he didn’t land and ran out of fuel and ditched before reaching Yogyakarta.
@DennisW
@TBill
Have you ever asked yourself the question of why MH370 was ordered to turn off (ACARS data) VHF coverage? Surely switching it off during flight would have left a record in the data logs.
@TimR
“a steady 370 knots”
By the way: it is very close to the performance of Global Hawk.
But I’m not suggesting anything.
@Don Thompson
I have a question about the IFE system message.
We know that the IFE message expected at 00:21:16 UTC from the aircraft was not received. We also know there are a number of possible reasons why this IFE message was not received, including the possibility that the APU had run out of fuel, the aircraft attitude prevented a line of sight between the aircraft’s satellite antenna and the orbiting satellite relaying the signal or the aircraft had crashed.
A controlled glide scenario would take between 14 and 22 minutes and the aircraft attitude would normally allow satellite communication.
We are also told that there was 13 minutes 45 seconds of fuel estimated to be available to the APU.
Andrew’s analysis shows it is unlikely that there was an engine restart, because if it happened, there would not be any fuel left to power the SDU long enough for its reboot cycle to complete and we would not have received the 00:19:29 UTC Logon Request and 00:19:37 UTC Logon Acknowledge messages.
It is conceivable, but unlikely, that the aircraft first entered a steep descent of around 15,000 feet per minute, in line with the final satellite transmission received at 00:19:37 UTC and coincidentally, at the time of the IFE message 89 seconds later, was recovering in an attitude that prevented the signal reaching the satellite.
At 18:28:10.260 UTC, on Channel IOR-T1200-0-36D7, Superframe Number 12980, SU Numbers 0 to 5, we find the IFE message containing the text “Pet Shop Boys”.
This is followed by a “Acknowledge User Data” message.
My question is: If MH370 was in a glide at 00:21:06 UTC, but the aircraft attitude was such that the IFE message did not get through and no acknowledge message was received, would the IFE system not automatically repeat the IFE message for a preset number of times until an acknowledge was received?
@Dr B. Re my last para in my 8:24 PM above I see @Richard has posed one very similar to @Don Thompson. Don’s answer therefore should address that speculation I raised with you.
@David
Apologies! I did not read your comment at 8:24 PM carefully enough and missed the last sentence in particular, where you state “If so, the abnormal attitude would have to persist for there to be no more transmissions. So maybe attitude is a doubtful explanation.”
So if:
1. Aircraft attitude is a doubtful explanation.
2. APU running out of fuel is a doubtful explanation.
3. Engine restart is a doubtful explanation.
4. Alternate Electrical Configuration is a doubtful explanation.
5. The RAT deployment does not power the AES.
6. The cockpit switch (if implemented) does not cut the power to MEC IFE components.
May we conclude the aircraft crashed before 00:21:16 UTC?
@Richard
RE: ”6. The cockpit switch (if implemented) does not cut the power to MEC IFE components.”
The MAS FCOM shows that the IFE/PASS SEATS switch was installed on 9M-MRO.
@Andrew
Many thanks for the correction.
So if:
1. Aircraft attitude is a doubtful explanation.
2. APU running out of fuel is a doubtful explanation.
3. Engine restart is a doubtful explanation.
4. Alternate Electrical Configuration is a doubtful explanation.
5. The RAT deployment does not power the AES.
6. The cockpit switch does not cut the power to MEC IFE components.
May we conclude the aircraft crashed before 00:21:16 UTC?
@Richard. No prob at all.
“May we conclude the aircraft crashed before 00:21:16 UTC?”, depending on Don’s answer and based on those ifs, I would have thought so.
@TimR
“a steady 370 knots”
Not long after the first BTO data became available there were many guesses at the aircraft speed.
I was able to demonstrate, quite conclusively I think, that the mid-flight average speed, at least between 19:41 and 20:41, was around 490 knots. The methodology was rather unique, and quite different from subsequent track models, and it is interesting that the best and most elegant models, almost 5 years later, are also proposing a very similar speed. It is just not possible for the speed to be as low as 370 knots.
@Richard asked “would the IFE system not automatically repeat the IFE message for a preset number of times until an acknowledge was received?”
Not quite.
The IFE’s peer is a remote service on the ground, somewhere off in ‘ATN land’. Only when the ISO-8208 connection is established can the IFE ‘talk’ with its peer. The satcom datalink provides the ISO-8208 SSN (satellite sub-network), and operates as a Reliable Link Service. Any retries in establishing or operating the ISO-8208 SSN connection would be evident in the link level exchanges between the AES & GES.
In the period following 00:19:38, the expected datalink activity is an ISO-8208 SSN Connection Request (in the form of two R-ch bursts). That Conn Rqst sets up the first SVC for IFE. It’s the second Connection Request that establishes the second SVC which carries the infamous ‘Pet shop boys…’ string.
@Richard
If engine restart is doubtful, then perhaps we could also conclude the high rate of descent was the result of deliberate action?
@Don Thompson
Many thanks for the response.
You have pointed out previously that following the cold start 12:50 GES Log On IFE related link activity began 156 seconds after the AES Logon Acknowledge was recorded. You also pointed out above in your comment to David that “the AES waits for a period of between 12 and 19 seconds for a response to its first Log On Request”. Elsewhere you stated, had the first burst in the IFE related exchange been lost, then circa 8-15 seconds additional delay would result, before a retry occurred.
The maximum delay waiting for the missed IFE message, including waiting for a retry is therefore 156 + 15 = 171 seconds, say 3 minutes. You also remind us above that the AES cannot tolerate an interruption in its reception of the P-channel signal from the ground, for longer than ten seconds.
So is it reasonable to assume, that the crash occurred within 3 minutes of 00:19:37 UTC, because we saw neither an IFE message, nor an IFE message retry, nor a new Logon request following loss of sync on the P-channel?
If this assumption is valid, then MH370 is within 30 NM of the hot spot at 34.4°S on the 7th Arc.
@Andrew
I agree with your conclusion from the analysis in your paper, that without engine power, the high rate of descent calculated from the final BFO data value at 00:19:37 UTC at around 15,000 fpm and in particular the acceleration of around 0.67g from the previous BFO data value at 00:19:29 UTC, is unlikely without a pilot’s deliberate action.
@Richard, @Andrew: If the steep descent suggested by the final two BFO values was caused by a nose-down pilot input, it doesn’t change the fact that the missing IFE log-on request can best be explained by an impact. If this transpired, it remains unexplained why the pilot chose to wait about 2 minutes after fuel exhaustion to enter the dive, but it’s certainly possible.
@Victor
RE: ”If this transpired, it remains unexplained why the pilot chose to wait about 2 minutes after fuel exhaustion to enter the dive, but it’s certainly possible.”
Perhaps he was simply summoning up the courage for one last act to end it all.
@Victor
2 minutes is maybe the time for a final prayer.
@Richard
“May we conclude the aircraft crashed before 00:21:16 UTC?”
I remind readers I said a few days ago I am taking “passive” approach, not voicing active pilot opinions here. When @DonT gave his final list of reasons for no IFE, I was silent, versus my normal rebut after 2-minute delay.
@Nederland
“Have you ever asked yourself the question of why MH370 was ordered to turn off (ACARS data) VHF coverage? Surely switching it off during flight would have left a record in the data logs.”
Please say more about what you find interesting. I was under the impression that China did not use radio for ACARS so I was not aware of any point of interest. Here again it would be nice if we could benchmark against other MH370 flight practices.
@TimR
Thanks for checking in. To me the passage of time has not been helped the Xmas Island scenario. It looks a whole lot like the PAX saw depressurization at IGARI, which is not a new idea, it is just reconfirmed that that seems like the logical deduction. Perhaps someone in Malaysia knows more, because the inference of intentional depressurization came from some source way back in 2014…I am not sure where that idea came from but, it seems to be correct.
Thus if the rumor was correct, the actual threat T (perhaps unknown to the ground team) was apparently loss of aircraft, and the negotiations were over by IGARI. So the question becomes what was ZS’s ultimatum plan? whereas peaceful surrender to Jakarta authorties seems unlikely.
Further above I list reasons why northern locales above 25 North are frowned upon by many. One reason is drift experts DrGr and DrP are saying not likely.
Another reason is two big MH370 groups (IG and the 38 South Crowd) don’t agree with north. I would also note that the MH370-Captio/Xmas crowd seems to be awful quiet, suggesting to me they perhaps see limited merit of that idea. Of course, in truth all ideas have limited merit, so that is the base case.
@DennisW
It was indeed remarkable that the case was handled at so high level from the start. It indicates that the political leaders knew something deep about the case and feared that an embarrassing secret could have leaked out. Negotiations is one possible explanation, but perhaps there could also be other possibilities?
@TimR
Correction above:
should say- “I list reasons why northern locales above 25 *South* are frowned upon by many…”
@TimR
Your information is interesting. However, I find it strange that a flight following such a route did not leave any contrail when two other flights left relatively clear contrails in the area at exactly the same time.
I also find it strange if Shah told so many details about a plot to ‘hijack’ the plane to anyone. It would have been extremely risky and completely unnecessary.
Finally, I think it looks unlikely that such an experienced pilot would run out of fuel by some error in the calculation.
Is it not more likely that he wanted people to believe that this was what happened and instead decided to bail out and disappear?
@TBill
You stated “I am taking “passive” approach, not voicing active pilot opinions here.”
I am voicing active pilot opinions here.
Please see my comment above @Andrew:
“I agree with your conclusion from the analysis in your paper, that without engine power, the high rate of descent calculated from the final BFO data value at 00:19:37 UTC at around 15,000 fpm and in particular the acceleration of around 0.67g from the previous BFO data value at 00:19:29 UTC, is unlikely without a pilot’s deliberate action.”
@TBill
Indeed I have experienced that most people do not like routes north of 25S. The only strong argument I can see against these is the beaching pattern (including timing). However, I strongly disagree with this argument. First of all there is one (or perhaps two?) hotspot area(s) for the origin of debris somewhere between 25S and 19S.
More importantly (in my opinion) if the debris originates further north than 19S it may manage to get caught by the tropical hurricane passing two weeks later and get dragged to around 20S where the hurricane looses strength and heads west. It is delicate to hit this narrow window, but not impossible. A really interesting detail is that the end of the contrail I found seems to fit perfectly with this scenario as far as I can see with simple extrapolation methods.
@Richard
Are you willing to make one more debris-tracking simulation using these coordinates (instead of the end position I calculated from the Inmarsat data) and include the influence of the hurricane?
@Richard
Thank you for considering active pilot, yes I understand.
Richard, Andrew, others…
Re “I agree with your conclusion from the analysis in your paper, that without engine power, the high rate of descent calculated from the final BFO data value at 00:19:37 UTC at around 15,000 fpm and in particular the acceleration of around 0.67g from the previous BFO data value at 00:19:29 UTC, is unlikely without a pilot’s deliberate action.”
I do not agree. Most of the simulations Paul Matson and I conducted on Nov 2, 2014, and many of the Boeing simulations demonstrate that very high rates of descent can be expected for uncontrolled post MEFE case. For example, Boeing’s Case #6 resulted in a ROD >45,000 ft/min. See details here: http://bit.ly/2ZbP31R
In addition, there are multiple examples of actual flights where the ROD exceeded 30,000 ft/min. So, it is entirely possible…in fact likely…the ROD was 15,000 ft/min at 00:19:37 (whether controlled or not) as indicated by the BFO.
@airlandseaman: Even though a high descent rate is achievable without pilot input, what is difficult to match is the 0.67g downward acceleration, which did not occur in the airline simulations you witnessed except for the case where the engine relight caused a rapidly increasing bank angle. There either has to be nose-down pilot input, or a large amount of aerodynamic asymmetry (e.g., excessive rudder out-of-trim, thrust asymmetry) to reach the downward acceleration suggested by the final BFO values within 2 minutes of flameout.
Victor:
In the Boeing Simulation I cited above, the acceleration varied between 39 and – 20 ft/sec^2. Also, in the case of Payne Stewart’s flight, that Lear Jet descended 48,900 feet in 150 seconds, exceeding 30,000 ft/min after MEFE. It does happen.
Here is another example of the high rates of descent that can occur. This one was a crash of a Grob G102 sailplane in Boulder Colorado…one I am very familiar with. The pilot became hypoxic, lost consciousness at 23,000 ft and the plane crashed about 10 minutes later. It underwent dozens of phugoids before finally descending 20,000 feet in the final 2 minutes. The plane hit a high power transmission line shearing off one wing before coming to rest in a field a few miles from KBDU. http://bit.ly/2OkTczz
@ALSM,
The crash of Learjet Model 35, N47BA, is not a good comparison to make with MH370. N47BA reached maximum altitude, while still attempting to climb, under autopilot control.
One engine suffered flame-out, the thrust loss caused a stall, an uncontrolled descent ensued while the remaining engine continued to provide thrust.
@airlandseaman: What a number of us have tried to explain was the high rate of descent, AND the high level of downward acceleration, AND the timing within 2 minutes of flameout. With an engine relight a minute after flameout, all of these can be explained. In the Boeing simulations without the relight, the high level of downward acceleration occurs either minutes later, or not at all. On the other hand, a nose-down pilot input would explain what is suggested by the timing and levels of the final BFO values.
So either the Boeing simulations did not capture the physical mechanisms that might lead to a 0.67g downward acceleration 2 minutes after flameout, or there was a nose-down pilot input.
@airlandseaman
As @Victor mentioned, the issue is not the rate of descent per se; it’s the downward acceleration without control input, and the timing.
A couple of observations re the Payne Stewart accident:
1. According to the NTSB, ”The type and degree of damage observed on the left engine was indicative of engine operation at the time of impact.”
2. Earlier models of the Learjet had nasty handling issues in the event of a high-speed upset, including Mach tuck and aileron ‘snatch’. Several accidents involving high-speed upset led the FAA to undertake a special certification review of the Learjet in the early 1980s.
Wow! I’m more than a little surprised to hear all this new theory coming up after 5 years. This is the first I have heard anyone suggest the BFO data is only consistent with a high speed piloted descent. Payne Stewart’s flight may have been a poor comparison if one engine was still operational when it stalled, but there are other examples. And gliders don’t have an engine at all, but still have accelerated very rapidly as in the case I cited above.
I remain convinced that the data is consistent with either a piloted or piloted descent. We simply cannot know for sure until we find the plane, and then we may still not know. But either way, the data indicates the plane is very likely close to the 7th arc, not 100 nm south.
Correction: “…either a piloted or piloted …” should read “…either a piloted or unpiloted… “
@DennisW
re: your post June 2, 2019 at 11:54 am on Allan variance.
Thank you for posting the Fig 5.5 excerpt from the DSTG report, saving me the trouble of finding the original :-).
I refer you to Figs. 11-13 and related text of the Ashton Inmarsat paper where temperature effects of the sun eclipse period are discussed.
Once the underlying Doppler effect of the satellite motion is compensated, there remains a transient effect due to the strong temperature variation during the eclipse time. Since the comparison flight is on 2 March, the time of peak deviation will be different, but appears consistent with an eclipse temperature variation. The presented data is not anomalous. Rather it shows the uncompensated eclipse effect.
Thus, the DSTG data should not be used to denigrate the value of the BFO data.
@Sid
I am not denigrating the DSTG data. I am denigrating the subsequent mathmatical interpretation.
BTW, sk999 and I have beat the eclipse effect and the evolution of the March 8 data to death.
@airlandseaman
RE: ”Wow! I’m more than a little surprised to hear all this new theory coming up after 5 years. This is the first I have heard anyone suggest the BFO data is only consistent with a high speed piloted descent.”
This issue has been discussed previously. I can clearly recall comments that suggested the timing of the descent and the vertical acceleration were unlikely to occur without some kind of yaw input (eg. engine relight), or a deliberate control input.
The paper I wrote regarding the relight issue was first posted some 12 months ago, however, I don’t recall the implications for a piloted vs unpiloted descent being discussed at that time; it only resurfaced in a recent discussion. If seems to me that if an engine relight was unlikely, the most likely explanation for the vertical acceleration and timing of the descent is a deliberate control input. Nevertheless, I totally agree that the aircraft is likely to have impacted the water close to the 7th arc. I am not a fan of the dive/recovery scenario that some have suggested.
@ALSM: What new theory is coming up after 5 years? This topic has been discussed extensively under the following two posts:
MH370 End of Flight with Banked Descent and No Pilot
End of Flight Simulations of MH370
Those posts and discussions are consistent with my previous comment: So either the Boeing simulations did not capture the physical mechanisms that might lead to a 0.67g downward acceleration 2 minutes after flameout, or there was a nose-down pilot input. That was not a “new theory”.
The timing of the increasingly steep descent has never been explained for the case of no pilot inputs, other than by invoking physical mechanisms not included in the Boeing simulations, which I don’t rule out.
@DennisW
Can you point me to any posts or papers that I can review?
@all,
I think we have sufficient evidence to conclude that a benign stall at circa FL350 will rapidly lead to a descent of 15,000 ft/min with the wings being held level and the attitude maintained through the ‘barn door’ effect of control surfaces. Should a wing drop, then the nose will also drop and the drag decrease accordingly, resulting in acceleration and a higher RoD. If still under engine thrust at this time, the acceleration will continue to increase, otherwise the RoD will be limited by the drag to reach the terminal velocity.
None of the above can conclusively prove a piloted or non piloted descent.
@TBill
I am currently on travel and responding slowly. Nevertheless, I think it is a bit strange that there was an individual briefing to turn off ACARS/VHF if this was standard practice on all flights to China (because of the different network, ARINC rather than SITA). This was an information that was released only after the FI and SIR reports came out.
An early statement by a MAS pilot was:
It is Mas procedure to switch ACARS, VHF, and High Frequency selection off but this is only for flights to China as the service provider for Mas does not cover China. Some if not all pilots switch them all off for a while and then later switch SATCOMM back on to force the system into SATCOMM mode.
Not sure if that means the normal procedure was to switch off ACARS VHF mode in flight before entering Chinese airspace.
I think because ACARS was in SATCOM mode only, there were no suspicious log records when ACARS was disabled before the diversion.
I also think the test message at 18:39 was sent via VHF, which is a bit strange too since the VHF mode was disabled.
@Nederland: At 15:54:31, there was an ACARS message via VHF sent from MAS OPS to 9M-MRO to switch VHF3 (the radio normally used for VHF data) from DATA (131.550 MHz) to VOICE if the SATCOM was serviceable. Shortly after (15:54:53), the VHF ACARS link was lost and subsequent ACARS messages were sent via SATCOM. So it appears that the VHF link was disabled before the flight.
@Nederland
Last sentence, I believe you are referring to the ACARS TEXT message that MAS sent to MH370.
I am still not understanding totally, but are you suggesting that there was a superfluous (unneeded) message to deselect VHF from ACARS?
Wonder what MH371 did with ACARS, on the day before? Speculation, but also could be coded message to say “no Go” on negotiations, but with ZS on his cell phone on the runway, we already know “sterile cockpit policy” was not in force, and clandestine conversations are possible.
@TBill
Perhaps, (if there was a need to confidentially conduct or reject negotiations) it may have been an attempt to get MH370 to clear VHF3 from data to voice, so that the frequency (that very few people would be listening to as “voice”) could be used by any other MAS aircraft (hopefully one within 400nm range) to attempt contact by voice, in Malaysian, instead of using any open frequency.
@Sid Bennett
@DennisW
Can you point me to any posts or papers that I can review?
I am not sure what information yu are seeking.
@DennisW
I have read your paper of June 2 and wanted to know if there was any other available information on the analysis by you and sk999 of of the BFO data.
@Sid Bennett
The short answer is no. Our conclusion was that the eclipse effect is captured by the current Inmarsat BFO data.
@All
I am surprised to see no reaction to my claim that an end position near 34.4S means that the motive for the diversion must have been suicide. In particular since a lot of details speak against suicide:
(1) In all other cases of pilot suicide leading to loss of large passenger jets the suicide took place within a few minutes after the PIC brought himself into exclusive control (typically by locking the cockpit door). This makes MH370 a completely unique case.
(2) Shah was not a typical suicide candidate, since he did not suffer from any (even secretly diagnosed) mental illness, did not have severe economical problems, had no links to terror, and perhaps most importantly seemed to have an outward reacting personality (just look at his videos), who rarely commits suicide.
(3) A lot of effort was used to make the airplane disappear, so if the purpose was suicide it must have been extremely important to hide it. However according to TimR, Shah told one or more friends of some plot against the flight, and according to leaked information he cancelled all future appointments in his calendar. In addition, he made a tentative simulation on his private flight simulator and deleted the results in a careless way. These details do not point to any intentions of a hidden suicide. I find this contradictive evidence disturbing!
@Viking: We can’t know the motivation for the diversion, but that doesn’t mean we can’t scientifically deduce the who, how, and where. Suicide remains a possibility, as well as a diversion that went wrong.
Regarding your three points:
1) Yes, this is a completely unique case in MANY ways. You can’t use the uniqueness of any scenario to argue against it. (I would say even your preferred scenario is quite unique.)
2) Our knowledge of the captain is from unofficial interviews of people around him, his online activities and the RMP report. Those around him have described behavior that is detached, unhappy, and reckless. I don’t put a lot of weight on the RMP report, which I believe was deliberately written to put him in the most favorable light. The RMP has a history of writing reports under political pressure to whitewash crimes.
3) Rumors like TimR presents are not proven (despite my many attempts to get more facts). Those rumors could be disinformation. As for deletions on his simulator, I don’t know how many people understand how Volume Shadows work, or even if the deletions were meant to be found.
Is it at all possible that someone (passed out or otherwise incapacitated) in the pilot’s seat fell forward and tipped the column forcing a downward descent (possibly explaining the 0.64g) AFTER the plane flamed out and maybe took a slight dip down?
@Victor
Pilot suicide in itself is fortunately very rare. However, all the known cases share one important detail: They were carried out quickly. I guess this is not at all strange, since if one uses too much time there is a significant ‘risk’ someone may manage to get through the reinforced door with the fire axe. The captain on German Wings was working hard with the axe and almost made it. Have you ever seen the axe in use during a flight? I have, and it is BIG.
Indeed some of the conflicting information is unconfirmed by reliable sources. However, it seems to come from different sources, so the probability is relatively small it is all biased in the same direction.
Concerning the rarity of a scam, I am not so sure you are right. For instance the trigger for my detailed investigation of MH370 was when a Danish whistleblower confirmed that the Scandinavian Star accident was not an accident, but a scam (back in the beginning of 2016). The number of casualties were comparable to MH370. You may argue it was a ferry, not an airplane, but I do not think it makes much of a difference concerning the motive.
@Viking: You are either misinformed or cherry picking information if you think all of the rumors are “biased in the same direction”. Far from it.
In the recent work undertaken by Bobby, Richard, and me, there is no presumption of the motivation of the disappearance. The only assumption is that of automated flight after 19:41, which is presented as a null hypothesis that is then proven.
@Viking: Let me add that I don’t totally dismiss the possibility that the captain jumped. If so, it might have happened over one of the sparsely populated Nicobar Islands. However, the only way I can imagine this occurred is for a jump out the bulk cargo door, and the only way that door was accessible was if the cargo was not loaded in the aft bay in accordance to the load sheet. That would mean collaboration on the ground at KLIA as well as collaboration near the jump site. The scenario rapidly gets very complicated.
@Victor,
May I ask, what is the evidence you have for an autopilot ‘on’ flight from 1941z ?
This is important, if it was off, MRO would have entered a right-hand roll and steep spiral descent as soon as the right engine failed. And assuming an alternate power scenario with the right IDG and right Backup having been the power source, the APU/RAT would come online even though the left engine was still functioning.
@Tim asked what is the evidence you have for an autopilot ‘on’ flight from 1941z?
If there is only one automated path the meets unbiased criteria for an acceptable solution, it is very unlikely that this path was not followed. As I’ve said before, the challenge is to show that the criteria is proper and unbiased, and the path uniquely satisfies the criteria. In the next paper, we’ll learn more about this.
This is important, if it was off, MRO would have entered a right-hand roll and steep spiral descent as soon as the right engine failed.
If the left engine was still operating and the main left bus or the left backup generator was supplying power to the left transfer bus, then the flight control mode would remain as NORMAL and the thrust asymmetry would be mostly compensated after the right engine failed.
And assuming an alternate power scenario with the right IDG and right Backup having been the power source, the APU/RAT would come online even though the left engine was still functioning.
True, after their respective delays. In the alternate configuration, as the right engine spooled down, the thrust asymmetry compensation (TAC) would be progressively applied until the flight control transitioned to SECONDARY with the loss of power to the right transfer bus. Then later, after the left engine failed, the TAC would remain frozen, and the aircraft would yaw and bank to the left.
@all:
Does anyone here have contacts at Malaysia Airlines ?
I was thinking that it would be very interesting if they compared MH370’s data and ATC coms to previous flights.
Some examples that come to mind:
– Did the pilots always read back the frequency at handover ?
– Did the pilots ever report arriving at/maintaining a specific altitude? Twice?
– Were any stats out of the ordinary?
– Anything (occurring prior to IGARI) that was different than at all other flights?
There might be clues buried in a comprehensive comparison of flight characteristics/statistics.
@Victor Iannello
Victor, somewhat off piste to the current discussion, can I please ask what is your understanding of the FBI’s involvement in the investigation.
@Victor
If there is only one automated path the meets unbiased criteria for an acceptable solution, it is very unlikely that this path was not followed. As I’ve said before, the challenge is to show that the criteria is proper and unbiased, and the path uniquely satisfies the criteria. In the next paper, we’ll learn more about this.
I am waiting, but running out of patience.
@TBill
Victor wrote: Shortly after (15:54:53), the VHF ACARS link was lost and subsequent ACARS messages were sent via SATCOM. Yes, in order to disable ACARS you need to first turn VHF mode from data to voice, and that leaves a record in the SITA protocol. Now if that had happened after the aircraft was “taken over”, that means shortly before the diversion, then it would be clear even to the die-hard accident proponents that this was an intentional, nefarious act. Also, Z. arrived early in the cockpit. That means he would be the natural suspect if he turned off ACARS VHF, while on his own, without instruction.
Any possible further conclusion would depend on what the standard policy is. Again, I would have thought that if it is general company policy to turn off ACARS VHF mode for any flight to China, that there would be no special message. Pilots would simply know it. If it is general policy to turn off ACARS VHF mode AND send a message requiring the pilots to do that, than this specific flight to China was ideal for one of the pilots to disappear without leaving a trace. If, on the other hand, MAS OPS does not normally send such a message, and the pilots turn off ACARS VHF mode at some point later during the flight, then yes perhaps this could be seen as a coded message.
@DennisW
Please accept our apologies that you are having to wait for the next paper and are running out of patience.
It is a hell of a lot of work!
We have tons of stuff. Fuller explanation of the method, more analysis, more precise results, test cases, sensitivity studies, …
In short, the paper will not be short.
@Andrew. Given that high altitude reduces the prospect of an engine relight the question arises as to what is its effect on the APU auto-start probability? Had that failed but another succeeded at lower altitude that could bring the log-on BFO timing more into line with the Boeing simulations. Something needs to.
As a corollary, with no engine relight at high altitude, as you know the RR would have shut down when its N3 dropped to 35%, with no prospect of a relight thereafter. Thus an aborted APU start would remove the possibility of a relight affecting the descents simulated by Boeing. That would leave just the drag from the APU’s open inlet during the first start attempt, plus 30-40 secs either side, while that opens and closes, unsimulated. (I leave aside the simulation verification issue).
The APU has a centrifugal compressor, which should have a less sensitive airflow than the main engines’ axial. At the same time the total air pressure recovery at its compressor inlet will be less given its bent intake, its intake being in the fuselage turbulent boundary layer, airflow then being split between it and its pneumatic load compressor, and the intake air providing a cooling bleed; less that is when compared to the recovery to be expected in the engine intakes. Also, in the air, the APU’s lubricating oil heater is powered by the right main ac bus, so de-powering that could increase starting drag had there been several-hours cold soak at altitude.
Given the delay from an aborted start and its likely increase on descent rate, the 00:19:29 LOR might not have been transmitted when the aircraft had a low ROD. However, you are aware that Holland (DSTG) allows up to 14,800fpm for that, the associated 00:19:37 LOA descent rate being 25,300fpm, with the approx. 0.68 ‘g’ descent acceleration between.
As to whether this hypothetical transmission delay might have increased the chances of the link to the satellite failing due to aircraft attitude, should this LOR have failed the Safety Investigation Report (p384) implies that re-transmission would employ the low gain antenna. Since in the event the LOR was recorded at the high gain antenna frequency it would seem that attitude did not intervene.
(The 8 secs between LOR and LOA indicates that there was no need for LOA re-transmission.)
Also, a log-on delay like this after an the increased descent would lead to those transmissions having been from a lower altitude, possibly offering a smaller prospect of recovery, manned or not.
So those transmissions being the result of a second APU auto-start would go some way to reconciling Boeing simulations with an assumption that there were no pilot inputs from the time of the final course being set.
Thus a question is whether flight testing of APU auto-start at high altitude has demonstrated that it could be relied on to auto-start there. If not, or it faltered, another question is whether a second auto-start would be attempted, and in time, once the first failed. The Training Manual (TM) says, “You can try 3 APU starts in a 60 minutes period with the electric starter motor.” It does not say what the minimum gap between first and second should be or whether that is just guidance.
The TM acknowledges that there can be ignition failure during a start.
To me the nominal conditions for an auto-start are repeated at shut down from an aborted start, those being no transfer bus power, aircraft in the air. While a pneumatic start would not be available for either start, the APU battery could well provide for a second try, given the three starts mentioned above, supposing that limit is dictated by battery re-charging. If for APU cooling, delays between the starts would not apply anyway since the APU would be cold; even if the starter motor isn’t.
So questions are to what altitude, installed in the aircraft, has the APU auto-start been verified (the TM just lists its sea-level operating limits) and whether its auto-start initiator, the ELMS, and controller, the APUC, would set it starting a second time, where the higher air pressure lower down might help, and in time.
The TM says, “To shutdown the APU after an autostart you must first move the APU selector to ON and then back to OFF”. However it does not describe what shuts it down if there is just an auto-start attempt. However it does say elsewhere, “During an APU start, if the APU stops its acceleration for more than seven seconds, the APUC shuts down the APU.” It does not say though what shut down procedure would be followed or how long that would take – the normal shut down above 14,000ft (Aircraft Maintenance Manual (the older TM 22,000) takes about 4 mins, much of it for general cooling; below that, 3.
The TM does say also, “APU engine RPM must be less than 12 percent RPM and the air inlet door must be fully open before the start.” However the circumstances envisaged there are unclear since normally the inlet door starts to close on run down to 15% and it needs to be must be fully open a restart will commence.
Perhaps you have access to the APU manual or another source of information on this and other questions? I have found nothing in the FCOM and test bed reports that I have are not pertinent.
One other thing. While able to deliver 120kW AC at all altitudes, APU fuel consumption during SDU reboot would rise a little at a lower altitude and would step-increase beneath 22,000ft, when it would start assuming pneumatic load. The pneumatic delivery would power the air driven hydraulic pumps (supplementing the RAT hydraulic supply) and the environmental control system. However there should be enough fuel for the reboot providing aircraft attitude did not reduce that accessible. That has not been modelled or I believe flight tested. About that, in the ALSM simulation where the engines suffered fuel exhaustion together, there was what appeared to me to be a second APU start, when the aircraft nose was high. It stopped again when the nose dropped. However I might have misinterpreted the indications of that.
I’ve never been a big fan of the negotiation theory.
At that time of night with most of the chain of command leading to Najib Razak in bed, the perp would likely have run out of fuel before any meaningful negotiations could be concluded.
The stakes would be raising by the minute and ‘the house’ (i.e. the government) is going to win. Better to negotiate on the ground. Also with the plane going dark how could reliable communications be established?
If it comes under the category of a rumour that started to circulate once no wreckage was found in the initial surface search then the cynic in me would dismiss it as a manufactured theory – just like so many of the others.
Returning to the topic of discussion I’d just like to say thanks once again to the authors- this discussion has underlined the possibility that someone was in control right to the end.
I remain confident that reasoning and refinement of the analysis of what we do know will be what allows this plane to be found.
@Ned wrote “Yes, in order to disable ACARS you need to first turn VHF mode from data to voice, and that leaves a record in the SITA protocol.”
Switching VHF3 from data to voice leaves no record.
It seems that every attempt @Ned makes to assert a fact, when making a comment here, involves incorrect information.
Suffice to say, the remainder of that >comment is nonsense.
@Don Thompson said: Switching VHF3 from data to voice leaves no record.
At 15:54:31, the ACARS link was VHF, and after MAS OPS advised 9M-MRO to switch VHF3 to voice, the SATCOM link was established and the VHF link was reported (over the SATCOM link) as lost. So it would seem that if switching VHF3 from data to voice changes the active link, there would be a record.
On the other hand, to address @Nederland’s comment, those conditions were not met in flight, as the active link was already SATCOM.
@Nederland
If you and Victor are correct about the record, that would be another reason for picking the Beijing flight, aside from 2 crew members and other factors. DennisW always wondered the reasons. Also the Chinese NoK PAX leader believes (incorrectly) that mechanical failute is indicated due to lack of signal …he is convinced there would be an automated signal from the aircraft if comms were cut by the pilot. @Haxi was going to follow-up with him for me.
@David
If engine re-light is difficult at higher altitude, then you gave me another point for my list of 10-possible reasons why the pilot did an intentional dive at the final BFO.
@Tom O’Flaherty
If we accept William Langewiesche and ALSM’s re-confirmation that intentional depressuization seems to be the logical deduction at IGARI, I agree it seems that negotiation (if any) was over by the time aircraft reached IGARI.
I have just added a new page (July-2019 Addendum) to my Freddie/@TimR rumor essay reflecting that the actual ultimatum threat might have been crash of aircraft, whereas surrenduring to authorities in Jakrata was a bluff. I also mention it is not just TimR’s account, there were similar rumor accounts in social media, which again are difficult to verify.
https://twitter.com/HDTBill/status/1080510470841348096?s=20
@Richard
My comment was not intended to be negative (although it came out that way). Please ignore it. I do appreciate the difficulty.
@Ned,
The statement “Yes, in order to disable ACARS you need to first turn VHF mode from data to voice, and that leaves a record in the SITA protocol.” is incorrect.
If the statement refers to circumstances at 15:54:53, where ACARS over VHF data service was disabled, then it’s incorrect to say “you need to first turn VHF mode from data to voice. My observation, reading the ACARS Traffic Log is that intervention was first made at the ACARS Manager, before the operating mode of the VHF-C radio was reported.
As ever, there is technical nuance in the operation and control of the datacomms services.
VHF data comms, as existed on 9M-MRO, would be termed 'AoA', ACARS over Analogue (radio). That implementation is very basic and does not involve an underlying link layer function. The implication of this statement is determination for a failure is only possible when an expected message is not received, e.g. a periodic broadcast from the ground network, or an air-to-ground transmitted message is not acknowledged.
At 15:54:31 the ACARS Log shows that MAS OCC sent the msg instructing the crew to change the state of VHF3;
At 15:54:41 the ACARS Log shows an SA msg indicating that SATCOM is the active medium, SATCOM AND VHF remains available;
At 15:54:53 the ACARS Log shows an SA msg indicating that VHF service has been lost.
The ACARS Log shows that VHF was regarded as available for data service when the SATCOM became the active link, then some 12 seconds later the VHF service was lost.
The determinant action to make SATCOM active was to uncheck VHF in the ACARS Manager screen.
The remainder of the comment above is irrelevant. The instruction to manually control the active data service, VHF vs SATCOM, was driven by the compararive cost of using ARINC/AEROTHAI’s communications services vs SATCOM within the service scope MAS contracted with SITA. Relying on the default priority/selection choice within DCS for VHF would mean roaming onto the ARINC/AEROTHAI VHF network. ARINC/AEROTHAI provide services throughout much of SE Asia.
[*] DCS – i.e. all elements related to Data Communications, including the AIMS Data Communications Management Function.
@All: For improved security, I have implemented https on this site, which only allows encrypted data exchange. The site should automatically redirect http requests to the https protocol. Please let me know if you are experiencing any problems caused by this change.
Apologies, correction required above (so many acronyms):
“would be termed ‘AoA’, ACARS over Analogue (radio).”
should read
“would be termed ‘POA’, Plain Old ACARS.”
@David
RE: ”Thus a question is whether flight testing of APU auto-start at high altitude has demonstrated that it could be relied on to auto-start there. If not, or it faltered, another question is whether a second auto-start would be attempted, and in time, once the first failed.”
The APU in-flight start is very reliable, even when the APU is cold-soaked. The EDTO (formerly ETOPS) guidance material states that ”It should be shown that there is a very high probability that, after the failure of any one or two generated sources of power, the APU can be started without delay at any altitude up to and including the aeroplanes certificated altitude.” The airline where I work regularly conducts APU in-flight starts as part of its APU health monitoring program. The APU is cold-soaked for several hours during a scheduled flight and is then started at any level above FL300. The APU is required to start within three attempts, but in my experience it has started on the first attempt every time. The start is normally conducted towards the end of a flight, after the aircraft has reached its highest cruising level, typically around FL390.
I think the APU autostart would be similarly reliable, except in the case of an inoperative APU oil heater, as you mentioned. The TM states that the heater ”increases starting reliability when the APU has been cold-soaked”. I know the APU autostart function is checked during some airworthiness test flights, but I do not know the altitude at which the check is conducted.
The autostart is initiated by a signal from ELMS to the APUC upon loss of power to both transfer buses. The manuals do not describe what happens if the autostart fails, but I suspect there would only be one attempt. If that failed, the crew would be alerted and would then need to attempt a manual start. The APU start limitations are intended to prevent the starter motor overheating. The time limit between start attempts is one minute.
@Victor – Thank you for the update to the secured site. There are no error messages and the blog loads smoothly for people like me who read this thread several times each day.
@ST: Thank you for the feedback!
The way ACARS is disabled is described in the SIR, p. 375f.:
On the event flight, voice was selected for the Center VHF on the ground which resulted in the ACARS using SATCOM for the data transmissions, as shown in the SATCOM Ground Station Logs … If both boxes are deselected, ACARS loses the capability to send downlink messages, but can receive and display uplink messages.
So, turning ACARS VHF from data to voice does leave a record.
It is still not clear if MAS sends such a message, advising any flight to China to force the system into SATCOM mode, regularly as part of the ground briefing. As far as I know, the VHF link works with no roaming charges for Malaysia and Vietnam.
@Andrew. Much obliged. That possibility gets bowled out therefore except for a special circumstance and one that would not allow the ALTERNATE configuration.
I was about to raise an erratum to what I had said and thank you for not being distracted by an error or two.
So under the assumption that a left engine relight is unlikely, in my opinion the final descent criteria remain inconsistent with Boeing simulations, the last possibility to correct that now being the inclusion of the effect of a first-try APU auto-start.
Supposing engine windmilling hydraulics and RAT deployment are simulated already, the principal effect from an APU start most likely would be reduction to left roll rate from any flaperon asymmetry induced by RAT deployment. This asymmetry would arise only if the L1 and right ACEs had both been unpowered by PMG and, in the L1’s case, the small battery powering the left PSA had been exhausted.
That effect or none, APU power would tend to stabilise the aircraft, so reducing further the chance the aircraft would meet those descent criteria, while the APU was running at least.
In my view that reinforces the descent being man-made and reduces the simulations’ standing both as support for the current interpretation of the BFOs and as the basis of unmanned search width. However the interpretation of the BFOs can stand alone anyway and the simulations have neither the sample size nor fidelity to set search width. To me that depends instead on the likelihood or not of a person inducing a rapid descent then recovering. I think that unlikely.
A conclusion that most likely the descent would continue would be the basis for replacing simulator predictions.
@Victor. No problems down where I am.
@David: I think you are landing the same place as me. The base case is a crash close to the 7th arc, whether the dive was controlled or not controlled, and this should be used to define the primary area. However, the possibility of a recovery glide cannot be dismissed, and should be used to define the secondary area. If there was a dive-glide-dive, I think it is likely that the plane continued on the due south path (or close to it), since we believe that was the course for the preceding 4.5 hours.
@All: There is an excellent article in The Telegraph about the MH370 investigation, including references to the French investigation. There are many sensible quotes from Mike Exner.
@Victor
You stated “However, the possibility of a recovery glide cannot be dismissed, and should be used to define the secondary area.”
I disagree. A glide can be dismissed.
Andrew has shown that an APU start is almost guaranteed even at altitude.
He also has shown an engine restart is unlikely at altitude and can be dismissed, otherwise we would not have seen the SDU reboot at 00:19:29 UTC.
Don has shown that the IFE system message would be repeated within a short timeframe, if the aircraft attitude was an issue, and repeated until an acknowledge was received.
In a glide the aircraft attitude is not an issue for satellite comms.
Don has also shown that if the satellite connection was lost, a new logon request would be made after a short timeframe.
Don and Andrew have shown that the IFE switch on the overhead panel does not effect the IFE comms, by inspecting the work instructions of the AD.
Andrew has shown that a downward acceleration of 0.67g can only be achieved with pilot input.
Bobby has shown that the alternate electrical configuration does not fit the data we have.
The RAT does not power the SDU.
I do not see any possibility of a glide scenario.
@Richard: We don’t know for sure that the APU was running after the last AES transmission. Extreme attitudes could have led to lowering the tank level below the pipe inlet.
From a practical point of view, if OI decides to search a 30-NM radius around the hotspot at -34.3,93.78 and comes up empty, I would recommend continuing the search to the south based on the possibility of a glide. If there were no possibility of a glide, it would be pointless to continue the search.
@Victor
From a practical point of view, if OI decides to search a 30-NM radius around the hotspot at -34.3,93.78 and comes up empty, I would recommend continuing the search to the south based on the possibility of a glide. If there were no possibility of a glide, it would be pointless to continue the search.
I find your comment a bit unsettling since the “hotspot” to which you (and others) refer has not been subjected to peer review.
@DennisW: It was a hypothetical, not a recommendation. On the other hand, if the analysis shows that the BEDAX-SouthPole path is objectively the “best”, I think a recommendation similar to that is in order. We’ll see.
@Richard
As I see it, use of the “missing IFE” to justify the “no glide” assumption, itself depends on the assumption that it should have been received, because the primary assumption is that the APU was still running at the time the IFE logon was expected.
But, the question is, was it “still running” ?
APU run time depends firstly on what amount of fuel was actually able to be supplied to the APU, and secondly, whether or not it could all be pumped to, and or sucked through the line, to actually keep the APU running.
My reading of all the APU fuel discussions does not convince me that the APU “must have still been running” for the IFE logon, given the length of line, attitude, fuel slosh, g-loads, pump inlet placement etc etc.
In short, I think it is a brave leap to assume the APU kept running throughout the descent as most seem to have assumed and accepted.
If we can not determine “with certainty”, that the APU was not starved of usable fuel at some point prior to the expected IFE log on time, then logically, we can not determine, “with certainty”, that it was still actually running, and powering the SDU.
Without that certainty, the “no IFE” logic to justify the “no glide” determination, falters somewhat, in my opinion.
I now see that Victor has made a similar comment re APU run time.
Question r.e. frequency calibration in the SATCOM system.
It has been suggested (I believe it was ALSM) that the SATCOM on MH370 carried out a recalibration of the onboard OCXO, causing a jump in the BFO of 16 hz. Is there any other recalibration done along the signal chain from the aircraft to the output of the receivers at Perth? In particular, would the reference frequency generator onboard the satellite also be recalibrated periodically? Or possibly that of the ground station (seems less likely)?
@sk999: First, here is what we know from the ATSB:
There is an automatic SDU calibration process to correct log-term OCXO drift. Analysis of the GES logs from 9M-MRO from 04/03/14 to 08/03/14 shows three such probable calibration events at: 04/03/14 11:43:32 (-15Hz), 06/03/14 00:35:25 (+16Hz) and 07/03/14 16:00:28 (-17Hz). The actual adjustments will have been +/-16Hz, and these three calibrations appear to show a system adjusting around nominal as seen in SDU logs from other aircraft. This calibration is performed after logging-on and, if necessary an adjustment is made. For an adjustment to be made, one hour must have elapsed since power on, and 26 hours of on-time must have elapsed since the last adjustment. It is not possible to know from the GES logs, when and for how long, the SDU on board 9M-MRO had been powered on prior to flight MH370.
We also know that the GES is synchronized to a very accurate, stable oscillator, and the MITEQ pilot receiver compensates both for long term frequency drift of the satellite and diurnal frequency variations due to Doppler shift. It would seem that there is no need for re-calibrations other than the AES.
@Victor
Concerning the statement from the ATSB, “It is not possible to know from the GES logs, when and for how long, the SDU on board 9M-MRO had been powered on prior to flight MH370.”
With sight of the full Stratos GES Log, showing the complete set of metadata for each record, it is possible to know when and for how long the AES had been powered on prior to flight MH370.
9M-MRO made an initial Log On with POR at 12:50:19UTC, it remained powered before it executed two Log On renewals via POR at 15:55:57 and 15:57:49, then commanded a Log Off from POR, immediately followed by an initial Log On with IOR at 15:59:55.
The APU shutdown report, generated at push back time, shows that the APU run time was 4 hours (rounded). The APU report corroborates my reading of the GES Log that the AES was powered on throughout the period from 12:50:19UTC.
@Don Thompson: I don’t think this was in question after Ian Holland released his paper. He uses the GES logs to determine the range of time that the SATCOM was shutdown prior the log-on, and reported the results in Table II. That table shows no power-ups between 12:50 and 18:25. The statement from the ATSB preceded Holland’s work.
@Victor,
I agree with your comment.
My intent was to point out, that with the information now to hand, we can be confident about circumstances for the period 12:50 through to the calibtration event at 16:00:28
@VictorI, others
Is it known what the calibration “target” / criterion is for applying this +-16 Hz adjustments?
@ Ventus45
ATSB confirms there was at least 30 lbs of fuel for the APU in the fuel line, which is sufficient for 13 mins 45 secs under load.
Andrew confirms that the APU is very reliable to start and to continue once started.
I have no reason to believe that the APU died after 89 secs.
@Niels: The frequency error is generated by the difference between the received and expected frequency of the P-channel signal. Because that signal is not pre-compensated for Doppler shift (I think), the calibration will not be “exact”. As the BFO is around 150 Hz and not zero, that means there are other offsets in the path, including the Doppler shift.
@Richard: Here’s what the ATSB says:
The APU fuel inlet is located in the left main tank. The APU is estimated to consume (when electrically-loaded) approximately 2 lb of fuel in 55 seconds. In a standard flight attitude (1° pitch), the difference in location between the left engine fuel inlet and the APU fuel inlet would result in approximately 30 lb of fuel being available to the APU after a left engine fuel exhaustion. From this information, the APU had a maximum operating time of approximately 13 minutes and 45 seconds. The pitch attitude would have an effect on the usable fuel for the APU; an aircraft not under control may exhibit dynamic changes in pitch attitude (i.e. phugoid motion) which could have limited the APU’s ability to receive fuel. In-flight acceleration forces could also affect the distribution of fuel in the tanks.
First, once the fuel level fell below the APU fuel inlet, it is doubtful that any fuel in the fuel line would be available to the APU. The DC pump would cease to pressurize the line, and likely the line would cavitate, especially at high altitude.
Second, we don’t know if there was an extreme attitude that caused the level in the tank to fall below the APU inlet. If this occurred for any significant length of time, the APU would likely run dry.
It’s possible that the APU continued until impact, but I don’t think we know this for sure.
I am glad to see that the BFO issues are being revisited. I am in the process of consolidating some of the published evidence and trying to locate some of the studies I circulated to the IG in 2015 or so.
I see the issue a little differently.
The ATSB published a graph showing the effects of the solar eclipse of the satellite and indicating that this would produce an uncompensated error of about 8Hz. (I believe that the error is slightly greater. The initial analysis used linear interpolation between the ping times.)
I digitized the Fig. 12 and 13 of the Inmarsat paper and was able to show a high correlation between the temperature variation of the translation oscillator and the frequency variation. Thus, although only measured at the pings, we have a continuous trace of the actual frequency error due to temperature variations in the satellite. There are smaller frequency corrections that can be made (due to the eclipse effect) at the 1941 and 2141.
I determined a coefficient relating temperature and frequency error, but omitted to look into the resultant statistical error in using the coefficient. If we posit that most of the variation in BFO is related to the temperature variation of the translation frequency, then the difference between the calculated (using temperature) and the measured oscillator frequency would yield a residual which could be taken as an estimate of the actual statistical error in this measurement.
I was prompted to revisit the subject by the recent citing of Fig. 5.4 of the DSTG report where BFO residual data for a flight of 2 March exhibits a large excursion in the 22h region. Both the magnitude and the shape of the deviation are consistent with Fig.12 of the Inmarsat paper and is likely to be a thermal effect. As such the large estimated error used by DSTG seems to me to be in error and means that the model is not as sensitive to the actual measured values as it should be.
I will attempt to organize some of this data this week.
@Victor
You cannot have a long glide scenario and at the same have an extreme aircraft attitude.
@Richard: “Extreme” was probably not the right word. We’re really talking about a change from the 1° of pitch that was used to derive the estimate of 30 lb of available fuel for the APU. In the dive-recovery scenario, you could have both nose-down and nose-up pitches much different (>10°) from 1° before the plane enters the long glide. Even during the glide at an efficient speed close to the MMS, the AoA might be around 6° and the FPA around -2.4°, with a pitch of around 3.8°.
Based on what we know, I think it is premature to assume a glide did not occur.
@Victor
I am happy to hear that you do not exclude the jump scenario. In this context it is interesting that you point to the Nicobar islands as the most likely place(s). Initially I thought the same. However, I had problems making the fine details fit, and at the end there was only one of these islands which I could not exclude totally.
For this particular island there was a funny coincidence that I noticed. At some time in 2017 one of the national German television channels (ZDF as far as I remember) sent one of their best reporters to that particular island to make a comprehensive report. His report was well made but quite uninteresting. At the time I had the suspicion that someone had the same idea as I and that was the true reason for sending the excellent journalist to an otherwise uninteresting and extremely remote place.
It may of course also have been a completely random coincidence.
@Viking: Please be aware that when I say I don’t dismiss or exclude a scenario, it doesn’t mean I think it is likely. The coordination with collaborators that is required both at KLIA and at the jump site are obvious weaknesses of this scenario.
@Victor
My point is that an abnormal aircraft attitude would not last long and with an IFE system message being repeated every 8 to 15 seconds until acknowledged, the argument based on a continuing aircraft attitude is not valid.
@Victor
I would also like to add that I do not exclude the suicide scenario. However, my worry is that setting course directly for the South Pole excludes any other scenario. I would be happy to see more discussion of that particular (partly overlooked) detail.
@Viking: It is a common misconception that the use of the BEDAX and SouthPole waypoints is an assumption of the analysis. Rather, a path following those waypoints is derived from an analysis that attempts to use an unbiased objective function to discriminate among all paths.
@Victor
The coordination is indeed tricky for the jump scenario. However, I am sure Shah had connections in many places after so many years as a pilot. The need for coordination is also a good explanation for leaked information (eg. via @TimR). For the suicide scenario I have severe problems understanding these leaks.
@Victor
I agree that you have deduced the South Pole direction so the suicide is not by any means a direct assumption. The problem is that it becomes an indirect one if other assumptions lead to this and only this solution (S.P. course).
Victor,
OK, thanks. The spec for the MITEQ receiver says it has a “frequency range” of +/- 50 khz, so I guess that is enough to compensate for satellite oscillator drift over the life of the satellite.
@VictorI
About the frequency calibration you wrote:
“The frequency error is generated by the difference between the received and expected frequency of the P-channel signal.”
Ok, thank you. Is it correct that the calibration is only carried out with the aircraft stationary on the ground? In which case the relative satellite motion may still impact the calibration.
@sk999: I’d be interested to see where you saw the “frequency range”.
The MITEQ receiver has an “acquisition range” that is settable between +/- 1 kHz and +/- 55 kHz, which is the bandwidth for acquiring the pilot signal. The LTE can be set to within +/- 999.999 kHz, which I assume is also the range of LTE that can be automatically tracked and compensated.
@Niels. I believe so because it would make sense, but I’m not sure. In any event, there was no recalibration during the flight because 26 hours of on-time hadn’t elapsed since the last recalibration.
Victor,
Here’s the document I came up with after a brief search:
https://nardamiteq.com/docs/D-169.PDF
No idea if it is the actual model installed at Perth. “Frequency Range” is in the section “Acquisition/tracking characteristics”.
@Richard. Supporting what @Ventus and @Victor are saying (and I implied), a momentary uncovering of the APU DC pump inlet could flame out the APU once the ensuing air or vapour bubble reached it.
There is of course the question of it being restarted, even manually, but that would have led to another LOR.
@Andrew, ALSM. If a future search supposed that the priority was to search within the likely radius of an intent to continue rapid (as per the LOA) descent, the question is what would that be?
One issue is the possibility of pitch-up when unbanked.
In investigating the Silk Air 737 crash, Boeing concluded from simulations (ie presumably within the 737’s data base) that the aircraft would have pitched up at very high speed if full manual nose down trim had not been applied or alternatively the pilot applied a 50 lb nose down force to the control column. That was with both engines running so full flight control hydraulics.
You will see where I am going with this. With APU running and an aircraft of a similar wing sweep and taper, would there be a similar nose up pitching moment is one question. A second is whether loss of the APU as above make a difference?
I note that Boeing/ATSB made no mention of this as an outcome of 777 simulations, simply mentioning that in some the aircraft exceeded the data base. Implicitly, nothing similar could be expected within the 777 data base.
Can you throw any light on this from your experience?
Incidentally Andrew, having racked my memory I can add a better rationale for the APU having a more reliable start at altitude than the main engines. Combustion chamber/atomiser/injector etc design, two generations ago anyway, could be optimised for flame stability at altitude or economy. You will recall the smoke trails left by the early 707’s; and military aircraft, US in particular, where the trade off was more flame stability versus visibility.
I suppose that the main engine trade off these days allocates a higher priority to pollution though in the APU’s case, noting its relatively low fuel consumption, that is not such an issue; so carbon content in its exhaust is more acceptable. Even so I have a report about Zurich airport and the monitoring of ground APU-running there from the pollution perspective.
@sk999: That’s what I thought. I don’t believe the acquisition range is the same as the LTE range, as I said above.
@David
@Richard
I agree with the previous comments regarding the likelihood of an APU flameout. A small nose down change in the pitch attitude could easily uncover the pump inlet and disrupt the flow of fuel to the APU, given the small quantity of residual fuel in the tank. My earlier work/comments were not intended to imply the APU would keep running until all the residual fuel was exhausted.
@David
RE: ”With APU running and an aircraft of a similar wing sweep and taper, would there be a similar nose up pitching moment is one question. A second is whether loss of the APU as above make a difference?”
1. I would think so. The FBW control laws would take care of any change in the aircraft’s longitudinal stability at high speed (eg Mach tuck, if any) and the aircraft would tend to return to its previously trimmed speed.
2. I doubt it. The left elevator would remain powered by the C hydraulic system (via the RAT) and controlled by the C ACE. The FBW control laws should continue to maintain the aircraft’s stability, which would tend to pitch the aircraft nose-up if it were flying faster than its trimmed speed.
RE: ”You will recall the smoke trails left by the early 707’s; and military aircraft, US in particular…”
The older designs certainly produced a lot of smoke (and noise):
https://i.pinimg.com/originals/36/e4/31/36e4314837fa2aafa4253a5a1ed4067f.jpg
Fortunately, those days have long gone!
RE: ”I suppose that the main engine trade off these days allocates a higher priority to pollution though in the APU’s case, noting its relatively low fuel consumption, that is not such an issue; so carbon content in its exhaust is more acceptable. Even so I have a report about Zurich airport and the monitoring of ground APU-running there from the pollution perspective.”
Even so, airports around the world are becoming increasingly sensitive to pollution from APUs. At many airports the APU must be shut down after arrival and only re-started shortly before departure.
@Andrew. Thank you. In either case no pitch up in this aircraft with its FBW.
Re your photo, at least that might show those behind where wake turbulence is!
@Andrew. I wracked my memory again for how to spell racked.
@David: In your scenario of large nose-down elevator input followed by release of the column would provide a large perturbation for an extended phugoid. I don’t believe there would be a sudden pitch up when the column is released.
@Victor. What I was wondering was whether there would be sufficient 777 pitch up moment to result in a pitch up. @Andrew has indicated that the moment would be countered by FBW so that would not arise, as I understand it.
@David: As far as I can tell, whether in NORMAL or SECONDARY control mode, with hands off the column and level wings, the vertical acceleration is limited to around +/- 0.3g and the pitch changes slowly unless in NORMAL mode and overspeed protection kicks in. If you have a specific case in mind, e.g., flight control mode, engine thrust, speed, etc., I can run it on the sim to demonstrate this.
@Victor. I may not be understanding you. The question I raised was based on whether the 737’s tendency to pitch up at transonic speeds without a substantial manual input to correct this would lead to a like pitch up tendency in the 777 such that MH370 would fly farther than in a straight line accelerating descent. I had it in mind that the person at the controls might not prevent that but am now reassured that the 777 fly-by-wire pitch stability would obviate it anyway.
Hence there is no specific case I have in mind: it is general. To summarise, there is no risk from that hypothetical so, as I can see it, the issue is resolved.
@David: I thought your question referred to a nose-up pitch response. Mach tuck causes a downward pitch, doesn’t it?
In any event, if your hypothetical doesn’t occur, the issue resolved, as you say.
@Richard
“Don and Andrew have shown that the IFE switch on the overhead panel does not effect the IFE comms, by inspecting the work instructions of the AD.”
The switch does not affect power to the back end however if the cabin clients are not powered up when the server boots up, then boot time may be extended to allow more polling time. CPU cycles may be consumed generating an error dump etc.
Has this possibility been considered?
@flatpack
Don analysed the various instances where we have the data and timing for the IFE system message following a SDU reboot.
There is quite a range of timing from 62 secs to 156 secs.
There are obviously reasons for this wide range of timing.
I took 3 minutes as a safe assumption.
I can only hope my assumption covers the majority of possibilities.
Since a long glide would take more than 10 minutes, there is a certain margin.
@Andrew
APU questions-
a) I assume APU can be manually turned on when engines are on
b) Does the APU have a visible (flame) at night?
c) What does flame out of APU look like at night?
d) What would be eco-issues with APU? I know there can be around 2000 ppm Sulfur in there, unlike gaso and diesel the sulfur I think is still allowed in there to keep jet fuel cost as low as possible
I never could find a picture of main engine flame out at night.
Re BFO calibration and accuracy…The pilot receiver acquisition range has nothing to do with the accuracy of the BFO values. The accuracy is a function of the reference oscillator accuracy only. The GESs have a “station standard” (typically a rubidium reference) that is distributed to all CUs (demodulators). Thus, the error contributed by the pilot receiver and demod’s is <<1Hz. The dominant error in BFO observations is the small SDU OCXO drift. Everything else has been calibrated out very well, including the eclipse induced anomoly.
@airlandseaman said: The pilot receiver acquisition range has nothing to do with the accuracy of the BFO values.
Nobody said this. @sk999 asked whether other components in the link could also recalibrate like the AES. We know the GES does not because it has an accurate reference that is used by all the GES components. My claim was that the satellite also does not undergo a recalibration because the long-term drift is compensated in the pilot receiver, which can accommodate a lot of long-term drift of the oscillator in the satellite.
I suspect the fact that the BFO is not zero after a recalibration on the ground is partly due to uncompensated Doppler in the pilot receiver.
Victor: I agree with all that. All the transponders are sync’ed to a common (free running) reference oscillator on the s/c, like the GES, but it is not a high accuracy reference like the GES uses. It does not need to be as accurate because, as you note, the pilot system compensates for the s/c reference oscillator error and drift over time.
@All
More details on suicide and South Pole directed route:
In case we accept suicide as the cause, it is still worth digging one level deeper into the details. From everything we know about MH370 it is clear that a lot of effort was put into hiding the route and end destination for the airplane. This must mean that we are dealing with a concealed suicide. In other words the perpetrator wanted us to believe that it was not suicide, but rather some kind of accident. While this is possible, there are a number of inconsistencies in the details. We have already discussed some of the leaked information. This is all quite strange, but unfortunately we have no way of knowing if large parts of it may be false or misleading.
However, we do know one thing for certain. Immediately after the airplane left radar coverage the SDU was turned on again. This is extremely strange in case the perpetrator wanted to conceal a suicide. Actually it seems completely contradictory to all the rest of the events, since it proves that the airplane is still under intelligent control, and now able to communicate again.
I think this is as close as we come to a proof that it was not an attempt to hide a suicide.
@Andrew
You stated “A small nose down change in the pitch attitude could easily uncover the pump inlet and disrupt the flow of fuel to the APU, given the small quantity of residual fuel in the tank. My earlier work/comments were not intended to imply the APU would keep running until all the residual fuel was exhausted.”
We are both agreed with the ATSB statement “the difference in location between the left engine fuel inlet and the APU fuel inlet would result in approximately 30 lb of fuel being available to the APU after a left engine fuel exhaustion”.
In your paper, you state “If the left main tank is empty, the APU DC fuel pump cannot supply fuel to keep the APU fuel supply line pressurised. Continued operation of the APU would therefore rely on the boost pump in the APU fuel cluster to continue drawing the remaining fuel from the APU fuel supply line.”
This statement in your paper appears to imply that the boost pump in the APU fuel cluster would ensure supply of the remaining fuel at least from the APU fuel line.
Are you now saying that the boost pump in the APU fuel cluster would not ensure supply of the remaining fuel from the APU fuel line, if there was a nose down attitude?
I understand “a small nose down change in the pitch attitude could easily uncover the pump inlet and disrupt the flow of fuel to the APU, given the small quantity of residual fuel in the tank” but what about the fuel already in the fuel line?
@David
@Victor
David, I think you may have misunderstood my previous comments. The NTSB and Boeing conducted a number of simulations in Boeing’s M-cab simulator, in a bid to reproduce the descent profile of the Silkair B737. The NTSB’s findings in Appendix N of the Silkair accident report state:
“The engineering simulations just discussed indicated that manual manipulation of the primary flight controls in multiple axes would result in a descent time history that was similar to the last recorded radar points. Without the use of horizontal stabilizer trim, this would require control column forces greater than 50 pounds and large control column inputs; if those forces were relaxed, the airplane would have initiated a return to a nose-up attitude due to its inherent stability. However, the simulations indicated that a combination of either control column inputs and/or changing the stabilizer trim from about 4.5 to 2.5 units nose-down trim (which would have “unloaded” the high control forces) in conjunction with aileron inputs, would result in a descent time history similar to that of the last recorded radar points.”
I believe the B777 would behave similarly, with or without the APU operating.
@TBill
RE: “APU questions-
a) I assume APU can be manually turned on when engines are on
b) Does the APU have a visible (flame) at night?
c) What does flame out of APU look like at night?
d) What would be eco-issues with APU? I know there can be around 2000 ppm Sulfur in there, unlike gaso and diesel the sulfur I think is still allowed in there to keep jet fuel cost as low as possible”
a. Yes.
b. No.
c. Flame-out simply means the flame inside the combustion chamber has extinguished, which results in an APU shutdown. It doesn’t mean there’s a visible flame out of the APU.
d. Noise and exhaust emissions. The following study might be of interest:
Aircraft APU Emissions at Zurich Airport
@Richard
RE: “Are you now saying that the boost pump in the APU fuel cluster would not ensure supply of the remaining fuel from the APU fuel line, if there was a nose down attitude?”
The comment you quoted was not intended to imply the APU would continue running under suction feed. It was meant to highlight that the APU would need to use suction feed if it were to continue running long enough to allow the final SATCOM messages. However, I don’t believe that would have occurred, as was discussed in a previous post:
“I doubt the APU would continue to run after the wing tank ran dry. I note ALSM’s comment regarding the placement of the engine pump and wing tanks in the light aircraft he has flown, but in the MH370 case there is a long fuel line and a considerable height difference between the tank and the APU. The auto start is also assumed to have occurred at very high altitude. @David previously suggested that vapour lock would prevent the APU suction feeding under those conditions and I agree. If the main tank boost pumps fail on one side, the associated engine won’t reliably run by suction feed above FL380. I therefore think it’s unlikely the APU would run at high altitude without boost pump pressure, especially given that it is mounted higher than the tank.”
@Andrew: When it is stated that if those forces were relaxed, the airplane would have initiated a return to a nose-up attitude due to its inherent stability, I interpret that to mean a phugoid would begin, with the nose slowly rising. A high pitch rate up would mean high angle of attack which means high wing loading which means high upward acceleration. I don’t see how any of this is possible with no pressure on the column. And I said in my comment to David, Mach tuck would LOWER the nose, not raise it, as the center of lift moves backwards.
@Andrew: The discussion about the fuel fed to the APU has encompassed many comments and I think the significance may be lost. Here’s what I believe we are saying:
It’s possible and perhaps likely that the nose-down attitude suggested by the final BFO values would uncover the inlet to the APU fuel line, which would starve the APU as the pressure in the pipe is lost. That means the missing IFE log-on request could have been a consequence of the nose-down pitch, and not indicative of an impact that occurred before the IFE log-on sequence began. That means that a long glide is possible.
@Andrew
Many thanks for the clarification!
I had seen the post, but was quoting your paper.
I had failed to understand that your post was a correction to your paper.
@Victor
Many thanks for your summary of a long and complex discussion on a possible long glide scenario.
I stand corrected!
You left out a statement requiring an active pilot to enter a steep descent in order to match the BFO data, followed by the requirement of an active pilot to recover from a steep descent and control a glide at the right speed and descent rate.
Can we assume an active pilot at the end of flight?
@Richard said: Can we assume an active pilot at the end of flight?
I think it is a possibility. I’m not sure it is our base case. Let’s continue to discuss and think about it.
Re: discussion about “…uncover the inlet to the APU fuel line [due to the downward pitch angle]…”
…we do not know the attitude, velocity and acceleration profiles for the entire descent, but we have data suggesting that the average acceleration between 00:19:29 and 00:19:37 was about -0.68 Gs. Given that, is it not possible that the residual fuel was actually sloshing back toward the trailing edge, not collecting at the leading edge? Questions we may not ever answer without the FDR.
@airlandseaman: In your glider, if you push the nose down and enter into an accelerating steep descent, are you pushed forwards or backwards in your seat?
Victor: I rarely do that, but your body would feel “weightlessness” when you move up in the straps and back in the seat. To be clear, I did not intend to infer precisely what was happening between 00:19:29 and 00:19:37. I was simply pointing out that the acceleration during that time suggests some dynamics going on over the descent, and fuel probably sloshing around in the tank. I doubt that it was collecting at the leading edge and staying there.
@Victor
RE: “When it is stated that if those forces were relaxed, the airplane would have initiated a return to a nose-up attitude due to its inherent stability, I interpret that to mean a phugoid would begin, with the nose slowly rising. A high pitch rate up would mean high angle of attack which means high wing loading which means high upward acceleration. I don’t see how any of this is possible with no pressure on the column.”
I agree. I interpreted David’s comment “the aircraft would have pitched up at very high speed” to mean the aircraft would have pitched nose-up if the control forces were relaxed while the aircraft was flying at very high speed. I don’t think he meant the pitch rate would be high. @David??
RE: “And I said in my comment to David, Mach tuck would LOWER the nose, not raise it, as the center of lift moves backwards.”
Yes. I said to David “The FBW control laws would take care of any change in the aircraft’s longitudinal stability at high speed (eg Mach tuck, if any) and the aircraft would tend to return to its previously trimmed speed.” In other words, the FBW would prevent Mach tuck and the aircraft would therefore behave in the conventional sense.
@airlandseaman: I’m not criticizing you. I’m also thinking about these examples before I draw the gravitational and acceleration vectors and show mathematically what occurs.
Yes, you would be lighter in your seat, but also the component of gravity along the axis of the plane would push you forward.
Here’s another thought experiment. Suppose we place a ball in the aisle of a B777 and pitch forward into an accelerating descent. Does the ball go forward or backward?
It depends on the acceleration magnitude…which is why I made the point that I was not referring to the .68G time frame, except to suggest that the accelerations could have been quite variable and over -1 G at times.
There’s another interesting aspect of allowing pilot inputs. When the fuel starts running low, the crossfeed fuel valves can be opened, which means both engines will flameout at nearly the same time, and the fuel range will be maximized. That means the double flameout would have occurred around 00:17.
@Andrew, Victor. My interpretation of the NTSBs passage about Boeing Silk Air 737 simulations that @Andrew quotes remains that the 737 would pitch up as it reached high transonic speeds were there no pilot intervention, ie either full manual down trim (as apparently was applied in the Silk Air case) or, had that not been done, a 50 lbf nose down force by him on the control column.
Mach tuck in that report is described as mild, occurs at high normal cruise speeds, is controlled automatically normally and, were it not, it is easy for the pilot to control anyway.
High transonic pitch up results I believe from loss of lift behind “normal”(ie perpendicular to the airflow) shocks where the airflow is sped up to sonic locally by lift there, ie mainly on the wing upper surface. That shifts the wing centre of lift forward and hence the pitch up moment, or tendency. As I recall this was a problem in some USAF 100 series fighters, uncontrolled pitch up approaching the sound barrier resulting in some cases in loss of the aircraft.
In that quoted description of the Silk Air 737 descent, had full manual nose down trim not been applied it was implied (to me, but see below) the pilot efforts at controlling the consequent pitch up moment might well have been unsuccessful due to the continuing high forces required. The context of that passage was to indicate that unless full manual trim nose down had been applied the aircraft would have pulled out despite pilot efforts, possibly breaking up in mid-air due to wing loading (as distinct from speed related flutter, that did happen).
Since it did not break up in mid air and the impact site was consistent with the descent plotted by radar, the NTSB used this in its assertion that the crash was deliberate. The Indonesians denied that and have since.
What the NTSB was saying was that the full down trim found post crash was not the result of forwards inertia at impact but would have been applied deliberately and disclosed pilot intent.
Now while your answer to my question 1, “..would there be a similar nose up pitching moment” in the 777 you said, “I would think so” but that FBW stability would intervene. I took that to mean that FBW stability differentiated the 777 from the 737. That must be where I misunderstood you.
Your most recent, “I believe the B777 would behave similarly, with or without the APU operating” renews my interest in whether the intent I draw from the LOA descent rate and acceleration, of holding the nose down to impact, would not be realised if the 777 reached high transonic, it “pulling out” despite pilot efforts to counter that (assuming he did not trim nose down) and indeed the aircraft could have broken up mid-air in the process.
Possibly I have misinterpreted what the NTSB meant by, “..the airplane would have initiated a return to a nose-up attitude due to its inherent stability.” as you both imply and that is why I spell out at such length above what I have understood to be its context.
@Andrew
A question.
If we assume APU flameout during descent, due to fuel slosh / momentary starvation (perhaps for some seconds, even tens of seconds), but with fuel still theoretically available, will the APU continue to attempt to restart automatically, or not ?
In other words, is it plausible, that in a phugoid descent, with the pump inlets alternating between being “dry” and being “wet”, might the APU attempt to restart itself again, or is the autostart function a “one shot deal” ?
@Richard
RE: “I had failed to understand that your post was a correction to your paper.”
For what it’s worth, it wasn’t so much a correction as an ‘addendum’! I made the original comment in relation to the Case 2 scenario discussed in the paper, where the engine relit and accelerated slowly to an intermediate thrust setting before flaming out again due to fuel exhaustion. The analysis showed there would be sufficient fuel to also allow the APU to autostart, but that all the fuel in the tank would be exhausted before the SDU rebooted and made the final transmissions. The original comment was meant to highlight that the Case 2 scenario would require the APU to rely on suction feed, using fuel in the APU fuel line, if it were to continue running long enough for the final SATCOM transmissions to take place. The paper failed to reiterate that suction feed was unlikely to occur.
Note: The analysis was based solely on the estimated residual fuel quantity and did not consider the effects of sloshing fuel in the tank!
@Victor
RE: “It’s possible and perhaps likely that the nose-down attitude suggested by the final BFO values would uncover the inlet to the APU fuel line, which would starve the APU as the pressure in the pipe is lost. That means the missing IFE log-on request could have been a consequence of the nose-down pitch, and not indicative of an impact that occurred before the IFE log-on sequence began. That means that a long glide is possible.”
I agree.
@David
RE: “High transonic pitch up results I believe from loss of lift behind “normal”(ie perpendicular to the airflow) shocks where the airflow is sped up to sonic locally by lift there, ie mainly on the wing upper surface. That shifts the wing centre of lift forward and hence the pitch up moment, or tendency.”
Transonic pitch-up occurs primarily due to the tip-stalling tendency of swept-wing aircraft, even at relatively low angles of attack. When the wing tips stall, the centre of pressure (CP) moves forward very quickly, which can cause a violent pitch-up. Mach tuck, on the other hand, is caused by the rearward movement of the CP as the normal shock wave moves rearward at higher transonic speeds.
RE: “The context of that passage was to indicate that unless full manual trim nose down had been applied the aircraft would have pulled out despite pilot efforts, possibly breaking up in mid-air due to wing loading…”
The report only says “if those forces were relaxed, the airplane would have initiated a return to a nose- up attitude due to its inherent stability.” It does not say there would be a violent pitch-up that would cause the aircraft to break up.
RE: “Your most recent, “I believe the B777 would behave similarly, with or without the APU operating” renews my interest in whether the intent I draw from the LOA descent rate and acceleration, of holding the nose down to impact, would not be realised if the 777 reached high transonic, it “pulling out” despite pilot efforts to counter that (assuming he did not trim nose down) and indeed the aircraft could have broken up mid-air in the process.”
I’d be very surprised if the pilot didn’t trim if the intention was to cause a high speed impact. If trim wasn’t applied and the pilot relaxed the control forces (or couldn’t overcome the natural pitch-up tendency), I doubt any subsequent pitch-up would cause the aircraft to break up.
@ventus 45
RE: ‘In other words, is it plausible, that in a phugoid descent, with the pump inlets alternating between being “dry” and being “wet”, might the APU attempt to restart itself again, or is the autostart function a “one shot deal” ?’
As I said in an earlier reply to @David:
The [APU] autostart is initiated by a signal from ELMS to the APUC upon loss of power to both transfer buses. The manuals do not describe what happens if the autostart fails, but I suspect there would only be one attempt. If that failed, the crew would be alerted and would then need to attempt a manual start.
As far as I’m aware, it’s a ‘one shot deal’.
@Andrew. My reading of the report is that as speed increases so does the nose up pitch moment. Once it has increased to 50 lbf down force (more for the 777?)being required, were that released slowly I think pitch up rate would accelerate. If suddenly (in the 777 the pilot was overwhelmed say) then I think it could be violent.
My assumption was that the pilot may not know the extent of the forces building and if he did his mind might be distracted anyway, focussed elsewhere.
However since apparently the 737 pilot was well aware of that in advance while quite possibly in a similar state of mind, that supports the likelihood that the 777 man would apply trim like wise.
That now, is a good reason to put this pitch up possibility aside again, and noting that Boeing/ATSB made no mention of it also suggests it has no likelihood also.
Thank you for your further remarks.
@ Andrew
Thanks, I just wanted to explore whether an APU will auto relight just like some main engines will, i.e. to consider what would (could / might) happen in the APU’s own controller logic, if it flamed out without an “external command” to shut down, i.e. being switched off.
@Victor. You wrote, “There’s another interesting aspect of allowing pilot inputs. When the fuel starts running low, the crossfeed fuel valves can be opened, which means both engines will flameout at nearly the same time, and the fuel range will be maximized.”
The crossfeed valves being open, piloted or not, is interesting in another respect I have pondered about. The APU DC pump could deliver relight fuel to both engines.
@Victor
Interesting if not exciting.
Are you saying the tank equalization can only be done at low fuel level? So therefore, if true that could be active pilot?
I think you are saying 00:17 because that is 2-min before 00:19 Arc7. So you are saying APU came on long enough to reboot SATCOM but short enough to not logon IFE.
That implies if we say straight flight over Arc7 at constant speed, I get about 435 ground speed for 180 South path. This could be refined, but I wonder if that is a little slow? I wonder if that implies moving closer to 30 South is more consistent. Admittedly I am showing my bias but I am trying to say, what can we deduce? Of course once we say active then that leads to possible end-flight maneuvers.
@Victor
PS- on above calcs, I am just looking at Arc6 to Arc7 distance.
@TBill: I said open the crossfeed valves when the fuel level is low so that each engine would draw from its respective tank and therefore there would be little weight unbalance. The valves in fact could be opened at any time, but the draw from the left and right tanks might be very uneven.
I am suggesting the possibility that both engines flamed out at 00:17, the APU come online a minute later, and the SATCOM logged in a minute later during an accelerating steep descent. (Of course, it might have taken longer for the SATCOM to log-on, which means the engines flamed out earlier.) The dynamics of that descent might have uncovered the APU fuel line inlet and caused the APU to fail with a little fuel still in the tank, which cut the power to the SATCOM. It’s possible there was a recovery and glide after that.
Here’s an interesting possibility: Let’s suppose the pilot intended to perform a powered, flaps-down ditching. Unfortunately, he started his descent late, ran out of fuel while still at relatively high altitude, and he couldn’t lower the flaps, which require an altitude less than 20,000 ft. When the APU started, he eventually realized that this might provide the opportunity to lower the flaps, but he also knew that he had limited time before the APU ran dry. He descended quickly to get below 20,000 ft while the APU was still running, but the descent uncovered the APU fuel inlet, and the APU failed before the flaps were lowered.
@Victor
Another way to put that I think is that we may start to have water-impact consistent flaperon explanation. I found myself re-reading Langewiesche to see how he handled the flaperon issue, and I think he ducked (was silent). In general when he came a fork in the road, he took it, which has story value it seems.
@All
Concerning: More arguments against South Pole route.
Until today I have discussed two arguments against routes towards the South Pole:
(1) The BFO data is not sufficiently strong from a data statistical point of view to determine the best solution among southern routes.
(2) A route towards the South Pole is only likely if the reason was suicide. All known pilot suicides in large passenger jets were not particularly well hidden, and they happened within a few minutes. MH370 does not fit this picture. In a broader perspective (not limited to airplanes, but including other types of murder/suicide cases) there are a few cases of well hidden suicides. Also this type does not fit to MH370, in particular because of the rebooting of the SDU.
In other words I think we have to come up with another type of suicide if the South Pole route is to be our best proposal.
@Viking
May I ask if you have read the paper available above and followed the discussion with meanwhile 660 comments?
@All
Concerning: Biofouling on debris speaks against most southern routes.
If the airplane crashed somewhere near 34.4S in late summer, it would initially get mostly sub-tropical (mixed with some temperate) climate biofouling. As the currents predominantly move debris from this area towards northeast (later north), this movement combined with onset of autumn (later winter) will secure that temperatures remain almost constant for a long time. After 6-7 months with a modest fall they will start rising to values typical around Reunion.
I am sure this will allow some of the original subtropical biofouling to settle well and remain on the debris for a long time. Replacing this with purely tropical biofouling is not likely to have completed when the flaperon beached.
However, it was found with only one species of tropical biofouling. Finding only one species is unusual in its own, and in addition a detailed chemical analysis pointed to a rather unusual temperature history, starting at extreme tropical values (well above those near Reunion), then going down to sub-tropical, and finally approaching values near Reunion.
This is simply totally inconsistent with expectations!
@Richard
Unfortunately only DennisW seems to agree with the BFO data issue. Concerning the suicide issue there are somewhat mixed opinions.
However, I have not seen any arguments which can seriously sweep my two initial points off the table.
Please note that I am not saying the mathematics and logic method behind your analysis is wrong. On these points I agree with practically all your arguments, and I really think you did a good job. What I claim is that there are some questionable hidden assumptions behind. These need very careful consideration and discussion before we can draw any final conclusions.
@Richard
Sorry, I can see our contributions crossed. I hope it does not cause confusion that I started with the next issue.
@Viking
Was that a yes or a no?
@Viking: Some comments about your points:
1) The BFO is not being used in isolation to discriminate among paths to the SIO. In fact, Bobby thinks the path BEDAX-SouthPole might be the “best” path using criteria that does not include BFO statistics. Before rejecting the path on this basis, I suggest you wait until the analysis is presented.
2) Suicidal pilots have in the past have tried to misdirect investigators, including turning off the FDR and CVR to make it difficult to determine the cause. What’s never occurred before was a misdirection in the path as well as misdirection in the cause. That certainly is not a reason to dismiss the scenarios that include pilot suicide. We all acknowledge that events occurred in this incident that have never been seen before.
3) The marine biology results are at best inconclusive. If the plane crashed along the 7th arc near 34S, the debris traveled north and eventually to the west. Young, tropical marine organisms were found on the debris. That doesn’t seem very surprising to me. That said, I’m not a marine biologist. In fact, I wish a true marine biologist, i.e., somebody that does this for a living, would weigh-in to definitively accept or dismiss the possibility of a crash in southern latitudes.
@Richard
That was mostly a yes.
I skipped a few subsections where I could see that I would agree at least 99%, or where I knew I had no competence (sorry for that, but I wanted so save time), but I presume that is not a problem?
@Victor
I would also like to discuss the biofouling with an expert.
My knowledge on the subject is partly of general nature (other biosystems) and partly based on results from archeology. A nice example of the resilience of marine life with good adhesion is that certain clamps never managed to cross the Atlantic Ocean for millions of years, but they made it under viking ships 1000 years ago. This is one of many proofs that vikings made it to USA from Europe (and back) long before others.
In that case the temperature differences are actually greater (15 degrees or more).
@Viking
Dear Professor Martin Kristensen, many thanks for admitting you are short on time and competence.
I have also run out of time for someone, who quotes such experts as Kate Tee, Mike Chillit and Jeff Wise and cherry picks the satellite data with such a convoluted mathematical approach, camouflaging a parachuting from a Boeing 777.
RE:BFO
I have consistently used both BFO and BTO in path studies and a joint minimum error can be found for a plausible path(s). The BFO data including that at 00:11 is consistent with the hypothesis that there was a 6nmi north offset from 18:22+ to 18:40 and the value for the first phone call is either a turn to BEDAX or an incomplete turn to 186T (ISBIX?).
For the time period from 18:22 + a minute or so, until 00:11, the Satcom equipment appears to have been powered on continuously. Even if there is a fixed jump in average frequency at turn on, the stability of the crystal oscillator in the aircraft when at constant temperature is known to be excellent. So, at best, a simple change in the BFO fixed offset would suffice to correct all of the data. I believe that it is not quite so simple, but it may be good enough for the period of time in question, but do note use exactly 150Hz.
@Sid Bennett
A constant (changed) bias frequency for the interval 19:41 – 00:19 is what I employed in my recent paper, please see (and link therein):
https://mh370.radiantphysics.com/2019/05/31/a-new-methodology-to-determine-mh370s-path/#comment-23535
It gives some interesting results, which to me indeed seem to suggest that frequency stability was good.
The paper will be updated soon, with a “Case C”. All key results are indicative for a crash latitude in the S33 -S35 range, and consistent with constant true track, LRC near FL340 – 350.
@Sid Bennet, @Niels
Your approach looks interesting, and qualitatively comes much closer to the behavior one might expect from the oscillator after a rough cycling in temperature and pressure. It tends to get stuck at some offset, which gradually decays over a long, and not particularly well defined time (typically following something like a stretched exponential curve). My guess is that for the period in question it will work fine. As a side result it will also be able to include effects from an open door (but with a somewhat larger and different offset).
This is exactly what what I have been arguing on concerning the figures in the Ashton paper for a long time.
If one plots measurements performed at fixed time intervals on such a system over a very long period of time (in this case probably several days or even weeks) the data statistics will show a tail heavy distribution. One will get the same qualitative distribution (but with a smaller spread) without the cycling as DennisW correctly points out.
A real offset (such as flying permanently with an open door or an incorrect temperature on the stabilized furnace) will behave qualitatively different for long times (no decay), but for shorter times it will look very similar.
@Richard
Using this kind of knowledge in the analysis is not cherry picking of the data. However, with so few data points as we have available, one must be very careful. Probably I was not sufficiently careful on this point in my initial analysis, but in order to limit any damage I gave the BFO data very low weight.
@Niels
I am looking forward so your Case C (and perhaps later D).
Have you tried to look for solutions with a U-turn (eg. soon after 19.41)? It may not automatically be found with standard polynominal fitting, since it may be necessary to insert a sign change somewhere in the procedure.
@Richard
I had very good reasons to use Topology Optimization as my mathematical procedure. One reason is that I had written and documented the validity of the necessary software and procedures years ago. Another reason is that I knew my particular version is able to handle rough terrain (including things like a sign change).
This is exactly the opposite of hiding something. Rather it is able to find the nasty needle in the haystack!
737 Max saga followers. From the below, “Air Canada is the only North American carrier with a MAX full-flight simulator. This could influence the return-to-service timeline if regulators mandate additional simulator training as a condition of operating the MAX again. ”
I though the Max needed no special training? If so why would there be one and why just Canada?
‘thought’ vs ‘though’
https://aviationweek.com/commercial-aviation/grounded-service-737-max-fleet-where-are-they-now?NL=AW-05&Issue=AW-05_20190731_AW-05_71&sfvc4enews=42&cl=article_2&utm_rid=CPEN1000000945612&utm_campaign=20657&utm_medium=email&elq2=e9c361bebeb44269b0bae1f145ec5b33
@David,
It was intended that the 737 MAX would not require specific procedures training, it was to be regarded as sufficiently common with the NG series that there was no specific requirement for a FFS replicating a MAX flight deck. While the cockpit displays systems are considerably different, the information that is displayed was deemed to be common. As Boeing had underplayed the impact of MCAS, it was not deemed necessary to be part of the training curriculum: why would it? MCAS was not even described in the FCOM.
As airlines transitioned their fleets to MAX it would be normal for the airline’s simulator fleet to reflect the mix of variants. My experience was that a rule of thumb was 25-30 aircraft to 1 simulator for an aircraft such as the 737. A range of factors will drive the ratio.
It remains to be seen what conditions will permit the MAX to fly again, modification may be required to the simulators, just as the aircraft will undoubtedly require mods. It has been reported that Boeing made assurances that the MAX would not require specific training in FFS.
Air Canada, and other training providers who had made early acquisitions of MAX simulators, will be well placed to move quickly to meet whatever requirements are set out for return to service. Flight Global publishes an annual census of simulators, you may find it a handy reference.
@Don Thompson. Thanks. So as airlines 737 numbers increase, understandably they need more simulators and added Maxes are best served by adding Max simulators, albeit other 737 simulators will do if you need no more in gross.
Looking at a Flight Global summary I see that CAE of Canada has over half the world market so I suppose that would be a good reason why Air Canada apparently was first (in North America that is: I see that there are others).
The Chinese had one (‘Tru’ manufacture (US based)) qualified as Level D in October 2018 and Gatwick had two of Tru’s qualified to Level D last year also, the earlier in August.
I noticed on a quick web scan that there is interest in developing simulators for accident investigation!
Who knows how they could be adapted to suit different types/functions but maybe their role would be limited. Perhaps these would be available for all national aircraft accident investigative agencies to hire, since I daresay they would be expensive. Perhaps ICAO is involved somewhere.
They might be envisaged for when the aircraft manufacturer’s do not suit, or there is none for the aircraft type, or none suited to the research specifics in question.
@David
RE: “I noticed on a quick web scan that there is interest in developing simulators for accident investigation!”
The Use of Full Flight Simulators for Accident Investigation
@David
CAE has dominated the civil, and possibly military, simulator business for many years. I worked with CAE’s teams many times, I was always impressed by their capability. L3-Link remains a competitor having evolved out of the legacy of TTS/Rediffusion/Link-Miles, companies that once, collectively, had a much greater market share. I’ve seen TRU mentions popping up more frequently.
It’s my understanding that a flight test data pack, supplied by the a/c manufacturer, is now a significant part of the simulator cost. It’s not a volume business, long product delivery cycles, not so attractive to startups.
@Victor
I know your scenario (failed-flaps down landing) was a brainstorm, but why do a flaps down landing, and if so, why mess it up so bad? Why delay steep descent until SATCOM reboot, and then we also have the ELT signal expected. How about cabin pressurization rationale for descent, assuming possible need to move about the aircraft or MEC Bay?
In any case, I feel like fuel equalization potentially makes Arc6-to-Arc7 more constant speed and that makes Arc7 more important data point.
@TBill: I’ll answer your questions again recognizing that I am providing food for thought. I don’t necessarily prescribe to this scenario.
1) “Why do a flaps down landing?” Flaps-down reduces the stall speed, which means less damage when the aircraft contacts the water. However, with no thrust available, the increased drag also means the descent rate increases, so the descent rate has to be properly managed in the flare. Complicating this is the lack of a good visual reference, but the radio altimeter (RA) would help.
2) “Why mess it up so bad?” I think you are asking how the plane was allowed to run out of fuel before reaching an altitude where flaps could be deployed. I don’t know. Perhaps there were conflicting goals of maximizing range (i.e., stay at high altitude as long as possible) and ditching safely (i.e., deploy flaps at an altitude below 20,000 ft).
3) “Why delay steep descent until SATCOM reboot?” Perhaps the timing of the steep descent was related to the APU coming up, and the realization that a flaps-down configuration was possible if below 20,000 ft. The SATCOM reboot was a consequence of the APU start-up, and may or may not have been noticed.
4) “How about cabin pressurization rationale for descent”? When bleed air from the engines is lost, the outlet valves would automatically close, and the depressurization would slowly occur. Perhaps the rising cabin pressure altitude did prompt a rapid descent.
@Viking
(1) What I mean by cherry picking is:
(a) Discarding the satellite data at 18:25 UTC, quoting the Inmarsat Paper. Whereas the Inmarsat Paper states that corrected values my be derived.
(b) Excluding the satellite data at 19:41 UTC, because you claim MH370 was heading North West, just prior to performing a U-Turn at that time, and not heading South East.
(c) Ignoring the change in the satellite height, because it didn’t fit your model.
(d) Guessing at the AES compensation algorithm, but ignoring that the AES compensation algorithm is known.
2. What I mean by a convoluted mathematical approach is, initially assuming a flat earth, then updating to a spherical earth, then updating to an oblate sphere.
3. I have run your flight path to Christmas Island and beyond though my model. I have included the U-Turn at 19:45:20 UTC on an initial bearing toward your point at 20:41:05 UTC (roughly toward Perth YPPH). I have included the change in track at 20:41:05 UTC or “bend” of 6.3° on an initial bearing toward your point at 21:41:27 UTC (roughly toward Christmas Island YPXM) and change of speed to fit your point at 00:11:00 UTC. I assumed an altitude of 11 km, LNAV navigation mode and a variable Mach speed.
The BTORs are fine only when the latitude and longitude are forced to your points, which implies your LNAV navigation mode is out and/or there are speed changes in each leg. Your mean BTOR is -2.3 µs and the standard deviation is 4.6 µs, which is too good to be true. Without forcing the latitude and longitude at each handshake, the mean BTOR is -6.4 µs and the standard deviation is 137.8 µs.
The BFORs are way off, the standard deviation is 39.64 Hz.
The PDA is -0.16%, compared with a nominal -1.5%, which implies there was 218 kg fuel remaining at a MEFE at 00:17:30 UTC. The bleed air system would have to have been switched off for 74 minutes, to save this much fuel.
In addition, your end point does not fit the drift analysis, as shown previously.
https://www.dropbox.com/s/gm4sc2elblt74eq/MH370%20Flight%20Path%20Model%20V19.8%20RG%20LNAV%20VM%20FL367.6%20MK%20Full%20Report.png?dl=0
@Victor
Curious….What is the One-Engine Inoperative Cruise Speed (ETOPS) for a B777 and at what Flight Level will the crew fly the plane?
Thx in advance.
@Andrew. The cricket intervened.
Thank you for that interesting reference. His interest is principally in the FSS/pilot interface, warning as to their use in replicating pilot reactions. To me he has unrealistic expectations as to the FSS improvement potential when given the variety of aircraft configurations (hardware and software) and limitations of data outside the flight envelope. For example he notes that they do not replicate flutter, while implying that pilots should not encounter situations they have not been exposed to in an FSS. That seems incompatible with flight trial limitations.
What work is now envisaged to develop simulation specifically for accident investigation, as distinct from pilot training, remains unclear. Perhaps in engineering simulation the requirement for flight trial verification could be waived, Boeings assessment of 737 elevator flutter (for the Silk Air investigation) being just an example of such assessments that could be added into the data base, albeit with lowered proof of fidelity.
On a lighter note I wonder as to weaknesses in the fidelity of the simulation now used in cricket to confirm or deny whether the bowled ball would have hit the wicket (the batsman then being ‘out’) had it not struck the batsman’s pads first. Its fidelity and authority seem unquestioned.
But could the Poms nobble it?
@Don Thompson. “It’s my understanding that a flight test data pack, supplied by the a/c manufacturer, is now a significant part of the simulator cost.”
Then there are the updates. Outside my data base here but while @Andrew’s reference touches on formal ‘qualification’ requirements it must be difficult and expensive to see that hardware and software changes are incorporated, configuration then being monitored formally, so maintaining the FSS integrity even with adjustments in configuration to suit the aircraft model simulated.
All this with FSS having evolved from an assistant in training to an examination tool.
@Victor. Complementing your answer to TBill’s 3) “Why delay steep descent until SATCOM reboot?” Surprise at the roll induced by RAT deployment, that continuing to APU generator loading, may have contributed?
@Richard
You are bringing up many issues. I have answers for them all, but it would take up too much space to answer them all in one Blog contribution. Therefore I will answer them in smaller groups. Here comes the first bunch:
(a) In the optimization I ignored all points before 19:41. For anything before (and including) 18:25 (and the first subpoint at 18:28), I was simply worried that the uncertainty was too great since the oscillator was most likely still drifting significantly. It is correct that a major error contribution is coming from a simple digital effect which can be handled as described by Ashton. I did in fact use this information during the reconstruction of the flight between MEKAR and the position at 19:41. My quoting of Ashton is therefore referring to this general issue, and it is wrong that I discard the data. However, I would still insist that it should not be included in the optimization, since there is still some drift, and almost certainly still ongoing course changes.
(b) Concerning the point at 19:41, I was particularly cautious in the analysis. As you can see from my paper, I applied several different methods to analyze the situation. From this I concluded that the most probable solution is that there was a U-turn immediately after 19:41. However, I have never excluded the other ‘branch’ which results in a solution very close to the one found by Ashton (and not significantly different from the solution that I presume you prefer). In case of a U-turn one must exclude the 19:41 point from the optimization. However, it is still included in the reconstruction of the rest of the flight after MEKAR.
(c) It is clear from the numbers in table 9 that the Ashton paper ignored the satellite height contribution to the Doppler shift. I was in fact very reluctant to do the same (as you can read in my paper), but its inclusion made both ‘branches’ fit significantly worse. This gave me the impression that it was somehow included in the INMARSAT numbers already. This issue (together with others we (partly) discussed before) was my reason to put very low weight on the BFO data.
@Victor
Dual flameout worst case- maybe 80nm glide, not necessarily straight away from Arc7, so maybe +60 nm outisde Arc7 search zone. Inside Arc7 not impossible. Not good, but better than my worst case scenario 300-nm glide with some fuel left.
@David
In my view, Tydeman’s paper argues that investigators need to carefully consider the limitations of simulators before drawing any conclusions from an accident simulation. That seems reasonable to me.
Unfortunately, I didn’t get to see the cricket.
@TBill. An observation. For a glide it could be that his altitude at LOR, 00:19:29 was much lower than cruise altitude, the result of his dropping the nose earlier; at, or possibly before, MEFE. His descent rate at LOR on a southerly course could have been up 13,600 fpm while remaining consistent still with that BFO.
He might have been able to recover some increased kinetic energy, maybe not (e.g. spoilers deployed, APU inlet drag while running).
I realise that you are looking at the likely maximum range but achieving that depends on assumptions as to his aim.
@Andrew. “In my view, Tydeman’s paper argues that investigators need to carefully consider the limitations of simulators before drawing any conclusions from an accident simulation. That seems reasonable to me.”
I agree.
@Viking
My apologies, the statement on PDA should read, a nominal +1.5%, not a nominal -1.5%. I got the sign wrong:
“The PDA is -0.16%, compared with a nominal +1.5%, which implies there was 304 kg too little fuel to reach a MEFE at 00:17:30 UTC. The Right Engine flamed out at 00:07:42 UTC and the Left Engine flamed out at 00:12:43 UTC”.
@David
Re:
I did a quick simulation starting at FL250 and cutting power at 00:17 and let the aircraft slow down until 00:19 and then a dive to approx. FL170 and then glide. I could have dived to lower altitude but I assumed the pilot was either (1) trying to lower flaps, or trying to pressurize aircraft to comfortable range possible with O2 bottle so as (2) to maintain some altitude for glide.
Nornally we say could glide over 100-nm if you were at FL350. Of course possibly max glide was not the goal, could have gone in water earlier at higher speed. Perhaps probablilites could be developed.
@David
PS- I set tailwind of 30 knots from the west and tried to glide with the wind perpendicular away from Arc7 using an old 180 South CTH case.
Forgive my laziness in searching the blog:
What is the issue regarding the effect of satellite height on the Doppler shift?
@ Sid
No need to search the blog! My comment was only yesterday.
I did not say “satellite height”. I stated “change in satellite height”.
I did not say “Doppler shift”. I stated “Ignoring the change in the satellite height, because it didn’t fit @Viking’s model.” Both BTO and BFO.
BTO is dependent on distance (which can change if the satellite height changes).
BFO is dependent on velocity aka change in distance (which can change if the rate of change of satellite height changes).
@Viking said: It is clear from the numbers in table 9 that the Ashton paper ignored the satellite height contribution to the Doppler shift.
I’m not sure what you mean. Inmarsat does not ignore any component of the satellite’s velocity vector when computing the C-band and L-band Doppler shifts. They do ignore the vertical component of the aircraft’s velocity vector, i.e., the rate of climb (or descent). We know the BFO is very sensitive to vertical velocity because it is completely uncompensated by the AES. For level flight, that simplification is justified. During the initial climb and during the final descent, it is not.
Earlier this week I undertook to collect some information on BFO offset and while I have not found all of it, the following link should be useful.
https://www.dropbox.com/preview/Public/BFO%20documents.pdf?role=personal
@Sid Bennett,
Viewing your Dropbox requires me to sign in to Dropbox and also gives Google access to all my contacts (which I won’t do). I suggest you provide your file in a different manner.
@DrB
+1
I understand. Can you suggest another service I can use?
@Sid Bennett: Dropbox is fine. If you are using a Windows operating system, right click on the filename in your Dropbox folder, and select “Copy Dropbox link”. Then paste that link here.
@Sid Bennett
RE: “If you are using a Windows operating system, right click on the filename in your Dropbox folder, and select “Copy Dropbox link”. Then paste that link here.”
The process is the same in OS X.
@George Tilton
RE: “Curious….What is the One-Engine Inoperative Cruise Speed (ETOPS) for a B777 and at what Flight Level will the crew fly the plane?
That decision depends on a number of factors, including weight, temperature, terrain and distance to the nearest suitable airport. If range is an issue, the crew would normally fly at the Engine Inoperative Long Range Cruise speed (EO LRC), typically about M0.65 and around FL210-FL240 at medium weights. The crew might fly faster (and lower) if range is not an issue.
@Victor
When I recalculated the numbers in table 9 long time ago, I found that INMARSAT had also ignored the vertical component of the satellite velocity.
@Richard
I suspected that sign error, but I am extremely glad you found it yourself. It is interesting that the flameout of the right engine calculated by your model fits exactly with the contrail. By reading off from the weather satellite photo one I got 00:08, just 18 seconds later.
@Sid
The issue on the satellite height is that INMARSAT ignored the first term in my formula (5) (DeltaH/Deltat) in their table 9.
Well, I can use the link that I posted and get the document.
If anyone wants it sent another way, please suggest it.
@Viking
What is the magnitude of the error?
@Viking
You are missing the point. The PDA for your path does not fit a MEFE at 00:17:30 UTC and your BFO calculations are completely wrong.
@Paul Smithson
Some time ago you proposed a flight path starting at 18:32:30 UTC with a start latitude of 7.113°N and start longitude pf 95.2520°E at FL 340 (35,439 feet) in LNAV mode on an initial bearing of 190.55°T and at a speed of CM 0.8455.
My apologies, that it has taken me so long to get around to running your flight path through my model, you probably thought justifiably, that I had forgotten you.
Here are the results:
https://www.dropbox.com/s/w016njiendcb87o/MH370%20Flight%20Path%20Model%20V19.8%20RG%20LNAV%20CM%200.8455%20FL340%20190.55%20Paul%20Smithson%2003082019.png?dl=0
You calculate the flight path crossed the 7th Arc at 39.72°S. I calculate 39.51°S, which is not far off your result. There are quite strong headwinds toward the end of flight, which might explain the difference in our calculations.
The BTOR standard deviation is 34.2 µs, which is good (nominal 29.7 µs). The BTOR at 22:41:22 UTC is -85.1 µs, which is high.
The BFOR standard deviation is 5.98 Hz, which is a bit high (nominal 2 to 5 Hz). The BFOR at 00:11:00 UTC is 6.36 Hz, which is high.
The PDA required for a MEFE at 00:17:30 UTC is +2.52% (nominal +1.5%), which means the fuel consumption does not quite fit. There is around 159 kg too little fuel, and the REFE would occur at around 00:07:55 UTC and the LEFE would occur at around 00:15:20 UTC.
The RMS GSE is 3.19 knots and peak GSE is 3.265 knots, which is a high (nominal is < 1.5 knots).
@Viking said: When I recalculated the numbers in table 9 long time ago, I found that INMARSAT had also ignored the vertical component of the satellite velocity.
That’s wrong, as Richard and I have been telling you. All components of the satellite’s velocity vector are included in the calculation.
@Sid Bennet said: Well, I can use the link that I posted and get the document. If anyone wants it sent another way, please suggest it.
I already did. Please read my previous comment.
In addition to Windows, @Andrew said this procedure works on OS X.
@Viking said: When I recalculated the numbers in table 9 long time ago, I found that INMARSAT had also ignored the vertical component of the satellite velocity.
I will ‘upvote’ both Richard and Victor’s comments. Inmarsat describes using ECEF geocentric coordinates in their work. The Perth GES antenna, the satellite ephemeris, and the aircraft positions were all dealt with as ECEF coordinates. To do so is both accurate and pragmatic, although ECEF coordinate space appears to remain a mystery to many casual observers.
In your paper, you have chosen to demonstrate that a solution can be worked in the geodetic coordinate system despite the complexities of accounting for ellipsiodal models, oblateness, and local geoid variations.
The ephemeris for I3-F1 was calculated in 3 dimensions, stepped over time, by a number of analysts who have contributed here, not only Duncan Steel.
@Andrew
Thank you!
This one will be right up your alley…
Does the FMC automatically initiate step climbs as the weight burns off or must the crew manually initiate them?
@George Tilton
RE: “Does the FMC automatically initiate step climbs as the weight burns off or must the crew manually initiate them?”
The FMC will ‘recommend’ a cruise flight level based on the cruise speed schedule, the size of the ‘step’ to the next higher cruise altitude (eg 1,000 ft, 2,000 ft, 4,000 ft), weight, wind and temperature. The FMC will calculate the optimum step point for a climb to the next higher level, and the crew can also enter planned step points at specific waypoints. However, the aircraft will not climb unless it is manually initiated.
https://www.dropbox.com/s/1d7ioamhqbzogi1/BFO%20documents.pdf?dl=0
Oh! There were a few more steps. I haven’t done this in a few years…
Thanks for your patience.
Sid
I did some simulations and calculations using the PMDG 777 model to see how the tilt angle of the free surface of the fuel in a fuel tank might change as the aircraft enters into an increasing steep descent with a nose-down pilot input to the column. The results are highly dependent on initial conditions and the amount of force on the column. Nonetheless, I think the results are illustrative. I used standard atmospheric conditions with no wind.
Time 0: Alt=39,230 ft, GS=441 kn, TAS=442 kn, VS=-2650 fpm, Pitch=-1°
Time 12.5s: Alt=36,920 ft, GS=419 kn, TAS= 473 kn, VS=-22,250 fpm, Pitch=-30.5°
(The plane loses about 1046 ft of total energy over this interval.)
Assuming a constant acceleration over this time interval, I calculate:
a_vert=-0.81g, a_hor=-0.092g
where the positive horizontal and vertical directions are defined by the direction of travel over ground and up relative to ground, respectively.
Treating the acceleration as a fictitious body force in the accelerating frame (the aircraft), the effective g-field is:
g_vert=-0.19g, g_horiz=0.092g, g_tot=0.21g, g_dir=-63.9° (63.9° below the horizon and in the direction of travel)
which means that an object moving with the plane would feel 81% lighter and be pushed forward (parallel to the ground).
The tilt up of the free surface relative to the body of the plane would be: (g_dir-Pitch+90), or 27.1° at 0s, increasing to 56.6° at 12.5s.
The bottom line is that for a fuel inlet at the rear of the tank, the inlet would likely be uncovered at low fuel levels.
A ball placed on the floor of the plane would roll forward.
@Andrew said: However, the aircraft will not climb unless it is manually initiated.
I can think of several ways that automated climbs can be obtained. Your thoughts are appreciated:
1) With autothrottle engaged and the autopilot engaged, set a very high altitude that is unobtainable (like 45,000 ft), and as fuel burns off, the altitude will slowly increase. The thrust will remain at maximum
2) Same as (1), but with the autothrottle disengaged, and the thrust set to a lower value, like 90%.
3) With autopilot engaged in VNAV, and the MCP altitude set to a high altitude, set altitude constraints associated with waypoints along the route to replicate the manual step climbs.
@Victor
Would a pilot realize that action could uncover the APU fuel inlet? It was a surprise to me…I was thinking down pitch would force more fuel supply.
I would say in PSS777 the dual flameout intentional descent scenario seems reasonable explanation from FL250.
@Victor
RE: ”1) With autothrottle engaged and the autopilot engaged, set a very high altitude that is unobtainable (like 45,000 ft), and as fuel burns off, the altitude will slowly increase. The thrust will remain at maximum
2) Same as (1), but with the autothrottle disengaged, and the thrust set to a lower value, like 90%.”
I assume you have VNAV SPD or FLCH SPD engaged? If so, the aircraft will continue climbing very slowly as the aircraft weight decreases.
RE: ”3) With autopilot engaged in VNAV, and the MCP altitude set to a high altitude, set altitude constraints associated with waypoints along the route to replicate the manual step climbs.”
As far as I’m aware, that would only work while the FMC is in the climb phase.
https://www.dropbox.com/s/gj6eucf96wdmk2m/B777.NAV.FMS%202%20-%20Altitude%20Step%20Points.pdf?dl=0
@Andrew: Yes, For (1) and (2), VNAV SPD or FLCH SPD is engaged.
And yes, for (3), I am assuming that the FMC is in the climb phase.
By the way, in the PMDG 777, while in VNAV, I often encounter problems transitioning to a climb phase by entering a new cruise altitude after a descent phase. I’m not sure whether that is a fault of the PMDG 777 model, or I am doing something wrong, or the real FMC has restrictions about multiple climb phases in a flight.
@all
Through the following link a revision to my last paper can be accessed. The most important changes are related to the incorporation of “Case C”, with changes to the results and discussion sections accordingly. The main conclusions / recommendations remain the same.
https://www.dropbox.com/s/mzclfjn5knhqb7b/WGS84_LRC_TT_report_v1_5.pdf?dl=0
The most relevant cases in terms of results are B and C. If we take their 00:19 latitudes as limits, a region from S33.7 to S34.8 is defined (near the 7th arc). So 33.3 – 35.2 should imo be the mimimum range to be in focus. It is clear that a wider latitude range is allowed by the data, even under the same main assumptions (CTT/LRC/level flight in the final hours of the flight). I’m very curious for the outcome of the towed sonar data “meta-study” that Don Thompson is carrying out, as well as for the follow-up paper on Richard’s last publication.
For a possible future search, I currently tend to advise to re-scan all or most of the “Phoenix” area (the area that OI went “around” / the “yellow” area in fig. 73 of the 3 Oct. 2017 ATSB report), before extending wider based on a “pull-up and glide” assumption. My opinion may change depending on the results presented from both studies mentioned, as well as the ongoing discussions on end-of-flight scenarios.
@Victor
RE: ”By the way, in the PMDG 777, while in VNAV, I often encounter problems transitioning to a climb phase by entering a new cruise altitude after a descent phase. I’m not sure whether that is a fault of the PMDG 777 model, or I am doing something wrong, or the real FMC has restrictions about multiple climb phases in a flight.”
IIRC, you can force the FMC back into the cruise phase by entering a new cruise altitude, but there can only be one climb phase per flight unless the aircraft executes a go-around. In that case the FMC transitions back to the climb phase when TOGA mode is engaged or, in the case of a manually executed go-around, when the MCP is set to a higher altitude, the rate of climb is 600 ft/min or greater and the flaps are retracted from a landing position.
@TBill
I find it difficult to embrace the notion of rescanning areas that have already been scanned. The expectation that the “comprehensive survey” of flight paths will yield anything useful is fading pretty fast.
Have we seen this movie before? Did it have a happy ending?
@DennisW;
The expectation that the “comprehensive survey” of flight paths will yield anything useful is fading pretty fast.
Just think of the exercise as if you’re digging up potatoes; the more you ‘turn-over’ the ground, the more you’ll get!
@DennisW
We have now simulated well over 1,300 possible flight paths. I call that a comprehensive survey.
… and yes … we are still carrying on looking for “potatoes” … as @Barry Carlson describes our work.
A LNAV180 LRC FL390 flight path is still the only flight path simulated to date, that has a standard deviation BTOR < 40 µs and a standard deviation BFOR < 5 Hz and a RMS GSE < 1.5 knots and a PDA of 1.5% that fits a MEFE at 00:17:30 UTC (albeit with the air bleed system switched off for 38 minutes after diversion).
I think the only thing fading fast is the basis for your continued unfounded criticism and impatience.
@Victor. About your downwards acceleration simulation, the below might be of some interest. I posted it 2 years ago to persuade another blogger, hoping that the signature would help. https://www.dropbox.com/s/80snphi23vc54wq/Forward%20forces%20from%20aircraft%20internals%20in%20aircraft%20acceleration.pdf?dl=0
Another thought on the consequences of residual fuel flowing forward is that at the right descent angle it might cover the left main tank draw-down outlet and fuel a relight through that, though by that time the left engine might well have shut down anyway
@TBill. I hypothesised that the pilot might have poled forward before left engine fuel exhaustion. If fuel forward movement in the tank did not cover the left main tank draw-down outlet, and do that before boost pump inlets were exposed, the left would have flamed out. Besides, were the APU DC fuel pump inlet also exposed a relight (more likely at the higher atmospheric pressure) would have been prejudiced by vapour lock still. The higher atmospheric temperature would tend to reduce that risk though, depending on the aircraft acceleration, the nose down attitude could offset that.
In summary, unless the pushing the nose down I speculated about occurred when there was enough fuel to keep either boost or APU DC fuel pump inlets covered once the nose was down, there would have been no log-on.
line 5, ‘pressure’ for ‘temperature’ please
@David: That analysis (implicitly) assumes the lift and angle of attack are zero, i.e., the flight path angle equals the pitch angle. Those effects are included in the calculations I provided.
I think we have persuaded ourselves that the left engine did not re-start, as it would have occurred before the APU, and starved the APU of fuel.
@Niels
Many thanks for your paper. It makes interesting reading, especially Case C.
You note that your proposed Case C flight path passes close to waypoint BEBIM and that @ventus45 noted the subsequent track heads towards waypoint EKUTA. I also note that the earlier track passes directly over waypoint ISBIX and fits a track coming from waypoint AGEGA. In general a track via VAMPI – MEKAR – NILAM – AGEGA – ISBIX – BEBIM – EKUTA fits the satellite and fuel data quite well.
I have run a LNAV path using these waypoints from your start point at 2.3600°N 93.7503°E at 19:41:03 UTC in LRC speed mode at FL335.3. My end point near the 7th Arc is 33.66°S 94.70°E (you calculate 33.67°S).
The results are in the link below:
https://www.dropbox.com/s/dubdj9ekaq7uy9f/MH370%20Flight%20Path%20Model%20V19.8%20RG%20LNAV%20LRC%20FL335.3%20Waypoints%20Niels%20Case%20C%20Full%20Report.png?dl=0
The standard deviation BTOR is 49.5 µs (nominal < 40 µs), the standard deviation BFOR is 2.8 Hz (nominal < 5 Hz), the PDA is 1.6% (nominal 1.5%) and the RMS GSE is 2.9 knots (nominal < 1.5 knots).
An interesting result.
@Richard
The basis for my impatience is your continued use of BFOR as a path qualifier.
@DennisW
At the moment I feel like Victor’s new proposal for double-flame out is possible game changer. One implication is MH370 may have gone beyond Arc7 so yes that suggests rescan is less important than wider search. I am re-open on where MH370 crossed Arc7, believing the dual flame out assumption might lead to a new calculation of end point location(s). Working to understand that.
@DennisW
You stated “The basis for my impatience is your continued use of BFOR as a path qualifier.“
You had better get used to it.
I am not throwing the BFORs out the window.
@Niels
@Richard
NILAM EMRAN ISBIX +186 FMT18:40 M=0.832 is another excellent fit in Barry’s model.
The turn to EMRAN could be consistent with the BFO behavior at c18:22 and the first telephone call. This path results in a bearing of 186 between EMRAN and ISBIX.
I am still trying to find a understandable discriminator between the various options after ISBIX.
1)ISBIX + 186 is the simplest
2) ISBIX +181 or so seems reasonable but requires more pilot input and therefore assumes more “arbitrary” parameters.
Once one pins the FMT time at c18:40, adjustment of M brings at least several hypothetical paths into a very low error regime. At the moment, I do not think that the BFO can separate relatively similar paths after the FMT in the current situation.
I am going to revisit the study of the azimuth distribution after the FMT that I circulated several years ago.
@Richard
Thank you for your feedback, and for further exploring a possible route by waypoints related to case C.
What I notice in your sheet is the rather high 19:41 BFO error, and the rather high BTO errors from 20:41 onwards. I see two possible ways to especially reduce the BTO errors (mean and RMS):
a) If you prefer to keep constant FL and LRC setting for the whole 19:41 – 00:19 interval it is perhaps possible to shift the 19:41 latitude slightly northwards along the track.
b) The errors could also be indicative for lower speed than LRC/FL335 in the 19:41 – 20:41 interval; so perhaps a lower average FL in this interval? This is in fact what my fig. 5 (right panel) is suggesting, however that is partially forced through satisfying the 19:41 BFO as my procedure is programmed for.
I’m especially curious if a) would work; could you perhaps give that a try?
@Victor
@TBill stated “At the moment I feel like Victor’s new proposal for double-flame out is possible game changer.”
Are you now proposing a double flameout?
You stated earlier “There’s another interesting aspect of allowing pilot inputs. When the fuel starts running low, the crossfeed fuel valves can be opened, which means both engines will flameout at nearly the same time, and the fuel range will be maximized. That means the double flameout would have occurred around 00:17.”
Are you now agreeing there was an active pilot until the end?
When I previously proposed the idea, you response was:
“@Richard said: Can we assume an active pilot at the end of flight?
I think it is a possibility. I’m not sure it is our base case. Let’s continue to discuss and think about it.”
@Sid Bennett
You stated “NILAM EMRAN ISBIX +186 FMT18:40 M=0.832 is another excellent fit in Barry’s model.”
Barry’s model only includes the weather data to the nearest integer latitude and longitude, does not interpolate for time between 18:00, 21:00, 00:00 and 03:00 UTC and does not interpolate for pressure altitude between 350, 300, 250, 200 and 150 hPa. My model performs a quadrilinear interpolation every minute precisely in 4D.
Barry’s model only includes LRC mode for the Rolls Royce Trent 892 engines. My model includes CM, LRC, MRC and ECON speed modes.
I do not believe that Barry’s model is accurate enough for our purpose.
@Richard: I have not concluded that there was pilot input, or a controlled glide. I think these are possibilities that we should discuss and think about. My “base” recommendation is still to search within a radius of 30 NM from our best estimate of the last transmission (area A1) and then extend to the south if that search fails (area A2). Since A1 << A2, that still seems the best way to proceed. My concern was if we concluded that there was no dive-recovery-dive scenario (as some here suggested), the search would end after completing A1.
@Richard
As I have stated before, the version of Barry’s spread sheet that I use is constant M. I also use a constant altitude. I am not depending on the fuel consumption details.
I have asked you to try one of my cases to see what the practical difference is. IGOGU at 18:40, GCP at 186T, M=0.82 FL=350.
@Victor. Your 6:56AM. My analysis approximate? True. Indicative of the principle? I thought so. Proved persuasive? Well, no.
On left engine fuel draw down on pitching. As you imply, a restart including the relight I alluded to, that including an acceleration towards climb thrust, would deny the APU enough fuel for it to power the SDU reboot.
Including the effects of pilot pitch downs earlier than otherwise, manual APU selections and the alternate electrical configuration (though that is not now favoured) might disclose feasibles. I will let you know should by chance I make any headway with that.
@Sid Bennett
I have run a LNAV path using from your start point at waypoint IGOGU 7.516940°N 94.416667°E at 18:40:00 UTC in CM 0.82 speed mode at FL350 (36,503 feet). My end point at 00:19:37 UTC near the 7th Arc is 37.19°S 89.09°E (Barry calculates a model position at 00:19:30 UTC of 37.33°S 89.10°E).
The results are in the link below:
https://www.dropbox.com/s/5blk2oy4eoz4ulw/MH370%20Flight%20Path%20Model%20V19.8%20RG%20LNAV%20CM%200.82%20FL350%20186%20Sid%20Bennett%20Full%20Report.png?dl=0
The standard deviation BTOR is 67.3 µs (nominal < 40 µs), the standard deviation BFOR is 4.2 Hz (nominal < 5 Hz), the PDA is 2.3% (nominal 1.5%) and the RMS GSE is 3.2 knots (nominal 1.5 knots, which are too high.
@Richard
I like that you show BTO/BFO at the Arcs for the above path.
Here is how I would currently look at that above data. I don’t know if maneuvers are in progress on at Arc2 and Arc6, so I do not weigh BFO too heavily. BFO match Arc3 to Arc5 is perfect. I am guilty of assigning priority to BFO over BTO, assuming BTO delta has possible explanation due to wind uncertainty etc. But if you say Arc5 BTO delta cannot be fixed, then the other way to get perfect BFO match above is active pilot on that route or alternate route with dogleg turn towards southeast.
@Richard
Thanks for the prompt reply. I will study it. I am currently handicapped by being on vacation and having a single screen and no printer as well as such distractions as bridge, numerous cultural events etc. etc.
Richard,
Occassionally I will compare my route generator against yours just to see how well they compare. (Our BTO and BFO calculations are extremely close, so I stopped checking those.) For your most recent route, IGOGU @ 18:40, 0.82m, initial track 186, FL350, LNAV, you reach the 6th arc (24:11:00) at location -36.229, 89.251 whereas I reach it at -36.597, 89.226. There is a discrepancy of nearly 0.4 degrees in latitude. How significant is that?
1. If I compute the ground track at your 6th arc position, starting from IGOGU, using the Vincenty inverse formula, I get a value of 187.24 deg, where you have a value of 186.88, a difference of about 0.4 degrees. My ground track at my 6th arc position is 187.403, 0.002 smaller than the true Vincenty value. Note that I do not enforce compliance with the Vincenty formula during the numerical integration.
My BTO rms is 32 microsec, BFO rms 4.4 hz.
2. If I modify certain parameters to get a route close to yours, all I have to do is increase the FL from 350 to 360 and change the initial heading from 186 to 186.02, I get a route that is very close to yours – deviation of 0.02 degree in 6th arc latitude, BTO rms of 77 microsec (stdev of 57 microsec), BFO rms of 4.2 hz.
What does it mean? Simply computing a route with all input parameters set to predefined values and then determining a figure of merit at the end is not really meaningful. Small changes in the input parameters, and particularly those that are set to arbitrary values, can have a significant impact on the figure of merit. Small errors in the route propagator (whether yours or mine) can be compensated by small changes to those same input parameters.
Not sure if you would agree with the above assessment, but I’d be happy to answer questions.
@sk999
What does it mean? Simply computing a route with all input parameters set to predefined values and then determining a figure of merit at the end is not really meaningful. Small changes in the input parameters, and particularly those that are set to arbitrary values, can have a significant impact on the figure of merit. Small errors in the route propagator (whether yours or mine) can be compensated by small changes to those same input parameters.
I agree. It is an excerise in futility. I have several well founded objections to the basic approach (as you know). Have we seen this movie before?? I look forward to the long awaited final report. I will not go easy on it.
@Richard
When I plotted your path of 05Aug2019 (August 5, 2019 at 6:29 am above) in Google Earth, I notice, that it pretty much hits Cocos Island approach waypoint CC02 (300nm north west of Cocos Island at -9.378333° 92.623333°) almost on the button, a few minutes after 20:41:05.
https://www.dropbox.com/s/t9xiy9vmfzba7eh/CC02%20waypoint%20on%20Richard%20Godfrey%20Parth%2005Aug2019%20%282%29.jpg?dl=0
@Victor. Returning to William Langewiesche’s article in The Atlantic, what I highlight from that are the accounts of his first hand interviews with friends of Zaharie Shah and others knowledgeable of him. Those portray him as troubled emotionally, adding more weight to the view that the Malaysian police assessment is unsound.
Langewiesche coupled these with Zaharie’s home flight-simulations and with his final in-flight messages, which uncharacteristically included extraneous information yet excluded other, in suggesting that Zaharie was the likely culprit in a murder-suicide.
Oddly though, he makes no mention of various accounts that Zaharie was politically active, being concerned in particular about Malaysian Government corruption. Moreover while his theme is critical of the Malaysian investigations and information concealment, he does not address whether or not that political aspect was investigated by the Malaysian police; and if not why not.
Assuming this to be an oversight I now conflate Zaharie’s mental condition as above with possible motivation from this apparent concern about political corruption, offering for discussion some speculation (not entirely loose) on what might have been in his mind in sum.
The Malaysian Opposition had been stymied and he was a ‘fixer’. To this end he might have expected that disappearance at his hands of such a large aircraft and people aboard would have a major consequence for the Malaysian Government: not being able to explain that would make it appear incompetent at home and abroad. His hope therefore might have been that this could be made into a catalyst in bringing it down.
Reconstructing what may have been his plan, it was to confuse air traffic controllers as to where the aircraft was, once well abroad, and then to approach Malaysia as an unidentified aircraft – knowing he would be tracked by military radar – demonstrating that as such an aircraft could fly to the major air force base at Penang with impunity, finally disappearing out of radar range, apparently heading north west.
What he would picture is that he would be tracked not just by military radar but that ATC could trace him via primary radar records; and that other nearby countries might trace him also. Thus there would be a reasonable prospect that the incident could not be concealed; for long anyway.
In his mind, adding to this public embarrassment there would be the opprobrium of not having alerted other countries to this rogue aircraft at the time.
In particular he would be foreseeing that those to the north west surely would have expected timely warning of a potential terrorist attack heading their way.
Also, he would expect other governments whose nationals were aboard the aircraft would join families of those missing and the media at home (perhaps) and abroad in expecting an explanation for the disappearance together with action to find the passengers.
The intention of his southern Indian Ocean destination was to minimise the prospect of flotsam giving away that there had been a crash or at worst the crash location, thereby sustaining the embarrassment while minimising the risk that his responsibility would be uncovered, to the detriment of family and friends and to his plan’s success.
He might have expected that any wreckage that floated for some time would circle the earth down south and in any case any that drifted ashore with time would pass unnoticed or at the least would give little clue as to where the main wreckage was located, and what had happened.
He would stay and watch the final leg to its end in case some addressable problem was encountered on the way and to ensure by a final dive that there was no ELT signal at impact and that the aircraft flotsam was pulverised, (though the latter was not realised).
In the above scenario he would not have known that his turn and leg south could be deduced later by a novel and highly skilled analysis of some characteristics of routine SATCOM confirmations that the aircraft was operating still, and of unanswered enquiries to it. Quite possibly he would not even have known that the operator of that particular satellite had started recording these characteristics.
While I do not maintain the above presents a strong case I prefer it to its current alternatives.
@sk999
You stated “Simply computing a route with all input parameters set to predefined values and then determining a figure of merit at the end is not really meaningful.” @DennisW added “futile”.
In the paper linked in this post Bobby, Victor and I ran 828 flight paths without any prior constraints. None of the input parameters were set to predefined values. All 7 input parameters below were allowed to vary without constraints.
1. Start Time.
2. Start Latitude.
3. Start Longitude.
4. Flight Level.
5. Lateral Navigation Mode.
6. Initial Bearing.
7. Speed Control Mode.
The outcome of the comprehensive survey of possible MH370 flight paths shows only one flight path has a unique fit to the data we have, a LNAV180 LRC FL390, which passes close to waypoint BEDAX.
In the current and previous posts, 7 contributors each with their own flight path model have asked me to run 16 different flight paths to compare with their own results. Similarly Bobby, Victor and I have run a comprehensive test program comparing our independent models. I have found both sets of comparison very helpful and have helped correct a number of errors in both my model and the models from others. This is not meaningless or futile.
A key argument of many contributors has been that we have only considered flight paths requiring a passive pilot. Many of the flight paths proposed by contributors require an active pilot. You can find a table containing a list of all 16 flight paths proposed by various contributors in the link below:
https://www.dropbox.com/s/yv9a8ma3cpubfrv/Contributors%20Flight%20Path%20Proposals.png?dl=0
You will see from the results that none of the flight paths proposed by various contributors result in a standard deviation BTOR < 40 µs and a standard deviation BFOR < 5 Hz and a PDA < 1.5% and a RMS GSE < 1.5 knots.
The only flight path that comes close is the @Niels Case C.
For the benefit of @DennisW, you will also see from the results that none of the flight paths proposed have a standard deviation BTOR < 40 µs and a PDA < 1.5% and a RMS GSE < 1.5 knots, even ignoring the BFOR results.
I do not consider that either the comprehensive survey or the subsequent requests from @TBill, @Niels, @Hank, @Nederland, @Viking, @Paul Smithson and @Sid Bennett are meaningless or futile.
In fact I find your and @DennisW's attitude speaking out against such experimentation and model comparison as meaningless and futile.
@DennisW
You stated “I look forward to the long awaited final report. I will not go easy on it.”
The first positive thing you have said in weeks.
Dennis W
sk999
I, too, look forward to the long awaited report forthcoming from:
Dr B;
Richard; and
Victor.
But, Dennis W, I do not necessarily see it as “an excercise in futility”.
More to the point, it makes one stated assumption so that some groundwork can be utilised. That is simply that at “Arc #2” the aircraft was already on a single path in the general southwards direction, and that it flew through “arcs” 2 through 6, -possibly-even-7- unninterrupted.
If so, Then by progressively, i.e. incrementally, proceeding through a range of potential conditions a (very large) set of paths could be inspected for the possibility and/or probability that that was the actual path of the aircraft.
And, sk999, those small changes in input parameters (i.e.initial conditions) are just why the progressive and incremental stepping through the (repeat, very large) set of paths is required.
And, of course, Dennis W, no-one expects you to “go easy on it”. More the better.
__________________________________________________
There are other questions remaining. See post to follow.
All,
Following on from the above:
1. If we do not consider only that after some initial short time into the flight generally southwards the aircraft was sent on a single path, then the potential for finding the likely final resting point is diminished. If the aircraft even took one change in direction after what has been termed the “FMT” then all bets are lost. The number of possible, and potential, and variable, and conspirational, flightpaths increases “exponentially” in the figurative, not literal, sense. Even, with only one turn sometime after the “FMT”, the potential for determining the final resting place is dramatically reduced.
2. So, re-inforcing 1. above, the only likely and “worthwhile” search criteria is to define a “point” where the aircraft remains may lay presuming that the aircraft was flown, or flew, on a single path. This may well be worth a look-see. (i.e. Search)
3. A serious question remains as to how the aircraft descended to it’s final demise into the ocean. The “worst” case would be to assume that the aircraft somehow was able to glide in a straight direction (repeat “straight” direction) after loss of engine thrust. Other considerations exist, as have been explored on this blog of Victor’s. So this remains a serious point of discussion and resolution of probability.
@Ventus45
You stated “When I plotted your path of 05Aug2019 (August 5, 2019 at 6:29 am above) in Google Earth, I notice, that it pretty much hits Cocos Island approach waypoint CC02 (300nm north west of Cocos Island at -9.378333° 92.623333°) almost on the button, a few minutes after 20:41:05.”
An interesting observation! Many thanks!
I calculate that the flight path proposed by @Sid Bennett passes 2.147 km to the East of Waypoint CC02 at 20:46:23 UTC.
I have often thought that Cocos Island (YPCC) might have been an initial target. As you say, for an approach to Cocos Island from the North West, CC02 at a range of 300 NM would have been the first waypoint to set, followed by CC01 at a range of 150 NM and finally PCCNE and PCCNI to line up with Runway 15 to arrive at around 21:23 UTC, where the surface wind was 16 knots from 130°T. There would have been plenty of fuel to make it to YPCC.
Unfortunately it does not fit a MEFE at 00:17:30 UTC.
@sk599
I find your latest comment a bit schizophrenic. On one hand you show how the satellite data is very sensitive to small changes in initial bearing or flight level, on the other hand you reject BTORs or BFORs within an appropriate range as a meaningful differentiator.
You can’t have it both ways.
We have amply demonstrated that the BTORs, BFORs, fuel constraints and GSE are all good differentiators of the actual MH370 flight path.
@sk999 said: Note that I do not enforce compliance with the Vincenty formula during the numerical integration.
Bobby, Richard, and I spent some time comparing our numerical methods. I generate paths by numerical integration, probably similar to what you do. Bobby uses the Vincenty formula for great circle paths. I believe Richard has at times used both. The bottom line is that if properly implemented, including an adjustment for altitude, the results yield essentially equal results for great circle paths. (We’ve used on-line calculators as the final arbiter for the great circle paths, recognizing that the distances are slightly off because those on-line calculators implicitly assume an altitude of zero.) If you are seeing a large discrepancy, I suspect there is an error in your method.
@DennisW said: It is an [exercise] in futility.
It is not certain that this effort will result in a search that finds the plane. However, our choices are to call it quits, or to determine if there is something that is objectively unique about this path that would support a search in this area. I have not seen another analysis that defines a different area that is manageable in size, is objectively of high priority, and has a reasonable chance of success.
@David: What you propose might have transpired.
Although I think William Langewiesche did a respectable job at summarizing the incident, and his piece might be the narrative that most people reference in the future, we have to acknowledge what it is. He spent several weeks, conducting long interviews with people like Mike and me, traveled to Malaysia to meet and talk with more people like Blaine, Grace Nathan, and friends of the captain, and then he took what he learned, combined it with his knowledge of aviation and common sense, and assembled the piece into an engaging story. There is nothing new in that story. Even the quotes from the pilot-friend of the captain are similar to statements made previously by retired Malaysia Airlines chief pilot Nik Huzlan.
I’ll add that there is another version of the story that some knowledgeable people believe. In that version, the captain expected to be shot down, first by Malaysia (as evidenced by a path that passes near Butterworth), and then by Indonesia. When neither country responded, his third option was the dump in the SIO. For a number of reasons, I’m not a fan of this theory.
@David
@Victor
I agree with David’s point that MH370 might have been trying for many countries radar to see MH370 flying over Malaysia, hence FL400 at IGARI. if alive and active, I do not know what style crash was being tried for (I am still thinking sinking in Broken Ridge or other deep spot).
I agree with with Victor’s alternate version, that intercept/shoot down by Malaysia, although maybe not Plan A, might have been a concern or possibility that was planned around. My personal feeling is the perp was trying for deniability in Malaysia, so I am thinking a number of steps might have taken to avoid definitive ID of pilot as the perp (DFDR management etc) in the intercept case.
Re: rescanning areas
as there is discussion about rescanning areas already checked, albeit presumably with newer (OI) technology – how confident should we be in terms of the analysis of the scans already made? There must be certain assumptions made during analysis of scan data (minimum target size etc) that may be invalid in the final result. Does anyone know if the data from the initial scans has been reanalysed some time later (say, following lessons learned from the discovery of the San Juan) or not?
it would be shit, but also very human, if we already had the information we needed to solve the problem but we’re just looking at it in the wrong way.
To be clear, I asked Richard to run the case approximating IGOGU+186T so as to be able to compare exact like cases computed by his model and Barry’s model. I expected slightly different results and they are slightly different. As time permits I am studying Richard’s results and will comment when I have some conclusion to state.
The case I proposed is a simplified version of the complete path from 18:22 to splash which satisfies other constraints such as the FMT time at a waypoint and an azimuth that corresponds to a minimum total error in the combined normalized errors of the BFO and BTO.
Due to the differing atmospheric models, adjusting the value of M slightly to achieve the minimum BTO error is merely using a “variable constant” to tweak the model. One could have chosen a slightly different cruise altitude etc.
Patience.
@Sid, @Richard, @Victor, @Don
Concerning: Satellite height contribution to BFO.
When I did the calculations I found deviations from 0Hz (around 19:41) to 7Hz (last points). Up to 40% of this may in principle be due to higher order effects which I ignored by using perturbation calculations of the satellite non-ideal effects. However, it would be strange that the size of the deviations should fit the size of the satellite height contribution (when compared to the Ashton paper, table 9).
On the other hand it is a relatively small effect compared to the effect an open door would have, so it is not possible to make a rigorous disentanglement.
Effects from cycling temperature and pressure of the SDU oscillator are most likely somewhere in-between these two in magnitude, so that alone makes rigorous disentanglement impossible.
Finally, there are some minor effects of not using a proper inertial system and (even smaller) effects from ignoring the gravitational red shift.
At the time I did the original calculations all these effects made me conclude that the absolute BFO uncertainty was most likely higher than 7Hz. I handled this by giving the BFO a low weight in the optimization. This means that any errors below 15Hz are unlikely to have significantly affected the end result. However, the disadvantage is that one must use other information to choose the correct end point (around 34.4S or around 13.4S).
@Ventus45
CC02 is directly on track beyond ISBIX and would be an acceptable waypoint it seems. CC02 does not show on the SkyVector chart, but SkyVector will accept it as an input.
I presume that it is a local waypoint associated with an approach to Cocos.
Would this be known to a person using a computer-simiulated flight?
@vodkaferret asked “how confident should we be in terms of the analysis of the scans already made?”
Fugro’s delivery to ATSB involved a range of measures that assessed confidence for their work. The work is described in the ATSB Operational Search report.
Phoenix International, contracted by Malaysian parties, operated separately from Fugro. It is my understanding that the products from this work were submitted to some, but not all, of the quality assurance procedures that Fugro, ATSB, and Geoscience Australia applied to the data Fugro acquired.
And “Does anyone know if the data from the initial scans has been reanalysed some time later.”
I’m not aware of any project that has undertaken wholesale re-analysis of the data acquired during the seafloor search. That would be require a significant effort.
At present, I’m working to re-evaluate some of the ‘data holiday’ categories.
@Victor
@DennisW said: It is an [exercise] in futility.
It is not certain that this effort will result in a search that finds the plane. However, our choices are to call it quits, or to determine if there is something that is objectively unique about this path that would support a search in this area. I have not seen another analysis that defines a different area that is manageable in size, is objectively of high priority, and has a reasonable chance of success.
The probability (90%) is that the aircraft wreckage is in an area that has not been scanned. Lower it to 80% if it makes you feel better. How on earth can anyone propose searching at 34S unless you believe in the dive-glide-dive scenario?
@Sid Bennet asked: Would this be known to a person using a computer-simiulated flight?
CC2 is the “transition” waypoint for the VORY15 and VORY33 approaches. If YPCC was selected as the destination airport, and either the VORY15 or VORY33 approaches was subsequently selected, then CC2 can optionally be chosen to be part of the route.
That said, I don’t see a reason for doing this if a landing at YPCC was anticipated, nor do I see a reason for faking an approach to an airport with no approach radar.
@DennisW: How do you explain the discovery of the San Juan after it was missed the first pass? In that case, the first pass was using AUVs; in this case, the first pass for much of the area was using a towfish, which cannot be used to scan steep slopes.
We are prioritizing among options, none of which are “unblemished”. We would be making a recommendation with the understanding that there is no guarantee of success. OI seems to have some interest in pursuing a new search, and we owe it to them to provide them with data and analyses to help them make their decisions.
@DennisW
Great science! “Attack! Attack!”
You stated “How on earth can anyone propose searching at 34S unless you believe in the dive-glide-dive scenario?”
The answer is because (unlike you), we have done our homework.
@DennisW: I’ll give you another example of how success probabilities might be incorrectly applied. In the case of AF447, an area of the seabed was “cleared” after neither the pinger from the FDR or CVR was detected in that area. Metron’s main contribution to the search was to consider that there was a finite probability that either both pingers failed, or one or both was operating but not detected (rather than assigning these probabilities as zero). On this basis, the previously cleared area was scanned, and the debris field was found.
@Richard
Great science! “Attack! Attack!”
I am not attacking you. I am simply looking at probabilities. A 10% (or 20%) probability is not zero. It simply makes more sense to dedicate resources to an 80% or 90% probability. Hey, you are doing the work. Far be it for me to criticize you for that, although applying Gaussian stats to a non-stationary and non-ergodic process is unforgivable.
@Victor
Same general theme in response to your examples. Of course, it is possible that the wreckage was missed.
@DennisW
You stated “applying Gaussian stats to a non-stationary and non-ergodic process is unforgivable.”
I left out the BFO result, just for you and still proved my point!
@DennisW
I look forward to the long awaited final report. I will not go easy on it.
Looks like you already made up your mind…
How is that constructive or helpful?
@DennisW
Can you give us some relevant stationary and ergodic processes?
@ArthurC
A great deal has been written on positive and negative feedback. The studies always conclude that positive feedback is more beneficial when dealing with beginners, and that negative feedback is more beneficial when dealing with experts. I regard Richard and Victor as experts.
@Victor
RE: ‘CC2 is the “transition” waypoint for the VORY15 and VORY33 approaches. If YPCC was selected as the destination airport, and either the VORY15 or VORY33 approaches was subsequently selected, then CC2 can optionally be chosen to be part of the route.’
It’s interesting that CC02 is included in the FMC database as a transition for the VOR approaches to YPCC. CC02 is not on an airway and it is not part of any published approach procedure for YPCC. I wonder where it came from?
@Sid
Most things are stationary and ergodic. A simple example is the roll of a pair of dice.
If you roll one pair of dice 100 times or 100 pair of dice once, the statistics will be the same – the process is ergodic. It is also stationary. You will get the same result on Sunday that you did on Saturday. The distribution of height for 1000 men in California will be the same as 1000 men in Pennsylvania. Although the California men will probably have a higher average IQ.
@Sid
On the other hand 10 random walks of 20 steps will not have the same mean and variance as a single random walk of 200 steps.
@Andrew: I made a mistake. There is no CC02 in the FMC database, as far as I can tell. The CC2 transition I was looking at refers to an approach with a hold at fix CC. Here’s the language, including the go-around:
APPROACH VORY15 FIX FS15Y AT OR ABOVE 1300 RNW 15 FIX CC AT OR ABOVE 510 TRK 151 UNTIL 1500
TRANSITION CC2 HOLD AT FIX CC LEFT TURN INBOUNDCOURSE 308 ALT 1500 SPEED 210 LEGTIME 1 TRK 316 UNTIL 7.5 FROM FIX CC
where CC is S 12 12.0345 E 96 50.45382
and FS15Y is S 12 6.92298 E 96 47.208
@DennisW
It is some 50 years since that I first dealt with this subject, reading Weiner’s little book.
The average height of the population of California has increased over the past century. As such the mean height is a function of time and the process is not stationary.
In reality, the mathematics of sadistics only approximates reality and it is the judicious application of the math that helps us reach practical conclusions.
Most of the math blows up at the short and long time scales.
@Sid
Yes. BMI has changed a lot over the last century as well.
@DennisW,
@Sid Bennett,
The Inmarsat BFO values contain contributions from at least 3 independent sources of error.
On short time scales, less than a few minutes, OCXO frequency noise is negligibly small and is immaterial. The dominant sources of noise are two: (1) a random, stationary, and ergodic electronic read noise of about +/- 1 Hz, and (2) systematic transmit frequency errors in the AES which are caused by the use of limited precision trigonometric functions used in computing the compensation frequency value. These computational errors typically produce a sawtooth error pattern of several Hz peak-to-peak. You don’t see these when the aircraft is at the gate because the aircraft is stationary with respect to the assumed satellite location, and therefore the compensation frequency is constant. When the aircraft is flying, the sawtooth period and amplitude vary along a route in a way which we cannot predict because we do not have the software used in the AES (although DSTG did). The impact of these transmit frequency errors is to induce an identical pattern in the observed BFO values. Thus, all BFO values during the MH370 flight period contain both the small random electronic read noise and the transmit frequency errors caused by trig function errors.
We also know something about the OCXO frequency drift, which becomes important on time scales of hours and longer. Whenever the observed frequency drifts more than 16 Hz from its nominal value (and when on the ground and after at least 24 hours), a transmit frequency offset correction is made of 16 Hz in the AES. Reportedly, this happens occasionally, but not every day. So, the typical OCXO drift is less than 16 Hz per day. During the period of interest in fitting routes from 19:41 to 00:11, the elapsed time is 4.5 hours. Then,with a typical drift of less than 16 Hz/day, over 4.5 hours the typical drift would be less than 7 Hz assuming the drift varies as the square root of time.
In their MH370 paper, Inmarsat says: “Figure 15 shows the measured BFO for flight MH21 that travelled from Kuala Lumpur to Amsterdam at the same time as the MH370’s final flight, overlaid with the upper and lower BFO predictions (± 7Hz) using the refined BFO model. This suggests that ±7Hz is a conservative estimate of the typical accuracy BFO calculation achieves, as well as illustrating the BFO versus time characteristics for a flight moving along a path close to the Northern route. While the validation demonstrates the general accuracy of the BFO technique, it is important to note that agreement is only achieved with ±7 Hz accuracy during this flight, and to assume better accuracy for the measurements taken on MH370 would be unrealistic.” So, Inmarsat says the BFO errors on a single flight should be within +/- 7 Hz.
In their book on MH370, DSTG said: “Empirical statistics of the residual measurement noise w^BFO/k were determined using the previous 20 flights of 9M-MRO. Data points corresponding to when the aircraft was climbing or descending were excluded. . . . The statistics show that even when outliers are discarded a standard deviation of about 4.3 Hz is applicable. As discussed above, to be conservative and allow for potential variation in the d f bias k (xk; sk) value on the accident flight, our model assumes a noise standard deviation of 7 Hz. Section 5.5 illustrates the sensitivity of the BTO and BFO measurements to variations in the aircraft state. Figure 5.5 shows a histogram of the 3392 in-flight BFO errors. On-tarmac BFO errors were excluded due to the pre-biasing described above. A Gaussian fit to the distribution is shown as a black line. It can be seen that the distribution shows some non-Gaussian features and the tails of the distribution.”
In my analysis, I use the same PDF shown in Figure 5.5 by DSTG. Roughly only about 10% of the values in the tails lie outside of the +/- 7 Hz Inmarsat criterion. So, I would say that the Inmarsat (+/- 7 Hz) and the DSTG (4.3 Hz standard deviation) criteria of BFO errors are generally consistent with one another.
What I do is different than what DSTG did in one way. They broadened the standard deviation of the BFO errors to accommodate an unknown shift in the bias frequency. When evaluating a single trial route, I find the mean BFO error but I don’t use it as a figure of merit, because the mean might have been significantly affected by a cold soak immediately after diversion for up to an hour. Typically I see a mean value of about -3 Hz when I use the bias frequency which best fits the KLIA data before take-off. I do use the standard deviation (about the mean) of the BFO error during the flight as a figure of merit, just as Inmarsat and DSTG did. It is a perfectly valid method since we have data from at least 20 flights informing us of the probability density function. Trial routes which have BFO errors inconsistent with the PDF in Figure 5.5 are suspect. It’s a silly notion to discard the BFO residuals altogether. We have exactly what we need in Figure 5.5 to do an appropriate comparison and evaluation to see if the BFO errors are larger than typical values, in which case systematic route parameter errors may be contributing in a significant way. Some trial routes I have fitted show BFO residuals similar to Inmarsat’s Figure 15, being within about +/- 4-5 Hz.
So, let’s not throw out the baby with the bath water. The BFO data are actually well understood and their dispersion about their mean is a useful figure of merit for comparing MH370 trial routes.
@Victor
RE: “The CC2 transition I was looking at refers to an approach with a hold at fix CC.”
Thanks – there are two variations of the VOR-Y 15 approach, one for Cat A/B aircraft and the other for Cat C/D aircraft. The ‘Cat’ is the ICAO PANS-OPS aircraft category, which is based on the aircraft’s approach speed at its maximum landing weight. In this case, ‘CC2’ refers to the Cat A/B approach; CC2 is not a waypoint.
FWIW, the B777 is a Cat D aircraft and would therefore fly the Cat C/D approach, which is the CC1 transition.
@Sid Bennett
Re your August 6, 2019 at 10:36 am
Some time ago, Warren Plats compiled a kmz file of waypoints (which is what I have in my Google Earth) in the SIO (and elsewhere) presumably sourced from the on line aviation sim community, of which we know Z was an avid member.
I think it is more than likely that Z had similar (perhaps even the same) data in his home simulator.
On further investigation, I have discovered that Waypoints CC01 and CC02 are two out of ELEVEN (CC01 to CC11) on what appears to be a custom SIM gamer’s air route, between YPCC (Cocos Island Airport) and VRMM (Velana International Airport). See skyvector links below.
https://skyvector.com/?ll=-3.7984839775168275,89.85937500369423&chart=304&zoom=8&fpl=N0480F350%20YPCC%20CC01%20CC02%20CC03%20CC04%20CC05%20CC06%20CC07%20CC08%20CC09%20CC10%20CC11%20VRMM
https://skyvector.com/api/navlog?94581
So the plot perhaps thickens somewhat.
Any sim pilot planning a flight to Cocos Island would have that information, or access to it.
I wonder what TimR might make of this ?
@Ventus said: Any sim pilot planning a flight to Cocos Island would have that information, or access to it.
I don’t know who defined those waypoints, but they are NOT fixes included in my “AIRAC Cycle : 1309 (22/AUG/2013 – 18/SEP/2013) – Ver.1”, nor are they part of any SID or STAR. I really doubt they are supplied as part of the navigation database of 9M-MRO.
@DrB
You say It is a perfectly valid method since we have data from at least 20 flights informing us of the probability density function.
Figure 5.5 of the DSTG book was created using almost 3400 BFO measurements from 20 different flights. The fact that the mean BFO error reported by the DSTG is near zero is indicative that the DSTG treated the data as an ensemble of measurements. Do you really believe the mean BFO error of any of the 20 flights was on the order of 0.20 Hz (as reported in Table 5.1)? The mean value of an ensemble of random walks is indeed near zero. The mean value of any one random walk is very unlikely to be close zero. The PDF of the ensemble is not the same as the PDF of any single member of the ensemble for non-ergodic processes.
You say The BFO data are actually well understood and their dispersion about their mean is a useful figure of merit for comparing MH370 trial routes.
That is good news. Can you explain the results shown in figure 5.4 of the DSTG book? I do agree that the BFO data is well understood, and cannot be used as a flight path qualifier. I don’t suggest tossing the BFO data out. It is useful for indicating the aircraft flew South after the FMT, and descended very rapidly at the end of the flight.
@Victor
SkyVector accepts and plots CC02.
@DennisW
As DrB rightly points out the hardware-related errors have different behavior at different time scales. DrB’s limits on “measurement noise” are, in my judgment, quite conservative.
I have used a more empirical approach that, once having established the bias offset and any adjustment at each ping ring (mostly at 20:41), the same settings are kept for each path study. While this may have some weakness in that it results in an excellent fit in the best case, the variation of BFO error when other parameters are “adjusted” is smooth and consistent.
The telephone call data qt 18:40 is consistent with the FMT and the BFO error for the second telephone call is quite reasonable. Whether used or not, the result is essentially the same.
It is a mistake not to use the BFO. It is an independent contribution to the determination of position.
Sid Bennet said: The telephone call data [at] 18:40 is consistent with the FMT
It’s also consistent with an ongoing descent at a constant vertical speed. I don’t think we can assume it was one or the other.
@DennisW
You ask “Can you explain the results shown in figure 5.4 of the DSTG book?”
That is easy for a relatively short 3 hour 20 minute flight in a straight line from Mumbai to Kuala Lumpur on 2nd March 2014.
More challenging is the longer 7 hour 50 minute flight from Kuala Lumpur to Amsterdam on the evening of 7th March 2014.
In the Inmarsat paper Fig. 15, we are given a plot of 30 BFO values taken from flight MH16 from Kuala Lumpur to Amsterdam on the evening of 7th March 2014.
In the DSTG book Fig. 9.9, we are given the flight route, altitude, heading and Mach of the flight MH16 from Kuala Lumpur to Amsterdam on the evening of 7th March 2014.
From the DSTG data in their book, I have reconstructed the flight path of MH16 and compared the predicted BFOs to the actual BFOs from the Inmarsat data in their paper.
I find the BFO data to be a reliable indicator of the flight path and not an inconsistent unpredictable erratic non-ergodic data set, as you keep trying to make out.
There are no random walks starting after about 100 seconds into the flight as you claim.
@Victor
For the dual flame-out case, I suppose that implies a passive MH370 was going full speed over Arc6, and almost full speed over Arc6-to-Arc7. As a first approximation, Arc6-to-Arc7 average speed is 95% of full speed. Which allows the following simple calcs:
QUICK and DIRTY ARC6 BFO STUDY (Looking for BFO=252 as Measured)
Arc6 at -10 South BFO=233 Heading=90 Speed(Calc)=319 “Xmas Island Case”
Arc6 at -21 South BFO=238 Heading=139 Speed(Calc)=346 “Zenith Seamount”
Arc6 at -30 South BFO=248 Heading=170 Speed(Calc)=415 “Home Sim Path approx”
Arc6 at -34 South BFO=253 Heading=180 Speed(Calc)=456 “180 South Case”
Arc6 at -37 South BFO=257 Heading=188 Speed(Calc)=467 “38 South Case”
Notes:
(1) Assuming straight True Track passive flight
(2) All flight paths radiate from a 10S 93E central focal point (near BEBIM)
SUMMARY
For a passive flight, assuming Arc6 BFO=252 exact, the 180 South case is the best fit. Speed fit is very good considering the uncertainties. However, keep in mind at Arc5 the 180 South match is not the BFO best (38 South is better there for BFO).
There are two ways to “fix” the BFO to the east if they are too low. If the active pilot changes heading to the North Pole (360 deg North) you can add +10-15 units to the BFO. The is how the Captio (Xmas Island) case gets a more respectable Arc6 BFO.
Secondly, a relatively minor ascent of 600 ft/min also adds about +10 units to the BFO. I feel it is possible an active pilot was ascending into Arc6 in preparation for a longer glide.
@Richard
It is not correct to say the random walk “starts” after any particular time. If I gave that impression I am sorry. The random walk component is always present. It becomes dominant in the Allan Variance of quartz oscillators after about 100 seconds or so.
https://photos.app.goo.gl/QM95HPLQGQv3x6GE8
I don’t get any sense of convergence in our discussions. Probably best at this point to let it lie.
@Victor,
I did not suggest, or mean to suggest, that those waypoints were in 9M-MRO’s FMC, only that they are possibly in Z’s home sim.
Z was known to have numerous other aircraft on his sim as well, not JUST the 777.
Z was also (apparently) known to practice landings at “remote islands”.
Practice landing “what”, on those “remote islands” – a 777 – I doubt it.
It had to be some other aircraft – surely – but what ?
However, going back to all those waypoints themselves, I found it very curious, “very” in fact, that all of those waypoints:-
(a) are in Skyvector in the first place, and
(b) that they are all exactly 150 nm apart.
Why exactly 150 nm apart ?
There has to be a reason for that, don’t you think ?
Skyvector is not just for sim gamers, it has real world use for lightie punters.
So why are those waypoints in Skyvector in the first place ?
Someone put them in, for an obvious reason, to be used in real world.
So who, and why ?
I think I may have a plausible answer for the “why”.
The middle of oceans certainly qualifies as a “designated remote area” for lighties for SARTIME requirements.
Typically, SARTIME reporting protocols for lighties in remote areas are (usually) hourly.
So, what typically cruises at 150 knots, have to report hourly, and could plausibly use the route, and did it often enough to justify making a route template in Skyvector ?
Regular airline service(s) – no way.
But ferry flight(s) – of small stuff – possible / probable.
The de Havilland Canada DHC-6 Twin Otter cruises at 150 knots.
There is a whole fleet of float equipped twotters operating all over the Maldives.
They all had to get there somehow.
Plenty of twotters in Australia also.
Digging around, I found a web site devoted to the twotter with some interesting ferry flight data.
In it I found a few FERRY flights between VRMG and YPCC – IN BOTH DIRECTIONS.
See http://twinotterspotter.blogspot.com/p/dhc-6-ferry-gallery.html
Eg-1: VH-AQU DHC-6-300 SN 557 YSBK Sydney, Australia to Bern, Switzerland.
http://2.bp.blogspot.com/-pBVqDE6p4IM/VGogtkpvRNI/AAAAAAAAIg8/ElOrK5DkUsM/s1600/MAP-VHAQU.gif
http://1.bp.blogspot.com/-xpPblNvfbD8/U2o64QpFrMI/AAAAAAAAGXU/Q2-LV-pyGD4/s640/557_VH-AQU_ECA_SPLIT_04-MAY-2014_EJC_1024A.jpg
Eg-2: F-OIAY DHC-6-300 MSN 507 Gap/Tallard, France to Noumea, New Caledonia
http://2.bp.blogspot.com/-4ou4uYp_qto/VGpC24qs-6I/AAAAAAAAIls/B0DaTmM1vaU/s1600/MAP-F-OIAY.gif
Eg-3: F-OIJI DHC-6-300 MSN 277 Altenrhein, Switzerland to Noumea, New Caledonia
http://2.bp.blogspot.com/-yMAX7dlqz90/VHS2lUAO7xI/AAAAAAAAI3c/ndIss6KrmJo/s1600/MAP-FOIJI.gif
http://1.bp.blogspot.com/-HxDeFYgnKGQ/VHS3U7_7DII/AAAAAAAAI3k/yVEs5eYeRFs/s1600/277_F-OIJI_ERICH_KUNZ_ALTENRHEIN_2009_1024.jpg
Now, do we know if Z had the DHC-6 (or very similar) set up on his home sim ?
@DennisW
You stated “The key takeaway from Figure 2 is that all quartz oscillators are characterized by a random walk in frequency at measurement intervals greater than ~100 seconds. The bounds of the quartz oscillator random walk span two orders of magnitude depending on the crystal cut and oscillator environmental control. The Inmarsat data we have is sampled at ~3600 seconds – well into the random frequency walk region of the quartz oscillator used in the AES.”
There are no random walks starting after about 3600 seconds into the flight as you definitively and reportedly claim.
@Richard
Random walks are just that, random. Still no response on Figure 5.4 of the DSTG book? It is a bit of an “elephant in the room”.
I would really like to see the corresponding plots for the 20 flights referenced by the DSTG. Looking at Figure 5.5 it is clear that variations up to 3 sigma and 4 sigma are present in the data. Not that I endorse the DSTG use of sigma. Nonetheless your setting a threshold for discarding routes near 1 sigma seems restrictive to me when there examples of actual flights significantly exceeding that threshold.
@DennisW
Both @DrB and I have answered your point on Fig. 5.4 in the DSTG book.
You are not listening.
https://www.dropbox.com/s/8d88laf7dsbnkcj/report%20draft%20for%20comment-turn%20time-r2.docx?dl=0
Finally, after browsing my shambolic file system, I came across the summary report that Geoff and I wrote on the studies of the FMT time and azimuth. This was circulated to the IG on or about 15 March 2015, but I do not believe has had wider distribution. So, in reading the report, please remember that it was written 4 years ago.
The data was obtained by running Barry’s model for turns originating along N571 to determine the best resulting azimuth and BTO+BFO error for each turn time (which included a specific best M for each case) and then using the most likely turn time of 18:40, which occurs at IGOGU, to determine the most probable azimuth (186.4T). Turn times after 18:40 are not compatible with a simple path.
I accept that the model currently being used by Richard and similar models have a better model for the met data, but I can see little likelihood that the gross behavior is any different than we previously computed.
Let the debate go on.
@ventus45: I’m really losing you. There is one particular reconstructed path that falls close to a Skyvector waypoint that isn’t part of the navigation database supplied to airlines. I think trying to draw conclusions from this observation is a big stretch.
@Victor – Sorry about the length of this post
@All
The exchange between Richard, DennisW, DrB and Sid Bennett brings to mind:
“It was six men of Indostan, to learning much inclined, who went to see the elephant (Though all of them were blind), that each by observation, …” (from a poem by John Godfrey Saxe)
Four years ago I found the Jeff Wise forum while sitting for three hours a week in an oncology treatment center having a cocktail of poisons pumped into my veins. When Jeff’s forum degenerated into a loony bin of conspiracy theorists I came over to Victor’s site where the original IG members, ALSM/Mike Exner, DrB and other clear headed rational individuals had migrated.
Since retirement the only thing I have used Excel for, was to track my retirement investments and my medical expenses.
I have downloaded Barry Martin’s, YappFF’s, DrBobby’s, one of Richard Godfrey’s and several of Victor’s.
I am pretty damn competent with spreadsheets but I have learned something from each of the spreadsheets.
I am not a script monkey and refuse to copy somebody else’s work without taking it apart and understanding it enough to know it is bug free and can rewrite it myself. I was paid big bucks to fix other people’s code beginning with my employer’s (Sperry Univac 1980-1990).
DrB and Richard are virtuoso’s with Excel. I would not approach the solving problems the way they do tho…300 hours to do an run on a Laptop with an 8-core Intel chip??
Okay…Nature abhors a vacuum…I bought my son a Gateway 386 at 25Mhz that had more horsepower than the 1100/80 main-frame that I had to do software support on for a classified government customer with a 3 letter name (take your pick…I actually did work for both of them). The Radio Shack CoCo2 and CoCo3 computers that he had started on were not enough.
Last year I replaced the mother-board on my circa 2009, HP Compaq 6730b 2.4Ghz laptop when I started getting errors on the disk drive that were actually caused by the interface chip on the mother board.
This also gave me the opportunity to move from Windows XP to Windows 7 and from Office 97 to Office 2003. My Excel models are no longer resource limited. I have always been forced to find the most efficient way to solve problems quickly…I don’t have the patience to wait for Excel Solver to crank through a spreadsheet model if it takes more than 10 seconds!
I have written a number of worksheets to test different hypotheses and path scenarios posted here over the past 3 years.
Richard has 7 parameters to define a path.
Victor’s “Possible MH370 Paths Along Great Circles” tells us we can combine 3 of the parameters into single parameter.
In my model the start latitude and start longitude are set by selecting an azimuth from the 19:41:03 UTC satellite sub-point to a point on the 2nd Arc.
A Scroll Bar control in my sheet varies the azimuth between 88° and 98° which varies the start latitude between +2.5° and -2.5° in 0.001° increments.
A second scroll bar control varies the parameter: crossing bearing at the 19:41 ping ring between 160° and 200° in 0.05° steps.
The third parameter scroll bar varies the height-above-ellipsoid WGS84 from 0 to 40000 feet.
For a survey I only need a great circle…LNAV modes can be determined after a dip is found in the GS residual (GSE)
That’s it…a minimalist approach…
I loaded DrB’s GDAS data from 2017…Excel has a 65k row limit so I had to put the HGTS, TEMP, UWND, VWND data into separate columns…
I decoded the SU data from the unredacted logs and extracted The ACARS position reports…others may have also…
I tested my ISAT calculations against the MH371 ACARS data then had a go at MH370.
Voila I got a hit!
Lat@19:41 -1.2430deg/Lon 93.5829deg
Bearing@19:41 188.18°T
Lat@00:19:37 -38.3291deg/Lon 87.2416deg
ISA h 25712 feet
Geo h 27037 feet
GSE 0.5797 knots RMS
BTOR 22.1 ms RMS
BFOR 2.9942 Hz RMS
Why was MH370 flying at 27037 feet?
I won’t speculate…there are better qualified people here to pursue that question…
@Richard – Look at the BTORs…
From one blind man to another, these BTO residuals are deltas between the great circle test path and the actual path…they are clue to the LNAV mode.
Slant Slant
Range predicted Range
RAES(µs)BTO(µs) BTOR(µs) residual(µs)
122770.0 11870 0.0 0.0
122569.7 11500 0.1 0.0
122702.8 11737 -2.7 -1.3
123262.1 12771 -9.4 -4.7
124204.4 14521 -18.7 -9.3
124695.6 15413 -23.6 -11.8
126082.8 18008 -32.1 -16.1
126266.1 18346 -34.1 -17.1
126266.2 18346 -34.4 -17.2
Sorry about the formatting on the previous post…tabs were causing a problem…
@Don Thompaon
Thank you very much for your answer, and best of luck with your work
on the data holidays. That angle of attack seems far more likely to yield useful results than some of the other approaches being followed and I hope it bears fruit
@victor @Richard @DrB
without prejudice, fully acknowledging the effort and knowledge that you guys have applied to your latest model (and with full thanks for that), understanding that 90% of a large area can mean 10% of a smaller zone and accepting that Victor at least seems to accept the possibility of a piloted ending (not to single Victor out, I’m just not sure what @Richard and @DrB believe)
if (as seems to be the case) your current studies lead you to an area that has been searched to a 90% coverage, which do you believe to be more likely? That MH370 is in the 10%, .. or that your assumptions are flawed??
I’m not trolling, I’m trying to understand the thought process. is it “if a glide started anywhere it most likely started here”, is it “I dont care about the scans, my math says it’s at 34 deg”..?? Because from the outside, and openly admitting I cant understand your level of maths
..if you finish in the 90% zone then the first thing to re-examine would be the assumptions behind the work. At some point Occam’s Razor has to come into play…
@George Tilton
There was a seventh man from Indostan
Who approached the Elephant from behind
The Elephant thought of something quite profound
And dumped shit on all around.
The Elephant was a computer whizz
And soon got everyone in a tizz
But no soooner than he shouted Eureka
A mouse blew him up with a bazooka.
@Richard
I have always been impressed with your work.
And now I see you are quite a wit…
@Richard
Both @DrB and I have answered your point on Fig. 5.4 in the DSTG book.
You are not listening.
That is simply not true.
@DennisW,
You said: “Do you really believe the mean BFO error of any of the 20 flights was on the order of 0.20 Hz (as reported in Table 5.1)?”
I never said that. Why do you ascribe beliefs to me that you make up out of whole cloth? DSTG never said that, either.
The DSTG Table shows an ensemble average value near zero based on 20 flights, where the bias was adjusted on the tarmac at the beginning of each flight. DSTG never said the what the mean was for the in-flight BFO errors for any of the single flights. They only give the ensemble mean. They also did not adjust the bias so that the in-flight mean BFO error was zero. You are misunderstanding and misrepresenting their table. The expected value of the ensemble mean is zero, assuming the OCXO drift is a random walk, so I am not surprised by their result. I would expect the mean of the in-flight BFO errors for a single flight be be within +/- 3.5 Hz, using the tarmac bias, based on my estimate of +/-7 Hz maximum drift in 4.5 hours. Undoubtedly this contributes to the broadening of the ensemble PDF in DSTG’s Figure 5.5. The PDF for a single flight is narrower than the ensemble PDF and has a mean generally displaced from zero.
That DSTG figure uses the tarmac bias. That is exactly what I am doing for MH370. I find the standard deviation about the mean (which is not zero in the case of MH370), but I do not use the mean BFO as a statistic. I do not force the mean to be any particular value. So, that BFO error ensemble PDF from prior flights shown by DSTG is a valid (and conservative) comparison for my BFO standard deviation statistic. The typical mean values I do find are consistent with the expected OCXO drift after take-off. Thus, there is no mystery here, and, while the BFO error value is only predictable within (at most) +/- 7 Hz, the dispersion about the mean is bounded by a well-defined ensemble PDF of errors, as shown by DSTG, which is broader than the PDF for a single flight. Indeed, many flights will have noticeably smaller dispersion about the in-flight mean than predicted by the ensemble average, and this is borne out by the significantly smaller dispersions I (and others, including Inmarsat) have obtained from a number of trial route fits using the MH370 data as well as BFOs from prior flights.
The bottom line is that the ensemble PDF of BFO errors is broader than the expected PDF for a single flight. This reduces the discrimination effectiveness of BFO residuals when fitting trial routes, but still the BFO residuals are useful in that regard.
@DrB
DSTG never said the what the mean was for the in-flight BFO errors for any of the single flights. They only give the ensemble mean.
I thought that is what I said. I also pointed out that the mean of any single flight would depart significantly from zero which is why the use of an ensemble mean as representative of the PDF of any given flight is flawed. I also never attributed any of that to you. I merely asked what you thought about it. Why are you and Richard so sensitive and quarrelsome? I am raising sincere questions not trolling. BTW, I could find nothing relative to an explanation of the DSTG book 5.4 data other than a vague speculation that it had a geographic dependence. No physical explanation.
@Victor,
A big stretch – perhaps – but how long is a piece of string ?
My interest in this idea was simply sparked by the initial observation that Richard’s path crossed CC02, nothing more.
A number of people proposing northern crash locations on the arc have floated the idea of there being a need for a “hold” somewhere.
If a hold was needed, where would he do it. Near Cocos Island would be a sensible location to do it, iff the initial intention was an evental safe landing, presumably at YPCC, but you would do it away from active airways.
If you look at the charts, you will see that the CCxx twotter waypoint route lies between routes T41 and M641.
BEBIM is on T41 at 200nm from Cocos on the 300 radial.
M641 outbound Cocos is on the 320 radial.
CC01 is 150nm from Cocos on the 307 radial, and CC02 is 300nm also on the 307 radial.
Cocos also has a VOR and an NDB.
If you were going to set up a hold anywhere reasonably close to YPCC, simply select that airport in the FMC (and I am presuming that YPCC was in 9M-MRO’s database) and then, at some point after 20:41, (and perhaps “knowing” from his sim that CC001 was at 150nm on the 307 radial) simply turn off the southern track when the FMC showed that the heading towards YPCC was 127.
Then, proceed inbound to 150nm, within range of the navaids, tune an aid, and then simply set up the hold at 150nm.
You don’t need a waypoint in a database to do that.
Now, how long do you hold here ?
I got interested in the idea, when I observed that CC01 is almost bang on the 21:41 arc.
In the image below:
T41 is the purple airway.
M641 is the red airway.
Richard’s path is light brown (at left) with position at 20:41 near the 20:41 arc (green at left).
The airway between YPCC and the Maldives containing the “CCxx” waypoints is the Light Blue line.
https://www.dropbox.com/s/4zvj5olgxuperw5/Possible%20hold%20at%20CC01%20-%20Dropbox.png?dl=0
The proposed possible hold is at CC01 on the intersection of the light blue airway and the green 21:41 arc.
@ventus45: I disagree with much of what you wrote, including the description of how a B777 pilot would likely “tune in a VOR”, as well as the likely location for a holding pattern, but we are all just hypothesizing, so I’ll just leave it at that.
@DennisW
Great that you take the fight on the statistics of the oscillator drift. That is the key to understanding the problems with the BFO.
@All
Please do not forget that the oscillator was almost certainly cycled violently before 18:21. If that had not happened I would be willing to accept the pragmatic approach from Inmarsat to use a (normal) uncertainty of 7Hz. It is conceptually wrong but works in most practical cases.
However, after a violent cycling the problems brought up by @DennisW increase dramatically and become dominant. Therefore it is simply wrong to use a 4Hz value, and highly questionable to stick to 7Hz.
There are many scientific papers describing the fundamental problems involved. Take for instance a look at this Physics Today paper from 1991:
H. Scher, M.F. Shlesinger and J.T. Bendler, Phys. Today volume 44, page 26 (1991)
“violent cycling “? 100% Rubbish. The OCXO is designed to start cold from any temp between -55C and +55C, and achieve the nominal stable frequency within a few minutes. No problem. Nothing violent about it. Where did you get that shit?
@Richard
I’d be interested in your critique of the older IG 186 deg path by Yap FF. It seems to have quite good BTO/BFO fit but I am not good at judging BTO fit.
A few of us still use the YAPFF spreadsheet version of the path. I use it mainly as a prototype of a good path to 38 South.
Link in reference #4 below:
http://www.duncansteel.com/archives/1366
@DennisW
You asked “Why are you so sensitive and quarrelsome?”
Complete nonsense! I am presenting facts, which you are ignoring.
For example, yesterday I presented an analysis of the 30 BFO values taken from the MH16 from Kuala Lumpur to Amsterdam on the evening of 7th March 2014. I compared the Inmarsat paper Fig. 15 with the DSTG book Fig. 9.9.
I found the BFO data to be a reliable indicator of the flight path and not an inconsistent unpredictable erratic non-ergodic data set, as you are claiming.
The standard deviation of the BFOR for this flight is 4.5474 Hz.
I agree that BFO is a bit sensitive when the aircraft is turning or climbing, which produced the BFOR peaks ± 7 Hz observed by the DSTG, but in a stable cruise the BFOR is ± 3 Hz.
@DennisW
You stated “I could find nothing relative to an explanation of the DSTG book 5.4 data other than a vague speculation that it had a geographic dependence. No physical explanation.”
The DSTG book Fig. 5.4 shows a flight on 2nd March 2014 from Mumbai to Kuala Lumpur. You will find more details on this flight in Fig. 9.3.
For the majority of the flight the BFORs were between 0 Hz and -10 Hz. The 16 Hz deviation limit had not been reached on the ground in Mumbai and the BTO Offset did not require re-calibration.
At around 22:20 UTC Fig 5.4 shows the BFORs were between +10 Hz and -20 Hz. From Fig. 9.3 you can see the aircraft was turning at this time. We know that the BFO data is very sensitive to the aircraft turning, climbing or descending. We also know that the BFO can be affected by the proximity to buildings or when taxiing on the ground. In the cruise BFOR can be affected by turbulence.
The BFOR was around 0 Hz at 18:15 UTC on the ground in Mumbai.
The BFOR in the cruise from 19:20 UTC onwards varies between 0 Hz and -10 Hz because there were several turns and a step climb at 21:20 UTC. The aircraft started descending at 22:45 UTC and you see the variation in BFOR between 0 Hz and -10 Hz again.
The BFOR was around -10 Hz at 23:30 UTC on the ground in Kuala Lumpur. It is possible that the aircraft was taxiing or being towed at this time.
In my view, this is a physical explanation of the BFOR peaks.
@Richard
Thank you for your data-driven comments on Fig. 5.4 of the DSTG paper.
I feel certain that the DSTG team decided that it was too difficult to model the details of the actual flight dynamics for the additional cases. it was easier to choose a large SD since it was apparently not inconsistent with their conclusions. It is a pity that the data sets they used are not publicly available. As I understand it, some peer-reviewed scientific journals require the background data to be publicly available.
@airsealandman
Agreed. Who would buy a OCXO that was so erratic in its characteristics? The power to the unit is often cycled over the live of the equipment. Also, if memory serves, the oscillator error is one of the criteria for enabling the transmissions, to ensure that warm up has completed. I can’t remember the details, but I am sure you do.
@airlandseaman
Cycling the oscillator to a temperature of potentially -60 degrees, and simultaneously a low pressure is not a normal treatment.
I am convinced it will survive, and that the furnace will still be able to reach its normal temperature within only moderately extra time. However, did anyone ever measure how the offset of the oscillator behaves after this kind of treatment?
I have personally done it to other types of oscillators, and found them trapped in metastable states for hours afterwards.
Viking: “However, did anyone ever measure how the offset of the oscillator behaves after this kind of treatment?”
Are you kidding? Manufacturers and independent researchers have spent decades cycling and perfecting these devices. I have personally tested OCXOs and TCXOs hundreds of times. Some devices do exhibit a very, very small offset following a deep power off thermal cycle, but describing the event as violent is grossly misleading. It is simply not true.
@ALSM
Re: OXCO I think many people over-react to the depressurization/temperature scenario.
While it is true that the air temperature can dip drastically after a rapid dpressurization, there would not be many Kilograms of cold air left in the aircraft to cool down the metal/interior components by heat transfer. So the remaining air will start to heat back up right away. The interior solid materials could slowly cool if no bleed air. Presuming the OXCO has some insulation presumably cooling would be gradual and I am not sure how cool it would get.
PS- I am thinking if MH370 depressured, perhaps by Penang the pressure is coming back possibly bleed air, so we coud be talking 20-min cooling down.
@Richard
The DSTG figure 5.4 data between ~22:00 and ~22:30 is difficult to reconcile with the constant speed and altitude of the flight at that time. There was a gentle turn, but apart from some work I did quite some time ago based on sensor lag, the affect of turns on BFO has not been characterized to my knowledge. I concluded the affect was quite small even for standard rate 3 degree/second turns.
The fact that the BFO data is non-ergodic and non-stationary is not debatable. It is the reason that Dr. Allan developed the Allan variance used by every oscillator manufacturer.
@DennisW,
I have made a refinement in the way I use the BFOR statistical behavior as one indicator of many in evaluating various trial routes. Previously I ignored the mean and used the standard deviation. However, there is a better way, and that is to simply use the RMS instead of the standard deviation. This method captures the both impact of the non-zero mean of a single flight (caused by potential random walk of the OCXO frequency) as well as the dispersion due to all three sources of BFO error.
From DSTG’s Table 5.1, for the case of in-flight data with outliers excluded, the mean of the ensemble BFOR PDF is 0.18 Hz and the standard deviation is 4.32 Hz. I modeled this distribution using 500,000 random values (matching the gaussian envelope in Figure 5.5), and the resulting average value of the RMS is 4.33 Hz. Obviously, the near-zero mean value produces a RMS expected value very close to the standard deviation. Next, I took 100,000 trials of 5 random values following this same distribution and found the RMS value for each set. As one should expect, the average value of the RMS derived from 5 samples is smaller than the true RMS, being 4.12 Hz. Thus, as expected, the RMS statistic is biased low with only 5 samples. In addition, the standard deviation of the 5-point RMS is 1.33 Hz. So, the 5-point BFOR RMS has an expected value of 4.12 Hz and a standard deviation of 1.33 Hz. To assess a trial route, I find the Z-statistic where Z = (RMS – 4.11)/1.33 and then I find the probability using the normal PDF.
Otherwise good fits of trial routes have 5-point BFOR RMS values near 3.8 Hz, within 0.22 sigma of the expected value of 4.11 Hz. For comparison, the mean is near -3.4 Hz and the standard deviation is near 2.0 Hz.
Using the RMS BFOR statistic in my route fitter, and using a BFO bias determined from the tarmac BFOs before take-off on the same flight (as I do), is consistent with DSTG’s Figure 5.5 ensemble PDF. To the extent that random-walk excursions are contained in the BFO errors, they are characterized statistically by the ensemble PDF, and the corresponding probability may be estimated.
@DennisW
Once again you are in denial, even when evidence is presented to you.
You deliberately twist what I stated. You focus on altitude and speed, when I was NOT talking about altitude and speed at 22:20 UTC, I was taking about a significant turn.
You deliberately try to call the turn “gentle”, as if it was of no influence on the BFO.
You continue to cherry pick and ignore hard facts such as a standard deviation BFOR of 4.5 Hz.
You continue to raise Allan Variance as if it had an all encompassing effect on the BFO data.
Listen to the experts like Mike, that have been in the aircraft satellite communication business for years.
Your experience is in mobile telecommunications. Viking’s experience is in completely different engineering fields. But you both know better than the experts. And you are both buried in your pre-conceived ideas.
@Richard
Would you please explain how turns at constant atitude affect BFO? The reason I called the turn gentle is because it was gentle (10 degrees). I have not seen anyone on this blog attempt to attribute BFO change to a turn except some work I did in September of 2015.
I thought the DSTG reference, “structured bias”, to the errors shown in figure 5.4 was appropriate. The errors are clearly not “white”. Quote from DSTG paper below.
The mean bias is different between flights and even within a single flight there is evidence of structured variation.
The variations in bias shown in Fig. 5.4 happen over a timescale of minutes rather than hours. In the accident flight the available BFO values are generally at least an hour apart. This is a relatively long time compared with the correlation structure of the error, so the model does not use a coloured noise model for the BFO. However, the drift of the BFO bias means that it is not sufficient to assume that δ f bias
k (xk ,sk ) will be the same in flight as on the tarmac before takeoff. The potential variations were incorporated by modeling the BFO bias as an unknown constant with a prior mean given by the tarmac value and a standard deviation of 25 Hz.
Two interesting things (to me) about the quote are:
1> The BFO error was calculated using the tarmac bias for each flight. Not the ensemble mean bias, and it is not sufficient to assume the bias is the same thoughout the flight as it was measured on the tarmac.
2> A standard deviation of 25Hz for was used for the bias drift in the Bayesian model.
My feedback to you is based on the well known Sagan standard “extraordinary claims require extraordinary evidence”. You are proposing searching an area that has already been searched with at best a 20% probability that the debris was missed (I doubled it from the 10% probabilty estimated by Metron to be generous). I am not endorsing a dive-glide-dive scenario. The use of a 4.5Hz BFO route rejection criterion is simply not justifiable. Even if one accepts the 4.5 Hz standard deviation bound on BFO, that implies a 32% possibility that a valid route is rejected.
It has norhing to do with being “buried in any pre-conceived ideas”.
@DennisW
You asked “Would you please explain how turns at constant altitude affect BFO?”
I am surprised by your question.
I will try to explain simply, but I do not want to insult your intelligence.
If you want a more complicated answer, then please let me know.
The BFO is the doppler shift between the velocity of a moving satellite and the velocity of a moving aircraft.
The satellite has a velocity in the x, y and z planes, which I will call VSx, VSy and VSz.
The aircraft has a velocity in the x, y and z planes, which I will call VAx, VAy and VAz.
If the altitude is constant, then VAz is zero.
If the aircraft is turning, then VAx and VAy are both changing, hence the sum of VAx-VSx, VAy-VSy, VAz-VSz is changing.
This effects the Aircraft Compensation Doppler and Aircraft Satellite Uplink Doppler, which in turn effects the overall Doppler calculation. The Perth Satellite Downlink Doppler, EAFC Eclipse Effect are not affected.
@Richard
Of course aircraft and satellite motion affects the Doppler. I am assuming your VAx, VAy and VAz are referenced to the aircraft local tangent plane and not ECEF (otherwise VAz is not zero at constant altitude). The BFOR exists only because the AES uses a stationary satellite position over the equator and does not use actual satellite position and velocity (nor changes in aircraft altitude) to calculate the Doppler compensation.
A small ground track change over a short time period has a neglible effect on the DIFFERENCE between actual satellite-aircraft Doppler and the Doppler compensation performed by the AES. Our calculation of descent rate based on BFO at the end of the flight does not even consider changes in aircraft heading as the plane spirals to the sea. It is assumed that the Doppler compensation takes care of that.
The work I performed earlier considered sensor update rate (latency in the information provided to calculate Doppler compensation) during turns.
A thought question.
Can a broadly stationary process convey any information in a Shannon sense?
@airlandseaman
Concerning the cycling to low pressure and temperature and back, I am pretty sure manufactures test if the devices survive this. The problem is how they behave for the first hours to days following such a treatment. If the oscillator is just 5 ppb off its center frequency we are in trouble.
Many things can cause such a deviation. A possible scenario which is often overlooked in testing is:
(1) Slow cooling to low temperature and pressure
(2) Relatively rapid reheating to room temperature and return to normal pressure at significant humidity
(3) Shortly after this repower the device.
During reheating and return to normal pressure water vapor may have been driven into the device and condensed to ice. Repowering causes a ‘lake’ of water around it. I have seen exactly that effect casing severe problems.
@Sid Bennett
What is your definition of a ‘broadly stationary process’?
@Viking
🙂
@Richard
Concerning the rest of your objections from August 1:
(d) I am sorry for not looking carefully enough for all known details about the compensation routine. However, I am still not convinced it was published in full detail by a reliable source at any time. You are welcome to correct me if you think I am wrong.
(2) I had very good reasons to consider the full geometric model along with various approximations. First of all to test the full model in limiting cases. Secondly to develop compact formulas with (preferably) linear relationships to illustrate particular effects. Thirdly for the specific analysis around 19:41. In this case, I did in fact also develop the solutions to second order, but spared the readers for the ugly formulas in the paper. As you may have noticed, I did the same to test for the maximum errors possible for the first order perturbation approach to the non-ideal part of the satellite movement.
Specifically concerning the use of an approximately spherical earth, I did this to avoid errors in the analysis and to allow for analytical formulas for the optimization. My routine can run without analytical formulas, but I prefer the analytical versions since they are easy to debug. Conversion to the fully oblate solution is simple and very accurate. To be completely sure I plotted all solutions in Google earth and tested the precision.
(3) It seems like you overlooked (perhaps my error due to limited graphical resolution in figure 4) that in my model the airplane does not return to the full height and speed until around 21:20 (not at 20:41). This may be the main reason for your simulation not agreeing with mine.
In addition, I do not rule out that some systems may have been shut off to save fuel after a potential parachute jump. This may explain why it looks like the second engine flames out 5.5 minutes later than your accurate fuel model predicts. It would also mean a potentially larger temperature correction for the SDU, which may reduce (but not eliminate) our disagreement on the BFO numbers.
Concerning the drift analysis, you used my calculated end-point, not the end-point for the contrail. When taking the influence of the hurricane into account this makes a large difference. Are you able to make one more run starting at 13.42S, 106.66E and take the effect of the hurricane into account?
@viking
Not posted here in a while (life circumstances). Have still been casually observing!
@Viking can you please if possible post me the link for your oblate version for a butchers.
As for your last paragraph, I found this http://mh370-captio.net/wp-content/uploads/CAPTIO-Debris-Drift-Analysis-v2b.pdf
@George Tilton
I have run a LNAV path from your start point 1.2340°S 93.5829°E at 19:41:03 UTC at FL259.3 (27,037 feet). My end point at 00:19:37 UTC near the 7th Arc is 38.33°S 87.24°E (You also calculate 38.33°S 87.24°E). By the way, my model runs in 4.3 seconds, I do not know where you get the idea it takes 300 hours! You also cannot have a copy of my latest model, as I have not published it yet! The versions I have previously published in 2015 bear little resemblance to my current flight model.
You do not mention the speed mode in your comment. The average GS from your co-ordinates is 484.2029 knots and given the winds en-route, the average TAS is 483.2557 knots. This implies an average Mach of 0.791, which in turn implies a CAS of 327 knots, very close to Vmo.
The results are in the link below:
https://www.dropbox.com/s/qjf51quh5jwkhtp/MH370%20Flight%20Path%20Model%20V19.8%20RG%20LNAV%20188.2%20CM%200.7910%20FL%20259%20George%20Tilton.png?dl=0
The standard deviation BTOR is 50.6 µs (nominal < 40 µs), the standard deviation BFOR is 5.3 Hz (nominal < 5 Hz), the PDA is -4.7% (nominal 1.5%) and the RMS GSE is 2.8 knots (nominal 1.5 knots), which are too high.
The BTOR at 22:41:22 UTC is -91.6 µs and at 00:11:00 UTC is -101.4 µs, which are too high. The BFOR at 19:41:03 UTC is -9.4 Hz, which is also too high. There is also 841 kg too little fuel to reach a MEFE at 00:17:30 UTC.
@DennisW
If you already know the answer to your question “Would you please explain how turns at constant altitude affect BFO?”, why did you ask your question?
As I mentioned, your question surprised me, because I thought you must know the answer already and, low and behold, you do already know the answer.
I apologised for giving you an oversimplified answer and asked you to let me know if you wanted a more complicated answer. Instead you criticise me for giving an oversimplified response. Obviously, it was just a trick question and you are trying to play games with me.
You state “The work you performed earlier considered sensor update rate (latency in the information provided to calculate Doppler compensation) during turns.” So you have already analysed this question and answered this question already. Have you published this work?
You will then know, that the AES compensation does not completely take care of turns, climbs or descents.
There is an incomplete AES compensation for Aircraft Satellite range rate changes during a turn.
There is no AES compensation for ROC during a climb or descent.
The AES also behaves differently on the ground than in the cruise.
I will no longer be answering any more of your (trick) questions as you are clearly intent on just playing games.
@Richard G., @DennisW: I hope I am not putting fuel on the fire, but I’d like to put this to bed.
I think that if there is additional BFO error during the turn, it might be due to one of the following:
1) The AES compensation algorithm uses the wrong track angle due to a lag in the system (although it’s not apparent to me where that lag would be introduced considering the high update rates of the navigation data).
2) The AES compensation algorithm doesn’t compensate for antenna motion caused by pitch, roll, and yaw rates.
3) Due to turns, the expected BFOs computed by DSTG are not using the actual track experienced at the time of measured BFO, which produces larger errors when comparing the expected and measured BFO values.
4) Some other effect.
Which of these do you believe is occurring?
@Victor
During the flight of MH16, there is a turn at waypoint IGREX at around 17:40:45 UTC. There was no change in aircraft speed or altitude at this point (see DSTG Book Fig. 9.9)
The BFO at 17:37:09 UTC is 158.9552 Hz, which fits the track of 300.9185°T and is 3min 36sec before the waypoint.
The BFO at 17:51:50 UTC is 173.1343 Hz, which fits the new track of 319.5420°T and is 11 min 5 sec after the waypoint.
There are 6 BFO data points in between spanning 14.1791 Hz.
Just before the turn starts there is a small undershoot and just before settling into the new track there is a small overshoot.
These are depicted in the link below, based on Inmarsat Paper Fig. 15:
https://www.dropbox.com/s/1wald8xvqp8bnul/MH16%2007032014%20KUL%20AMS%20BFO%20waypoint%20IGREX%20turn.pdf?dl=0
I suspect there is some lag in the AES compensation algorithm catching up with the satellite antenna motion.
@Richard: OK. At least we are all on the same page.
The lag could be caused by low-pass filtering of the track signal or perhaps there are slew-rate limits imposed on the output of the AES compensation algorithm. I seem to remember reading in the AMSS documentation something to that effect, but it’s been years since I’ve referred back to that documentation.
@Joseph David Coleman
I think this link is the simplest to begin with concerning the oblate versus spherical earth:
https://en.wikipedia.org/wiki/Earth_radius
@Richard
I was not baiting you. Yes, I had an opionion. I was sincerely asking because I thought I might be missing something. No one else (to my knowledge except me) ever published anything on BFO error related to turns at constant altitude. I did link the work I did here (Sept. 2015), but since have used that website for all sorts of things unrelated to MH370 (motorcycle dynamics, Vendee Globe, pricing theory,…) so I deleted access to it for MH370 purposes. I’ll see if I can copy the info to Googles docs. I am not very proud of it. What I found was a BFO error of ~5Hz per degree of track angle error. I estimated a track angle error 0.3 degrees with a turn rate of 6 degrees per second (double standard rate turn) using an update rate of 20Hz (suggested by ALSM IIRC).
@Victor
I believe that there is very little contribution to BFO error due to turns at constant altitude for the reason you state – the update rate of the sensors is high.
@Victor
Great explanation for the sensitivity to turns due to the filtering. In optics we call it the stochastic realization shift. Here are two references:
https://www.sciencedirect.com/science/article/pii/003040189190397V
https://journals.aps.org/pra/pdf/10.1103/PhysRevA.49.2861
@Sid Bennett
Was this the reason for your Shannon-question?
Viking: You don’t seem to appreciate the fact that (1) the OCXO in an AES is hermetically sealed (moisture on the outside is irrelevant; ambient pressure also irrelevant) and (2) the rate of change of temperature inside a double oven is very different from changes in ambient temperature.
Re-trace error is a real issue, but a minimal effect for a short power off period. When researchers try to quantify re-trace error, the OCXO is typically turned off for 1 to 14 days, then re-powered. In those cases, retrace error immediately following thermal equilibrium can be OTOO 5ppb, but that error gradually goes away and the previous frequency and long term drift is re-established after a week or so. In the case of the power cycle at 18:23, the OCXO power had been off for 1 hour max (and maybe less). It is unlikely that the retrace error in that case would be as high as 5ppb. Something closer to 1ppb is more likely, and that would relax over the next few hours. At 00:17:30, the retrace error was probably zero.
@ALSM
I thought the oscillator used in the AES was a single oven?
@airlandseaman
(1) Even hermetically sealed devices are affected by pressure. Part of the reason is stress effects. Results from an internal NIST report indicate changes around 5Hz for relevant cases.
(2) Since the SDU was off during the cold period the double oven is practically irrelevant (except for a slower thermalization).
(3) Moisture may severely change and/or delay the thermalization after rebooting the SDU, since it changes heat contact and evaporates slowly.
(4) I do agree that most of the effects disappears after a couple of days, but that is too slow for the purpose of MH370 BFO.
@DennisW
I think I also read somewhere that it was a single oven.
@DennisW: There are other factors at play besides the update rate of the navigation data, which provides only the upper limit of response rate. For instance, in the AMSS Section 4.2.3.5.10, the specification places an upper bound of 15 Hz/s on the slew rate of the Doppler compensation. We don’t know what value (less than 15 Hz/s) was actually implemented in the AES. It very well could be that BFO errors increase significantly in turns, as Richard has suggested.
@Joseph David Coleman
Thanks for the link to the CAPTIO debris simulations. I have seen many different ones before, but not this version. It is particularly nice since one can see the dramatic effect of the first hurricane.
Near my position the hurricane was a bit further west. Therefore the fact that the contrail indicates a crash 30 km west of the 7th arc becomes extremely relevant, since otherwise the debris does not get caught by the hurricane and carried 400-500 km south, which is essential to reach Reunion.
@Victor, @DennisW, @Richard
I do not know the front factor for the size of the turn effect on the BFO. It indeed depends on several factors, in particular the width and sharpness of the filters.
However, it is expected to look qualitatively like Richard describes. Take a look at the experimental results in figure 1 of my second reference above.
@Victor
That is why I asked the question in the first place. I don’t pretend to have anything but an opinion based on a four year old sensor update rate analysis.
Also at the time I looked at this issue we did not have any detailed data from a normally functioning aircraft flight path, so the corruption, if any, would be if a turn was in progress during one of the satellite pings. Not a terribly likely (or important) scenario. So I lost interest.
I agree it is an important question given the new state of information we have.
@Viking
I think it is about time to end the debate about stationarity and ergodicity as these mathematical concepts are distracting us. The Allan variance is useful in characterizing the “steady state” behavior of various devices, but does not deal with transients. It does expose long term drift and other parameters that can be used in system models.
When we have focused on the BFO (which is a system parameter comprised of a plurality of oscillators, computations and the effect of the physical motion of the aircraft and the satellite) most of the apparently “random” errors have been reasonably explained.
By dismissing the BFO as a path discrimination criterion, too much weight has then been placed on the BTO. In my studies, it is rather easier to fit the BFO by adjusting the M for, or along, the path. This “compensates” for the altitude of flight as well as errors in the met model.
IEEE Standard Specification Format Guide and Test Procedure for Single-Axis Laser Gyros,IEEE Std 647-1995 1996. as example of use (see annex)
The posed question still stands unanswered. In another interesting philosophical question, can you define “inertial space”?
correction
it is rather easier to fit the BTO by adjusting ….
If BFO is accurate all we need is Arc6 BFO=252.
BFO (if passsive/level) mainly depends on Latitude and the answer is 33 South on Arc6, heading due south, period. That’s the only answer if passive/level, and if 252 is bang on accurate.
If 252 value is off and should have read 256 (or with slight descending into Arc6) then 38 South is probably the passive flight answer.
My thinking anyways.
@TBill
The BFO at the 6th Arc does not only depend on the Latitude and Longitude.
Depending on the speed mode and altitude, the REFE could occur before the 6th Arc at 00:11:00 UTC.
It is possible that there was a reduction in speed and altitude including a significant ROD at 00:11:00 UTC, which would effect the BFO value.
The problem is that 38S does not fit the fuel endurance for a MEFE at 00:17:30 UTC.
@Richard
I feel like we ought to better understand what exactly happened, or could happened, at IGARI re: electrical configs. Seems to me that could buy some extra fuel depending on options.
Math question in my mind, for passive flights, are there certain discrete solutions like 38S/187 deg South hot spot and 34S/180 deg South hot spot, in other words discrete sweet spots, or is it a continuum?
@TBill
There is no hot spot at 38S.
The hot spot at 34S is not just discrete, it it unique.
There is no continuum of hot spots.
@Richard,
Thank you for your patient response.
Yes I know I do not have your latest spreadsheet and look forward to when you do post it.
I added the GDAS Wind calculations to my model several weeks ago. I was playing with my algorithm…and tried a change that resulted in a GSE error of 0.7100 kts over 5 path points.
That is too good…
I tried to determine how you handled the Lat/lon interpolation from your description in your paper “Blowin’ in the Wind” to see where I may have screwed up.
Let us take for example the UWND value at the 19:40 point.
I retrieve 4 values a,b,c,d : a @ Lat,Lon, b @ Lat+1,Lon c @ Lat+1,Lon+1 and d @ Lat,Lon+1
I first implemented a simple linear interpolation over the grid of values a,b,c,d as UWND = dLon*(dLat*((d-a)-(c-b))+(d-a))+a where dLat = mod(lat,1) and dLon = mod(Lon,1). Repeat the same calculation for the Lat/Lon on the next NOAA level and then interpolate by dheight. Repeat the whole thing for UTC+3 interpolate by dUTC.
Results were in line with what you have posted…but having too much time on my hands I fiddled with the algorithm.
Reasoning that since the GDAS wind prediction value was the average value for the one degree cell…it could be viewed as representing the value at the center of the cell. On a whim I added 0.5 to dLat and dLon got the too-good-to-be-true result.
This is not an Eureka moment…it is a befuddlement moment. (fiddled and became fuddled…I can see a another verse coming from you here…)
We disagree on BTOR and GSE and it may a difference in definition or interpretation.
Here is some data from my model:
FL257.1
Mach is 0.736
SAT (aka OAT) calculated from GDAS TEMP
CAS is 316.9 falling to 310.4 at 19:37.
UTC LAT,LON HDG ALT SAT °C BTO Pred BTO dBTO TAS TAS+WND dX/dT dGS
19:41:03 -1.2430,93.5829 188.18 27041 -18.6 11500 11500 0.1 457.7 471.3 471.3 0.0
20:41:05 -8.9217,92.4695 188.27 27064 -19.8 11740 11737 -2.7 456.6 466.1 466.1 0.1
21:41:27 -16.8699,91.2652 188.54 27101 -18.0 12780 12771 -9.4 458.2 481.0 479.9 1.0
22:41:22 -25.0000,89.9213 189.02 27019 -22.4 14540 14521 -18.7 454.3 494.0 494.9 -1.0
00:11:00 -36.5021,87.6603 190.19 26742 -27.9 18040 18008 -32.1 449.3 489.0 488.9 0.1
00:19:29 -38.1475,87.2842 190.41 26614 -29.0 18380 18346 -34.1 448.3
00:19:37 -38.3291,87.2416 190.44 26614 -29.0 18380 18346 -34.4 448.3
GSE = sqrt(sumsq(dGS)/counta(dGS)) = 0.71 knots RMS
BTOR = sqrt(sumsq(dBTO)/counta(dBTO)) = 23.4 us RMS
Here is a link to a plot of ALT, TAS, GS[TAS+WND], GS[dLat,dLon] for the whole flight.
https://drive.google.com/file/d/1lymNqJvnu7vAUrrSLeKau-1H3qoBZWS9/view?usp=sharing
I need to document my spreadsheet…I am willing to share it but as you are busy getting your next paper ready to publish you particularly don’t want to be trying to perform a vulcan mind meld and figure out what the Hell I was doing.
Regards…
@Geroge Tilton
There are many ways to skin a cat
And I am not saying you have to do it like that
The in thing is to do interpolation
But I am inclined to extrapolation
We all know when the cat is away
That the mice come out to play
The tune sounds fine to my ear
It is what we call quadrilinear
Apologies Geroge Tilton! I meant George Tilton.
@ George Tilton
Your graph shows parameters for the entire flight, but most of the current discussion addresses an assumed starting point and time near to ISBIX and 19:41. What is the approach to connecting the pre-FMT path with the later portion of the flight?
@Richard
40 years ago my wife baked me a birthday cake and spelled it the same way…
I was not about to try the Bicubic macro DrB mentioned in his GDAS sheet notes.
I have a BFO error of 8.17Hz at 19:41 which could be a 354 fpm climb…
If it is a climb, then the BFOR is 2.99 Hz RMS…
The winds make the ground speed 40 knots faster than the TAS after 21:41, would not a 9% speed assist change the MEFE?
Why near Vmo at 27000 feet? I wonder if it is operating on one engine…but my fuel model is too primitive to answer that question.
Regards
@Sid Bennett
Hi Sid,
It is not an assumed starting point per se. I have a loose constraint in my model…the aircraft must be able to fly from the LKP (18:22) to the 19:41 crossing point in 1:19 minutes without violating the laws of physics.
The speed at 18:28 was TAS 484 kns and GS 494 kns. The speed at 19:41 was 457 kns and GS 471 kns. This sets upper limits on distance between 18:28 and 18:40 and between 18:40 and 19:41. Heron’s formula gives us a Lat/Lon where 18:40 might be. Calculating TAS and adding winds I get GS for the two segments which I compare to the GS used to set the distances. Minimising the GS errors sets the speed between 18:28 and 18:40 as 463.1 kns. The Lat/Lon of 18:40 is 6.7107,94.3439. I used the ACARS position reports to regression test my model. As you can see there is excellent agreement between GS[TAS+WND] and GS[dLat/dLon] for most of the flight..from wheels up to splash.
@ George Tilton
Thanks for the details. I am off to some culture right now but will study it in the morning.
Best,
Sid
@Sid
Where is Gary Larson when you need him? I envision a 2020 carton with MH370 analysts gathered together with a spreadsheet in one hand and a drink in the other under an appropriate banner.
@George Tilton
You stated “We disagree on BTOR and GSE and it may (be) a difference in definition or interpretation”.
Unfortunately my model aligns perfectly with the independent flight models from @DrB and Victor, having completed a joint test program comparing results for a number of test cases.
So you disagree with @DrB, Victor and myself.
@George Tilton
@Richard
“The winds make the ground speed 40 knots faster than the TAS after 21:41, would not a 9% speed assist change the MEFE?”
I am looking for the best 38 South path, but I do not see how ground speed is faster than airspeed below 22 South because the winds are mightly strong from the west. I realize the winds are not as strong at lower altitude but still the same trend.
In general I would say BFO for Arcs 3,4,5 point to 38 South, whereas Arc6 points to 34 South. Arc2, as you say, some maneuver seems to be resolving itself. Arc6 we could argue BFO is a weak point in favor of 34 South, so that votes for 38 South. However, if Richard says the best 38 South path misses on BTO, that is a key finding. I am less concerned about fuel at the moment.
@DennisW
I really did mean culture. I am in Lenox, MA and finishing up a lovely stay in the Berkshires and doing a Tanglewood weekend. But, I expect your concept of a meeting of the “minds” would look just as you have envisaged.
@George Tilton
I put a pin in GE at your turn location, and it lies on the GCP between IGOGU and ISBIX, which implies a 186T path. However, I appreciate that a scenario could be proposed where the BFO at 18:40 could be explained by a descent at that time, with the FMT being at a slightly different time. It might account for the observed effects (assuming the other parameters such as ground speed can be rationalized.
When you show the ground speeds for your proposed path, what M profile does it correspond to?
@TBill
Why look for the best 38 South path? I have never presumed that the intersection with the 6th arc was known. Rather, the best fit to ALL of the observed data, with the minimum number of assumed path alterations (including M and alt), is the most appealing.
@Sid Bennett
“Why look for the best 38 South path?”
Although I prefer active-pilot, the 38 South path is potentially the best fit to the data. It’s obvious great fit to data, and explains why so much search effort was there at first. Also there are many 38-South believers still to this day.
So we need to understand if 38-South is fatally flawed for some BTO/BFO reason. Because I can envision possible ways to save fuel, I do not want to rule out 38 South on fuel grounds. If that’s where BTO/BFO say the plane went, maybe I need to reconsider.
If the BTO/BFO refute 38-South, to me it could be proof of active pilot. But also 180_South is a possibility.
@TBill
If you mean 37.5, then I am in your camp.
I accept that my specific M does not yield the “best solution” in Richard’s formulation, but the difference is slight and can be overcome by a very slight adjustment in the single value of M that I use for the entire path.
The most significant difference between Barry’s model and Richard’s model is the met data and the interpolation of such data. I also use slightly different corrections to the BFO based on a different assumed bias and a slightly different eclipse effect. We agree well enough with respect to the BFO data. As mentioned, the BTO data can be brought within the error bounds by a minor change in M.
As to the interaction between the met data and M, what we are really interested in is the ground speed along the path and as this is arrived at by a using a combination of M, the presumed FL and the met data, there should be a substantial equivalent result in both models.
I have found that the most significant obstacle to each solution is the postulation of a simple connection between the pre- and post-FMT paths.
The biggest difficulty with our current discussions is trying to confidently suggest that there is a hot spot in the area already searched, since it appears to denigrate the results of the previous searches. It would be easy (read: more politic)to assert that the reason for the failure of the searches is that a glide occurred, but the jury is still out on the issue and perhaps it is only by searching that this point will be resolved…so we have a circular reasoning problem.
@Sid Bennett
Yes agreed I am saying anywhere 185-188 deg South, does it not work best?
I tend to refer to Yap FF spreadsheet he is also at 37.5 I believe, but I do not know if his (old IG) path is valid from updated model persepective.
The question is not, is there a problem with Yap FF path? Four years ago he did the best he could, but we have since moved on with better accuracy. Presumably we could improve YAP FF path. The big queston is, does the concept still work, perhaps with tweaking needed to fix it? Or is there a big flaw that means it is not so good anymore?
@Sid Bennett
The other perception I have from working the data, the passive flight solution seems to want to be 34-38 South…not much flex to the East unless BFO data has more error that we think or, of course, active pilot or non-standard behavior of the straight path.
@Victor, @DrB,
I have written up my analysis of the MH16 BFO validation flight.
The key findings are:
(1) The standard deviation BFOR is 3.71 Hz and within the limit of 4.0 Hz applied by us in our MH370 flight modelling.
(2) The peak to peak value of ± 7.36 Hz is close to the value adopted by Inmarsat of ± 7.0 Hz. It is important to note, that the peak value only occurred during a turn.
(3) The BFO slope is 0.3272 Hz /hour, which would give around 16 Hz offset after 49 hours. This value is close to the 48 hour re-calibration limit of 16 Hz, experienced in practice in operations.
The short paper is at the following link:
https://www.dropbox.com/s/zkcwpg6znyuzshy/MH16%20Kuala%20Lumpur%20to%20Amsterdam%207th%20March%202014%20BFO%20Analysis.pdf?dl=0
An Excel with the data and calculations used is at the following link:
https://www.dropbox.com/s/2rtbnacon7wbkd3/MH16%20Flight%20Path%20Model%20V19.8%20RG%20LNAV%20KUL%20AMS%207th%20March%202014.xlsx?dl=0
@Richard: That’s an interesting paper, but I have some questions. You say, “Using a BFO Offset of 150 Hz, the mean BFOR was -27.15 Hz.” How did you arrive at that? Did you actually do your own BFO calculations, which would require satellite data and also EAFC+δfsat data for the subject flight?
@Richard
Interesting, thank you for sharing. A first question I would like to ask: in the results part you wrote:
“The BFOR increased from -0.5 Hz
to +0.9 Hz during the flight”
Could you please explain how you arrived at the -0.5 and +0.9 Hz?
@Victor
The DSTG data can be used to define the flight path for MH16, just as the ACARS data was used to define the flight path for MH371. We are given position, time, altitude, speed and heading. You can soon see which waypoints were in the flight plan and we know the GDAS weather data for the flight path.
The Inmarsat data gives the actual BFO value and the time of that data point.
The predicted BFO value can then be calculated from the satellite and aircraft data for the time of each actual BFO data point and compared with the actual BFO value at that time. The time value connects the Inmarsat and DSTG data.
MH16 was flying at the same time as MH370 and connected to the same satellite. I transformed the EAFC and Eclipse data in time from MH370 over to MH16.
The AES Compensation Doppler, Aircraft Satellite Uplink Doppler and Satellite Perth Downlink Doppler were all calculated in the usual way from the satellite and aircraft data.
The mean BFOR for the Inmarsat data points, assuming an BFO Offset of 150 Hz was 27.1511 Hz. I simply added this 27.1511 Hz to the BFO Offset to make the mean BFOR 0 Hz. It just made the graphic in Fig. 4 easier.
@Niels
The BFO slope comes from the linear trend line in Fig.4.
@Richard: Cool! I didn’t realize that MH16 flew at the same time as MH370 and was logged into the same satellite (IOR).
@Richard,
Excellent! Like Victor, I never realized that other flight was contemporaneous with MH370. You have confirmed that the BFO data during the same time period as MH370, and using the same IOR satellite, are a useful route discriminator, being consistent with both the Inmarsat criterion and with the DSTG BFOR PDF. Your results also confirm the general OCXO frequency drift behavior.
In summary, your MH16 results destroy the notion that the BFOs are not useful as a route discriminator.
@Richard
Thanks for the analysis. It addresses some of the important questions re BFO. Regarding the turn at about 17:51, surely the BFO error is more likely due to an offset of about 3 minutes in the registration of the various graphs when digitizing the data. Excising the turn or merely adjusting the registration eliminates the two large peak errors.
Your adjustment of the mean bias seems to indicate that the 150Hz used by Inmarsat for the MH370 case is merely a best fit to the data for that flight.
@George Tilton
You stated “I tried to determine how you handled the Lat/lon interpolation from your description in your paper “Blowin’ in the Wind” to see where I may have screwed up.”
For the interpolation of the GDAS data for the SAT to be used in the TAS calculation, WNDSPD and WNDDIR to be used in the GS calculation and the ∂ISA:SATto be used in the fuel calculation, I use the same quadrilinear methodology, hence the poem. Bobby and Victor use different methodologies, but our results all agree closely, hence there are many ways to skin a cat.
Here is an example extract of a few rows from my Flight Path Tab:
https://www.dropbox.com/s/5f13h37kynrg8br/MH370%20Flight%20Path%20Model%20Example.xlsx?dl=0
If you take the GDAS SAT Interpolation for example, it starts in column R:
(1) In column R I find round down Lat, round down Lon, round down Alt and round down Time.
(2 In column S the same for Lat+1.
(3)In column T Is the interpolation in ∂Lat.
(4) In column U to W is the same for Alt+1.
(5) In column X to Z is the same for Lon+1.
(6) In column AA to AC is the same for Lon+1, Alt+1.
So far all is interpolated for ∂Lat.
(7) In column AD I interpolate for ∂Lon, Alt.
(8) In column AE I interpolate for ∂Lon, Alt+1.
(9) In column AF I interpolate for ∂Alt.
So far all is at round down Time.
(10) In column AG to AU, everything in (1) to (9) is repeated at Time+1.
Finally
(11) In column AV I interpolate for ∂Time.
I hope this makes sense.
Richard,
Here’s a link to a report I wrote well over a year ago on MH16, arriving at a similar conclusion.
https://docs.google.com/document/d/1WtTqG4n_NX1IlkQo_peyJ6Lt7WTIrlcnz7WyzGDkTz0/edit
About 5 months ago I added a section comparing the heading, track, wind, and timing information, which might be of interest to some.
Five MAS 777’s were active in Malaysian airspace during the hour prior to, and hour following, 9M-MRO’s departure. These five were operating the MAS149, MAS088, MAS006, MAS016, and MAS030 services. The SATCOM/GES metadata is archived, but unreleased.
Yes Don. And MAS controls the release, not Inmarsat. Good luck with that one. Guess we could try.
@sk999
In your paper you write: “The one counter-example of well-behaved BFOs provided by the DSTG (The Mumbai-KL flight, Fig 5.4) is clearly an outlier. The biggest excursions happen around 22:20, when the flight makes a turn at MEKAR, departs airway N571, and heads straight to KL. Unfortunately we do not have the raw BFO data for this flight, so replication of the DSTG results is not possible”
Would you have the route data for that flight?
Niels,
I have nothing that you don’t. In this case, it is Fig 9.3 in the DSTG book.
Curiously, if one computes BFOs assuming that the flight exactly followed N571, i.e. turning towards VAMPI instead of going direct to GUNIP, the pattern of BFO residuals sort of matches what is seen in Fig 5.4.. Not saying that the DSTG did that, but without having access to the data and their calculations, we can only make guesses.
@Richard,
“I hope this makes sense”
Thanks,
I am sure it will after I get some sleep…
Yesterday my wife had to go to the ER after having gone off her meds against the advice of her psychiatrist. 24 hours without sleep and I have a bit of a brain fog.
@sk999: In your paper on MH16, you said: The DSTG apparently restricted itself to the ACARS position reports, which are recorded at 5 minute intervals. Since the aircraft can maneuver within that interval and not be recorded, errors can be introduced into the BFO calculation.
In a previous comment listing reasons for higher BFO errors on turns, I proposed four possibilities, including:
3) Due to turns, the expected BFOs computed by DSTG are not using the actual track experienced at the time of measured BFO, which produces larger errors when comparing the expected and measured BFO values.
Since you compute smaller BFO errors for MH16 using your own reconstruction of the path, it appears you believe this is the cause of the higher BFO errors during turns.
That sounds quite reasonable.
@George Tilton: I hope your wife is back on her meds and doing well.
@Sid Bennett
Sorry what is M profile? I have had little sleep over the past week culminating with sitting a 24 hour vigil while Dr’s were Dxing my spouse.
M=Mach? Brain fog here…
Mach 0.82 and FL350 until sometime after 18:28 when MH370 descends to FL257.1 and Mach 0.736.
I have heading 185.45 leaving 18:39:55 where you have 186T…so we are looking at the same path.
I see a BFO residual of 8 Hz at 19:41 that implies a ROC of 353 fpm…if it is not measurement error. Step climbs by MH371 were 399 fpm at 03:49 UTC and 379 fpm at 04:24 UTC so that may be what is going on… If it is a climb would that be proof of active pilot from FMT until at least 19:41?
Are we seeing the results of a blown engine and settling to FL257 because of the loss of thrust. Can MH370 make it to 38S on one engine? (likely no..)
Or is it a broken racetrack holding pattern…I know some of these scenarios have been discussed…
Victor,
“Due to turns, the expected BFOs computed by DSTG …” I’ll broaden that to include Inmarsat. Yes, if all you have are position reports every 5 minutes and the plane makes a turn at some point, you don’t know when that happened within the 5 minutes, so the computation of BFO during that time interval could easily be in error.
For MH16, what I did was assume that the plane flew precisely along airway P628 at a specified Mach and flight level, in which case the time of every turn is known subject only to the unknown start time of the flight. I combined 4 heading changes plus the BFO jumps during the initial stages of the flight (up to IGREX) to pin down the start time, and it worked. So I ended up with a low rms (2.2 hz) for the BFOR and no discernable evidence for turns thereafter.
I doubt either the DSTG or Inmarsat went to the maniacal levels that I did to beat down the BFOR. Note that I tried to do the same analysis for MH371, but the route through China (replete with airway offsets) was too complicated to figure out.
@Victor
Thanks,
On the 1st ER visit 2 wks ago the Dr put her on the same dosage she had stopped 7 months ago. Stopping and starting must be monitored by a psychiatrist. We could not get an appointment for one until mid Sept.
Around 2 AM they decided she could not come home and should be admitted for at least 3-7 days and monitored while dosage gets dialed-in. They started calling around to find a facility with a bed. At 7AM Frederickburg called back and said they could help her. By 9 we had her enroute and I came home and crashed.
@George Tilton
I wish your wife and you all the best.
@sk999
Thanks, good to know we already have some more info on the March 2nd flight. The best is if we could do the calculations by ourselves; I’ll go after the BFO data; if we have to make a choice I guess this flight is one of the more interesting ones for detailed check.
@sk599
You stated “Here’s a link to a report I wrote well over a year ago on MH16, arriving at a similar conclusion.”
Many thanks for your report, which supports the findings in my paper.
My apologies! I missed your report, when you first published it.
I agree that the DSTG used the ACARS data, which is normally available every 5 minutes for the flight route. I disagree that we do not know what was going on in between each ACARS message. It is clear that once a flight is in the cruise, it is generally following a flight plan consisting of flight routes and waypoints. When the ACARS data matches a flight route and waypoints, then we can be fairly sure what was going on in between each ACARS message. Sometimes a pilot has permission to go direct to a subsequent waypoint, but even that can be picked up, if the go direct portion is covered by an ACARS message i.e. lasts longer then 5 minutes. Sometimes a pilot has permission to change the flight route to avoid bad weather, but the GDAS and other weather data shows us, where bad weather is expected and the diversion usually also last longer than 5 minutes. For example, in the MH16 flight, I found a go direct to GIVAL at waypoint SUKAT and another go direct to IBANI at waypoint OPONI.
It is clear that we need the SITA datasets and flight plans for the previous 9M-MRO and sister aircraft flights, which contain the SU logs, from which we can derive the ACARS reports, from which we can reconstruct the flight accurately. The SU logs also contain the BTO and BFO data both on the ground and in the air. Numerous attempts have been made by various people to request this data. So far the ATSB and DSTG have always re-directed the requests to the Malaysians and the Malaysians have not answered. This would give us a much more complete insight into the BTO and BFO data.
@Niels
Further to your MH370 Flight Path Case C using the waypoints AGEGA – ISBIX – BEBIM – EKUTA, you suggested using a variable Flight Level schedule instead of a fixed FL335.3.
You stated “What I notice in your sheet is the rather high 19:41 BFO error, and the rather high BTO errors from 20:41 onwards. ”
You suggested starting at FL270, at 20:01 UTC moving to FL300, at 20:21 UTC moving to FL320, at 20:41 UTC moving to FL330 and finally at 21:11 UTC moving to FL335.3. I have altered the LRC schedule to fit the changes in Flight Level.
I have now run this Case C variant through my flight model and it does indeed solve the high BFO and BTO errors you noticed previously.
https://www.dropbox.com/s/qmel9mg8u69zey6/MH370%20Flight%20Path%20Model%20V19.8%20RG%20LNAV%20LRC%20FL%20Variable%20Waypoints%20Niels%20Case%20C%2011082019%20Full%20Report.png?dl=0
The standard deviation BTOR has increased slightly from 49.5 µs to 49.9 µs (nominal < 50 µs), but the RMS BFOR has reduced significantly from 86.8 µs to 46.1 µs. The standard deviation BFOR has reduced from 2.81 Hz to 1.74 Hz and in particular the high BFOR at 19:41 UTC has reduced from -7.52 Hz to -4.71 Hz (new nominal < 4.8 Hz). The PDA has come down to be within the nominal range from 1.6211% to 1.3737% (nominal < 1.5%). The RMS GSE is still high at 2.89 knots (nominal < 1.5 knots), but in general I think you have possibly found a candidate region of interest (ROI) or a flight path close to a ROI.
@Richard
Many thanks; this indeed looks like an interesting result. Some of the individual BTO errors seem to be a bit high as reflected in the RMS error. It is important to note that the FLs were based on the calculated GS curve for case C. Later today I’ll try to share a summary of those calculations.
@Niels, @Richard: By allowing changes in altitude at various times, you are increasing the number of degrees of freedom, which by definition will reduce error residuals. By allowing these timed, additional inputs, I think it will be difficult to choose among multiple paths.
On a practical note, I can’t think of a reason for a pilot to start at LRC speed at FL270 at 20:01 and progressively increase the flight level to FL335.3 at 21:11.
@Richard
Thank you Richard.
I just finished my morning coffee and downloaded the Flight Model Example you gave me.
You said “it starts in column R”. The columns don’t match the description and there are no equations, just data…
You sly dog…you are forcing me to actually study this and not simply skim over it, making me learn something in the process.
A good teaching technique…
I accept the challenge and will get back to you when I finish…
Regards,
George
@George Tilton
I am not a dog. I am a mouse, but only in poems!
The formulae would be meaningless, without the whole spreadsheet.
You stated “I am not a script monkey and refuse to copy somebody else’s work without taking it apart and understanding it enough to know it is bug free and can rewrite it myself.”
So now we know you are not a monkey.
The formulae are all something like OFFSET( base, index, row).
Please understand that I am unwilling to publish my current flight model before publication of our next paper.
@Victor
I agree a scenario with multiple quick changes in flight level is unrealistic.
Niels Case C variant was what you would call a ‘thought model’.
@Richard
@DrB
Pls remind me how you are handling 23:14 sat call in the new model.
Believe that does tend to support 180 South or further east, vs. 187 South, assuming bias is same as the other channel.
@TBill: I don’t understand how anybody can use the 23:14 BFO data to discriminate paths after 19:41, as we don’t know a priori what the channel offset is, if any. What you can do is calculate what the channel offset would be for a given hypothetical path after 19:41, and then apply that same offset to the BFO data at 18:40.
@TBill
You had asked about Yap’s model and I hope that Yap will comment. \
I still am using Barry’s model which leads to a similar result for the whole path from 18:22. My take on the current state of affairs is that after the failure of the search program, various individuals have tried, individually and collectively to conduct a broader search, including additional insights into the Inmarsat data and the DSTG report so as to increase the confidence in any new recommendations.
In the process, some new paths have shown promise and continue to lead to new insights. I agree, however, with Victor’s comment that the more speed and height changes permit a closer fit to the data, but there is no apparent reason for such changes.
I note that the Amsterdam flight has a nearly constant M of 0.818 or so.
Question to group. Is a LRC model consistent with flying a route defined by waypoints? It would seem to me that the protocol for most flying via waypoints or track systems presumes that all of the planes on a track fly the same M so as to maintain separation.
EKUTA appeals to me rather than SP as a waypoint as it is a “standard” type and there is no ambiguity in the location for a software system, whereas SP has potential logical and computational problems.
@Sid Bennett
When you ask google what the abbreviation SP means, there are 231 possibilities.
In this context, I assume it means Sid’s Path.
@TBill
You asked “@Richard @DrB Pls remind me how you are handling 23:14 sat call in the new model.”
In my case, I am not handling it at all.
@Richard,
SP, South Pole?
@Don Thompson
You are right! South Pole is on the list:
[VI: I have redacted a long list of words abbreviated by “SP”.]
@VictorI, Richard
What I proposed as a first refinement was based on the calculated GS curve, see figure 5 in my paper
https://www.dropbox.com/s/mzclfjn5knhqb7b/WGS84_LRC_TT_report_v1_5.pdf?dl=0
I read out the GS at 19:51, 20:11, 20:31, 20:51, 21:11 and estimated the LRC FL for a 20 minute interval around those points in time. To estimate FL I assumed 200 ton weight, and TAS = GS
I combined and solved for FL at each of those points:
c = 38.968 SQRT (T)
M = 1.23e-03FL + 0.39
T = 288.15+dT-1.9812*FL/10
TAS = GS = M * c
With dT = 10 K I got a good compatibility with FL 335 at 21:11 –
19:51 FL 270
20:11 FL 300
20:31 FL 320
20:51 FL 330
Now, for fixed starting latitude I’m pretty sure we can get to a similar result for example just by one FL change (stay at FL270 for longer time, go to FL335 some time before 21:11). Then stay at FL335 all the way towards 00:19.
Another option (which I already discussed with Richard), would be to vary the starting latitude. I expect that a reasonable fit can be obtained for fixed FL335 al the way from 19:41 onwards (at the cost though of a higher BFO error at 19:41). As a first refinement I would estimate a starting latitude around 2.76N.
@George Tilton
I wish your wife a speedy recovery…
I keep a constant M (about 0.82) and altitude (35Kft) with the turn to 186 at 18:40 at IGOGU. This is a path with minimal assumptions and only manipulating the M “globally”.
Why do we have to presume that a) there was a live pilot after 18:22?; or b) the live pilot was fidgety and kept fooling around with the flight parameters: to what end?
One scenario ends the pilot contribution at 18:23. If there was an offset, just after power was restored, it needed a pilot input. Re-setting the power configuration likewise required a person to do it. The remainder of the flight can be done by entered waypoints. (We have enough suggested waypoints by now….) This scenario leads to a un-piloted end of flight.
I am really looking forward to Richard’s paper.
@Sid Bennett
Thanks to Don, I now know you are not talking about a Special Purpose waypoint, but the South Pole.
Please explain why a Flight Management Computer (FMC) in a Boeing 777 (B777) would have a problem to work out where the South Pole (SP) is.
You stated “EKUTA appeals to me rather than SP as a waypoint as it is a “standard” type and there is no ambiguity in the location for a software system, whereas SP has potential logical and computational problems.”
What are the logical and computational problems, that you are now raising as an objection to the possible MH370 Flight Path LNAV180 LRC FL390, which happens to pass close to waypoint BEDAX at the outset?
@Victor
@Richard
Re: 23:14 I accept your comments, the 23:14 is not too useful as a final path direction indicator. Would an archive 9M-MRO flight with a SAT call help us to calibrate that channel for MH370?
@Victor
Assuming a typical BFO drift/decay per above for MH16, could you develop a short table of MH370 normalized BFOs? Or at least give me hint how many units over the flight, and what the sign is?
>>I am trying to grasp if the normal expected BFO decay per above shifts us a little more to the East or a little more to the West? I estimate that is ballpark 1 deg distance delta per 1 BFO unit decay at Arc6…not sure.
@Don
If you try to request some other flight data, MH88 might be of interest? I am thinking that flight went (probably thru IGARI) and maybe made one of the radio distress calls.
@TBill
You asked “@Richard @DrB, Pls remind me how you are handling 23:14 sat call in the new model.”
Like Richard, I am not using it to fit any route, for the reason given previously by me and by Victor. I do note that the channel offset required to make the 23:14 phone call BFOs match the BEDAX LNAV 180 route is quite reasonable.
@Sid Bennett said: EKUTA appeals to me rather than SP as a waypoint as it is a “standard” type and there is no ambiguity in the location for a software system, whereas SP has potential logical and computational problems.
@Richard asked: What are the logical and computational problems, that you are now raising as an objection to the possible MH370 Flight Path LNAV180 LRC FL390, which happens to pass close to waypoint BEDAX at the outset?
There are no logical nor any computational problems with selecting South Pole as a future waypoint in a route. It is easily entered into the FMC as S90EXXX, and will generate a leg that is along the longitude of the preceding waypoint. It can be easily entered by memory, and if the desire was to crash the plane as far south in the SIO as possible, it is the best choice.
@Sid Bennett asked: Is a LRC model consistent with flying a route defined by waypoints? It would seem to me that the protocol for most flying via waypoints or track systems presumes that all of the planes on a track fly the same M so as to maintain separation.
The most common speed mode is ECON with a company value for CI. In oceanic regions outside of radar range, constant Mach number is more common in order to provide constant lateral spacing.
@Niels: I’m sorry, but I lost the thread. You are assuming constant weight in LRC mode, and TAS=GS?
Inherently, the models used by Bobby, Richard, Barry M, me, and others are built around navigation modes and meteorological conditions, and then the inputs to the navigational modes are adjusted to find suitable paths that statistically match the satellite data. In your method, you generate paths from the satellite data, and then adjust those paths (by changing initial conditions and providing other inputs) to match the navigation mode. It is possible to make the two methods converge, at least approximately, but it takes some effort.
@TBill
You asked “@Richard I’d be interested in your critique of the older IG 186 deg path by Yap FF. It seems to have quite good BTO/BFO fit but I am not good at judging BTO fit.”
Thank you for asking, as I have great respect for the work of Yap Fook Fah.
Yap set out to determine the best fit MH370 Autopilot Flight Path from the BFO data in his paper entitled “Autopilot Flight Path BFO Error Analysis” dated 24th March 2015. In this respect, Yap was ahead of his time.
He presents 2 results which minimise the RMS BFOR:
(1) A Rhumb Line path ending at 37.54°S 89.08°E with a minimum RMS BFOR of 0.53 Hz.
(2) A Geodesic path ending at 37.91°S 88.44°E with a minimum RMS BFOR of 0.57 Hz.
I have chosen to model the second option as I believe a LNAV Great Circle Geodesic is more likely in Autopilot mode, where one or more waypoints would be entered into the system. Yap points out, that his flight path passes close to waypoints IGOGU, ANOKO and ISBIX, so he was certainly aware of the likelihood that waypoints were selected.
Yap does not define a start time and start point, because like us he did not want to put such constraints on his solution. Yap does show a SkyVector by extending his path backwards. I used his SkyVector start point of 072545N0943547E and assumed a start time of 18:40 UTC. Yap does not define the Altitude, so I have simply assumed a FL350. The speed mode is also not defined, but a Constant Mach 0.834030 fits his end point of 37.91°S 88.44°E. Taking all of these assumptions on my part into account, I may not be properly reflecting what Yap was intending to convey. Yap’s goal was to find the minimum BFOR. I am actually happy if the standard deviation BFOR is less than 4.8 Hz and I do not expect a standard deviation BFOR close to zero.
I have now emulated Yap’s flight path in my flight model:
https://www.dropbox.com/s/swy0dihhughjzwq/MH370%20Flight%20Path%20Model%20V19.8%20RG%20LNAV%20CM%200.8340%20FL350%20186.7656%20Yap%20Full%20Report.png?dl=0
The standard deviation BTOR is 28.3 µs (nominal < 50 µs). The standard deviation BFOR is 4.76 Hz and in particular the BFOR at 19:41 UTC is high at -8.51 Hz (new nominal < 4.8 Hz). The high BFOR at 19:41 UTC could simply be because of the assumptions I made about start time and start position. The other BFOR values are particularly low. The PDA is high at 2.27% (nominal < 1.5%), but Yap did not track fuel consumption, nor specify a speed mode. The RMS GSE is high at 3.24 knots (nominal < 1.5 knots).
I am sure that Yap now, with the benefit of 4.5 years further research and analysis, would have more to say on the approach he took and the conclusions he made.
@VictorI
In my case C calculations (paper) I take into account wind as well as weight changes. Richard applied this case to the “nearby track” ..-ISBIX – BEBIM – EKUTA, and used “my” 19:41 position and LRC FL335 from case C. This resulted in considerable BTO errors, as could be expected, as case C has been checked for constant track and LRC constant FL after 21:11, and the speed curve indicates that TAS was considerably lower in the interval 19:41 – 21:11. To improve the fit I suggested Richard two ways:
– account for the lower speed in the 19:41 – 21:11. For this interval, as a first refinement, I indeed estimated FLs under assumption of constant weight (200 ton) and TAS = GS.*
– second way would be to start a bit further north (I estimate about 40 kms)
*I don’t think there is a lot wrong with these assumptions for the purpose / from a pragmatic point of view. For FL300 around the equator we’re speaking about 5 -6 knots difference between GS and TAS, so I could be 10 km or so wrong along track (over an hour). “Morphing” the case C path onto the “waypoint” path anyway introduces similar inaccuracies, so optimizations/iterations are needed anyway.
@Victor
@Sid Bennett
RE: ”The most common speed mode is ECON with a company value for CI. In oceanic regions outside of radar range, constant Mach number is more common in order to provide constant lateral spacing.”
Expanding on Victor’s comment, it depends on the volume of traffic. ATC can require constant M cruise in both radar and oceanic airspace, to ensure the minimum separation is maintained between aircraft at the same level on the same route. If the traffic situation is such that the minimum separation standard is not likely to be a problem, then aircraft are normally free to cruise at the ECON speed for the company’s CI.
@TBill,
MAS088 passed IGARI at 16:33UTC, approximately 50 minutes ahead of 9M-MRO. By the time the MY and VN area controllers realised they’d lost contact with 9M-MRO, MAS088 would have been crossing the Vietnam coast, outbound, towards the VVNB-ZJSA FIR boundary.
@Andrew: Thank you for the correction. How common is it for ATC to require constant Mach during cruise in radar airspace?
@Victor
It really depends on the area. It’s fairly common on some routes around SE and E Asia, less so over the continental US. Outside radar coverage, the Mach number technique is very common in busy oceanic areas such as the North Atlantic (NAT OTS) or North Pacific (PAC-OTS/NOPAC), but not so much over less busy areas such as the Indian Ocean or South Pacific.
@Victor
On a practical note, I can’t think of a reason for a pilot to start at LRC speed at FL270 at 20:01 and progressively increase the flight level to FL335.3 at 21:11.
@Richard
I agree a scenario with multiple quick changes in flight level is unrealistic.
Let’s assume that an actual loss of engine occurred, at some time, for some reason.
The actual reason
and precise time of occurrence can for now, remain a “thought model”.The actual in flight gross weight at the time of occurrence would dictate a drift down to the single engine service ceiling at the gross weight pertaining. Let’s further assume that resulted in FL270 at time “x”..
Some time after reaching and maintaining bottom of descent, with fuel burn continuing to reduce the in flight gross weight, the aircraft eventually regains the capability to be able to drift climb again.
A continuous drift climb of 100 feet per minute effectively accords with maintaining “effective service ceiling”, and both the time frame of 70 minutes (20:01 to 21:11) and the actual level change of 6,530 feet (FL270 to FL335.3) seem to fit.
@Sid Bennett
Question to group. Is a LRC model consistent with flying a route defined by way-points ? It would seem to me that the protocol for most flying via way-points or track systems presumes that all of the planes on a track fly the same M so as to maintain separation. EKUTA appeals to me rather than SP as a way-point as it is a “standard” type and there is no ambiguity in the location for a software system, whereas SP has potential logical and computational problems.
Maintaining constant Mach, or maintaining separation, is not an issue for MH370, when heading “SOUTHISH” for EKUTA, because there is no airway involved, and no traffic. EKUTA is simply an old way-point on an old east-west airway between Perth (Western Australia) and South Africa.
@Richard
It is not the path itself, but the end point 90S. Some nav programs do not function well at exactly the poles. I do not know what “protections” are built in to the specific implementation used in the 777. So, I would rather have a waypoint such as EUKTA that has the same effect: the 180 path.
@Ventus45: If you believe that the disappearance was a deliberate diversion as most of us do, an engine failure along the way seems quite implausible.
@Sid Bennett: Anybody that had the knowledge to program the South Pole as an LNAV waypoint would understand that there was not enough fuel to reach it. On the other hand, reaching an end-of-route places creates uncertainty in the exact path, as the autopilot maintains a constant heading.
@Sid Bennett
RE: ‘I do not know what “protections” are built in to the specific implementation used in the 777.’
As Victor said, it is possible to enter polar waypoints in the B777 FMC. The North Pole may be entered as NPOLE, while the South Pole may be entered as 99SP, S90EXXXXX or S90WXXXXX. There will be a rapid heading/track reversal when (if) the aircraft reaches the polar waypoint, which causes an issue if the autopilot is operating in HDG/TRK SEL or HDG/TRK HOLD. Consequently, the recommended autopilot mode in such cases is LNAV. That’s obviously not a concern in the case of MH370.
@Andrew
Thanks for the info. But entering 99SP then “requires” LNAV as a matter of protocol and training. I would expect the pilot to still fly by the book.
So, I still prefer EUKTA with the same result since it is also beyond the MH370 endurance. Having said that, it must be more appealing to use 99SP…
@Sid Bennett
LNAV is only ‘required’ in cases where the aircraft actually crosses the polar waypoint (or close to it). A pilot could use any lateral mode before that point.
@Niels
You stated “As a first refinement I would estimate a starting latitude around 2.76N.”
I have now run your Case C variant starting at 2.76°N with a constant FL335.3 through my flight model.
https://www.dropbox.com/s/4sdh9czte7jsiwo/MH370%20Flight%20Path%20Model%20V19.8%20RG%20LNAV%20LRC%20FL335.3%20Waypoints%20Niels%20Case%20C%2012082019%20Full%20Report.png?dl=0
This variant gives the lowest RMS BTOR of all your 3 Case C variants at 46.1 µs.
It does not solve the borderline high BFOR at 19:41 UTC of -7.5 Hz, which is only resolved by your flight level change variant, but all flight paths at constant altitude > FL330 show a higher BFOR at 19:41 UTC.
In general, all your 3 Case C variants have a high RMS GSE between 2.87 and 2.89 knots (nominal < 1.5 knots).
Since one explanation of the BFO during the first call at 18:40 UTC is that the aircraft was descending, I could accept a lower flight level followed by a single climb back to a fuel efficient cruise flight level, but why wait until 19:41 UTC?
The flight path proposed by Bobby, Victor and myself (LNAV180 LRC FL390) has a significantly lower standard deviation BTOR (38.3 µs) and RMS BTOR (34.2 µs) than all your Case C variants, a similar standard deviation BFOR, an acceptable PDA and a significantly lower RMS GSE of 1.16 knots, within the nominal range < 1.5 knots.
I conclude all your Case C variants show slightly inferior results compared to the route from waypoint BEDAX to the South Pole.
@Richard
Many thanks again! I will study the results so far in detail and may propose a next iteration. I think the results are encouraging, if we realize that we “morphed” my case C path onto the waypoint path, without many adjustments. For example, for the last variant, qualitatively, we may try to go a bit more north with SP, and slightly increase the FL.
A waypoint route, LRC at constant FL could be flown without pilot input, as you noticed before, so the potential relevance is clear.
Regarding the “single climb back” option (which I would estimate somewhere in the second half of the 19:41 – 20:41 interval for a good fit to the data): possible reasons for lower FL in the 18:40 – 20:41 interval I could think of are
1) avoiding Indonesian radar detection
2) avoiding “crossing” traffic
For the BFOR at 19:41: what would be the value for the LNAV180 LRC390 case? It must be a similar value.
@Niels
The BFOR at 19:41 UTC is the same in our case.
@Niels
Assuming that the reason for heading to waypoint AGEGA was to be discounted as a threat in Malaysian and Indonesian airspace (waypoint AGEGA is just inside Indian airspace), a descent would be required to fit the BFOs at 18:40 UTC.
Assuming the FMT southwards occurred around waypoint AGEGA, then a low altitude would be maintained (as you say) to avoid Indonesian military radar and crossing traffic as I alluded to in the Russian Roulette Paper.
I will try and work out the latest point in time for a climb back to a fuel efficient cruise altitude in order to meet a MEFE at 00:17:30 UTC.
This would then produce a viable scenario connecting the first part of the flight up to 18:25 I UTC with the second part of the flight from 19:41 UTC.
@Richard
Thank you very much for the anaylsis of Yap’s case.
Regarding 19:41 I agree that point has some uncertainty.
Re: yours and @sk999 excellent reports on MH16 BFO drift, I am hung up on implications. Looks to me like increasing BFO Offset say an estimated ~2.5 units (afer 8 hours) due to expected drift implies a possible significant shift to the east for MH370 flight path. That has the dual effect of shifting the sweet spot east but also brings the fuel exhaustion of the 38 South cases into better agreement, because basically it is not 38 South anymore, closer to 36 South. I am thinking, but correct me if wrong.
@Richard
You wrote: “I will try and work out the latest point in time for a climb back to a fuel efficient cruise altitude in order to meet a MEFE at 00:17:30 UTC”
Yes that is interesting to know. The FL before climb back is then an important parameter. You would tune it to fulfil both the path/timing and MEFE constraints?
I have a calculated GS of 432.4 knots at 19:41 in case that helps.
@ Niels
You asked “You would tune it to fulfil both the path/timing and MEFE constraints?”
Of course!
@All
Concerning: Next implicit and ill-justified assumption behind the 34.4 S solution: Solutions north of 20 S are impossible.
As far as I can see the only justification for this assumption is that debris starting exactly at the 7th arc north of 20 S will miss Reunion (and generally not fit well with the rest of the debris beaching pattern) if one ignores the detailed influence of hurricane Gillian. This is indeed true, but ignoring the influence of a strong tropical hurricane passing the area roughly two weeks after the crash is clearly wrong. The only viable argument for ignoring the hurricane is if the debris will miss the hurricane in any case, or only meet it at times or positions where it is too weak to drag the debris along. While this is true exactly at the center of the arc, one does not have to deviate much to the west from this line to find places where it is untrue. The exact distance depends on the latitude. For those latitudes where it is possible to trap debris in the hurricane, it will be in a narrow region (few km wide) located somewhere between 15 km and 70 km to the west. For distances below 40 km, the plane may have crashed in this narrow region without an active pilot.
A simple criterion for evaluating the position and width of the narrow region is that the resulting drag velocity for the debris must match the travel velocity of the hurricane. This matching depends on the shape and buoyancy of each piece of debris, so the hurricane will effectively work as a filter for certain debris.
@Viking
On 28th November 2018, Victor stated “‘@Niels said: In my understanding the raw uncompensated Doppler values are unknown (we only know Fup+fcomp by approximation).’ Yes, this is a fundamental flaw in @Viking’s paper. We only know the “residual Doppler shift”, i.e., the shift that remains after the pre-compensation by the AES. (The other components of the BFO are path independent.) The AES pre-compensation algorithm is well-known, as described in the Inmarsat JON publication, the ATSB publications, and the DSTG Bayesian analysis. Since June 2014, many people on this blog have been fairly accurately calculating the BFO for hypothetical paths. My recommendation is that you (@Viking) consider the full BFO model in your paper (among other things).”
On 28th November 2018, I stated “@Viking Your paper starts off being well presented, but descends into a story built around a cast of thousands. 1. Your route fits the BTO but diverges from the BFO significantly towards the end.”
On 29th November 2019, Victor stated “@Viking: I had a previous comment about your BFO model which you did not comment on. Until you use the proper BFO model that incorporates the Doppler pre-compensation algorithm of the AES, any conclusions you draw that uses the BFO should be viewed with suspicion. The Doppler shift and the BFO do NOT have the same sensitivities to the individual components of the velocity vector.”
On 29th November 2019, I stated “Please find below a link to my MH370 Flight Path Model V17.0 with your route. I have included the wind speed and direction as well as air temperature en route.
In Column T you will see the “Error Calibrated BFO (Hz)” increases steadily to 26.1 Hz as the flight progresses, despite including the “Aircraft Compensation Doppler (Hz)” in column DN and the “EAFC Effect” and “Eclipse Effect” in columns DQ and DR.”
On 3rd December 2018, I posted an analysis of the simulated debris path from your MH370 end point. The result was that the simulated debris was blown around 1° of latitude further south during the Tropical Cyclone Gillian and ends up around 1.8° of latitude further south on the eastern coast of mainland Africa. Simulated debris also took 6 days longer to arrive in Africa because of the Tropical Cyclone Gillian.
On 4th December 2018, Victor stated “@Viking: Is your stance that a path with 26 Hz BFO error is nonetheless acceptable?”
On 5th December 2018, I stated “Regarding your comments on my path model, a BFO Error of 26 Hz is unacceptable. Regarding your comments on my drift model, please note that Tropical Cyclone Gillian passed 80 NM in front of the simulated debris path from your end point.”
On 1st August 2019, I stated above “The BFORs are way off, the standard deviation is 39.64 Hz.”
On 3rd August 2019, I stated above “your BFO calculations are completely wrong.”
Quite clearly, you are oblivious to the fact that:
(1) Your BFO calculations are completely wrong.
(2) Your MH370 end point is completely misaligned to the drift analysis.
@Richard
You have two arguments against solutions north of 20 S. One of these (BFO fit) is specific for my solution. For this issue I can only add these comments:
(1) The best argument for flying this particular route is the option for parachuting out of the plane near Aceh. If this did happen, and the heating system was on, one would expect a BFO shift at the last (worst) point of 13.5 Hz, so the deviation is reduced from 26.1 Hz to 12.6 Hz. If the heating system was off the shift will be 18 Hz, so the deviation is reduced to 8.1 Hz. If one trusts the contrail to come from MH370, the second engine fueled out 5.5 minutes late – perhaps because of energy saving from turning the heating system off before the jump. If the deviation is just 8.1 Hz, I find it entirely acceptable in light of discussions we just had. All intermediate points fit considerably better. Finally, the small weight I put on the BFO means that even a 12.6 Hz deviation is acceptable.
(2) Concerning the hurricane influence on the debris, you seem to forget that the effect is highly resonant. Moving the debris 18 nm west (in agreement with the contrail) will effectively increase the winds by a factor of four. This will shift the debris by more than 4 degrees initially, and probably up to 10 degrees near Africa. Unfortunately I do not have the proper tools to make an accurate simulation, so these numbers come with some uncertainty. However, the resonance effect is a general feature of collision physics.
A splendid example is the very accurate model of atomic collisions developed by Bohr and Lindhardt in 1954 based on the same arguments of velocity resonance. It was not until roughly 10 years ago that full computer simulations became more accurate:
K. Dan. Vid. Sel. Mat. Phys. Medd. 28, 7 (1954)
@viking
Concerning your (1): “The best argument for flying this particular route is the option for parachuting out of the plane near Aceh.
Using BFO effects to support that argument is highly speculative and quite tenuous. Have you nothing stronger to offer?
Concerning your (2): “Concerning the hurricane influence on the debris”
I have a recollection that an oceanographer made the comment that flotsam encountered in the track of a cyclonic storm, will be distributed in every direction, not simply pushed along the path of the storm. Regardless of that comment, where is this “highly resonant” effect described?
Wouldn’t smuggling a parachute on board be somewhat difficult?
@Tom O’Flaherty: That is only part of the complication of a scenario involving jumping. The only survivable exit is out the bulk cargo door. Access to this door requires that some of the cargo in the aft hold was not loaded at KLIA. This means there was collaboration with the cargo handlers on the ground. Given this collaboration, stowing a parachute near the cargo door would be easy. However, we have no evidence this collaboration occurred.
And how do you even access the Bulk cargo in flight?
As far as I know, there’s no hatch that allows that.
@Tim – And how do you even access the Bulk cargo in flight?
I guess you could take a fire-ax and chop your way through the cabin floor.
But somebody might notice that…
Time for DennisW give out another Wacko award…
@Don Thompson
(1) If one assumes that a parachuting attempt took place leaving a door open, and that the heating system was switched off, the BFO values fit nicely with a 7 Hz standard deviation. I find that a strong argument, in particular since the BTO fits exceptionally well (according the Richard to well).
In addition, there is a contrail which is only 4-7 km off from the solution along most of the route. It shows an abrupt direction change and narrowing at 00:08 coinciding almost perfectly with the expected flame out of the first engine. After this the second engine seems to flame out 5.5 minutes too late compared to the fuel consumption model. This could be explained by some energy saving measures (eg. heating off). Finally, there is a faint indication of a spiral. I admit the spiral is unclear, and there is some intermittency in the first part of the contrail, but still what is the probability of such a closely matching contrail with perfect timing and flying speed? And in particular, which airplane would fly in this extremely unusual way? Basically I can only imagine it is MH370 or (with orders of magnitude lower probability) either a decoy plane transmitting false signals to Inmarsat, or some military airplane performing a highly unusual exercise.
(2) Concerning the resonant behavior it is described for the case of fast moving heavy ions capturing electrons from atoms in the reference I gave. Unfortunately all places I could find to download it are behind paywalls. Here you can see the front page (English version) without a paywall:
https://www.abebooks.com/first-edition/Matematisk-fysiske-meddelelser-18-8-Niels-Bohr/22583220525/bd#&gid=1&pid=1
The paper is a true classic in atomic collisions with Niels Bohr (noble price winner) as the first author. Most of the stuff has since found way to textbooks.
I have newer seen it used in the context of oceanic cases before, but I am convinced the same mechanism works, since the model is based entirely on arguments from classical physics (a so called semiclassical model). I agree that if you hit the hurricane outside the narrow region you are likely to experience almost random scattering. The same happens in atomic physics (with a few exceptions related to quantum mechanics).
Sorry for a typo above. The first () should read:
(according to @Richard too well to be true)
@Tom O’Flaherty
There are reports in Australian media that Shah had brought a parachute along in some previous cases. It is illegal (I know), but perhaps he got away with it since he was very senior?
@Victor
I do not know enough about the construction and detailed location of the doors to know if the cargo had to be loaded differently to allow parachuting.
However, it would not surprise me if Shah got some help. The remarks from @TimR indicates that other people knew something.
In addition, I have always wondered about other weird details that may indicate help from others. For instance the timing of the satellite phone calls. First of all, why where there only two attempts (I believe at least one of these consisted of a few tries)? Most people would have tried several times as long as there was indication of a possible connection (exactly as the Chinese family members did). More importantly, the timing of the first call was practically perfect to cause maximum entanglement between the flight route and the non-ideal movement of the satellite. This could be a coincidence, but the second call was timed to there would be a handshake just after the first engine fueled out. This causes a good BTO but potentially a corrupted BFO, but only if the electrical configuration is modified (as it must have been for the C.I. route if we trust the fuel consumption model).
To me this is too good to be a random coincidence.
@Richard,
I am up to column BK…
I added GDAS data to the your Flight Path Model Example sheet.
I had gotten DrB’s “MH370 Weather Data – DrBobbyUlich – 2017.02.07” back in July and installed Microsoft Office 2007 to open it. Office 2003 Excel is limited to 65k rows and the data took 262k rows with separate sheets for each 3 hour time interval. You can only launch Excel ~14 times in trial mode before it disables the menus and goes and off and sulks in the corner.
I put my laptop in standby instead of shutting it down for a week to avoid triggering the self-destruct mode. Also the MS weenies moved all of the menus around so there was a bit of a learning curve…We old fogies don’t take kindly to change…
I added the GDAS weather data to your example sheet and proceeded to work my way through the sheet matching results.
∂Lat, ∂Lon, and ∂Alt…no problem…I prefer to work with decimal Time so ∂Time=MOD(decimalUTC,3) …just my way to skin a cat.
The hPa calculation gave me pause.
You had 196.769 and I got 196.400.
I had used the equation Pa = p0*((T0+h*dTdh0)/T0)^(CgRGas/-dTdh0) and then realized that above 36089 feet that I shouldn’t…my bad.
It is only needed to get the NOAA LEVEL to index the GDAS data.
I was able to duplicate your results perfectly for columns R thru W.
Columns X thru AC were another matter. I could not get them to match no matter what I tried. This morning I discovered ROUND() had two siblings not found in Excel 2003…maybe they were there…I just never noticed.
My disk-drive went bad last year and I took the opportunity to upgrade to Windows 7 and Office-2003 from XP/Office-97…still antediluvian here.
Skipping on…columns AG thru AL went smoothly.
Columns AM thru AR were fussy. Probably the same issue as X thru AC.
We are now at columns AW thru AY.
We match on Mach.
Speed of sound I have 573.57 knots and you have 576.70…I use 216.65°K because we are > 36089 feet.
My TAS is 482.15 kts where you have 484.26 because of the speed of sound difference.
Columns AZ thru BH I get the same results as you.
Columns BI thru BK are like X thru AC and AM thru AR, just not cooperating.
While trying to trouble-shoot the problem I noticed that Z, AC, AO, AR, BH, BK, BW, BZ, CM, CP, DB and DE all interpolate using ∂Lat instead if ∂Lon.
Is there a reason?
Well its off to make sure I am indexing the GDAS data properly and not shooting myself in the foot. on the failures.
Regards,
George
@Tim,
The LLAR module, as fitted to 9M-MRO, included a hatch facing into the aft hold. The aft cargo compartment to bulk cargo hold partition is understood to be a fireproof curtain. If no ULDs were loaded, access is possible.
However, as Victor describes, the load plan records for 9M-MRO, as operating MH370, show that ULDs were to be loaded into the aft cargo compartment.
@Tim asked: And how do you even access the Bulk cargo in flight?
As far as I know, there’s no hatch that allows that.
That’s not correct. We’ve had discussions about this before. For instance, in this comment, I wrote:
After depressurizing the plane below 10,000 ft, the bulk cargo door in the aft cargo bay can be opened, as many have discussed. Access to the aft cargo bay is achievable via the modular crew rest area that was installed in the aft cargo bay. However, according to the loading sheets, access to the bulk cargo door would have been blocked by the Unit Load Devices (ULDs) that were loaded in KLIA.
But can we be sure that the ULDs were actually loaded? If they were not, it would mean that the loading records presented in the Safety Investigation Report (SIR) are false. To date, I have not been able to find any reference to security video recordings of MH370 near the gate. Does anybody know of any?
Would there be other indications if the cargo was not loaded? The CG would be shifted forward, so that when the FO rotated to takeoff, he would have exerted more backward force (more nose up) on the control wheel because the stabilizer trim (which is set based on a value for CG that is input by the crew) would not be correct. That change in backward force might not have been noticeable, especially to a relatively inexperienced PF. The fuel burn would also have been a bit lower, but the difference in onboard fuel at the time of the last ACARS report at 17:07 would have been small.
@Viking said: The remarks from @TimR indicates that other people knew something.
I think @TimR has done a good job telling us what he was told, but I put his information in the bucket of unsubstantiated rumors, of which there have been many.
@George Tilton said: I guess you could take a fire-ax and chop your way through the cabin floor. But somebody might notice that…Time for DennisW give out another Wacko award…
I think what it is time for is for you to review old comments. Access to the bulk cargo door via the crew rest area has been discussed multiple times before. There is no need for chopping through the cabin floor.
@Viking
I’d like to thank you for something. Your paper has confirmed my suspicion that Arxiv can be gamed to publish content that is, at best, mediocre. Something that is barely beyond a story. On the other hand, perhaps my expectation for scientific publication to be rigourous, and fact led, is misplaced.
The answers you have given to many of the questions posed here are fantastic examples of whattaboutery, few are direct responses. An example is the response to Tom O’Flaherty, rather than trying to substantiate a point, you merely attempt pass the notion off as something that is commonly reported in the media.
In response to Victor, above, specious comments are made concerning the SATVOICE calls to disgress and deflect from the confirmation that earlier comments about parachuting from the bulk cargo compartment are tenuous, bordering on baseless.
Apologies for the rant, but I’m out. I’m quite tired of MH370 story tellers, they come ten-a-penny, and most casually ignore facts so as to present a unique or sensational take on the loss of 9M-MRO.
@Victor Iannello:
I previously asked, if any of you have a communication channel with MAS, but seeing Richard voicing similar thoughts, I assume MAS doesn’t talk to us?
@Niels
There has been some discussion on how to connect the flight of MH370 between the last radar point at 18:22:12 UTC and the satellite point at 19:41:03 UTC.
At 18:22:12 UTC, MH370 was on flight route N571 around 10 NM beyond waypoint MEKAR flying at 0.85 Mach, at FL390, on a Track of 296.3125°T at a GS of 507.35 knots, when the aircraft suddenly disappears from the Malaysian military radar.
At 18:25:02 UTC, MH370 reaches waypoint NILAM and the pilot is sure he is out of range of Malaysian military radar. The aircraft turns toward waypoint AGEGA on a Track of 316.796°T and slows to around 420 knots in preparation for a descent. The SDU is rebooted at 18:25:27 UTC. The flight path fits the satellite data between 18:27:04 UTC and 18:28:15 UTC with a BTOR ± 6 µs and a BFOR ± 7 Hz.
At 18:39:53 UTC a SATCOM call to the aircraft is attempted. The pilot maintains the flight path towards waypoint AGEGA, but a descent to FL270 has already been started at a ROD of around 2,700 fpm. The flight path fits the satellite data with a BFOR ± 2.2 Hz during the call.
At 18:49:31 UTC, MH370 reaches waypoint AGEGA and is out of Malaysian airspace, out of range of Indonesian military radar and has just entered the Chennai FIR. The pilot knows that the Indian military radar north of Port Blair in the Andaman Islands is switched off in peace time. MH370 turns southwards toward waypoint BEDAX undetected. The pilot also knows that at FL270 the aircraft will be underneath all other traffic as the aircraft is about to cross 10 busy flight routes.
At 19:19:05 UTC, MH370 reaches waypoint BEDAX and the pilot sets an ultimate waypoint of the South Pole and checks the autothrottle is in Long Range Cruise mode.
At 19:41:03 UTC, unbeknown to the pilot the Perth Ground Station makes a Logon Interrogation via the Inmarsat satellite and the SDU sends a Logon Acknowledge. The flight path fits the satellite data with a BTOR of 8.2 µs and a BFOR at 4.7 Hz.
At 19:44:55 UTC, MH370 reaches the latitude 2°N and the pilot knows that he is now out of range of Indonesian radar, beyond the busy flight routes and can climb back up to FL390.
MH370 runs out of fuel several hours later at 00:17:30 UTC and crashes shortly afterwards at just after 00:19:37 UTC and at around 34.4°S 93.7°E. Ironically, the Indonesian radar was not working that evening, but the pilot did not know.
@Peter Norton: I don’t have any communication channels with MAS. In fact, when I wrote an article pointing out the discrepancies in the ACARS logs, MAS publicly responded that they had provided full cooperation and assistance to all respective authorities on the investigation for MH370, including the submission of relevant documents necessary for the investigation.
Then, a week later, Malaysia’s Ministry of Transport responded by quietly releasing the full ACARS message log for MH370.
So, based on this exchange, I am not optimistic that MAS will be cooperative.
@Richard
I do not have any problem with your proposed flight path to 19:41. You are taking liberty to make ascent maneuver after 19:41 which I also feel something was going on in that 19:30 to 20:00 time frame. That’s why I do not assign too much importance to exactly meeting 19:41 BFO.
Another way to say it, I am thinking Arc3 to Arc5 might be passive, not definite but it seems to work for BTO. Going back to Arc2 is not strictly passive but approx so.
@Richard
Thanks for sharing this scenario. I have two main remarks / worries:
– The 18:27, 18:28 BFORs
– The climb back imo is a bit early. If the avoidance of crossing traffic would be part of the scenario, perhaps one could expect it to extend to the Jakarta traffic (crossing around equator) or the main routes from South India to Australia (crossing around S2-3 degrees).
A suggestion to possibly fix both points: After NILAM stay at or parallel (SLOP) to N571. Descent. Turn south in vicinity (just after?) IGOGU. Then BEDAX, South Pole. Climb back a bit later and more southerly than you proposed.
Not sure though how that works out for the 19:41 BTO.
@Niels
The 18:27/28 BFORs are within the 7Hz peak to peak during a turn.
If you climb back later than 19:46 UTC, then the flight path does not fit the MEFE at 00:17:30 UTC with a PDA of around 1.5%.
I have analysed the traffic for all 21 flight routes that were crossed. There is very little traffic south of 2°N and none at the relevant time MH370 would have crossed the various flight routes.
If you do not go to waypoint AGEGA, then you no longer have a continuous route. Waypoint IGOGU is too far south and you then have to introduce a holding pattern to match up the flight route at 19:41:03 UTC onwards.
A flight path via waypoint AGEGA requires no holding pattern.
@Richard, @Niels: And herein lies a question about the BEDAX-SouthPole path: The timing doesn’t work unless a delay of some kind is introduced before 19:41. That delay could be a north-south or west-east excursion (possibly with a slow-down) or a holding pattern. The excursion could have been part of the deception of a northern path when the destination was to the south, but we really don’t know. This complication is the reason that back in 2014, the paths ending near 38S were preferred. The delay is also the inspiration for some of the more “creative” scenarios involving landings, negotiations, and jumps, all which involve leaps of speculation.
@Victor
A flight path via waypoint AGEGA requires no holding pattern.
There is no artificial delay.
The intent was to get out of radar range before turning and stay low until back out of radar range.
@Richard: Yes, I said that “the excursion could have been part of the deception of a northern path when the destination was to the south”. That’s certainly one possibility. It nonetheless delayed the turn to the south.
@Victor
You are missing my point.
Previous attempts to define a flight path between 18:22:12 UTC and 19:41:03 UTC were not a continuous forward path and had some contrived delay with even more contrived reasons such as negotiations or waiting for a communication or …
My proposed is not a delay per se.
My path is a continuous forward path into Indian airspace without any contrived holding pattern or contrived reasons for the path chosen.
The reason was not deception of a northern path, but the reason was to get beyond radar range and stay out of radar sight whilst turning south and crossing Indonesian Airspace.
That is a huge difference, in my view.
This is the first such path published to my knowledge.
@Richard, VictorI
Is it correct that the typical 19:41 latitude for the FL390 LNAV SP path is around N3 degrees?
Would be the BTO error for a 19:41 latitude around N2, FL say 150 still be acceptable?
So I was thinking about FL much below 270 and keep it there some while after 19:41.
@Richard: I agree that your proposed path is a possibility.
@Victor Iannello: Thank you. That’s too bad. I think with MAS cooperation, the MH370 enigma could have been solved a long time ago. It’s frustrating to solve a problem with insufficient data, when it would get significantly easier with more data.
You pointed out one of your blog articles you wrote. But have you (or anyone else here) ever tried to contact them directly (e.g. by email) and did they ever respond?
@Victor
One of many possible scenarios.
Just to say, I was also speculating about the possibility that MH370 could have avoided Indonesian radar range a few years ago (p. 5-10):
https://www.docdroid.net/GvlrLaV/mh370-waypoint-30.pdf#page=8
Quite a straightforward and logical assumption I think.
@Richard
While the “AGEGA” scenario is a possibility (with some “borderline” BFORs), for the moment I’m persisting on the “IGOGU” option. Some estimates, please correct me if / where I go wrong:
– According to your paper FL390 LRC, LNAV SP path has a 19:41 latitude of N2.99
– 19:41 position of 2.0, 93.78, 5 km altitude gives about 43 microseconds BTO error
– IGOGU-BEDAX-2.0,93.78: 335 nm or 56 min at 360 kts average GS (FL140 – 150 ?)
– You have 1 hour (19:41 – 20:41) to “save” about 110 km by staying low for a while; should be no problem.
@Victor said
“…@Richard, @Niels: And herein lies a question about the BEDAX-SouthPole path: The timing doesn’t work unless a delay of some kind is introduced before 19:41”
I agree.
MH370-Captio has perhaps the best proposed path to 19:41 very similar to Richard’s in principle, except Captio descends adjacent to N571 and turns slanty to MEMAK. Then it goes MEMAK to ISBIX region which makes hard, definite contact with Arc2.
I believe Richard’s path never touches Arc2 in my Google Earth, especially if we say altutude is less than FL300 which moves Arc2 further west. However, going up to AGEGA is a good alternate proposal, perhaps accounting for Indonesia’s statement “we heard it was seen in the Andamans”. Now if we could just get the Country who saw MH370 in the Andamans to fess up.
Personally I assume the simplest statement of the start of the 180S path is:
MEKAR NILAM 0796E 0894E ISBIX
with decent completed before the turn at 0894E.
One problem with the 180 South path is it is very hard to actually touch Arc2
so you have to settle for getting close to Arc2 at 19:41, and assume thpilto did something to get west or data is imperfect by a few +-nm.
@TBill said: One problem with the 180 South path is it is very hard to actually touch Arc2
Having zero BTO error at 19:41 (or at any other time) is not a requirement. The BTO measurements inherently have uncertainty described by a standard deviation of around 29 μs for the R1200 channel.
@TBill
You stated “I believe Richard’s path never touches Arc2 in my Google Earth”.
I presented a possible scenario for discussion showing a MH370 flight path connecting the forward path to the reverse path via waypoint AGEGA and all you can say is that waypoint BEDAX is outside the 2nd Arc and waypoint ISBIX is inside the 2nd Arc. So what? Neither waypoint is on the 2nd Arc, which in any case is not the question. The question is, where was MH370 at 19:41:03 UTC? Victor has given you the answer: On the 2nd Arc ± 29 µs.
I already responded to @Niels “Waypoint IGOGU is too far south and you then have to introduce a holding pattern to match up the flight route at 19:41:03 UTC onwards.”
Your 0894E is a little bit better, but also too far south and you also then have to introduce a holding pattern to match up the flight route at 19:41:03 UTC onwards.
@Victor
@Richard
Going up to AGEGA looks a little like going to DOTEN (AMVUR) in the sim study, so it is interesting proposal.
@Victor
Jumping to a possible conclusion of the flight path mystery, perhaps prematurely.
Potulated, based on many flight sim flights:
The home simulator path was not DOTEN to NZPG, it was 180 South CMH heading fron DOTEN. But the aircraft was moved in the home simulation case. The real life case is 180 South CMH from AGEGA. I am pretty sure 180 CMH (or CTH) may fit to Arc5. After that, either we have active pilot after Arc5 (because CMH will curve and hit Arc6 too early), or he toggled over to 180 CTT or South Pole. I am thinking it is the CMH/active pilot option with descents/etc accounting for slow down after Arc5.
This then ties in the Actual Flight = Approx Simulator Flight. Also the sim cases with zero fuel seem to possibly infer dual fuel exhaustion case with pilot gliding, and FS9 is not so bad I presume for estimating gliding.
@Richard
Re: ‘At 18:49:31 UTC, MH370 reaches waypoint AGEGA and is out of Malaysian airspace, out of range of Indonesian military radar …’
AGEGA is not out of range of the Thomson TRS 2215 R radar operated by Satrad 233 on Sabang. That radar has a 300+ nm instrumented range and is ideally sited atop a 1,500 foot hilltop. A target could be below Satrad 233’s radar horizon at AGEGA but it would need to be below about 20,000 ft.
Re: ‘At 19:19:05 UTC, MH370 reaches waypoint BEDAX …’
Now, here’s the rub. AGEGA – BEDAX comes within 85 mm of Satrad 233. Given the radar’s elevated position a target would need to be below about 2,000 ft coming abeam Sabang to avoid detection. That’s not impossible but it would have to hammer your fuel calculations.
@Mick
I told Victor I was done here, but I cannot resist. There are a number of “rubs” besides yours, and I think Richard, DrB, and Victor are living in a fantasy world.
Victor has expressed the sentiment that if the analytics show a “spike” in the route probabilities that they are likely to be correct. Well we have not seen those analytics, and it is coming up on two months now. Maybe I was not paying attention as Richard is fond of asserting.
I am troubled by the theme for several reasons:
1> It assumes no pilot inputs. That assumption goes back to the early Duncan days, and there is nothing to support it other than “that is the way pilots like to fly airplanes”.
2> The analytics on BFO error are deeply flawed. No one knowledgeable inside or outside the oscillator industry uses Gaussian stats to characterize oscillator performance. Pointing to one or two examples does nothing to raise confidence in that approach. Actual performance truly is a random walk.
3> Proposing to search an area already searched is highly questionable. The probability that the debris field (which should be quite large) was missed is at best 20%.
@DennisW
Let the boys play with their toys while we wait for the inevitable call to come up with possible search areas.
At that stage we can respond with realistic suggestions with supporting evidence for possible destinations to be searched.
If you consider piloted flight as a possibility, which I do, a professional pilot uses waypoints and straight tracks at a steady speed.
Captain Zaharie was a professional pilot, he would have used waypoints and let the plane do the flying.
The previously posted flight path round below Sumatra fits the BTO data from 19:40 through 00:11 with straight tracks at a constant ground speed using waypoints.
He intended to land safely, release the passengers and seek asylum in Australia or Indonesia.
A possibility was disruption on the flight deck before Cocos Islands.
This could have meant there was no turn at Cocos Islands leading to overflight and continuing at a steady 370kts to a ditching further South at around 22°S near the 7th arc.
In summary, from 19:41 onwards the BTO’s fit and MH370 could have ditched in the vicinity of the 7th arc at either around 9°S or 22°S.
@TimR
RE: “He intended to land safely, release the passengers and seek asylum in Australia or Indonesia.”
The problem with that scenario is that hijacking and the taking of hostages are serious crimes, regardless of the political situation. Australia and Indonesia are both signatories to UN treaties that would ensure Zaharie was extradited straight back to Malaysia and/or imprisoned for a very long time.
To my mind ~38S is problematic not only because FUGRO has intensively searched that area (the original ATSB hotspot…) but because virtually all results from drift studies and sealife examination contradict such a southern spot, let alone one that includes a possible glide beyond the seventh arc.
To give just one example:
The barnacles present on the flaperon belonged to the species Lepas (Anatifa) anatifera striata. This sub-species is strictly pelagic, always living on floating objects. It is a cosmopolitan species, widespread in worldwide oceans at tropical and temperate latitudes, in water temperatures above 18-20°C. The size of the biggest specimen indicated that the initial settlement could have occurred 15-16 months prior to the discovery of the flaperon at Reunion Island. … At the beginning of their growth, the [small] barnacles were immersed in waters with a temperature close to 28.5 +/- 1°C. Temperature distribution maps in the months preceding the discovery of the flaperon suggest that it has drifted in waters located East-North East of Reunion Island.
(SIR, p. 396 and App. 2.6A-B)
This implies a probable crash site close to, or north of, Broken Ridge. Otherwise the flaperon could not have reached waters above 18°C within a few months and could not have approached La Réunion from a northeasterly direction in the months before landfall.
The only way to discard these results is to say that they are not necessarily conclusive. They should still be taken into account if one looks into probabilities.
@DennisW
G’day Dennis,
Right off the bat, on the basis that this work is nobody’s day job, I would never be critical of the time taken to publish work. I have been fiddle-farting around with a more detailed analysis of the home sim data for a few months now and that is many orders of magnitude less complicated than what Bobby, Richard and Victor (BRV) have been working on. So, a little slack cut, a little patience exercised or a serve of each maybe?
There is very clearly merit in the BRV approach of synthesising ALL the data into solving the problem. It’s clever. Even if I thought of it I couldn’t even begin to conceive of how to do that. However, I think that it is fairly clear to everybody at this stage that the problem of determining the location of the final ping on the 7th arc is essentially unsolvable based on the information to hand unless a suite of assumptions are made to constrain the problem. The issue is whether the assumptions are reasonable.
I’ve been wrong before so this could be just another tally mark in that column but the issue about the assumptions used this time around (mode of navigation, FMC/autothrottle speed setting, Vertical Navigation/altitude, fuel remaining/consumption) that concerns me most is that they require invoking modes of flight that were almost certainly never in evidence after the aircraft turned back. The aircraft appeared to be either vertically unstable or altitude was varying, the vast majority of the turnback and the flight up the Strait was almost certainly not in LNAV except for maybe the VAMPI – MEKAR leg, and when last tracked by radar the aircraft was almost certainly at around 30,000 feet geometric (not FL350-390). Maybe that was all part of a subterfuge, I don’t know.
I think that like you what I don’t like about the emerging One True Path solution is that it calls into question a previously generally widely held belief about the efficacy of the search. I mean, up until recently we could take some comfort that despite not finding the wreckage field at least we knew where it wasn’t. Now, if we’re dialling up the uncertainty on the previous search, where does that leave us?
I think that the missing piece in interpreting the integrated solutions pointing to 34S-ish is the third possibility:
1) The wreckage is inside the previous search band and was missed (which I would rate as no better than 20%),
2) There was a glide-dive-glide and the aircraft is outside the previous search band (I don’t know, 20%, 25%?), or
3) This demonstrates that THE AIRCRAFT WAS NOT FLOWN IN THAT FASHION (55%?).
I’m a simple soul, so I’m inclined to follow a back to basics path on this these days – where do start looking for something you lost? Where you last saw it. For MH370 that’s the 7th arc. So, frankly, I’d be weighing clearing 25S up to 20S at least equally with rescanning a searched area or expanding the search beyond the 25nm band. But that’s just me.
@DennisW
You stated that you have 3 issues with our approach:
1. ” We assume no pilot inputs.”
That is incorrect. In the last 3 months, I have run 20 possible MH370 flight paths for 8 different analysts on this blog, at their request, of which the vast majority assume an active pilot. None of these flight paths match the BTOR, BFOR, PDA and GSE, when compared with our proposed LNAV180 LRC FL390 path.
https://www.dropbox.com/s/yv9a8ma3cpubfrv/Contributors%20Flight%20Path%20Proposals.png?dl=0
2. “The analytics on BFO error are deeply flawed.”
That is incorrect. I have provided analyses of MH371 and MH16, for which we have the flight data and the BFO data. In the case of MH16, I have confirmed that the BFO data during the same time period as MH370, and using the same IOR satellite, are a useful route discriminator, being consistent with both the Inmarsat criterion and with the DSTG BFOR PDF. My results also confirm the general OCXO frequency drift behaviour. I would like to analyse further flights, but we do not have the data. We have repeatedly asked the ATSB, DSTG and the Malaysians for further data, but without success so far.
https://www.dropbox.com/s/zkcwpg6znyuzshy/MH16%20Kuala%20Lumpur%20to%20Amsterdam%207th%20March%202014%20BFO%20Analysis.pdf?dl=0
3. “Proposing to search an area already searched is highly questionable.”
In both the case of the ultimately successful searches for AF447 aircraft and the San Juan submarine, the target was initially missed and only found when an area already searched was re-visited. It is possible that MH370 was missed during the initial search.
@Mick Gilbert
You stated “The aircraft was not flown in that fashion (55%)” … “they require invoking modes of flight that were almost certainly never in evidence after the aircraft turned back.” … “mode of navigation, FMC/autothrottle speed setting, Vertical Navigation/altitude, fuel remaining/consumption”.
1. Navigation mode.
We have not assumed any particular navigation mode and tested LNAV, CTT, CTH, CMT and CMH against the data. Our conclusion is that the best fit is with LNAV mode. If the aircraft was flown by hand for 6.98 hours following diversion, how do you account for the BTO vs Time graph in Fig. 1 of our paper referenced above at the top of this current post matching a 2nd order polynomial trend line with a R^2 of 0.9994, and how do you account for the BFO vs Time graph in Fig. 2 matching a linear trend line with a r^2 of 0.998?
2. Speed mode.
We have not assumed any particular speed mode and tested CM, MRC, LRC and ECON against the data. Our conclusion is that the best fit is with LRC mode. If the speed mode was switched off, how do you account for a fuel endurance of 7.63 hours following take off until 00:17:30 UTC?
3. Flight Level.
We have not assumed any particular flight level and tested various flight fixed and variable flight levels between FL250 and FL430 against the data. Our conclusion is the best fit is with FL390. If there were continuous climbs and descents and fuel inefficient flight levels, how do you account for a fuel endurance of 7.63 hours following take off until 00:17:30 UTC?
4. Fuel Consumption.
We have not assumed that the aircraft was flown at its nominal PDA of 1.5% or that there was no load shedding or generators switched off or that the air bleed system was not switched off for at least part of the flight. Our conclusion is that either the PDA will be around the nominal value of 1.5% or the air bleed system was switched off following diversion for a period between 30 minutes and 60 minutes and the PDA will be between 0.09% and 0.64%.
The only match found is for a LNAV180 LRC FL390 flight path.
I find your assumption that MH370 was not flown in LNAV mode, LRC mode and at a fuel efficient Flight Level does not fit the data we have.
@TimR said: Let the boys play with their toys while we wait for the inevitable call to come up with possible search areas.
The good people at OI are interested in defining an area for a new search. If you or anybody else thinks you have information that can help them, I suggest you contact them with your suggestion and not wait for an “inevitable call”. I am not the gatekeeper of input to OI.
@Mick said: The aircraft appeared to be either vertically unstable or altitude was varying, the vast majority of the turnback and the flight up the Strait was almost certainly not in LNAV except for maybe the VAMPI – MEKAR leg, and when last tracked by radar the aircraft was almost certainly at around 30,000 feet geometric (not FL350-390).
I believe that LNAV mode was selected when still near Penang Island. That would mean a considerable amount of the radar track occurred while following waypoints.
Why do you believe that the aircraft was at around 30,000 ft geometric when last captured by radar? I don’t believe that using the radar horizon can definitively determine this altitude, as the radar targets are “windowed”, which would set the maximum range that targets could be detected.
@Mick said: I think that like you what I don’t like about the emerging One True Path solution is that it calls into question a previously generally widely held belief about the efficacy of the search. I mean, up until recently we could take some comfort that despite not finding the wreckage field at least we knew where it wasn’t. Now, if we’re dialling up the uncertainty on the previous search, where does that leave us?
The “widely held belief about the efficacy of the search” was based on information from the ATSB. We (and by “we”, I mean mostly Don Thompson) are now independently assessing whether the debris field could have been missed in an area previously cleared. Without going into specifics, I’ll say the area searched by GO Phoenix using the SAS towfish was not as confidently cleared as we previously thought. Would you suggest we ignore whatever findings develop because it would mean our previously held beliefs were incorrect?
@Nederland
I am in general agreement with you re:end point comments. I’d like keep in touch somehow. As far as path to 19:41, I like Richard’s AGEGA idea but more work is needed.
@Richard @Niels
I agree with Richard above re: very little commercial air traffic in the wee hours west of Inodnesia, qualification: in March_2014 time frame. I am not sure about how much “invisible” (military/etc) air traffic there could be, that we do not see on FR24. In the summer months, there is more air traffic, I think in part due to daylight savings time differences.
@TBill
Perhaps @Victor can forward/msg my email address to you (or the other way round)?
@Victor Iannello:
In case you have never contacted MAS directly, here is a contact form to “get in touch via our Media Relations Team”
Not that I expect much, but you never now. I just think we cannot complain about them not cooperating without ever contacting them (directly) and asking them to do so, if that is the case.
In both the case of the ultimately successful searches for AF447 aircraft and the San Juan submarine, the target was initially missed and only found when an area already searched was re-visited. It is possible that MH370 was missed during the initial search.
It is possible, of course, that the wreckage was missed. Just not very probable. Stone et.al. in the case of AF447 assigned a 10% probability of missing the wreckage with sonar scans. It is also true that the location of the AF447 wreckage was not missed by any sonar scans. The wreckage location was not previously scanned by sonar. Just passively scanned for the pingers which were dead.
https://photos.app.goo.gl/TbY5fT9SRqnQP5At5
In the case of the San Juan, it did not hit the water at 400kts. The debris field was very small. Less than 100m in the largest dimension.
I think AF447 and San Juan are not compelling examples of a missed search.
https://photos.app.goo.gl/j8peyAabFb5cMMwB7
@Richard
Yesterday you wrote to @TBill:
I already responded to @Niels “Waypoint IGOGU is too far south and you then have to introduce a holding pattern to match up the flight route at 19:41:03 UTC onwards.”
I’m sorry I didn’t convey my idea more clearly yesterday. By choosing a 19:41 latitude of N2.0 it would be backward compatible with a turn south near IGOGU and forward compatible with your BEDAX – SP path LRC FL390. No holding pattern needed, just a rather low GS around 360 kts between turn south around 18:45 and climb to FL390 around 20:10 – 20:15.
A question though that comes up after some reflection: if avoiding Indonesian radar was part of a plan, why would BEDAX be part of the route? Isn’t it too close to Sumatra (tip)?
@Peter Norton: Malaysia asked that inquiries about the investigation be forwarded to the Ministry of Transport, and that’s what I’ve done in the past. If you think you can get more information from MAS, you should make that effort.
@Richard
@Victor
Richard,
I have no doubt that you have thoroughly tested multiple variations of navigation and speed control mode together with altitudes to derive a best fit. As you know, your best fit points straight into an area that has already been searched. So, as I noted earlier, it comes back to one of three possibilities:
1. It was missed first time around.
2. It was glided outside the previous search band.
3. It wasn’t flown in that fashion.
I don’t think that the aggregate probability for 1 and 2 can be greater than 50%. I could be wrong.
Victor,
I think that the aircraft was likely around 30,000 feet at the last radar contact at 18:22 UTC because:
a. That is what is reported in the Safety Investigation Report,
b. That altitude is entirely consistent with the Western Hill radar horizon at the range.
I’m always curious as to why anyone would assume that it wasn’t at that reported altitude.
With regards to the search efficacy in the GO Phoenix/SAS towfish searched area, just how poor can that have been? Surely not worse than 80%?
Victor Iannello: “Malaysia asked that inquiries about the investigation be forwarded to the Ministry of Transport, and that’s what I’ve done in the past. If you think you can get more information from MAS, you should make that effort.”
It’s good to hear that you have been in touch with the Ministry and possibly also with MAS. I hope you didn’t understand my message the wrong way, I was just trying to help. With all the frustrating MAS behavior, especially as relayed/portrayed by the media, one would be forgiven to not even try to contact them, as chances of any helpful answer seem slim. But one of the life lessons I have learned is that you have to try, because sometimes you win against improbable odds. That’s why – at the point where we are – I thought I’d encourage you to reach out to them, in case it had not been tried. But apparently you have, at least that’s how I interpret your comment. That’s good to hear. And no, I don’t think I can get more information from MAS than you. I hope I was able to clarify any misunderstanding.
Victor Iannello: “Malaysia asked that inquiries about the investigation be forwarded to the Ministry of Transport, and that’s what I’ve done in the past.”
But the data we would like to get is MAS property, so only MAS itself could give it to you, no?
@Mick Gilbert: The SIR says The only useful information obtained from the Military radar was the latitude and longitude position of the aircraft as this data is reasonably accurate. Based on the unrealistic vertical speeds and high speeds at low altitudes, it’s obvious that the altitude data measured by the military radar is useless. As for calculating the altitude of the radar target by assuming it appeared on the horizon to the radar head, that only gives an estimate of the minimum altitude. For instance, the time window for the radar head at Western Hill might have limited the range to 240 NM, independent of the altitude.
@Victor Iannello
Yes, Victor, the SIR does note that. It also states that ‘… the altitude and speed extracted from the data are subjected to inherent error.‘. It doesn’t say that it’s useless.
It’s worth noting that the altitude data derived from the Malaysian military radar between 17:21 – 17:37 UTC appears to be within about ±2,000 feet of the altitudes calculated independently from analysis of the Kota Bharu PSR data. Surely, that is an indication that the data is not useless.
At the last radar contact you’ve got the altitude roughly corresponding to the radar horizon for the radar. You can believe that that coincidence is not happenstance and that the altitude is correct within an error range or you can believe that some hypothetical technical factor is the reason. What would Occam say?
And just by the bye, I recall Richard noting that Boeing used FL300 as the aircraft’s altitude at 18:28 UTC in their fuel estimates. It would be instructive to know why they settled on that altitude.
@Mick Gilbert
You stated “AGEGA is not out of range of the Thomson TRS 2215 R radar operated by Satrad 233 on Sabang. That radar has a 300+ nm instrumented range and is ideally sited atop a 1,500 foot hilltop.” … and … “Now, here’s the rub. AGEGA – BEDAX comes within 85 mm of Satrad 233.”
Here is a report from the Indonesian Military entitled “Radar Optimisation to improve Our Defence” dated February 2019, which contradicts your assertion. The report is in Indonesian but Google Translate will help you with the relevant parts. The report describes in detail the fact that the 80s technology radar delivered by Thomson never came anywhere near its supposed fully operating range and should be replaced.
https://tni-au.mil.id/konten/unggahan/2019/02/OPTIMALISASI-GELAR-HANUD.pdf
On Page 11 “the maximum range of a fully operating TRS 2215 is 235 NM”.
On Page 12 “the 8 TRS 2215 installations (4 D type, 4 R type) mostly only have a range of 100 NM, because of the difficulty to get spare parts and lack of ability of the repair department”.
On Page 15 “the difficulty to maintain 3 levels of amplifiers reduces the power output because of damage due to overheating in a water cooled system. The maximum range of a TRS 2215 operating with 2 levels of amplifier is 150 NM. Some parts are obsolete and most installations have a range reduced to 100 NM.”
On Page 16 Table 1 shows the current range of each TRS 2215 installation. The maximum range of the Satrad 233 TRS 2215 D / EW 1990 at Sabang is 77 NM.
What is the basis of your assertion, that the Sabang radar was a TRS 2215 R (not a TRS 2215 D as in Table 1 of the above document)?
I maintain that waypoint AGEGA, which is 190.7 NM from Iboih Hill in Sabang, is out of range of the TRS 2215 D radar with a maximum range of 77 NM.
I maintain that the AGEGA – BEDAX flight route, which is at minimum 84 NM from Iboih Hill Sabang, is out of range of the TRS 2215 D radar with a maximum range of 77 NM.
Meanwhile, we know from a reliable source, that the Indonesian Radar was not operating at all on the night of 7th March 2014, but my FMT scenario is based on the fact that the pilot did not know the operational status of the Indonesian radar and assumed from significant regional experience that the range (if operating) would be of the order of magnitude of 100 NM and if he was picked up, he would be deemed “no threat” as he was flying between waypoints on a flight path taking him away from Indonesia and not towards Indonesia.
@Mick Gilbert said: It doesn’t say that it’s useless.
I repeat: The SIR data says The only useful information obtained from the Military radar was the latitude and longitude position of the aircraft as this data is reasonably accurate.
The altitude data is neither latitude or longitude. That means the altitude data is not useful. I equate not useful with useless.
Even without that statement, we know from inspecting the data there are many values that imply aircraft performance that is beyond the performance envelope of a Boeing 777.
On top of that, I’ve had the chance to interview the American official who was on the ground in Malaysia that was tasked with helping the Malaysians to interpret the military and civilian radar data. He assured me that the altitude data was useless due to the state of disrepair of the equipment.
I don’t see how we can accept any of the radar altitude measurements, regardless of whether certain values might approximately agree with estimates by other means. To do otherwise is confirmation bias.
@Richard
Come on, Richard! Are you seriously suggesting that this master plan to avoid radar detection would be based on degraded ranges that weren’t even mentioned until 5 years after the event!? If your perpetrator has mastered time travel then we can all give the game away.
The very simple fact of the matter is that any search of public domain data for the capabilities of the Thompson TRS-2215 radar in early 2014 would have found that it has an instrumented range of in excess of 300 nm. Sabang to AGEGA is 190 nm, AGEGA – BEDAX abeam Sabang is 85 nm.
@Victor Iannello
Victor,
Okey doke then so for the sake of the argument let’s go with your contention that the SIR radar altitude data is useless (even though they just happened to have fluked a very accurate estimate of altitude over a 16 minute period at the start of the trace).
Loss of radar contact occurs at a range coincidental with the radar horizon at about 30,000 feet. That’s a simple, demonstrable fact. I say that’s a pretty good indicator of the target’s altitude. You say it could have been because ‘the time window for the radar head at Western Hill might have limited the range to 240 NM‘. Who’s engaging in confirmation bias?
And it leaves unanswered the question as to why Boeing apparently used FL300 as the aircraft altitude at 18:28 UTC.
@Mick Gilbert
You obviously have not read the report, which covers the whole operating life of the radar systems used in Indonesia from well before 2014 onwards to 2019.
You might do well to also consider why the Indonesian radar systems were not operational on the 7th March 2014.
I am very serious and deliver supporting facts, in contrast to your “come on” style of argument somewhere between useless and not useful.
@Mick Gilbert
Where is your evidence that the Sabang Radar was operating on 7th March 2014 and had an actual operating range greater or equal to 190.7 NM?
Manufacturers glossy brochures are not accepted as evidence of actual operational capability.
@Mick Gilbert: If I am suffering from confirmation bias, you’ll have to explain to me exactly what my bias is. There is definitely an unknown cut-off range for the radar that is independent of the radar horizon. The military radar data is easily proven to not be reliable. Those are facts. I never stated what the altitude was at 18:22 because I don’t think it can be determined with the data we have.
On the other hand, you said when last tracked by radar the aircraft was almost certainly at around 30,000 feet geometric. I would categorize that as a possibility, not a certainty.
@Richard
You are most assuredly not the only contributor to these pages that is both serious and focuses on facts. Whether my contributions have any merit, well, as the Zen Master was fond of saying, ‘We’ll see.’
The very simple fact of the matter is that that report that you are quoting was written in 2019. I surely do not need to point out that it would not have been available to a perpetrator doing route planning in 2014.
As a very serious and facts focussed fellow I should also not need to point out to you that when the authors describe operational capabilities using the adverb ‘currently‘ they are talking about 2019 capabilities, not 2014. Moreover, the authors make it clear on page 15 that the 77 nm range you quote for Satrad 233 Sabang is based on ‘… the latest operating results‘. Again, as a facts focussed fellow I should not need to point out to you that ‘… the latest operating results‘ are most likely 2018 or 2019 data, not 2014 data.
Now, you may not accept mannufacturers glossy brochures as evidence of actual operational capability but ask yourself, what information would a perpetrator doing route planning in 2014 have access to with regards to military air defence radar capabilities? Search for ‘Thomson TRS-2215 range capability’, and you’ll get:
a. A 2002 Forecast International document that lists the ‘Range on 2 sq m target‘ as 330 km or 180 nm.
b. Radar Tutorial http://www.radartutorial.eu/19.kartei/02.surv/karte011.en.html listing ‘instrumented range: 335 NM‘
c. Bharat Rakshak Consortium of Indian Defence Websites. https://forums.bharat-rakshak.com/viewtopic.php?t=275 listing ‘TRS 2215D -> Range 510km‘
d. https://www.scribd.com/document/409557601/TRS-2215 which is a copy of the 2002 Forecast International document
e. Air Power Australia – INDONESIA’S AIR CAPABILITY. https://www.ausairpower.net/Analysis-TNI-AU-94.html. which references the 2215 but offer no capability data.
f. Thomson-GSF develops planar-array antenna – FlightGlobal. https://www.google.com/url?sa=t&source=web&rct=j&url=https://www.flightglobal.com/FlightPDFArchive/1981/1981%2520-%25200777.PDF&ved=2ahUKEwj8yKmzsofkAhVx4HMBHQlsA5wQFjAQegQIBxAB&usg=AOvVaw0PJ-tjaR-818y58Zy4uIZL&cshid=1565959477633 which lists the range for the 2215-D as 190 nm.
So, publicly available data suggests that the range of the Thomson TRS-2215 is somewhere between 180 nm (for a 2m² target – the radar cross section for a B777 is somewhat larger than that) and 335 nm. As a very serious, facts focussed prudent planner keen to ensure that your single most important manoeuvre (the turn south at BEDAX) and probably your second most important manoeuvre (the turn towards BEDAX from AGEGA) cannot be observed, what range do you use for planning purposes?
And here it is worth noting that BEDAX, the location of your single most important manoeuvre, is only 91 nm from Sabang. So, your perpetrator is either absolutely positively certain that the Indonesian air defence radars are not operating that night (in which case routing via AGEGA is not required) or he is flying below 2,000 feet to avoid his final turn south being detected. If he’s doing the latter, I do not need to point out to you that he’s not getting to 34S. This is an issue for the BEDAX-South Pole route at any reasonable flight level – you are executing a critical turn well within the publicly available (and in all likelihood, at the time, the actual) range of the local military radar.
And Richard, let’s be clear, you alluded to the perpetrator routing via AGEGA to avoid Indonesian radar, not me. Thus, the onus is not on me to provide evidence that Satrad 233 Sabang was operating that night. As stated way way back, I don’t believe that any of the Indonesian military radars were operating after midnight but I cannot prove that.
So, there you go. I trust that I’ve managed to score somewhere outside the useless to not useful range with this contribution.
@Mick
I feel you might have a valid point about Boeing. Actually the larger Boeing question, based on the “secret” meetings with France, is the innuendo that Boeing possibly thinks active pilot at end of flight. If true, we really need to know why Boeing thinks that (if we can get that info).
My personal theory is that all participants on the JIT, who helped solve this mystery as far as telling PM Razak it was an apparent intentional diversion, probably have confidential information about the radar track, near-by aircraft tracks (UAE343) and so on. That information is property of Malaysia, and Malaysia is done with MH370.
Possibly there is a future opportunity for JIT/ATSB members to give us some clues they are withholding, but I am not sure. I have behind the scenes made a certain little request for info.
Over a year ago last May_2018, @Ventus45 posted a Aussie radio interview about the final SIR report draft under review by the parties. I thought it was a very enlightening discussion, and I also think the final report probably did not follow the draft in some key ways. But again you are in reference to the hidden information that we are not allowed to know about MH370.
@Victor Iannello
Victor, without wanting to split hairs, I didn’t categorise around 30,000 feet geometric at 18:22 as a certainty either. It is, however, the only altitude estimate that can be matched to a known physical factor, the radar horizon.
@Mick Gilbert: The radar horizon calculation provides the minimum altitude. The range limit is determined by multiple factors, of which radar horizon is one. I disagree with your phrasing that the altitude is “almost certainly at around 30,000 feet geometric”. It’s a possibility.
@Mick
G’day Dennis,
Right off the bat, on the basis that this work is nobody’s day job, I would never be critical of the time taken to publish work.
First of all, I’ve been there and done that. Talking smart under the flourescents all day with colleagues is not very stressful.
I am far busier now being a medic 24/7, a county fire commissioner, cutting fire breaks with a tractor on two properties…
I was not intending to be critical. Just providing feedback.
Anyway, I’ll do the publishing overhang myself. I thought of a new way to use the ISAT data. Will have something to say in a week or so. Going to my coast place today, and Ami has a long to-do list.
A refresher:
We know the (geo) altitude at IGARI was 37200 feet (from ADS-B indicating FL350 and pressure altitude). We know it was ~40,000 feet at KB (from KB Civil PSR). The only solid path information we have after KB is the lat/lon track and ground speed, which remained relatively high and nearly the same as it was at KB until the turn at Penang (~530 kts). After the turn, taking the wind at 35-40,000 feet into account, the TAS remained nearly the same until the end of the Civil BU PSR data at 18:02. The Lido Hotel radar data was also approximately the same (GS ~490 kts). It is possible to maintain this high speed at altitudes down to ~30,000 feet, but not much lower. Given that we do not see any significant change in TAS between KB and 18:22, it seems likely (to me) that the altitude remained high up to 18:22. OTOH, The BTO data between 18:25 and 18:28 suggests some significant speed reduction and/or maneuvering was in play, and the BFO data at 18:40 indicates a descent or turn south at that time.
@Mick,
You wrote “ It is, however, the only altitude estimate that can be matched to a known physical factor, the radar horizon.”
Unfortunately, the radar horizon is not a constant physical factor. Prevailing atmospheric conditions may extend, or reduce, the effective distance of the radar horizon from an antenna.
We have a supporting observation for anomalous propagation effects. In an earlier post at this blog, reference was made to the data received at the Terengganu ADS-B station. While analysing that entire log, many records showed aircraft on arrival to, and departure from, Singapore Changi Airport at altitudes as low as 9,000ft. The range from the closest of the Terengganu ADS-B antenna cluster to these aircraft was approx 400nm, placing the aircraft beyond the horizon of the antenna. Some research for how ADS-B reception could be possible at that range (which I can’t recover just now) indicated that typical tropical tropopause conditions over the Malaysian peninsula resulted in anomalous propagation conditions in the UHF band. As has been stated here previously, the radiosonde data (7-8 Mar) for Kota Bharu, Penang, Medan, and Phuket stations show data typical of anomalous propagation conditions.
@Mick
I’d be curious of your critique of Captio’s radar go-around by cutting over to MEMAK after descent along N571. I find Richard’s AGEGA path very interesting, but I am pretty sure we could go with Captio and adapt that into 180 South path above ISBIX.
I put more merit in Captio than me, but I have also developed a radar go-around path for 180 South, as has @Nederland which he mentions a few posts above. The interesting clincher my path seemed to majically hit the flight path just above ISBIX, which I took as a good omen.
https://twitter.com/HDTBill/status/1038437134791790593?s=20
737 MAX followers.
Further about the Lion 610 and ET302 accidents having different causes, below is a shortened version of an Aviation Week article summarising some of the background, requiring no subscription.
It repeats an assertion made elsewhere earlier that the MCAS change was covered in MAX maintenance documentation. While the pilots were not informed, the maintainers who looked into the Lion Air problem series quite possibly should have been, depending on the content and where in the documentation it was.
The article goes on to say, “Investigators have not explained what happened to the Lion Air JT610 AOA vane, but the report suggests faulty maintenance played a role. A left-side vane removed from PK-LQP during an overnight stay in Denpasar, Indonesia, following an Oct. 27 flight has been analyzed, but investigators have not released any details. Digital Flight Data Recorder (DFDR) data from JT610 and the previous flight the day before, JT43, showed left-side AOA value disagreements during taxi-out.
But ET302’s AOA values were similar until shortly after takeoff, when the left vane’s value changed suddenly and significantly.”
I infer that either the JT610 diagnosis was wrong or the vane was set up incorrectly and, whichever, it was not lack of the requisite information or procedure.
https://aviationweek.com/boeing-737-max-what-happened-and-what-now?NL=AW-05&Issue=AW-05_20190816_AW-05_101&sfvc4enews=42&cl=article_1&utm_rid=CPEN1000000945612&utm_campaign=20752&utm_medium=email&elq2=9983039556d145faac62b20dd091e5ac
@TBill, Richard
I was thinking about IGOGU – MEMAK – ISBIX (and then BEBIM – EKUTA) as well.
However the BTORs are a bit high. I calculate 98 microseconds for lat 2.36 degrees (5 km) which is a typical 19:41 latitude for the ISBIX – BEBIM – EKUTA path. If you go a bit south it becomes better: lat 1.00 degrees gives 47 microseconds (5 km). So I would say AGEGA – ISBIX (or AGEGA – BEDAX – ISBIX) gives an easier BTO match at 19:41.
Regarding the radar discussions: we don’t know if avoiding Indonesian radar was really a priority. Perhaps the main reason for flying low around that area (if that indeed happened) would have been to avoid crossing traffic.
For me both AGEGA as well as IGOGU remain possibilities for the area where the turn south occurred, and both BEDAX and ISBIX remain possibilities as part of the path going south.
@TBill
You and others have mentioned the CAPTIO flight path model a number of times on this blog.
I have now run the CAPTIO flight path through my model:
https://www.dropbox.com/s/hqcpqlcmoyw9a8b/MH370%20Flight%20Path%20Model%20V19.8%20RG%20LNAV%20MachVar%20FLVar%20Waypoints%20Captio.png?dl=0
The CAPTIO flight path is complex with a large number of variations to Track, Speed and Flight Level.
The standard deviation BTOR is 27.1 µs and the standard deviation BFOR is 2.7 Hz. This is achieved by varying the track between waypoints in a realistic manner, but also by varying the speed from CM to ECON to LRC and flight level from 32,600 feet to 27,000 feet to 15,000 feet to 10,000 feet to 5,000 feet in an unrealistic manner and with an unrealistic timing to fit a negative ROC required at certain handshake times.
The fuel consumption is high and increases significantly at the lower altitudes of 15,000 feet, 10,000 feet and 5,000 feet. I calculate there is a fuel deficit of 3,142 kg to complete the CAPTIO flight path and MEFE occurs at 23:34:29 UTC, which is way off a MEFE at 00:17:30 UTC at a nominal PDA of 1.5%.
There is also a very high RMS GSE at 23.3 knots, but a small part of this high error could be my failure to track all the speed changes accurately along the way. There were a number of small differences between the speed schedule published by CAPTIO and the speed schedule derived from the great circle distances between the satellite handshakes.
In general such a complex flight path toward Christmas Island can be discounted as not matching the fuel data, even if a match to the satellite data is forced in an unrealistic manner.
@all
All of the IG’s hard work on a 180S path, especially Richard’s AGEGA proposal, gave me an alternate “magnetic” 180S path idea, further developed below. End point is apporx. 30.75 Souh.
Key points:
> Concept ties toegther ZS simulator study and actual flight path as a 180 South CMH heading, either manually keyed in by the pilot, or as a discontunity; eg; in SkyVector: MEKAR NILAM 0994E 0894E discontinuity
> I propose a new way to interpret BFO by adding an OFFSET to account for expected OCXO drift
> I provide a number of pilot choice options for how a 180 South turn at AGEGA might have happened, which offers path analysts a variety of start points and trajectory options.
> More work is needed to verify, but becuase I have done so darn many 180 South CTH flights in FS9, I feel like 180 CMH might be made to work with the Arcs.
MH370: Mystery Solved? Prelimninary New Flight Path Solutions:
https://twitter.com/HDTBill/status/1162546632929501184?s=20
I have looked at the AEGEA waypoint scenario and joined it to the 180 path, and it would be consistent with at least some of the further waypoint scenarios EXCEPT that it does require that the BFO of the first phone call be ignored or be given a contrived explanation. That is, some change in altitude at the time of the call. Since the time of the call was (we believe) unscheduled, it is not implausible, but it explains away the large BFO error with a speculation.
The IGOGU-ISBIX+ paths have the phone call occurring by chance at the proposed FMT. At least we believe that it was likely that turn was in progress and that the phone call happened to be attempted at that time.
That the BFO for the phone call is subject to a (small) uncertainty since it uses a separate channel cannot justify discarding the value, which is grossly in error unless a decent or a turn is in progress. The second phone call BFO “error” is sufficiently small as to bound the uncertainty.
Richard’s path, my path (which is essentially the original IG path) and similar paths proposed by Yap etc. are data driven and do not attempt to take the plane to some preconceived location that can never be more than speculative.
Again, I am eagerly awaiting Richard’s full proposal and analysis.
BTW, on vacation recently I saw a T-shirt with the following:
“There are two types of people in this world:
Those that draw conclusions from incomplete data; and,…..”
I am afraid that we really can do is to try and do the best with what we have or can find.
@Sid Bennett
Contrived means forced, unnatural or unrealistic.
A descent to avoid other traffic or radar detection is not forced, unnatural or unrealistic. It is quite logical!
@Richard”
…and magic happens…
All we are doing is trying to convince ourselves (and those who we hope are considering our discussions), that one or more of the proposed locations for further search are sufficiently promising that another more focused search with new technology is worth the expense.
The original official search strategy was based on “Bayesian” methods and was unsuccessful. Not having such “sophistication”, the IG mainly focused on an evaluation of a relatively large number of more deterministic paths and tried to eliminate those which were objectively poor matches to the known data at the time.
There exist sufficient gaps in the data to require that each of the hypothesized paths include one or more specific gap fillers so as to result in a plausible path.
I accept the possibility that the actual path could be one of the more convoluted of the other proposed solutions, but one cannot make out a strong case for such a path when there exist at least two plausible locations of the aircraft at the 7th arc.
@Victor, @Bobby,
I have taken a look once again at the Drift Analyses especially from Henrik Rydberg and David Griffin.
1. Henrik’s Non-Flaperon coastline probability graph has a clear peak at a crash latitude of 34°S and is based on Erik van Sebille’s data, which in turn is based on the historic GDP data of 2400 trials.
2. David’s Flaperon to Reunion has a broader region of crash latitudes from 25°S to 35°S and is based on 312 beachings out of 76,200 trials.
I have normalised and combined the 2 data sets, which gives the results shown in the graph linked below:
https://www.dropbox.com/s/heasn6m9620ml3l/Drift%20Analyses%20Synthesis%20Start%20Latitude%20Probabilities%20Henrik%20Rydberg%20and%20David%20Griffin.pdf?dl=0
The drift analysis supports a crash latitude between 25°S and 35°S, with a larger peak at 34°S and a smaller peak at 27°S. If I add my data to that of Henrik and David, it does not alter the result.
@Richard
Re: Captio
I feel Captio contributes some very interesting ideas and videos of air traffic, and especially their early fight path to Arc2 is well thought-out, which unfort in this case is only speculation no matter how good. I am not in agreement with their Xmas Island destination. But if I needed their ideas to get to 19:41 cleanly, I would take it.
@Richard
As the BEDAX – South Pole path passes close to BEBIM, I was wondering if you have considered BEDAX – BEBIM – South Pole and ISBIX – BEBIM -South Pole, both around FL390 – 400. Also BEDAX – BEBIM – EKUTA could be an interesting option to explore, with FL330 -340.
@Richard
The drift study below supports your conclusion.
https://arxiv.org/pdf/1903.06165.pdf
a Markov-chain model defined by a nonutonomous transition matrix capable of resolving shorter-term details of the debris evolution, further identified two probable crash sites within the aforementioned arc portion, one near 36◦S and another one near
25◦S
@DennisW
Thanks for pointing out a further drift analysis that supports the general findings and in particular two peaks near 25S and 36S.
@Niels
Obviously ISBIX is almost a universal fly-by except for the NZPG cases. BEBIM is also possible key point. EKUTA is almost exact at 4095S so that’s what I would use. You seem to be getting on to the slippery slope of intentional non- straight fly path and also manuevers after 19:41. Rules violations for the passive case.
@Niels
You asked “As the BEDAX – South Pole path passes close to BEBIM, I was wondering if you have considered BEDAX – BEBIM – South Pole and ISBIX – BEBIM -South Pole”.
I have considered many combinations of waypoints, including those waypoints you mention.
BEDAX is at a longitude of 93.78757500°E.
ISBIX is at a longitude of 93.67510833°E.
BEBIM is at a longitude of 93.83500000°E.
They do not align, so instead of flying due south, you are flying a zig-zag, if you enter all 3 waypoints into the FMC.
If you are flying 180.0°T from BEDAX, then you miss ISBIX by 12.519478 km eastwards.
If you are flying 180.0°T from BEDAX, then you miss BEBIM by 5.189065 km westwards.
I do not see the point, if you have entered a waypoint of the South Pole following after waypoint BEDAX, why you would need any further interim waypoints.
Once again, we did not put any constraint on longitude for the LNAV180 LRC FL390 flight path. As a result of finding the optimum fit to the data, we subsequently noticed that the flight path passed very close to waypoint BEDAX and closer to the longitude of BEDAX than either the longitude of ISBIX or BEBIM.
@TBill
A route by waypoints can be entered in advance.
The main pilot input I consider (where a would violate “passive flight” hypothesis) is a climb between 19:41 – 20:41.
Anyway, it’s an interesting question, looking at what the 19:41 location as well as the BFO may tell us: what is more “slippery”, to allow (limited) pilot input after 19:41, or to assume fully passive flight?
@Richard
One could think of scenarios where BEBIM (being close to Cocos Keeling) was sort of a “final decision point”.
In terms of defining a 00:19 latitude, which is at the moment the most important challenge, I agree there is not really a point in exploring this much further; except perhaps checking if BEDAX – BEBIM – EKUTA could give a better BTO fit than what we have found so far for AGEGA – ISBIX – BEBIM – EKUTA at FL335.
@Niels
When fine tuning the solution as you have suggested, the computation should include the NILAM waypoint. This further constrains the solution based on accepted ground truth. In doing this we still face the issue of explaining the BFO data at 18:40. For the present, an explanation that a descent was in progress so as to avoid potential air traffic would permit this to proceed.
The descent rate should be consistent with the BFO data and presumably take the plane slightly below 30KFT. a return to a comfortable cruising altitude can occur at any unobserved time. This should require only a slight adjustment of any assumed plane speed if the lower level flight time is not excessive. I did this (without the descent, as I think there are programs better suited for computing that maneuver)for NILAM-AEGEA+180T and found acceptable results.
I don’t know whether this this would help differentiate between the alternatives, but it would make the presentation of the results less speculative.
@Sid Bennett
Is there any other way, than running a wide area search: LNAV 150 degT to 190 degT, LRC speed mode and FL 350 to 410, and then finding the optimal standard deviation BTOR and BFOR, PDA and RMS GSE?
@Richard
As long as it starts at NILAM.
@Sid Bennett
As long as it starts at any latitude, longitude and time without any constraints.
@Richard
FWIW, my latest “unconventional” approach I hinted at a few post ago yields a result very close to your LNAV170 route. It is actually LNAV168 at 850km/hr ground speed, and comes out very near 25S.
Basically the approach integrates the aircraft AES Doppler compensation value needed to achieve correct arc to arc distances (starting at 8N at 19:41), and then asks what speed and track are needed to produce that value of aircraft AES Doppler compensation. I did not try to optimize the start latitude.
I’ll write it up in the next week or so, but the basic idea summarized above should be fairly clear.
@Richard. Decimal-diarrhoea strikes again. This time with millimetre accuracy. It’s the most serious example of the affliction I have seen. I’d recommend seeking urgent medical attention.
It is hard to come up with any reason why the PF would use any WPs after the FMT (wherever that was) other than the final one (like the SP). If there was any maneuver after the FMT, a climb (not a turn) is the most likely change. It is SOP to climb in steps as the fuel is burned off. Changing direction would be contrary to the apparent objective.
@Paul Smithson
You stated “FYI, the 191.0 LNAV path would be something close to:-
Start 18:31:45
Long 95.347, Lat 7.066
M0.8478 (initial TAS 500.5)
Crosses 7th arc at 39.72S”.
Looks like you use 1, 2, 3 or 4 figures behind the decimal point.
I did the same in my response (see below). I must have caught the disease from you!
“You calculate the flight path crossed the 7th Arc at 39.72°S. I calculate 39.51°S, which is not far off your result. There are quite strong headwinds toward the end of flight, which might explain the difference in our calculations. The BTOR standard deviation is 34.2 µs, which is good (nominal 29.7 µs). The BTOR at 22:41:22 UTC is -85.1 µs, which is high. The BFOR standard deviation is 5.98 Hz, which is a bit high (nominal 2 to 5 Hz). The BFOR at 00:11:00 UTC is 6.36 Hz, which is high. The PDA required for a MEFE at 00:17:30 UTC is +2.52% (nominal +1.5%), which means the fuel consumption does not quite fit. There is around 159 kg too little fuel, and the REFE would occur at around 00:07:55 UTC and the LEFE would occur at around 00:15:20 UTC. The RMS GSE is 3.19 knots and peak GSE is 3.265 knots, which is a high (nominal is < 1.5 knots)."
What do you think about the results?
@Richard
Truly a “back of the envelope” approach. How can it be wrong??
Ocean Infinity just barely missed.
https://photos.app.goo.gl/8EH5i7GEukxAVcU5A
@DennisW
I am so pleased that your solution is on the “back of the envelope”.
As a non smoker, a back of a fag (cigarette) packet solution would have been rejected per se.
I will give your solution, detailed in your very long multi line paper due consideration.
@Dennis Workman,
You said: “Truly a “back of the envelope” approach. How can it be wrong??”
I could write a book on the numerous ways your “solution” is wrong.
However, to keep it simple, I will point out that you have derived two parameters, a heading and a ground speed, from a single value of Doppler compensation. That is impossible, since there is no unique solution.
@DrB
Someone already wrote a book about a wrong solution, the DSTG.
If there was a unique solution, I would have found it by now. I picked what I thought was a very reasonable acceptable solution that terminated in an area that has not been searched.
BTW, you said essentially the same thing about my radar solution (which was a correct approach). I did use your handy spreadsheet to compute an altitude associated with my derived value of path length in the cone of silence.
@Richard
Thx.
@DennisW
I have taken a look at your 5 line paper on your “very reasonable acceptable solution”.
You mention a heading of 168°, but the BFO calculation is based on track, so I assumed you meant track not heading. I also assume you meant °T not °M. I assumed a LNAV168°T flight path.
You start at 19:41 UTC from a position at 8°N 93°E on a track of 168°T at a ground speed of 820 km/h.
You do not mention a flight level, so I assumed FL390. Your ground speed implies a Mach 0.791184.
Continuing at this Mach at FL390, your end point is 26.01°S 100.59°E, which has also been searched.
For your flight path, the standard deviation BTOR is 138.59 µs and the standard deviation BFOR is 5.01 Hz, between 19:41 UTC and 00:11 UTC.
I do not find your solution acceptable, due to the very high standard deviation BTOR.
https://www.dropbox.com/s/3tg5zb7a61ruuvs/MH370%20Flight%20Path%20Model%20V19.8%20RG%20LNAV%20CM%200.7912%20FL390%20168%20DennisW%20Full%20Report.png?dl=0
@Richard
Hey, thanks a bunch for running that. Your assumption about track versus heading is correct. My bad. I do that all the time. I am bit surprised by your end point since I simply used a popular online tool for that at 00:11.
Sorry to take up your time on a throw away. I will go through your numbers when I get back to the ranch. I am now holed up at the beach house with vino tinto, cigarette paper, and a chromebook.
https://photos.app.goo.gl/8EH5i7GEukxAVcU5A
@DennisW,
You said “If there was a unique solution, I would have found it by now.“
Coming from a person who finds a unique vector solution from a scalar input, I won’t hold my breath.
DrB,
Please don’t hold your breath.
As an EMT I have a breathing evaluation fixation, and I don’t get distracted by blood loss. Takes longer to bleed out than most people think ~ one quart of blood for 40LBS. A quart of blood on the ground looks a lot worse than it really is. Only takes 4-5 minutes for your brain to die without O2.
BTW, I never said my suggested path solution was unique.
@DrB
BTW, I did not hear any mention of my Doppler approach being novel. I did not extend it beyond 19:41/20:41 since that was not in the “passive rules”. I regret not going to 21:40 since that is a much longer path with potentially better resolution.
In any case, you and I think very differently. Not saying that is a bad thing.
@DennisW
I must confess that I have no idea what your method is based on, but it does sound “novel”. Something “new” may bear fruit eventually.
You have applied your method to the first one of the three hourly segments that are available, vis (19:41 / 20:41), (20:41 / 21:41) and (21:41 / 22:41).
Then, why not extend it, and do it for the next 2 hourly segments individually as well, vis
(a) 20:41 / 21:41
(b) 21:41 / 22:41
And then, if that looks promising, do it across the last two (20:41 / 22:41).
(Since there may have been a course change around 19:41, either before or after).
If that works out, try doing it across all three.
ALSM: “It is SOP to climb in steps as the fuel is burned off.”
In the middle of nowhere and with ATC not a concern, wouldn’t a gradual climb be more fuel-efficient than a step climb (if the intention was to fly as far as possible) ?
@Peter Norton
RE: “…wouldn’t a gradual climb be more fuel-efficient than a step climb..?”
True, but in a continuous climb the rate of climb to achieve the minimum possible fuel burn is very small (< 100 ft/min). The lowest rate of climb that can be set is 100 ft/min, so in practice the optimum climb profile is achieved by a series of step climbs. In oceanic airspace, crews are often granted a block level clearance that allows the aircraft to climb from one level to another in a series of small steps that approximates the most efficient profile.
@DennisW
I stated “Continuing at this Mach at FL390, your end point is 26.01°S 100.59°E, which has also been searched.”
You responded “I am bit surprised by your end point since I simply used a popular online tool for that at 00:11.”
My apologies! I failed to mention that the end point I calculated was at 00:19:37 UTC, not 00:11:00 UTC, which makes a difference of 107.9 km further along the great circle path.
00:19:37 UTC is 4.6429 hours after 19:41:03 UTC and not 4.5 hours (actually 4.4992 hours), that you used for 00:11:00 UTC.
At 00:11:00 UTC, I calculate 25.1°S 100.3°E, which still differs from your 24.5°S 100.2°E by 67.2 km.
This difference is mainly because I used a constant mach of 0.791184 for all legs from 19:41:03 UTC to 00:11:00 UTC, derived from your ground speed of 820 km/h (442.76 knots) in the first leg. With my assumed flight level of FL390, this constant mach, given the actual air temperature encountered for all legs, results in an average TAS of 456.08 knots, which given the actual winds encountered for all legs, results in an average GS of 452.96 knots. With the changes in temperature and wind en-route, you travel a bit further at the constant Mach calculated from the first leg. You assumed a constant GS for all legs, which is a difference of 10.2 knots (85.0 km over 4.5 hours).
Finally online calculators use different navigation formula for great circle paths (haversine, vincenty, …). Not all online calculators account for the earth being an oblate spheroid and adjust for changes in the earth radius at various latitudes (in this case a difference of 3.4 km in the earth radius between 8.0°N at 19:41 UTC and 25.1°S at 00:11 UTC). None of the online calculators adjust for altitude (in this case 39,300 feet, which makes a further difference to the distance travelled of 0.19%).
@Ventus45
You stated to @DennisW “I must confess that I have no idea what your method is based on, but it does sound “novel”. Something “new” may bear fruit eventually.”
Sorry to disappoint you, but the novel method from @DennisW is nonsense.
The BTO is the roundtrip time from Perth to Satellite to Aircraft and back.
The BFO is the doppler shift over the roundtrip from Perth to Satellite to Aircraft and back.
@DennisW takes the difference in BTO at 19:41 UTC and 20:41 UTC and integrates over the elapsed time and creates the BFO as a result. That does not work.
@DennisW ignores the fact that the BTO is time over the roundtrip. His distance of 72 km he calculates for the change in distance between the Aircraft and Satellite from 19:41 UTC to 20:41 UTC should be 36 km according to his calculation. It is actually 40.4 km.
@DennisW ignores the fact that the Satellite is moving.
@DennisW ignores the fact that the Perth – Satellite distance and relative velocity is changing over time.
@DennisW ignores the fact that the Perth – Satellite link has a different frequency to the Satellite – Aircraft link.
@DennisW ignores the fact that the Aircraft is moving and the angle to the Satellite is changing.
@DennisW ignores the fact that the Aircraft has a Doppler compensation.
@DennisW ignores the EAFC and Eclipse Effect.
The fact that the @DennisW calculation appears to work is a pure fluke. It just so happens that at 19:41 UTC, the difference between the round trip and one way doppler, incorrectly assumed by @DennisW, almost equals the sum of the various doppler components that @DennisW ignored.
@DennisW,
You said: “BTW, I never said my suggested path solution was unique.”
Neither did I. What I actually said was: “Coming from a person who finds a unique vector solution from a scalar input, I won’t hold my breath.” My point was that your claim to find a unique velocity vector for the 19:41-20:41 leg using only a scalar input is obviously impossible without making unstated assumptions.
@Richard
Yes, I know that BTO is a round trip time measurement. I integrated over the total two way free space path difference, ~72km.
Satellite motion, eclipse effect, EAFC, satellite to Perth frequency,…are all irrelevant using this approach. I knew that would disturb a lot of the congnoscenti.
Of course the satellite to plane geometry changes over time. Using the Doppler compensation at a point in space and an instant of time uses what the aircraft thinks its location, speed, and track are at that instant in time. I don’t ignore aircraft Doppler compensation. I do ignore everything else. As DrB points out, the scaler frequency result does not allow a unique speed and track to be determined. So what? None of our other approaches to the problem does either.
Five years does a lot to polarize your thinking relative to your approach to a problem.
@DennisW
I have chased a lot of proposed paths over the last 5 years and can say that there has been a continuous evolution of thinking by the group as a whole.
My experience is that one can find a very large number of partial paths that offer satisfactory fits to the data. That may help to stimulate efforts to extend the path to a full path having acceptable statistical errors.
There are several models that permit such searches, but I am sure that each one of them is limited in some way in the scenarios that it can easily explore. If you do not have such a model, then you are dependent on convincing a person who does to provide access to it or to be inspired by your result to expend the effort to do so on your behalf. Richards modeling is said to be consistent with Dr.Bs and Victors, and Barry’s model differs primarily in the met data (which may lead to different Mach speeds. Each model probably uses different goodness of fit criteria, but this is a detail.
Earlier there were a number of efforts to explain the difficulty in connecting the pre and post-FMT paths, and the results were unsatisfying (except for IGOGU-ISBIX :-)). When the focus turned back to the satellite data, the recent tendency is to focus on the 180T path, which has the drawback (assumption) that a descent is needed at 18:40 to account for the BFO data.
The IGOGU-ISBIX path has a corresponding drawback (assumption) as the specific navigation mode after an end-of-path discontinuity at ISBIX appears to be uncertain.
Most of us favor a simple path with little or no pilot input, not because a path with pilot input is impossible, or even improbable. but because such a path has so many possible variations that a physical search is impractical on cost grounds. This concern, in my view, is why the glide scenario is less favored than the “dive” scenario.
@DennisW
Please show me your results for the second leg from 20:41 UTC to 21:41 UTC then, if your methodology is so sound, as you claim!
@Richard
OK, I’ll see what I can do with just the chromebook. Octave (open source version of Matlab) online does work pretty well.
@Richard
“… fuel consumption … I calculate there is a fuel deficit of 3,142 kg to complete the CAPTIO flight path and MEFE occurs at 23:34:29 UTC, which is way off a MEFE at 00:17:30 UTC at a nominal PDA of 1.5%.”
Hello Richard, your finding appear somehow “unrealistic” to us 🙂
May I re-iterate my request if you could possibly provide us with you fuel consumption model. So far we have used Bobby’s fuel consumption model and computed the fuel consumption every second along the CAPTIO path including the real meteo data interpolated for each second also.
We would like to include your alogrithm and fuel consumption tables you have used in our CAT tool to estimate CAPTIO fuel consumption.
Comparing both models would be of great interest to improve the most probable consumption along the fully “piloted” path.
For sending us your model, please use my mail address used for this blog.
@victor
Thanks for the enthousiastic animation of this blog !
Cheers,
JLuc
@Richard
Rough cut of your request below (continued from previous 19:41->20:41).
I bolded the 476Hz of AES Doppler compensation because I was surprised by the precise match to the calculated value for integrated Doppler.
I don’t have anything at all relative to MH370 on this chromebook (no ping rings etc.) so I am truly winging it without my Mac. I did not cheat by looking at your spreadsheet.
https://photos.app.goo.gl/kWQi92knHFWpLRWk6
@Richard
BTW, my calculations are not done to the same presision as yours. i.e. I use 3X10^8 m/sec for light speed not 2.9979…X10^8. I am not paying attention to 0.1 degree precision. I am merely trying to demonstrate a principal. You can grind it to any precision you like. That’s just not my bag.
@Sid Bennett,
You said: “When the focus turned back to the satellite data, the recent tendency is to focus on the 180T path, which has the drawback (assumption) that a descent is needed at 18:40 to account for the BFO data.”
A descent is not necessary in that 180T case to match the 18:40 BFOs. For instance, a turn before 18:40 to the SW or to the SE can match the BFOs then, followed by a turn to BEDAX at the appropriate time to meet up with the LNAV 180 route. The result is a bit circuitous, but it works. So no assumption about the 18:40 maneuver is needed for the LNAV 180 route.
@Jean-Luc Marchand
You stated “Hello Richard, your finding appear somehow “unrealistic” to us” … “May I re-iterate my request if you could possibly provide us with you fuel consumption model.”
My apologies! I missed the first request from you on the 30th December 2017.
Here is a link to my emulation of your flight path including fuel consumption.
You will find the result of a fuel deficit of 3,142 kg in cell AQ3.
https://www.dropbox.com/s/h1qvw86qyr0471w/MH370%20Flight%20Path%20Model%20V19.8%20RG%20LNAV%20MachVar%20FLVar%20Waypoints%20Captio%20Fuel.xlsx?dl=0
@Richard
BTW2, please don’t think I am recommending (or criticizing) anything. My quest was to derive paths that did not rely in any way on BFO measurements. BTO is a much more reliable metric. In fact it is the only reliable metric we have. I put the BFO data is the same category as the drift data and fuel usage, interesting and useful, but frought with uncertainty.
There is nothing uncertain about the AES Doppler compensation either. It is defined on the basis of position, track, and speed.
@Richard
Thanks for your quick response. I will come back to you shortly (I am currently on vacation).
@DennisW
AES Doppler Compensation
At 8.0°N 93.0°E 168°T 820 km/h, the AES Doppler Compensation is not 110 Hz, it is 29 Hz.
At 0.78°N 94.5°E 168°T 820 km/h, the AES Doppler Compensation is not 476 Hz, it is 133 Hz.
@DennisW
You stated “You can grind it to any precision you like. That’s just not my bag.”
Your results are not even in the ball park.
We do not need to discuss precision, wind, weather, fuel, satellites moving, eclipses, …
Although, for the first time in 5 years on MH370, I have recently been accused of too much precision.
Normally, I get accused of too little precision.
You are dead if you do and dead if you don’t.
@Richard
I had a look to your Excel file. The cells provide values and no formulas.
Could it be possible for you to provide the formulas for columns AG to AN as we would need them for computing the consumption every second ?
Thanks a million,
Regards,
JLuc
@Richard
I am using the equation for “D1” in the graphic linked below.
https://photos.app.goo.gl/nDxeWTpPejezRwHdA
@DrB @Victor @Richard Godfrey
I keep coming back here with bated breath. How long before the next paper? And still no chance of open sourcing your code, or in some way sharing it?
@DennisW
D1 is what I call the “Aircraft Satellite Uplink Doppler”, which is different from the AES Compensation Doppler.
At 8.0°N 93.0°E 168°T 820 km/h, the Aircraft Satellite Uplink Doppler is not 110 Hz, it is -11 Hz.
At 0.78°N 94.5°E 168°T 820 km/h, the Aircraft Satellite Uplink Doppler is not 476 Hz, it is -169 Hz.
@Jean-Luc Marchand
I am sorry, I only compute the flight path and fuel remaining every minute.
Surely you can compare the values every minute with what you calculate every second and see where the differences are.
I have given you all the parameters you need, time, latitude, longitude, altitude, SAT, TAS, SAT, WNDSPD, WNDDIR, GS, ∂ISAT, Weight, Fuel, Flow Rate, … to align your results.
I am not willing to share my flight model until at least after publication of our next paper.
@Richard
Wow! How can we possibly get such different values using the same equation? Something is very very wrong. I would ask other people to chime in.
@Richard
BTW, what I am calling aircraft->satellite uplink Doppler is labeled “D2” in the figure I linked earlier.
@Rob Moss
There is no deadline for publication of the next paper. It will take whatever time is required, until we are satisfied it is ready for publication.
If you are willing to fund the project to prepare an open source version of my model, I am willing to consider offers. I have invested well over 1,200 days in this project in the last 5 years.
Currently, there are 3 independent models and Bobby, Victor and I do not have the source code of each other’s model. This has been done on purpose to avoid systemic errors.
The 3 models have been put through a rigorous test program, but all each of us know, is that the results align.
@DennisW
My apologies! Then back to the original comment …
D1 = AES Doppler Compensation
At 8.0°N 93.0°E 168°T 820 km/h, the AES Doppler Compensation is not 110 Hz, it is 29 Hz.
At 0.78°N 94.5°E 168°T 820 km/h, the AES Doppler Compensation is not 476 Hz, it is 133 Hz.
@DennisW
You stated “Wow! How can we possibly get such different values using the same equation? Something is very very wrong. I would ask other people to chime in.”
I have already tested my satellite model against both Bobby’s model and Victor’s model.
Barry Martin has also audited my satellite model including BTO and BFO calculations.
@sk999 also recently stated “Richard, Our BTO and BFO calculations are extremely close, so I stopped checking those.”
What model are you using?
@Richard
I need to pause and regroup. I’ll get back to you later.
@Richard
FWIW, you are right. Looking at the heading and latitude error senstivity example used by the ATSB (in more than one place), I get the right values for BFO. However, my D1 and D2 are way off. My D3 (satellite to Perth Doppler is spot on). Likewise my BFO predictions match everyone else’s – yours, Inmarsat’s, Victor’s,… I never checked the individual elements. This is so Bizarre. I will find the error. Whatever it turns out to be it results in a freakish match to my latest efforts based on BTO differences.
@DrB
I agree that if the plane is coincidentally flying at the appropriate azimuth, speed and geographical position to match the BTO at 18:40 and then joins with the post FMT track in a simple manner (for example, same M) that this would “explain” the data. However it is an assumption to fill in a significant gap in the actual data during the time frame of the turn to the SIO.
One could say the same thing about the IGOGU location of the FMT, but the telephone call BFO is consistent with a turn occurring at that time. Fortuitous it may be, and misleading it also may be, but it is a satisfying result.
I urge you to explore the IGOGU-ISBIX hypothesis more fully. I am sure that at a constant M, you will be able to find a good match with a start time within +/- 1 minute of 18:40. I would be happy to send you whatever information you need.
In the end, there will be two hot spots with two cases at each hot spot: glide or no glide.
@Sid Bennett,
You said: “I agree that if the plane is coincidentally flying at the appropriate azimuth, speed and geographical position to match the BTO at 18:40 and then joins with the post FMT track in a simple manner (for example, same M) that this would “explain” the data. However it is an assumption to fill in a significant gap in the actual data during the time frame of the turn to the SIO.”
First, there is no BTO at 18:40. I suppose you meant BFO.
Second, there is no “coincidence”. The plane was somewhere at 18:40, and that is not a coincidence with anything else, as far as I know.
Third, at the present time no one knows the maneuvers employed between 18:28 and 19:41. That is why all predictions during this time period are based on assumptions, not on data. That is also the reason why we have begun our route fitting at 19:41, with an extrapolation backward in time to see if the route passed through any waypoints prior to 19:41. The only constraints we have used from 18:28 to 19:41 are (1) that the 19:41 position was reachable and (2) the fuel consumed during that period was approximately accounted for.
I and others looked at IGOGU-ISBIX back in 2014-2016. Our recent work seeks routes that are consistent with all the data – satellite, fuel, and drift. It is not based on making guesses about waypoints. So far there is only one route consistent with all three. In fact, that route provides the best match individually to each of these three sets of data/ predictions.
The glide question factors into search area priorities. I would say a glide is less likely than not, so I would recommend doing a new and very thorough search near the arc first, followed by a widening if that proves unsuccessful.
@Richard
Stupid mistake on my part. My routines for calculating Doppler expect speed in meters/sec. I was inputing kilometers/hr.
meters/sec = (kilometers/hr)*1000/3600 = (kilometers/hr)/3.6
I was inputing a speed 3.6 times too high. Hence, my Doppler values were 3.6 times too high. I supposed you should expect stuff like that to happen when you don’t use code for awhile.
@DrB
At the time that the IG proposed a hot spot (instead of a statistical distribution along the 7th arc), I and others did not use the waypoint ISBIX, and to be more precise, the path is IGOGU+186T, which just happens to overfly ISBIX. Thus, it became shorthand for a path that was determined (at least by me) by seeking a satisfactory solution by studying the path azimuth from IGOGU and FMT location and time along N571. That the most likely integer azimuth was 186T and the FMT time that led to the lowest errors were derived from a study of the behavior of the data without further assumptions. The Mach also was consistent with typical flying.
The most probable FMT time (not using the first telephone call BFO) was 18:40 which just happened to coincide with IGOGU and the first telephone call BFO is consistent with a turn happening at that time. The assumption made is that a single turn was made from N571 with the study starting at the location of the last radar point. (That last radar point is taken on faith as one cannot ascribe a object identification to a single skin echo radar observation. (The studies were re-published to this blog within the past two months.)
Nothing has changed since the studies were made some years ago, except that you are using a met model that is probably more accurate.
In view of the lack of success in the physical search, it is entirely understandable that your approach to the problem casts a wider net. It seems to have led to another plausible location (also previously searched).
Richard tried a path that I suggested and found that it did not fully meet your criteria. I looked at it again and found that a slight adjustment of the lat long of the start and a slight adjustment of the Mach improved it. It would meet your criteria (although I don’t consider fuel consumption). If you tried it, I am sure that a different Mach and/or altitude would be required since the met data is different.
I continue to make an effort to join a NILAM-AGEGA path to 180T in a simple manner.
@Sid Bennett said: It would meet your criteria (although I don’t consider fuel consumption).
What you describe is the approach that many of us took 4-5 years ago. Although there is some value in re-visiting those results, I think there is more value in incorporating the knowledge and insights gained since then, including:
1) Results from the previous search efforts
2) Accurate fuel modeling
3) Drift model results that incorporate recovered debris data
4) Improved statistical methods that separate systematic errors from stochastic measurement errors and also incorporates fuel and drift models
5) New insights into miss probabilities for the search that better include the effects of terrain and sensor type (SSS v SAS)
Bobby and Richard are taking the lead on (4) and Don is taking the lead on (5).
@Richard
With my Doppler mistake corrected your LNAV170 path looks very good to me.
@VictorI
My last post, and many of my previous posts make it clear that I understand and appreciate the current efforts to make a more exhaustive search and to consider other data that may be relevant.
Where I disagree is that the current studies defer asserting a specific path joining NILAM to the post FMT tracks. Surely one or more of the proposed paths in the article being commented on here can be eliminated or downgraded on the basis that the early path required is inconsistent with the fuel requirements.
Perhaps I am missing some point, but I do not understand how the fuel consumption can be studied without a hypothetical complete path.
@Sid Bennett
You stated “Where I disagree is that the current studies defer asserting a specific path joining NILAM to the post FMT tracks.”
That is not true!
I joined NILAM to the post FMT path via waypoint AGEGA.
Or have you forgotten or discounted that possible scenario?
@Richard
Does it predict the BFO value at 18:40?
@Sid Bennett said: Perhaps I am missing some point, but I do not understand how the fuel consumption can be studied without a hypothetical complete path.
Complete paths are under consideration that include the fuel consumption for the entire path, improved statistical methods, and drift model results. The whole point is to advance the precision and the breadth of the analysis compared to what has been analyzed before. Without including these advancements, we would just be repeating what was done years ago.
@Sid Bennett
You asked “Does it predict the BFO value at 18:40?”
Once again, the answer is yes.
I stated “a descent would be required to fit the BFOs at 18:40 UTC.”
You know very well my proposed scenario required a descent at 18:40 UTC, because you commented at the time, that you thought a descent at 18:40 was “contrived”, to which I responded “contrived means forced, unnatural or unrealistic. A descent to avoid other traffic or radar detection is not forced, unnatural or unrealistic. It is quite logical!”
I first mentioned a path that joined NILAM to the post FMT path via waypoint AGEGA just 10 days ago on this web site.
Please see : https://mh370.radiantphysics.com/2019/06/30/a-comprehensive-survey-of-possible-mh370-paths/#comment-24842
@Richard
For the sake of completeness, and to acknowledge your feedback.
From 19:41 to 20:41 the BTO difference was 72km (240usec). Your feedback relative to using half that distance for Doppler purposes was spot on. The plane traveled 36km from the satellite over the time period of ~1 hour. 36km/hr = 10 meters/sec. Yes, the Doppler changes slightly (very slightly) over the path. 10 meters/sec yields a Doppler value:
F = 10*FL/C = 54.68Hz
The value that should be compared to Doppler Comp.
where FL is the L1 of the AES, and C is light speed.
Using the formula for D1 which I published earlier yields:
AES(870 km/hr, 170 heading, 7.86N, 93.8E) = 54.89Hz.
Spot on. No dAFC, no eclipse effect, no Perth corrections, no AES oscillator drift questions. Subsequent points yield similar results.
@Richard
170 is the track not heading. I am insufferable.
@DennisW,
Where will you list the infinite number of other possibilities which are also “spot on” in having the same AES Doppler compensation frequency? You have assumed 3 of the 4 parameters required for each of the infinite number of solutions. The solution space to your equation covers the entire IO and SIO. The one you listed has nothing to recommend it over many, many others.
@DrB
I agree with your synopsis. You know I do.
The difference in BTO provides an accurate means to infer the actual Doppler. The use of AES compensation allows us a choice of options that fit. The important takeaway is the use of the BTO difference to infer the Doppler. Why are you fighting it? It is another tool in our limited toolbox.
@DennisW
You stated “With my Doppler mistake corrected your LNAV170 path looks very good to me.”
Well, that is a shame, because the LNAV170 LRC FL350 does not look very good to me.
The standard deviation BTOR at the 5 handshake times between 19:41 UTC and 00:11 UTC for LNAV170 LRC FL350 flight path is 44.6 µs (nominal < 40 µs). The standard deviation BTOR for LNAV180 LRC FL390 is 38.3 µs, by comparison.
Individual BFOR values for LNAV170 LRC FL350 are too high (max. BFOR at 22:41:22 UTC is 10.5 Hz, nominal < 7.5 Hz). The individual BFORs for LNAV180 LRC FL390 are all < 7.5 Hz, by comparison.
A Latitude of 28.0°S at 00:19:37 UTC does not match the drift analyses of David Griffin, Henrik Rydberg or myself.
I discount a LNAV170 LRC FL350 flight path as a indicating a region of interest for a further search.
For the BFOR, it is meaningless to look at only the AES Doppler Compensation in isolation, you have to consider the Aircraft Satellite Doppler, the Satellite Perth Doppler, the EAFC Effect (- 1.25 Hz at 19:41 UTC, but much larger at other handshake times) and the Eclipse Effect (0.04 Hz at 19:41 UTC, but much larger at other handshake times). Your new method is not another tool in our limited toolbox, it is meaningless because it is an incomplete calculation, useless as a search area differentiator and misleading because it is taken in isolation.
@Richard
I’m going in detail through the four sheets you have prepared around my “Case C”. First the one which was posted on August 12th:
https://www.dropbox.com/s/4sdh9czte7jsiwo/MH370%20Flight%20Path%20Model%20V19.8%20RG%20LNAV%20LRC%20FL335.3%20Waypoints%20Niels%20Case%20C%2012082019%20Full%20Report.png?dl=0
The most important question I have is how you exactly define/calculate GSE?
I see a GSE between -2.2 and -3.3. Couldn’t that be improved through a slight change in FL?
Another question is what you assumed between 00:11 and 00:19. I see a significant change in FL with large impact for example on BTOR.
@Richard
The charm of LNAV170 is the proximity of the flight path to the COCOS as a possible bail out. I don’t view any of your “long list” of negatives as deal killers.
@Richard
« The CAPTIO flight path is complex with a large number of variations to Track, Speed and Flight Level. »
Large number of variation to track? There are only 3 turns after 19:00UTC. With a human in command that is not so unrealistic 🙂 By the way, in the Excel file, your simulation of the CAPTIO trajectory shows a strange repetition of itself between 22h41 and 22h44 with what it already travelled between 22h37 and 22h40.
Variations to speed ? no, for us the reference KIAS has been set constant at 240kt from the top of descent at 18h40 until 21h45 when reaching altitude of 5000ft. Then LRC cruise mode was switched on when leveled at 5000ft.
The FMS was automatically keeping the KIAS at 240kt in a continuous fashion all the way from 18h40 till leveled at 5000ft. This reference setting of 240kt via the mode ECON DESC 240kt automatically detected by the FMS (or by the « people in command » as an alternative ) makes that the TAS automatically varies accordingly and is thus de facto gradually reduced as the altitude lowers due to the physics laws. When levelled at 5000ft the LRC mode makes that the TAS slightly increases as the aircraft weight decreases.
@Richard
« I calculate there is a fuel deficit of 3,142 kg to complete the CAPTIO flight path »
I had a look at your Excel in spite the lack of details on your algorithm. It appears that the descent segments are not simulated for the fuel consumption calculation. The descent took an accumulative 46min from altitude 32800 (or so) down to 5000ft. This is not neutral. Your fuel consumption modelisation is thus much too coarse for you to draw the conclusion you posted as you simulate this descent in a duration of a total of 4 minutes only making the average ROD at -4500fpm which is unrealistic. During the 46min descent with low thrust engines the fuel consumption is much lower by… approx 3.000 Kg ! the ones you found missing… Secondly computing the fuel consumption at large intervals of 1 minute along the trajectory as you did, is also too coarse thus impacting the precision of your results.
So, to the contrary of your interpretation, your coarse modelisation – if corrected with the missing descent segments – is actually roughly in accordance with the fact that CAPTIO trajectory fuel exhaustion is close to Arc7.
@Andrew
Re your #comment-24970
Instead of setting a minimum rate of climb (which as you say, for a B777, is less than 100 ft/m) , wouldn’t it be better to just set a constant IAS/CAS ?
I would have thought that you could get an optimal drift climb / cruise climb, by simply setting the appropriate constant IAS / CAS, so that as fuel burn reduces weight, she should simply drift up, very slowly.
Can you do that in a B777 (or any Boeing or Airbus for that matter) ?
@Jean-Luc
My sense is that Richard is under a lot of stress right now trying to show a signifcant statistical preference for an unpiloted route. I know, you should know, and anyone with a brain should know, that is not going to happen.
Don is looking at missed search probabilities. What is he going to come up with? 10% (the Stone AF447 estimate). 20% or 30%? The fact will remain that it is unlikey that the previous searches missed the wreckage.
Sorry, but we are wasting time on these efforts. Go North from 25S.
@Ventus45
RE: “I would have thought that you could get an optimal drift climb / cruise climb, by simply setting the appropriate constant IAS / CAS, so that as fuel burn reduces weight, she should simply drift up, very slowly.”
Theoretically, yes; however, the improvement in range would be very small. In practice, the optimum profile is approximated via a series of small steps, which yields a range very close to the theoretical maximum.
@Niels
You asked “The most important question I have is how you exactly define/calculate GSE?”
In the paper linked as part of the current post, I state on page 14 “The along-track Ground Speed Error (GSE) is the difference between the leg average Ground Speed calculated from the Latitude and Longitude of the leg start and end points at each satellite handshake compared with the average Ground Speed predicted by the model every minute during the leg. The RMS GSE is expected to be between 1.0 and 3.0 knots.”
In the example Case C you reference dated 12th August 2019, the Curved Path Length calculated using the Vincenty formula and corrected for an Altitude of 34,969 feet for the Latitude and Longitude at 19:41:02.906 UTC and 20:41:04.904 UTC is 477.0525 NM. Given the elapsed time of 3601.998 seconds, the Average Ground Speed is 476.7879 knots. The 1-Minute Leg Average Ground Speed from the Flight Model is 480.095 knots. The difference gives a GSE of -3.307 knots.
You also asked “Another question is what you assumed between 00:11 and 00:19. I see a significant change in FL with large impact for example on BTOR.”
I assume that at REFE at around 00:12:55 UTC, the Left Engine goes the CLB Thrust. I assume the TAS decreases at 17.5 knots/minute and after 4 minutes the ROC is -600 fpm. At LEFE at around 00:17:30 UTC, the ROC increases to -10,000 fpm.
@Jean-Luc Marchand
You stated “your simulation of the CAPTIO trajectory shows a strange repetition of itself between 22h41 and 22h44 with what it already travelled between 22h37 and 22h40.”
I forced my model to match your stated latitude and longitude at each handshake, otherwise you would complain that I am not calculating the BTO and BFO at precisely the same latitudes and longitudes. You will therefore find a small difference at each handshake 19:41, 20:41: 21:41, 22:41, 00:11 and 00:19 UTC. That is because your weather model or navigation calculation differs from mine.
You claim you have only a few speed changes, but you vary from CM to ECON to KIAS to LRC. How realistic is that?
You claim you have only a few altitude changes, but you vary from 32,600 feet to 27,000 feet to 15,000 feet to 10,000 feet to 5,000 feet. How realistic is that?
You require a negative ROC at certain handshake times and you time some of the multiple descents to fit the handshakes. How realistic is that?
Of course you will calculate that the descents save precisely the 3,142 kg fuel required to complete your flight path
Your model is contrived, forced, unnatural and unrealistic.
My model has been independently audited. Has yours?
I have tested my flight model against both Bobby’s model and Victor’s model and it matches exactly. Does yours?
@DennisW
You stated “My sense is that Richard is under a lot of stress right now trying to show a signifcant statistical preference for an unpiloted route. I know, you should know, and anyone with a brain should know, that is not going to happen.”
Having been proven scientifically wrong with your new method, which you have put forward “ad absurdum”, you now resort to attacking me, implying that I have no brain “ad hominem”.
You no longer have any argument, so you attack the arguer.
Great science Dennis Workman!
@Richard
Thank you for explaining. So I think I get how you calculate the GSE, however what is then causing it? Because isn’t the flight model obtained GS the one that integrates into the lat, lon at each moment in time?
@DennisW said: My sense is that Richard is under a lot of stress right now trying to show a significant statistical preference for an unpiloted route. I know, you should know, and anyone with a brain should know, that is not going to happen.
How wrong you are. Actually, Richard and I are quite impressed with Bobby’s recent results, which show a strong preference for a particular automated route. So when this is presented, will you apologize for your incorrect, abrasive comments?
@Richard
Excellent posts at Aug 23 05:03 and Aug 24 05:15.
I’m personally delighted at the collaborative science-based approach with which Dr B, you/Victor/Don/IG and others like Andrew and SK999 are taking this forward.
Watching every step with great interest and looking forward to the report when it arrives.
Dennis:
Re: Don’s work on refining the chances of a miss…
I understand your sentiment, but but I have already seen some of Don’s work products and it has reinforced my belief that the chance of a miss is higher than generally believed by experts. How much higher is an important estimate.
The SJ raised suspicion, but Don’s work is confirming that MH370 may be at S37.7, S34.4 or one of the other previously searched “hot spots”…or somewhere else entirely along the 7th arc. This is important, especially for OI’s next search plan. The last OI search was based on the belief (at the time; Dec 8, 2017) that the chance of a previous miss was ~3%, the chance that it was beyond ±22 nm was ~10% and thus the search was focused on unsearched areas within ±22 nm (a little wider in some spots).
But consider how that calculation might go today…now that >90% of the feasible 7th arc has been searched without success. If the chance of a miss is, in fact, 10%, not 3%, it becomes more of a toss up.
However, if this turns out to be the case, the work Victor, Bobby and Richard are engaged in becomes even more important. If there really is a new “fact and science based Hot Spot” around S34.4, then the next search should consider starting there and first searching the nearby area already searched, then out to ±50 nm in the that area.
@Richard
I more or less figured out with additional help by the previous article (Bobby’s note) how determination of GSE would approx. work. If my understanding is correctly then there would be needed a second set of lat, lon combinations (path crossings with the arcs). I don’t see those in the sheets you prepared. Probably I’m misunderstanding or missing something; can you please explain?
Please Keep up the good work gents.
I’ve learnt so much following this.
@Victor, @M Pat, @ Tom O’Flaherty,
Your comments are all gratefully noted.
@airlandseaman
I have not yet had the chance to see Don’s results, but I respect Don’s work and know he will do a thorough job.
I was motivated to see if there were waypoints other than IGOGU that were compatible with a 186T track after the FMT. I was surprised to find that SAMAK yields just as good a fit as IGOGU.
SAMAK is 313T from NILAM and I turned to it at 18:29. The turn to 186 is at 18:40. The fit is best at that time and degrades as the turn is made earlier. I have not as yet studied that behavior in any detail. What I can say is that any time after 18:40 does not fit and the solution degrades very rapidly.
The turn to 186T is made just before the phone call and, surprisingly, the fit to the phone BFO is quite good, the difference presumably being due to the slightly different plane location at the time. of the phone call. The difference between the IGOGU and SAMAK cases is that for IGOGU we postulate that the turn occurred at the time of the phone call and for SAMAK the turn occurred just prior to the phone call.
For the record, I used an altitude of 35kft and a M=0.829. I do not expect these values will be same when a different met model is used, but there should be an equivalent height and M. The TAS is 488.7kt. at 18:23.
Nothing here should be taken as casting the slightest doubt on the 180T path being currently studied by Richard et al. It is likely the sparsity of the relevant data that permits more than one plausible solution to exist. All of this differs from DSTG in that it is a hot spot and its uncertainty that are being studied, rather than a probability density along the arc.
You may very well be asking the question “Why is Sid spending so much time on this path. It was the IG consensus path”. The simple answer is that this path is not shown in the table in the paper presently being discussed on this thread.
@Niels,
@Richard,
Perhaps I can provide some insight into the Ground Speed Error (GSE) calculations. Let me explain further.
1. The GSE is defined for each leg as the average leg ground speed derived from a pair of lat/lon positions (which are found by the route fitter) minus the predicted ground speed form the aircraft flight model. Since the handshake times are known, we only need to know the length of the path (i.e., the range) traveled at altitude between the two positions in order to determine the average (ground-referenced) speed along the flight path.
2. The ground-referenced positions and speeds are what determines BTO and BFO. Air speed is immaterial.
3. My aircraft flight model predicts air speed (TAS) along the path. The predicted TAS depends on the predicted local air temperature (interpolated from the GDAS data base) and the predicted Mach. The predicted Mach depends on the speed mode/best-fit Mach, the aircraft weight, and the flight level.
4. The predicted ground speed is the vector sum of the predicted TAS (in the heading direction) and the interpolated wind “to” vector aloft. The predicted ground speed is in the track direction. When the winds are perpendicular to the track, the ground speed is slightly less than the air speed by approximately the cosine of the difference between the heading and track directions. When the winds are against the track direction, you have a headwind, which reduces the ground speed compared to the air speed. When the winds aloft are along the track direction, you have a tailwind, and the ground speed is higher than the air speed.
5. In my method one determines the wind vector at numerous points along each leg of the route. At each intermediate location the wind (“to”) vector is found, and the heading and predicted ground speed (along the track) are computed. Then the average predicted ground speed is calculated for the entire leg from the intermediate values along the leg.
5. There are several reasons why the predicted and the best-fit ground speeds will differ for a leg. First, the speed mode or flight level used in the route fitter may be incorrect. Second, the GDAS wind and temperature data may be incorrect.
6. There are common-mode errors in temperature and wind to which we are insensitive. For instance, a mean temperature error over the entire route (all legs) is essentially removed by the fitting of the flight level. Similarly, a mean air speed error is removed by fitting flight level and/or speed mode/Mach. That means that we are insensitive to the mean ground speed error over the whole route because we fit the air speed mode (or Mach number) and the flight level. To summarize, we are sensitive to the differences in GSE from leg to leg, but not to the average GSE along the route.
7. We know the GDAS temperature data are generally accurate to 1C or better. The GDAS wind components (U and V) appear to have differential errors on the order of a knot or two when averaged over fairly long legs (500 NM or more). So, the comparison of GSEs from leg to leg will show much smaller errors than the absolute error at one point at one time. My experience is that these (leg-to-leg) differential GSEs are within +/- 1 knot for routes which have acceptable BTORs and BFORs.
8. We know the GDAS database has errors, and these degrade the accuracy of our predicted average ground speeds for each leg. One must allow those differential ground speed errors to exist if one wants to most accurately predict the actual aircraft locations at the handshake times.
9. The key to obtaining the most accurate handshake position estimates is the conditions applied during the route fitting process. These conditions are applied to both the satellite data parameters and to the GSEs. For instance, the BTORs and BFORs corresponding the to best-fit positions and ground speeds must satisfy numerous statistical requirements based on the expected BTO/BFO reading errors as well as on the correlation coefficients of the BTORs and BFORs. In addition, the (mean-removed) GSEs themselves are expected to be small (< 1 knot) and slowly varying with time (< ~ 1/2 knot/hr).
10. The benefit of allowing for these expected GSEs is the ability to remove systematic errors in the flight model so that the BTORs and BFORs are not contaminated by them. That is, one can synthesize small systematic (differential) speed errors which move the handshake positions by small distances along the route (typically up to a NM), and by doing so obtain uncorrelated BTORs and BFORs which are consistent with their respective reading errors (when the route parameters are otherwise correct).
11. Of course, these best-fit GSEs are equivalent to a second set of predicted lat/lon positions along the track. Each GSE therefore corresponds to a value of the "Along-Track Position Error", or ATPE, which is the difference between the best-fit position and the predicted position using the (interpolated but uncorrected) GDAS weather data. One could in principle fit the ATPEs instead of the GSEs. I use the GSEs because they are primarily caused by errors in the GDAS database, and those weather parameter errors are most directly converted to speed errors rather than range errors.
I hope this explanation helps in understanding why and how the GSEs can lead to improved route discrimination.
@Sid Bennett,
My calculations for a LNAV 186 route show that there is inadequate fuel, even assuming the Air Packs were off from 17:30 until MEFE. I get 488 knots average ground speed, but the headwinds require 492 KTAS, which is M0.84 at FL360. The average delta SAT is +9 C, which substantially increases the required fuel flow.
@DrB
Yes this helps, thank you! However, for full understanding of the procedure, I’m afraid I need to ask if you could explain how the route fitter works / if you could remind me of reference for that.
A second question is if the “aircraft flight model” also “navigates” or that it follows the track produced by the route fitter.
@Niels,
You asked: “I’m afraid I need to ask if you could explain how the route fitter works / if you could remind me of reference for that.”
My route fitter varies parameters to optimize a route by minimizing an objective function. The objective function is the sum of up to about 30 terms (not all of which are used simultaneously) which are figures of merit, each having an ideal value of zero when the fit is a perfect match to expectations. Thus the route fitter simply varies the parameters in such a way as to minimize the objective function. I use the function SOLVER in EXCEL, which is probably a variation of the Runge-Kutta method. SOLVER is far from perfect. It has some significant deficiencies, and usually it is necessary to perform the optimization in several steps with different objective functions. Unfortunately, this cannot be automated in SOLVER, so there a lot of manual interaction required for each case being fitted. In addition, in order to reduce the chances of locking onto a local minimum which is not the global minimum, good starting conditions (i.e., educated guesses for the parameter values) are necessary. That provides a trajectory which can reach the global minimum. In other words, you can’t put in arbitrary starting values and expect SOLVER to find the global minimum. Doing this effectively takes practice as well as an understanding of the dependencies of the various parameters (which are not all independent).
As I have discussed previously, the route is defined by seven parameters. Some of those, such as the speed mode and the lateral navigation mode, are not suitable for variation by SOLVER. Those modes are assumed, and multiple route fits are required to evaluate different speed and navigation modes.
The route fitter generally optimizes a combination of route parameters as well as leg and other parameters. For instance, when fitting a LNAV route at a given (assumed) speed and bearing, I typically vary the following:
1. Flight level
2. Fuel Flow Factor
3. 19:41 latitude
4. 19:41 longitude
5. Range from 19:41 to 20:41
6. Range from 20:41 to 21:41
7. Range from 22:41 to 00:11
8. Range from 00:11 to 00:19
9. Start time of first leg (prior to 19:41, using an assumed starting latitude)
10. Start longitude
11. 00:19 ROD
The outputs of the route fitter, after convergence, are the lat/lons and ground speeds at each handshake time plus a host of statistical parameters which quantify the goodness of fit and the probability that this route is the true route.
You also asked: “A second question is if the “aircraft flight model” also “navigates” or that it follows the track produced by the route fitter.”
The aircraft flight model used in the route fitter has several modules. Its function is to determine the 4-D trajectory of the aircraft given a set of route parameters (and taking into account meteorological conditions). One module finds points (i.e., lat/lon pairs) along the aircraft track. Normally it determines a second aircraft position at a given range and bearing from a first position. The second position will depend, of course, on the lateral navigation method. This is done for each leg (and also at numerous points within each leg). For LNAV the tracks are great circles (geodesics), and the Vincenty iterative formulas are used for ultimate accuracy (~ 1 mm). Since the aircraft track after 00:11 is highly uncertain, I simply extend the track until it reaches the 7th Arc at 00:19. That penultimate position is forced to lie exactly on the 7th Arc where the extended track crosses the Arc. I also add a leg prior to 19:41, again by simply extending the track northward (i.e., in reverse time). That allows the identification of any waypoint that might have been used as the beginning of the southbound route (i.e., where the FMT occurred). So, I use a total of 6 legs from circa 19:00 to 00:19, with 4 legs between the handshakes at 19:41 and 00:11.
The aircraft flight model also predicts the air speed (generally in Mach but in some cases in KCAS) as a function of the speed mode, aircraft weight, and flight level (using when appropriate the Boeing tables for standard speed modes).
@Niels,
I made a screenshot of my EXCEL route fitter. It may help to convey not only the complexity but also the effort which has gone into its development.
You can get it HERE .
@DrB
Thank you for the further explanation. As the aircraft flight model is part of the route fitting procedure, my question regarding the origin of GSE boils down to the point 1 in your yesterday explanation. Isn’t the pair of lat/lon positions used for calculating the leg average GS, effectively determined by integration of the predicted ground speed form the aircraft flight model?
@DrB
I saw the screenshot. It indeed gives some idea of the impressive ongoing effort by you and some others here.
It also illustrates well why it could take a while to write out the methods used and results produced in sufficient detail to make further in depth discussion possible.
@DrB
Apart from the fuel consumption, how does the fit to the satellite data fare?
@Niels: I think about the GSE in this way:
The average groundspeed for a leg (between two handshakes) can be adjusted by the GSE in a way to reduce the ending BTOR of a leg to an arbitrarily low number (by essentially altering the position at the end of the leg). However, by incorporating the expected statistics of the GSEs, along with other statistical parameters, into the objective function, the BTORs for a hypothetical path are in general not zero.
@VictorI, DrB
The possible problem I see is in the way the GSE is calculated. I’ll share a 2D-example I was discussing yesterday with Richard. It illustrates that the leg average groundspeed and average of the 1-minute local groundspeeds would only differ through a “discretization” error. Perhaps my understanding of the way the calculations are actually carried out is incorrect.
https://www.dropbox.com/s/36c4ks77gxhsz5o/20190824_211248%20%281%29.jpg?dl=0
@Niels,
You asked: “Isn’t the pair of lat/lon positions used for calculating the leg average GS, effectively determined by integration of the predicted ground speed form the aircraft flight model?”
Not exactly. You can’t get a pair of positions from a predicted leg average ground speed. If you assume the first position, then you can predict the second position knowing the bearing and the range (which is equal to the predicted leg average ground speed times the leg duration).
There are, in effect, two end positions for each leg. One is the predicted position using the predicted leg average ground speed with zero ground speed error. The second one is the “best-fit” position, which differs in range along the track by the GSE times the leg duration. They are generally close together, within a NM or thereabouts, for the best route fits.
As Victor said above, the ideal BTORs are not zero. They are instead distributed consistently with the expected BTO reading error (29 microseconds standard deviation with a zero mean). So BTOR sigmas greater than 29 and less than 29 are both not ideal, resulting in lower probability estimates.
By the way, use of the GSEs is not necessary to identify Regions of Interest where the BTORs and BFORs are appropriately small. The GSEs do allow quantitative assessments and optimization of the statistical parameters, especially the correlation coefficients, and this leads to more effective route discrimination.
@Niels,
Your example is not comparing the same two ground speeds as I do.
Think of it this way. First I assume a starting position – call it Po. Then I predict the average ground speed for the next leg. That allows me to then predict the end position of this leg – call it P1. Now P1 assumes perfect knowledge and modeling of the speed mode was used, and it also assume perfect knowledge of the temperature and wind vector along the leg. We can’t know all those parameters with 100% accuracy. The combined speed error of this imperfect knowledge is the Ground Speed Error (GSE). The GSE times the leg duration produces an along-track position error (ATPE). Now the ATPE is the difference along the track between the true end position (call it P2) and the predicted position P1. What the route fitter does is estimate the true position P2, while applying certain conditions. One condition is that P2 must be close to P1, because we know the GSE is typically small (about a knot over an hour, so a typical ATPE is a NM). Another condition is that the probability estimated from the statistical parameters is maximized. That means P2 is more consistent with the expected statistics of the true route than is P1. So, what the route fitter does is find a set of P2’s that are close to the P1’s but have a higher probability. The probability is higher because the systematic errors introduced into the BTORs and BFORs by the errors in the predicted ground speeds (mostly due to GDAS errors) are minimized. This allows a better (i.e., unbiased) determination of the probability that the fitted route is the true route.
@Sid Bennett,
You asked: “Apart from the fuel consumption, how does the fit to the satellite data fare?”
You can see all my results for the LNAV 186 route fit HERE .
@DrB
Ok, with a set “P1” and a set “P2” I can see more or less how the formulation of GSEs could work. Is the set “P2” generated “as a whole” by tuning the “initial” route settings?
@Niels,
You asked: “Ok, with a set “P1” and a set “P2” I can see more or less how the formulation of GSEs could work. Is the set “P2” generated “as a whole” by tuning the “initial” route settings?”
No. The P2’s are found individually by fitting the 19:41 lat/lon and the ranges for the 4 legs between handshakes, given the assumed route parameters. One can fit the flight level simultaneously with the leg ranges, but generally I fit them separately.
I don’t fit the GSEs directly. I fit the leg ranges, which then give me the average best-fit leg ground speeds between the Po’s and the P2’s. Then I compute the GSEs using the predicted ground speeds and the best-fit ground speeds. So, the GSEs are an output of the fit, and I apply conditions on the GSEs which must be satisfied by the best-fit P2’s.
@DrB
Thank you, I’ll take some time to let it sink in.
I am/was thinking about a rather simple procedure, which may be helpful for a first more coarse optimization: define a set of “ping” positions P1 by aircraft flight model. A second set P0 by crossing the produced path with the arcs at chosen FL. Then define ATPEs and GSEs accordingly and use that info for optimization of initial position and FL.
@DrB
I admit that I am lost in understanding the logic of the calculation method, although I am aware of the general direction.
I suppose many other observers of this blog feel the same.
Could you make a flow chart for us, in which we could identify what is the assumption, constant, parameter, variable, iteration loop and calculation result.
If you don’t have enough time, forget it. The most important thing is to find MH370. I wish you good luck.
@Niels,
What you are proposing is to find the GSEs corresponding to zero BTORs. One can do that, but those GSEs are rather large. It is also unnecessary to do that to find a reasonable guess for the 19:41 position and the flight level. What I do is simply solve for those 3 parameters using the predicted positions while minimizing the RMS of the BTORs (it does not go to zero). That gives a good guess that is then used as the starting condition for the next fit which maximizes the probability while maintaining the conditions on the GSEs.
Back to basics serious question for Bobby, Victor and Richard:
As acknowledged by all of us a long time ago, the MH370 “problem” is fundamentally ill posed. Some bounds and additional constraints can be safely assumed, but not enough to find a unique solution (POI). So, in the present work effort, how do you overcome this fundamental issue? Are not all the newly added equations exploiting residuals, etc. somehow dependent equations? I would really like to understand the logic behind the math here.
@DrB
Thank you very much for providing your calculations for the 186T path. I did some comparison of the location of the plane at 19:41 and found that my location was slightly different, as one might expect since I started at IGOGU at 18:40.
So, I re-ran Barry’s spread sheet starting at your start location and achieved an excellent match (at .831 and 35kft). The differences in errors are sufficiently small as to be ignored. The TAS at 19:41 is 490.3. So there are slight differences in the met models. I don’t see that as an issue at this point in comparing results.
So, the only question is fuel consumption and I have no idea what the optimum combination of M and altitude, yielding a TAS of about 491 would be.
@Victor
Mike has asked a serious question here when he said:
“Back to basics serious question for Bobby, Victor and Richard:
As acknowledged by all of us a long time ago, the MH370 “problem” is fundamentally ill posed. Some bounds and additional constraints can be safely assumed, but not enough to find a unique solution (POI). So, in the present work effort, how do you overcome this fundamental issue? Are not all the newly added equations exploiting residuals, etc. somehow dependent equations? I would really like to understand the logic behind the math here.”
Your last post was in June. Many have stuck with the analysis, yourself, Bobby, Richard, Don, Steve, Andrew, Mike, Edward and others…. The MH16 data was fascinating and I had not been aware of it until recent weeks.
Perhaps a time for a summary, Victor, of where we are, and how far we are from some broad consensus and future proposal for a third search. That is clearly what Ocean Infinity need and likely not going to happen until 2020.
In other words, is there actually something compelling over recent months that could in theory be presented as a search proposal via OI to the Malaysia authorities?
@Sid Bennett,
Regarding the LNAV 186 route, you said: “So, the only question is fuel consumption and I have no idea what the optimum combination of M and altitude, yielding a TAS of about 491 would be.”
I have already done that. The solution I presented has the highest overall probability, including the fuel probability. So, the speed mode and flight level I presented are already optimized. That route is inconsistent with the fuel on board, even allowing for the possibility that the aircraft was depressurized the whole time from ~17:30 until MEFE.
@airlandseaman,
You said: “As acknowledged by all of us a long time ago, the MH370 “problem” is fundamentally ill posed. Some bounds and additional constraints can be safely assumed, but not enough to find a unique solution (POI). So, in the present work effort, how do you overcome this fundamental issue?”
I believe there is sufficient information to demonstrate a unique solution exists. No one has proven there cannot be a unique solution. Oh wait! I almost forgot that DennisW said there must not be one because he couldn’t find it! Ignoring that “proof” for the moment, first you should recall that no one, up to now, has actually used ALL the available information. For instance, DSTG did a reasonable job of finding a probability density distribution on the 7th Arc, but they ignored two important pieces of information. First, they ignored the fuel consumption and the corresponding endurance for each trial route. Several of us are doing very accurate fuel flow modeling, and this allows us to reject some routes which are simply not flyable because either there is too much or too little fuel. There is a zone between 33S and about 36S wherein the endurance matches the known MEFE time within the accuracy of the fuel model predictions (about 1% 1 sigma). That helps a lot in rejecting some Regions of Interest which have fairly good matches to the BTOs and BFOs. The second significant improvement is the use of additional (independent) statistics, particularly correlation coefficients. We know that both the BTO and the BFO reading errors are uncorrelated with each other and with all other route parameters, such as time and the GDAS errors which cause predicted ground speed errors (GSEs). In fact, for LNAV routes, the number of available and independent data statistics is increased from 3 to 9. The much larger number of statistics that are now used as conditions on the route fit also allows additional parameters (the 4 GSEs) to be determined. The use of the GSEs is the third improvement, because it allows the unknown GDAS differential meteorological errors to be compensated so that the handshake locations are determined more accurately than is otherwise possible. Taken together, these three improvements result in a substantial increase in route selectivity.
It is no coincidence that each of the following metrics is optimum (within the expected noise and sampling errors) with a LNAV 180 route through BEDAX, ending at 34.3S:
1. the highest probability of consistency with the BTOR statistics,
2. the smallest BFOR 1-hour Allen Deviation,
3. the closest endurance match to MEFE at 00:17:30, and
4. the highest probability peak in the debris drift studies by Griffin and others.
@ALSM
I was thinking IG was automatically committed to 34.5 for some reason unknown to me.
In my mind, there could be 2 possible explanations(a) technical or (b) political. Technical would be some evidence MH370 was actually there, that I am so far failing to see (possibly because IG has some info that I do not have). Political would be complete speculation, but for example I could envision maybe OI or Australia wanted to go back there for some reason (say for publicity or sea bottom mapping etc.).
@airlandseaman
You stated “As acknowledged by all of us a long time ago, the MH370 “problem” is fundamentally ill posed. Some bounds and additional constraints can be safely assumed, but not enough to find a unique solution (POI). So, in the present work effort, how do you overcome this fundamental issue? Are not all the newly added equations exploiting residuals, etc. somehow dependent equations? I would really like to understand the logic behind the math here.”
I agree that the MH370 problem is ill posed, in that the solution’s behaviour changes continuously with the initial conditions. That does not mean that a solution does not exist or that a solution cannot be unique.
Mike, I would really like to understand the logic and/or mathematics behind your conclusion that there are insufficient bounds and additional constraints to find an unique solution. I agree that certain data is being withheld by the Malaysians, ATSB and DSTG, for example the data on 9M-MRO from previous flights or the radar data from military sources covering the earlier part of the MH370 flight, but how do you conclude that the data we have is insufficient?
Bobby, Victor and I have found an unique solution by using the aircraft performance data, fuel data, satellite data, weather data and drift data. All these data sets only have a certain precision and the drift data is the least precise. But all these datasets taken together and within the limits of their individual precisions, show a complete picture. We also know that there is no scientific reason why all these datasets should be highly correlated. Bobby has done an excellent job in exploiting this fact and defining additional statistical criteria that we can apply. We have also analysed MH371 the previous flight of 9M-MRO from Beijing to Kuala Lumpur as well as flight MH16 by a sister aircraft of 9M-MRO from Kuala Lumpur to Amsterdam which occurred at the same time as MH370 and was connected to the same satellite as MH370. This has confirmed our understanding of the precision of the various datasets.
Analysts often point out, that such an analysis of an unique solution is only as good as the assumptions that are made. We have made 2 major assumptions. It is generally accepted that the last known position of MH370 is somewhere near flight route N571 between waypoint MEKAR and waypoint NILAM, as inferred by the Malaysian military radar trace and Inmarsat satellite data between 18:25:27.421 UTC and 18:28:14.904 UTC. It is also generally accepted that the MH370 end point is somewhere in the SIO, based on the Inmarsat satellite data between 19:41:02.960 UTC and 00:10:59.928 UTC and the discovery of 20 items of debris, which are either confirmed or likely from MH370. We have not assumed a start time for the trajectory southwards, nor a start latitude or longitude, nor an initial bearing, nor a flight level, nor a navigation mode, nor a speed mode.
I agree that I have only investigated around 1,000 flight paths with an inactive pilot. I have only investigated 20 flight paths with an active pilot proposed by other analysts on this blog, where there were changes in track, speed and/or flight level, but a flight path with an active pilot still has to conform to the aircraft performance data, fuel data, satellite data, weather data and drift data. Meanwhile the wide area scans performed by Bobby and myself cover all possible MH370 end points in all directions and within the limits of fuel range, fuel endurance, tail winds, ∂ISA-SAT as well as fuel savings due to IDG load shedding or Air Packs being switched off.
When only one flight path sticks out like a sore thumb from years of a comprehensive analysis, then in my view, you are entitled to call it an unique solution.
MH370 flew a LNAV180 LRC FL390 flight path starting close to waypoint BEDAX and ending at around 34.3°S near the 7th Arc.
Thanks All for your fantastic analysis and calculations.
If I may offer a criticism, it is you’re trying too hard to narrow down to accurate parameters. As I think this is possibly an autopilot/autothrottle OFF, passive pilot flight, there are no neatly defined constants.
Is it possible to do a range of calculations where at each arc heading varies by say 20degs, altitude by 10000ft, speed by .1M, (consistent with a/c flying phugoid) and a start point no where near MEKAR ? As I don’t believe the flight up the Straits….made up to fit in with the Lido hotel image.
I suspect this would make any calculations difficult….and that is our problem!
@Tim
You stated “f I may offer a criticism, it is you’re trying too hard to narrow down to accurate parameters. As I think this is possibly an autopilot/autothrottle OFF, passive pilot flight, there are no neatly defined constants.”
Even without autopilot, autothrottle and an active pilot, MH370 still has to conform to aircraft performance data, fuel data, satellite data, weather data and drift data. In your scenario the navigation mode is unknown and the speed mode is unknown, but we have not made assumptions on either of these parameters.
@Tim
An aircraft flying phugoid and varying track, altitude and speed as significantly as you propose will not show a smooth curve BTO vs time and a straight line BFO vs time.
Based on the regular sequence of the satellite data, we make the assumption that during the time interval from 19:41:03 UTC to 00:11:00 UTC, the aircraft was flying with autopilot and autothrottle engaged and with no pilot inputs.
@Mick Rooney asked, In other words, is there actually something compelling over recent months that could in theory be presented as a search proposal via OI to the Malaysia authorities?
In short, yes.
The due south path crossing the 7th arc near 34.3S latitude appears to uniquely satisfy all the criteria. Months ago, OI has asked us to summarize the work in anticipation of a new search proposal, which we did. OI is also working with university researchers on a parallel effort to define a new search area.
I have no idea whether OI has presented a search proposal to Malaysia, whether Malaysia is agreeable to entering into a contract for a new search, and whether OI would consider searching without a contract with Malaysia.
@Richard
“I have tested my flight model against both Bobby’s model and Victor’s model and it matches exactly. Does yours?”
We have implemented Bobby’s model as provided publically by him (we thank him for that by the way) with computation at time intervals of 1sec.
This why your model is posting similar results if corrected for the descent segments of course 🙂
@Jean-Luc
I am not talking about Bobby’s fuel model only, I am talking about Bobby’s complete flight model.
I use a different fuel model to Bobby, but our results are similar.
My criticism of your flight path was another. You have unrealistic speed changes from CM to ECON to KIAS to LRC and unrealistic altitude changes from 32,600 feet to 27,000 feet to 15,000 feet to 10,000 feet to 5,000 feet.
You require a negative ROC at certain handshake times and you time some of the multiple descents to fit the handshakes.
Your model is completely unrealistic and contrived.
Bobby & Richard: Don’t misunderstand. I’m not challenging the work. I’m trying to understand it. I’ve been impressed by the recent model advancements and I have supported S34.3 as a good place to search next. To the 4 metrics Bobby listed above, I would add a 5th (independent) reason for S34.3: Given everything else we know, pointing the plane to the SP makes a lot of intuitive piloting sense.
My confusion stems from my understanding that the problem is fundamentally ill posed (as Richard confirmed again) AND yet it is now suggested that more independent equations have been formulated allowing the problem to be “solved”. Bobby states: “The second significant improvement is the use of additional (independent) statistics, particularly correlation coefficients.” I guess I am having difficulty understanding how (new) statistics derived from any of the existing variables are truly independent of everything else.
Let me hasten to acknowledge that the new statistics can certainly add important clues, if not certainty, thus my support for S34.3.
@victor
@Richard
@DrB
Here are some reasons I don’t feel like there can be a unique solution
(1) BFO/OCXO drift
Sounds like from Richard’s recent paper, we should be expecting 3-4 units BFO drift over the flight. If that is true, that implies ATSB and everyone else has not been incorporating this correction factor. I am thinking a few numbers BFO drift is quite a few miles shift (easterly) in the sweet spot.
(2) Lack of hourly BTO data between ARC5 and ARC6
Seems to me we might conclude that Arc3 to Arc5 might be approximately straight and constant. We are already (in the posts above) negotiating what “passive” means? Some speed/altitude changes after Arc2? Unfort by the time we get to Arc6, seems to me we have, to some extent, lost the bread crumb trail due to the loss of BTO data at 23:41 due to the 23:14 sat call
(3) Arc2 BFO
Could be maneuvers still happening at Arc2, so including that Arc in the model predisposes the model to favor paths with a closer match to Arc2 BFO, but close match to Arc2 BFO is shakey as a path determinator.
Then there are other less technical concerns, if there is a “golden path”, then you should be able tell is what it is, and we should be able to verify that for ourselves.
@Richard,
I do not pretend to understand the maths involved here, but if the CAPTIO team can make their rather contrived route and altitudes fit, then, I sure there are random phugoid flight path’s that might also make a good enough fit.
@airlsandseaman,
You said: ” To the 4 metrics Bobby listed above, I would add a 5th (independent) reason for S34.3: Given everything else we know, pointing the plane to the SP makes a lot of intuitive piloting sense.”
Roger that. I would also add a sixth: The best-fit track passes within 1/2 NM of a waypoint (BEDAX). The list is growing.
You also said: “I guess I am having difficulty understanding how (new) statistics derived from any of the existing variables are truly independent of everything else.”
First, there are 4 NEW variables (the GSEs for the 4 legs), and their statistics are independent of the BTOs/BFOs. Second, just because a new statistic, such as a correlation coefficient, uses the BTORs, does not mean it is not independent of the statistics of the BTORs we have been using. For instance, the correlation coefficient is independent of the variances of both variables, so there is no dependence of the correlation coefficient on the standard deviation of the BTORs (or on the mean BTOR, either).
@Tim
Please go hunt. It will not take long to find 100 CAPTIO-like flight paths out of the several million possibilities.
A question about waypoints:
Would it in principle have been possible that a manual waypoint was entered?
As a further variation on my “Case C” was thinking about a great circle path from turn south around N8E93.5 to S40E95 or S45E95
Absent a detailed (fully computed) flight model prior to ISBIX for at turn to 180T at AGEGA, I constructed one following Richard’s hints, not including the needed altitude change at 18:40. Effectively, I ignored the BFO measurement at the first phone call since it can be associated with a descent at that time. The FMT is at 18:51:15 and the total path length from NILAM to 00:19:30 is 2811 nmi.
This compares with a similar path from NILAM to IGOGU with the turn to 186T at 18:41, for which the first phone call is fortuitously at the FMT and has a total path length from NILAM of 2861 nmi. This is the IG solution.
Both paths were computed with a constant M and a constant FL and GCP navigation and have acceptable residuals. Both have the attributes of having minimal assumptions to supplement the satellite data.
I do not provide either a FL or M as each model has its own met model and you should be able to find a comparable solution.
As for the other paths that have been proposed, unless a plausible (simple)complete path can be proposed, they should be given much less weight in any consideration of where to search.
If there is any hope of finding the plane,absent new evidence,we must assume a simple solution.
@all,
So, is it true to say that if the autopilot is off it is impossible to calculate a possible route ? This might be our problem with determining and finding an end point.
@Tim
You asked “So, is it true to say that if the autopilot is off it is impossible to calculate a possible route ?”
No! What I stated yesterday to you was “It will not take long to find 100 CAPTIO-like flight paths out of the several million possibilities.” What I meant was, if the track, altitude and speed are allowed to vary without any constraints, then you can quickly find a large number of flight paths, that fit the satellite data. Autopilot and auto throttle off implies to me, that there are no constraints on track, altitude and speed.
@Sid Bennett
Why do you think a LNAV180 LRC FL390 from waypoint BEDAX to the South Pole is not a “Simple Solution”?
Why do you think a LNAV180 LRC FL390 from waypoint BEDAX to the South Pole coupled to a flight path from waypoint NILAM via waypoint AGEGA with a descent to FL270 is not a “Complete Solution”?
@Niels asked: Would it in principle have been possible that a manual waypoint was entered?
Operationally, it is trivial. However, even if you limit the inputs to integer latitudes and longitudes, you can find a “distant” waypoint that nearly aligns with just about any great circle path.
@Sid Bennett
You falsely and misleadingly claim that your 186 degT flight Path “is the IG solution”.
This “was” the IG solution, might be more accurate.
The IG publication you refer to, is from 2014 and now 5 years out of date.
Meanwhile, there is no consensus for a 186 degT flight path amongst the IG.
Please see recent comments from Victor, Mike, Don and myself on this web site. Not to mention emails that I have received from Duncan, Brian and other IG members.
Re: Passive Paths
I tend to agree 180 South is the only “passive” flight path that might fit.
38 South (186T) is “dead end” option, I am thinking, due to fuel shortage, but also does not fit the BFO data if we imagine some drift in BFO values. Therefore 38 South advocates morph into 35 South advocates, if they can be open-minded enough to shift their thinking 3 degs east.
However, I tend to feel MH370 perhaps actually went over to 29-32 South, which I am thinking is very good, perhaps best data fit, but you cannot get there passively.
All of the above stated with humility as we have not had much luck predicting path so far.
According to this article, at the invitation of “the Australians”, there are three university groups that have been asked to help find MH370: one in Sweden at Linköping University, one in the UK, and one in Finland. (I suspect “the Australians” refers to the DSTG.) The Swedes expect to publish a report as early as October 1, 2019.
@Richard
You are overreacting to my suggestions.
The post you commented on acknowledged that AGEGA+180 IS a complete solution. I am assuming the the descent was observed by the first phone call BFO and any subsequent climb was simply not observed. I assume that the duration of the flight path at FL270 is consistent with the fuel analysis.
I have not studied the BEDAX solution, but will look at it and comment as soon as I can.
BOTH the 180 and 186 solutions have the disadvantage that they have been previously searched. That is why, when they are searched again, the glide scenario needs to be included.
I am told that there is insufficient fuel to reach the 37.5 location, but I do not have any quantitative information. (e.g., Path length from NILAM and the amount of the shortfall.)
@TBill
What most of the discussion of BFO errors lacks is consideration of the complete path. The path from at least the FMT (IGOGU, AGEGA, BEDAX) needs to be considered. This constrains the ground speed (a function of M and FL)and the resultant BFO errors.
In the past month this thread has gone from entirely discounting the BFO data to a very granular treatment. A temperature-controlled oscillator of this type, when operating at a stable temperature would not be expected to drift over 5 hrs. (For the sake of simplicity, I have accepted that the drift is entirely due to the on-board oscillator).
airsealandman is the expert on this and I would welcome a comment.
@VictorI
Regarding the “manual” waypoints.
My Case C “best fit” result is indicative for a flight path, LRC and FL around 340, bending slightly eastwards and crossing the 7th arc around S33.7. The question I’m addressing if there exists an automated navigational setting leading to a path close to the “Case C” path and with excellent fit to the data.
The S40E95 is “inspired” on (is near to) EKUTA. The potential problem with a path N8E93.5 to S40E95 is that it may be a bit too far east in the BEBIM area. That’s how I arrived at S45E95. Both have to be tested.
I’m currently still focusing on optimization of the AGEGA – ISBIX – BEBIM -EKUTA path, with a possible next step looking at BEDAX – BEBIM – EKUTA.
Meanwhile I’m trying to expand my path estimator tool such that it can also be used to fit to / estimate parameters for arbitrary great circle routes.
Sid: Re: BFO drift…
I can’t really add anything new on the subject. All BFO values are subject to OCXO drift error (short, medium and long term). That error was large and changing rapidly around 18:25-18:28, but probably <5 Hz after 19:00, based in part on data from MH16 and other evidence. OCXO related error at 00:19:29-00:19:37 was probably much smaller than at 18:25:37 due to the short time the power was off (~1 minute vs. 1 hour). The error at that time was certainly very small compared to the vertical speed signal, so not significant. BFO values also have some random measurement error OTOO 1Hz and SDU compensation algorithm error, probably also OTOO 1Hz. The latter 2 are random.
@airsealandman
Thanks for your comments.
Over the past few years I have occasionally worried about the 150Hz offset used by Inmarsat et al. and came to the conclusion that it was a value that they felt was appropriate as an average value in interpreting their results. I wish they had not rounded it so much….
After a while I settled on a slightly different value, within your 5Hz bound. No estimate is definitive, but I have used the same offset in comparing results for different scenarios so as to avoid the variable constant effect.
Sid: re “…it [the BFO Bias] was a value [150 Hz] that they felt was appropriate as an average value…”.
I’m not sure what you mean by “…they felt was appropriate…”. Recall, the BFO Bias was calibrated on the ground at KL and validated in the air on the way to IGARI. Many of us have verified the value(s). Here is an old summary of the effort to calibrate the BFO Bias: http://bit.ly/2LaHqTq
@Greg,
You said: “I admit that I am lost in understanding the logic of the calculation method, although I am aware of the general direction. I suppose many other observers of this blog feel the same. Could you make a flow chart for us, in which we could identify what is the assumption, constant, parameter, variable, iteration loop and calculation result.”
Here is the step-by-step route fitter information you requested in a recipe format:
NOTES:
a. 7 Route Parameters define the 19:41-00:11 route (4 are assumed, and 3 are fitted:
Assumed:
– Initial Time (i.e., 19:41)
– Lateral Navigation Method
– Initial Bearing
– Speed Mode
Fitted:
– 19:41 Latitude
– 19:41 Longitude
– Flight Level
b. BTOR = Best-fit BTO residual = Predicted BTO – Observed BTO
c. BFOR = Best-fit BFO residual = Predicted BFO – Observed BFO
d. Fisher’s probability estimator of route correctness is based on 9 statistics (for LNAV):
– Mean BTOR
– Standard Deviation BTOR
– RMS BFOR
– Correlation coefficient of leg start BTOR to leg end BTOR
– Correlation coefficient of leg start BFOR to leg end BFOR
– Correlation coefficient of BTOR to time
– Correlation coefficient of BTOR to ATPE (ATPE = Along-Track Position Error = GSE X Duration)
– Correlation coefficient of BFOR to time
– Correlation coefficient of BTOR to BFOR
e. For non-LNAV lateral navigation methods, there are four additional fitted variables (effectively the average bearing errors for each of the 4 legs), which are the Cross-Track Position Errors (XTPEs) at the leg ends w.r.t. the nominal route.
f. For non-LNAV methods, there are two additional correlation coefficients (for a total of 11 statistics used in the Fisher probability estimator):
– Correlation coefficient of BTOR to Cross-Track Position Error (XTPE)
– Correlation coefficient of ATPE to XTPE
1. STEP #1 (Assume 4 out of 7 route parameters and fit 3)
a. Set initial time = 19:41
b. Select lateral navigation method (LNAV, CTT, CMT, CTH, or CMH)
c. Select speed mode (LRC, ECON with CI=52, MRC, M0.85, M0.84, M0.83, M0.82, constant MACH, or constant KIAS)
d. Select initial bearing at 19:41 (degree True or degrees Magnetic, as appropriate)
e. Once a Region of Interest (ROI) has been identified, one can fit the bearing, if desired, in the later steps. In addition, different speed modes may be evaluated to determine which one has the highest Fuel Probability or the highest Overall Probability
2. STEP #2 (Determine initial guesses for key parameters, including 4 fitted route parameters, corresponding handshake positions, and Fuel Flow Factor)
a. Fitted Variables:
– 19:41 Latitude
– 19:41 Longitude
– Flight Level
– Range from 19:41 to 20:41
– Range from 20:41 to 21:41
– Range from 21:41 to 22:41
– Range from 22:41 to 00:11
– Fuel Flow Factor, or FFF (average of both engines; similar to engine PDA, but includes both engine and airframe effects on fuel flow; nominally 1.5% for 9M-MRO in cruise)
b. Objective Function Constraints:
Priority #1: BTORs = 0
Priority #2: Predicted MEFE = 00:17:30
Priority #3: Minimize RMS GSEs
c. Results: 7 route parameters (4 assumed and 3 fitted), 4 additional handshake lat/lon locations, and FFF (total of 12 independent assumed/fitted variables)
3. STEP #3 (Find best-fit handshake locations along the nominal track to maximize probability)
a. Fitted Variables: Same as STEP #2a
b. Objective Function Constraints (different than STEP #2b):
Priority #1: GSE constraints applied to 4 legs from 19:41-00:11 [magnitude < 1 kt, magnitude of slope < 0.5 kt/hr ]
Priority #2: Predicted MEFE = 00:17:30
Priority #3: Maximize Overall Probability = Fuel Probability X Fisher's Probability of route correctness based on 9 statistics involving BTORs, BFORs, GSEs, and time
c. Results: Same parameters as STEP #2c
4. STEP #4 (Fit two new legs: a preceding leg ending at 19:41 and a following leg from 00:11-00:19)
a. Select start latitude (north of 19:41 latitude; can be a particular waypoint latitude) and fit start time (or select start time and fit latitude)
b. Assume 00:11-00:19 leg continues along selected route and ends exactly on 00:19 Arc
c. Fitted Variables:
– Start time (prior to 19:41)
– Start longitude (to fall exactly on nominal track)
– Range from 00:11 to 00:19
– Rate of Descent (ROD) at 00:19 (to exactly match BFO then)
d. Objective Function Constraints:
Priority #1: GSE constraints now applied to first 5 legs (from Start Time to 00:11): [magnitude < 1 kt, magnitude of slope 0.999) ]
Priority #2: Lateral navigation error = 0 for preceding leg from Start Time to 19:41 (i.e., Start Position is exactly on nominal route)
Priority #3: Magnitude of BTOR at 00:19 < 1 microsecond (i.e., 00:19 position is exactly on 7th Arc)
Priority #4: BFOR at 00:19 < 1 Hz
e. Results: Parameters completely defining all 6 legs from Start Time to 00:19 (total of 16 independent variables)
5. STEP #5 (Final fit of all parameters)
a. Fitted Variables (same 12 as STEP #2a plus STEP #4c):
– 19:41 Latitude
– 19:41 Longitude
– Flight Level
– Range from 19:41 to 20:41
– Range from 20:41 to 21:41
– Range from 21:41 to 22:41
– Range from 22:41 to 00:11
– Fuel Flow Factor
– Start time (prior to 19:41)
– Start longitude
– Range from 00:11 to 00:19
– ROD at 00:19 (to match BFO then)
b. Objective Function Constraints:
Priority #1: GSE constraints applied to first 5 legs (from Start Time to 00:11): [magnitude < 1 kt, magnitude of slope 0.999) ]
Priority #2: Lateral navigation error = 0 for preceding leg from Start Time to 19:41 (i.e., Start Position is exactly on nominal route)
Priority #3: Magnitude of BTOR at 00:19 < 1 microsecond (i.e., 00:19 position is exactly on 7th Arc)
Priority #4: BFOR at 00:19 < 1 Hz
Priority #5: MEFE at 00:17:30
Priority #1: Maximize Overall Probability
c. Results: 16 Parameters defining all 6 legs from Start Time to 00:19, 00:19 ROD, & FFF, plus Fuel Probability, Fisher Probability, and Overall Probability
To explain further, consider the ground speed errors (GSEs), which are the differences between the leg average ground speed calculated using the best-fit start/end handshake positions and the predicted leg average ground speed using the aircraft flight model and the GDAS meteorological conditions. When the route is first fitted so that the BTORs are zero (i.e., when the handshake locations are exactly on the arcs), the GSEs are generally the largest. In this case they comprise three components: (1) the GDAS differential speed errors, (2) the systematic route errors, and (3) the random BTO reading errors.
When the route is next fitted with the goal to produce random BTORs consistent with the BTO reading errors, the GSEs then contain the first two components – the systematic route errors and the unknown GDAS differential speed errors. One could use the GSE magnitude (for instance the RMS value) as a figure of merit (FOM), and then find the route parameters which minimized the GSEs. However, there is a hidden assumption in that method, that the minimum GSE occurs when the systematic route error term is zero (i.e., when the route is correct). This may not always be true, since both the route errors and the GDAS speed errors may be systematic and might effectively cancel each other leaving a small sum even when both terms are not that small.
To avoid this case, and for other reasons, the method I use is slightly different. I require the GSEs to be small and smoothly varying, as one would expect for the true route (since both the air temperature and the U,V winds in the GDAS database are quite smoothly varying along a route). With that constraint of small and smoothly varying GSEs, I find the handshake locations which yield BTORs most consistent with the uncorrelated BTO reading noise (as well as a number of other similar statistics). Then I estimate the probability that the null hypothesis (i.e., that the route is correct) is true for all of the statistics. This method avoids the possibility of a false result if the systematic route errors happened to cancel the systematic GDAS speed errors. Thus, in my method, the GSEs are forced to be small, but the highest probability of being the true route does not necessarily occur when the GSEs are the smallest.
My method also has the advantage that a standard statistical method may be used to estimate the probability that the null hypothesis is true (i.e., that the route is correct), using 9 statistics. In addition, I use a random BTOR/BFOR data generator to test my code with a very large number of trials to confirm that the probability estimator is accurate.
So, my experience in trying various figures of merit for route fitting has demonstrated that applying certain constraints on the BTORs, BFORs, and GSEs allows one to improve the accuracy of the best-fit handshake locations. This, in turn, plus the additional correlation statistics, allows a precise quantitative assessment of the probability that the route is correct. This, in turn, allows incorrect routes to be discriminated. Significant additional discrimination is also provided by an accurate fuel model, so routes with incorrect endurance may be rejected. The combination demonstrates that a single route is most probable, and this route is also the one most consistent with debris drift predictions.
@Victor
Re: the university approach, that is interesting and might be productive to pick some “random” areas to search. OK but that could be a little like what I surmised a few days ago, the Australia and/or OI had an agenda to search more for PR reasons etc.
Here is a thought experiment- if we had a hunch or clue that we actually might know where MH370 was resting, would Malaysia allow a search? No way, is my first thought.
@TBill asked: Here is a thought experiment- if we had a hunch or clue that we actually might know where MH370 was resting, would Malaysia allow a search? No way, is my first thought.
I think if several groups independently performed credible analyses and arrived at the same area, that could provide the “credible new evidence” that Malaysia requires to resume the search. In fact, we don’t know that the groups will arrive at the same area, and whether or not they do, we don’t know if Malaysia will choose to resume the search. Perhaps OI has insights that we do not.
@TBill,
You said: “Here is a thought experiment- if we had a hunch or clue that we actually might know where MH370 was resting, would Malaysia allow a search? No way, is my first thought.”
I don’t think Malaysia wants to resume a search, and I suspect they will find reasons to justify that inaction. That said, it is not up to Malaysia to “allow” a search. The area is in international waters, and Malaysia cannot prevent anyone from looking there. They can only decide whether or not to pay for it. While OI would certainly like to be paid (if successful), I would not rule out them searching again on their own nickel.
First of all thanks to this new research by Richard, Bobby and Victor. As I understood from the discussion and conclusion the No.1 POI is around 34.4 degrees but has been searched already and the conclusion is, the plane has been missed or did a glide. When I read the paper, I found that the FMT took place somewhere between MEKAR and NILAM and the route with a heading of 180 degree started around 19:23 UTC with the green line in your Figure 7 and this arbitrary longitude line in Figure 3. So from the last Malaysian Lido Radar contact at 18:22 it took 1h and 1min to reach your starting point, right? The bend was about 500 km or 280nm long. Why did the plane take 1h to fly this bend? Before 18:22 it was flying N571 in northwestern direction under possible Indonesian military radar surveillance. Ok, as long it was a blip flying this direction, it could be ok for the Indonesian military, but….. as it turned left some time after 18:22 it became a possible thread to them. Now you will intervene and tell, they were asleep or drinking or something, but the PF couldn‘t be sure about it. If there was a plan taking this plane and made it disappear completely by Shah or someone else, he didn’t do it in the reach of Sabang military radar. In 2014 they didn’t know about Inmarsat and the arcs, I think the FMT took place later and way up north. How far does a T7 fly in an hour at 0,84mach at FL390 doing a curve from N571 to your start point? A year ago we had the discussion with Victor‘s Car Nicobar Cocos Island course.
From 25 degrees on arc7 to the north! nobody has searched this area yet. Still my favourite area.
@airsealandman
Thank you for the reference to the paper. It is quite thorough. But, I had already settled on 154Hz by the time the paper appeared and a particular set of eclipse effects similar to but not identical identical to the Inmarsat linear change model. For consistency I have kept using the same numbers, and did so when I simulated the NILAM+AGEGA+180 path and agreed with Richard’s suggestion of this as an alternative path.
I do not want to engage in a debate with the other readers of this thread about the exact value to use. I recall a comment (by DrB I believe) that it is the spread about the mean rather than the exact mean BFOR that is likely more important.
A random thought…
One of the remaining problems is to connect the early and the late flight paths. I have more or less gone by trying different paths and attempting to gain insight (this being a long process starting with the original FMT).
Thinking in flat earth terms…
If we have two points, the foci of an ellipse, and we want to find out whether any other locations fall on the ellipse, we can define the ellipse by the distance between the foci and by the location of the first trial point. All other points having the same total path length would fall on the ellipse (assuming a simple path and constant speed).
So, for those who are wizards of spherical trig, why not try two cases as a fisat order search:
NILAM+IGOGU+ISIBX and NILAM+AGEGA+ISBIX and lay the curves on a skyvector map.
Has any one done this or something similar?
[running for my storm cellar]
@Sid Bennett,
You said: ” I recall a comment (by DrB I believe) that it is the spread about the mean rather than the exact mean BFOR that is likely more important.”
You are partially correct. What I said was that the mean BFOR was not a particularly useful statistic for route determination (assuming the mean is fairly small).
It is more useful to look at statistics which have zero BFOR as a reference point than at the standard deviation. We have forced the mean BFOR to be zero on the tarmac by choice of BFO bias. That gives a bias value near 150 Hz. I am using 149.86 Hz.
The RMS BFOR is, I think, the best statistic to use with the information publicly available. We know that the RMS of the 20-flight histogram shown by DSTG is 4.3 Hz. That gives us a nominal value for comparison purposes.
The Allen deviation over 1 hour is probably a better statistic in principle. We have 4 BFOs 1 hour apart from 19:41 to 22:41. Then we have a fifth BFO 1.5 hours later. We can approximately “convert” that last BFOR change from 22:41 to 00:11 to a 1-hour duration by knowing that the variance depends on the square root of the time interval. So, I calculate 3 1-hour Allen deviation samples by using the first three BFOR differences, and I scale the 4th difference to approximately correct for the 1.5-hour period instead of 1 hour. Then I find the Allen deviation using the 4 samples. It is useful to look at how the Allen deviation changes with route bearing, but we can’t estimate a probability because we don’t have enough data with roughly 1-hour spacings from prior flights for comparison. It’s too bad Malaysia won’t let DSTG release the BFORs from the 20 prior flights.
@DrB
The Allan variance seems an unlikely statistic to use in a case where the number of samples is 4. The accuracy of the estimate is very poor.
I used the Allan variance for well over a decade in the development of precision fiber optic gyroscopes to identify development problems associated with bias instability and long term drift. That said, the data was only useful when it contained thousands of data points taken over periods of many hours under stable laboratory conditions. For the ARW, a simple RMS value was sufficient,could be obtained in a minute and never lacked accuracy.
The variance depends on sqr rt time only when the noise is Gaussian.
I think this is a side issue.
DrB
Your Step by Step route fitter recipe: Comment-25094 Aug27,2019 10:52 pm
Firstly: Thank you
Secondly: An amazing amount of time must have gone into all your analysis. And compounded by such as: “Unfortunately, this cannot be automated in SOLVER, so there [is] a lot of manual interaction required for each case being fitted.” Refer your earlier comment-25039 Aug25 9:03 am.
Thirdly: In an earlier comment-24994 Aug21 5:55 am – Richard says: “Currently, there are 3 independent models and Bobby, Victor and I do not have the source code of each other’s model.” That approach will be invaluable when you eventually summarise and report on your findings and methods. For instance, from past comments here, Richard has chosen to initiate the route search at (any) arbitrary latitude north of considered likely intersections of the actual route and “Arc 2”. You, as I undestand it, have chosen to initiate the route search at (any) considered arbitrary latitude “on” Arc 2. And your statistical approaches also appear to differ in some respects.
Now: In your comment-25094 Aug27 10:52pm you class Flight Level as a “Fitted” parameter.
I’m not sure why you have classed this as a “Fitted” parameter, or for my purposes I will equate “Fitted” with “Resultant”.
Is not the Flight Level, or the chosen flight level for any particular arbitrary route check, just another “Assumed”, or selected or interated parameter ? Why have you discriminated Flight Level from the other parameters of Lateral Navigation Method, Speed Mode and Initial Bearing ?
Is your reason so that you can fit flight level as you progress through the fourth leg from 22:41 to 00:11 dependent upon the probability that the FEFE (First Engine Fuel Extinction or Flame-Out) may possibly have occurred during this leg and that the aircraft will have begun a slow descent in order to maintain selected aircraft speed ? In this way by generalising the flight level as a fitted variable you may be able to accomodate this more easily in your analysis calculations ?.
This may be akin to or similar to accomodation for actual bearing variation as the flight progresses for some of the lateral navigation methods. ?
New subject or question: For your STEP #2 you say: “(Determine initial guesses for key parameters, including 4 fitted route parameters, corresponding handshake positions, and Fuel Flow Factor)” for which I repeat you say “4 fitted route parameters”.
Your list of “Fitted Variables” includes 19:41 Latitude and Longitude and Flight Level (see above query). Is the Range for each of the four legs from Arcs 2 through 6 your 4th fitted route parameter. ?
@Victor
I agree. The Defence Science and Technology Group didn’t just fade away into the ether. There is clearly a reason why they are still active in the case of MH370 and any assisted study requested for delivery/publication in October required a request/planning/costing over previous months for a reason and from someone. Some guy in Sweden or Finland or the UK didn’t just wake up one morning and think ‘wouldn’t it be a great idea if we did x, y or z’.
@Gerald
Flying a NW track past Sabang radar, to get out of range, is fine in theory, but to what purpose ?
Even if you fly out of range of Sabang radar to the NW, you have to go a long way, because Sabang radar’s coverage to the west and north west is
totally unencumbered by terrain blocking, since there is nothing out there but ocean. At cruise altitudes, you have to go virtually to Canicobar
(VOCX). Regardless of where you actually turn south, you will re-enter Sabang radar coverage on any 180 (approx) Track anyway, irrespective of whether
it is Victor’s Canicobar (VOCX) turn, or any other person’s favourite FMT up around that area.
Let’s assume that you did get out of range going NW, either by sheer distance, or by descent, or by a combination of both, the simple fact is you get
caught on the way back. The bottom line is this. To get to the SIO, you have to fly past Sabang Radar AGAIN. You have to fly abeam well to the west.
How far west ?
To illustrate, to avoid detection:-
At FL100 you have to be abeam south-bound west of 92.5E
At FL150 you have to be abeam south-bound west of 92.1E
At FL200 you have to be abeam south-bound west of 91.7E
At FL250 you have to be abeam south-bound west of 91.4E
At FL300 you have to be abeam south-bound west of 91.1E
At FL350 you have to be abeam south-bound west of 90.8E
At FL400 you have to be abeam south-bound west of 90.6E
Problem is, all of the proposed FMT paths are well within Sabang’s Radar coverage, passing west abeam the Sabang radar, in the block 93E to 94E.
At 93E you have to be below 5,000 feet, and at 94E, you have to be below 1,200 feet, to avoid detection.
Clearly, any thought of avoiding detection by an operating Sabang Radar, in the north or west, is simply not viable.
Now look at it from the perspective of Lance-Corporal Blogs, bored out of his brain, in the wee small hours, watching regular identified airliners, following the same old airways, re-burning the same phosphor pixels on his screen, yet again, and then, suddenly, this “NEW blip” pops up.
This “NEW blip” looks very SUSPICIOUS to Lance-Corporal Blogs, because,
(a) it is south-bound – CROSSING all those air routes,
(b) it is UNKNOWN,
(c) it is UNIDENTIFIED,
(d) it is UNEXPECTED, and
(e) it is not on, let alone more-or-less following, any recognised air route, high level, OR low level.
Decision ? ………… ”
“LIUTENNAT – SIR – WAKE UP SIR – LOOK AT THIS – SIR !!”
So, when all said and done, what is the point, of what I shall now call, “the ludicrous north west passage of MH370” ?
If avoiding Sabang Radar was the objective, it was a really dumb plan to go NW, doomed to failure.
If avoiding Sabang Radar was the objective, the really smart plan, was to go SW, south of Sabang, AND overfly Ache, at low level.
Taking RKP02 as 17:52, proceed FL350 towards VAMPI – BUT – ONLY GO AS FAR AS 054040N0985950E,
Then turn towards TASEK, then commence rapid descent at MMO/VMO to reach FL140 – repeat – reach FL140 – by NAULI.
(NOTE: At FL140 and below, on the track described below, we are BELOW Sabang Radar’s effective horizon, in the radar shadows, created by the high terrain south of Sebang, in northern Ache.)
Maintain VMO/330KIAS – at FL140 – gives a GS of 420 knots.
Maintain FL140/330KIAS/420KGS from NAULI to OPUNG (necessary waypoint for LSA safety reasons).
Maintain FL140/330KIAS/420KGS from OPUNG to MAIMU,
Then, with the lights of WITC in sight,
Reboot the SDU (around 18:25),
and THENCE,
Commence climbing to curise ALTITUDE,
Overfly WITC (NAGAN),
Proceed out to sea, climbing, accelerating, (18:27/28 (Arc 1)), GENTLY turning to 210(T) (towards LUBIS), and thence onwards to UPROB.
On this track, the climb profile REMAINS BELOW Sabang Radar’s coverage all the way up to just over FL350.
In other words, Sabang Radar never detects it.
A much better escape plan, obviously.
It works.
It is stealthy – it DEFEATS Sabang Radar.
It is do-able, it is achievable, within the aircraft’s performance limits, when skilfully flow, at the limits.
It also logically explains why the SDU was rebooted when it was.
But BEST OF ALL, it confirms that the Indonesians were genuinely telling the truth, since they genuinely “did not see it – IN OUR AIRSPACE”.
As a side note, this saves about 160nm from the most common northern FMT’s for the trip south, but it eats the fuel at low level, that those 160nm would have saved, at cruise. We still end up around 38S.
@Ventus45
“If avoiding Sabang Radar was the objective, the really smart plan, was to go SW, south of Sabang, AND overfly Ache, at low level.”
Looking forward to the sequel to ‘Really Smart Plan, part deux‘. How to avoid TNI-AU SATRAD 231 Lhokseumawe and SATRAD 234 Sibologa.
Look no further. Here it is.
TNI-AU SATRAD 231 Lhokseumawe apparently couldn’t see it in plain sight – only 69nm away at Vampi – at FL350 – now could it ? So, either the Indonesians are being untruthful, or it wasn’t flashed up. I will go with the latter.
As for the question of TNI-AU SATRAD 231 Lhokseumawe actually being able to see a target at 30 nm away – at FL140 – at Ovaro – in all that ground clutter – it would be difficult enough to get a decent hit – but to get a series of hits – good enough to track it – highly problematic uder the best of circumstances – in my view. So, if you are Z, and you want to stay alive, go via Ovaro – not Vampi.
TNI-AU SATRAD 234 Sibolga is no longer in the equation, even if it was flashed up on the night. The point of closest approach to Sibolga on the WITC (NAGAN) TO LUBIS track is at 3.475N 95.925E (186.7nm at 300.25(T) from Sibolga). The lowest coverage of Sibolga at LUBIS is a bit over FL250. If the aircraft climbs from FL140 to, and maintains, FL240, until 63 nm past LUBIS, (crossing Lat 2.00 N) it is then free to climb unrestricted to FL350, and is able to reach FL430 with radar impunity at UPROB.
https://www.mediafire.com/view/ykypraxz5i5nukl/Track_across_Ache.png
@Sid Bennett
That is interesting if you are using a different set of BFO’s for each ping, based on 154 bias. So what is your set of actual BFO’s for Arcs 2/3/4/5/6/7? and that still yields 186T? I guess if you are using 154 bias for the predicted and observed, that just cancels out.
@ventus45
That path is perhaps consisent with the simulator study if @Mick says the simFMT turn was in progress before VAMPI.
But overall I assume the original JIT joint team must have had access to more proprietary knowledge and radar data than we do (eg; Singapore radar aircraft data, etc.) and my assumption is JIT (Inmarsat, Boeing, NSTB, AAIB et al) were in agreement it went up Malacca Straits and matched up with the Arc1 pings there.
@Mick Rooney,
Perhaps these university studies are not funded by DSTG, but instead by OI.
@George G,
You said: “You, as I understand it, have chosen to initiate the route search at (any) considered arbitrary latitude “on” Arc 2.”
That is not correct if by “on” you mean EXACTLY on the Arc. I don’t start a search/route fit exactly “on” Arc 2. I do require the BTOR at Arc 2 to be consistent with the known BTO reading noise (29 microseconds 1 sigma), so the 19:41 position will be CLOSE to Arc 2. I don’t use any arbitrary limits on latitude or longitude.
You said: “Is not the Flight Level, or the chosen flight level for any particular arbitrary route check, just another “Assumed”, or selected or iterated parameter ? Why have you discriminated Flight Level from the other parameters of Lateral Navigation Method, Speed Mode and Initial Bearing ?”
I would prefer to fit all seven of the Route Parameters, but several of the Route Parameters are not amenable to fitting because they are not continuous numerical parameters. This is the general case for the Speed Mode, with the exception that for constant Mach or constant KIAS one could fit the numerical value. The most-used speed modes ECON, LRC, MRC, M0.84, etc. are discrete choices, and the choice must be manually optimized. The same holds true for the lateral navigation method. In principle, the bearing may be optimized using SOLVER, but in practice this is excruciatingly slow. It is better in my experience to assume the bearing value and manually increment each fit with small steps in bearing. This provides a good picture of which regions are of interest. Then, one can tweak the best-fit bearing, if desired, beginning with an initial guess which is very close to the optimum value. The Flight Level is amenable to fitting, but is a complicated case because the TAS is really the parameter most directly affecting the objective function. You will appreciate that there are generally multiple combinations of Flight Level and Speed Mode which produce the same average TAS. Each one of those pairs requires a different Fuel Flow Factor to achieve MEFE at 00:17:30. My experience is that generally the EXCEL SOLVER is incapable of optimizing these strongly dependent parameters in a practical amount of time. So, what I do in practice is initially assume the Flight Level, optimize the route, and look at the mean of the GSEs from 19:41-00:11. If that mean GSE is not near zero, then I know the TAS is slightly off. Then I have a choice to either tweak the Flight Level if the mean GSE is small or, if the mean GSE is large enough, I change to a different Speed Mode. In all cases, I allow the Flight Level to vary and be optimized in the final fit, but rounded to the nearest 100 feet.
You also asked: “Is your reason so that you can fit flight level as you progress through the fourth leg from 22:41 to 00:11 dependent upon the probability that the FEFE (First Engine Fuel Extinction or Flame-Out) may possibly have occurred during this leg and that the aircraft will have begun a slow descent in order to maintain selected aircraft speed ? In this way by generalising the flight level as a fitted variable you may be able to accommodate this more easily in your analysis calculations ?”
No. I don’t fit climbs or descents from 19:41-00:11. Nothing in the satellite data indicates these occurred until after 00:11. My end-of-flight model predicts that REFE occurred circa 00:09:30, and the aircraft began slowing down then. Descent began circa 00:16. So, there is a very minor effect on the average speed from 22:41-00:11 due to REFE/INOP prior to 00:11. The aircraft was still descending toward maximum INOP altitude when MEFE occurred, so the descent continued at MEFE and accelerated.
You also asked: “New subject or question: For your STEP #2 you say: “(Determine initial guesses for key parameters, including 4 fitted route parameters, corresponding handshake positions, and Fuel Flow Factor)” for which I repeat you say “4 fitted route parameters”. Your list of “Fitted Variables” includes 19:41 Latitude and Longitude and Flight Level (see above query). Is the Range for each of the four legs from Arcs 2 through 6 your 4th fitted route parameter. ?”
Good catch! That was my error. I should have said “3 Fitted Route Parameters”, not 4. The ranges between the handshake positions are not included in the “7 Route Parameters”.
@Ventus45
I don’t follow. The TNI-AU air defence surveillance sector ‘Kosekhanudnas III’ comprises 4 sites: Dumai, Lhokseumawe, Sabang and Sibolga.
Why contrive that only one site may have been operational and therefore expect 9M-MRO to be navigated so as to avoid that one site (in your case, Sabang)?
The path you have then contrived from 054040N 0985950E to NAGAN is in clear LoS from the Lhokseumawe radar site for approx 130NM, even down to FL140.
An offer you couldn’t refuse . . .
The Cartoonologist has just made an offer that might attract some attention. $1000 of his own money if you can show him that his maths is wrong.
https://twitter.com/MikeChillit?ref_src=twsrc%5Egoogle%7Ctwcamp%5Eserp%7Ctwgr%5Eauthor
I’ve tried to point out numerous errors previously. He doesn’t listen and turns the argument around into something bordering on defamation. I’m not trying again.
@Don Thomson: Maybe you can answer my question, because nobody did by now. Last radar contact at 18:22 10nm north of MEKAR. Beginning of flight via BEDAX SouthPole at 19:23 in Richard‘s Example in Fig.No.4. Distance between last radar contact and start point about 200nm. Why did MH370 need 1h1min for this distance?
The last possible time for start time is 19:41 as that’s the time of crossing arc2. So we find 1h and19min max. time for performing FMT and starting the route BEDAX/South Pole.
Sorry in case I missed something obviously trivial to scientists, I‘m only an interested layman.
@Don Thompson
As you have pointed out in the past, TNI radars are a fragmented mix of systems, acquired over the years, from different manufacturers. Many open sources indicate that they have many maintenance issues, and their general upkeep and operational readiness is publicly acknowledged as being well below par. It is an open, public, political issue in Indonesia, and has been for a long time. Even the head of the TNI-AU has given interviews on the subject, openly stating that only 40% of the country is covered. (It reminds me of the JORN debacle, actually …. chortle.). Anyway, a good read on all this is https://seer.ufrgs.br/austral/article/download/83627/52888 which details the deficiencies of the TNI-AU, and among other things, specifically calls for more investment in radars. That paper by the way, references a document that I searched for, but could not find (Source: Susanto & Dicky (2015); Command and Control Center of the Indonesian National Army Air Force (Puskodal) National Air Defense Command (Kohanudnas), August 23, 2017.) that may be very illuminating. Perhaps you may have better luck finding it. Further, I recall seeing somewhere, a year or so back, that the government has indeed provided significant extra funding for radar system renewal, upgrades and expansion. All that is, and has been publicly known for some time. One example: It seems that the antenna rotator main bearings on a couple of even the newer Thompson radars are troublesome. http://lintasindokencana.com/news/ It is not inconceivable therefore, that interested people in the region (including Z) may have been well aware of what was operational and what wasn’t.
Regarding the LOS from Lhokseumawe radar site to my track, you are correct. I got my waypoints muddled. I meant to say OPUNG – not OVARO (it was late last night). It could have been tracked, but only as far as OPUNG, if SATRAD 231 Lhokseumawe was flashed up. See https://www.mediafire.com/view/gi95zwimq5hyuwu/SATRAD_231_Lhokseumawe_view_of_flight_path.png/file Actually, that would not have been a negative from Z’s point of view, (as a pilot planning a route is concerned) because the whole point of this route (as opposed to looping around Sabang) is that it achieves three things:-
(A) If tracked, he achieves the deception of apparently heading for Africa, not the SIO, and:-
(B) If tracked, heading out to sea makes a tail chase scramble by the TNI-AU from their nearest fighter base way down south pointless, even if they were on QRA, and:-
(C) If not tracked, the authorities are clueless, both in real time, and forever more.
Thus, he is both “safe” from interception, and, they have no idea where he is “really going”.
The disadvantage of looping around Sabang, (as I said to Gerald) is that you will certainly be seen on the way back south from any northern FMT, by Sabang (and we have to assume it is 24/7, because being the most important outpost, any TNI-AU General who wants to keep his job will ensure it has top priority for spares etc, and that it be kept at the highest levels of operational readiness and effectiveness). In this case you are actually flying INTO an interception risk, not away from one. If Sabang sees you, as you say ‘Kosekhanudnas III’ will be aware, and will flash up Sibolga if it already isn’t. Thus, the “negatives” of this route are:-
(A) If tracked, they know you are on a constant course and speed. That gives them the information, and the time that they need, to set up an intercept solution for the fighters, off the west coast, further south.
(B) Although direct tracking would be lost exiting Sabang coverage (because the FMT tracks are too far west of Sibolga’s coverage), a scrambled fighter would, once at an altitude of say FL350, would itself be within Sibolga coverage, and more to the point, it’s own on-board radar (able to see an airliner target at FL350 at up to 400 nm) would be data linked back to ‘Kosekhanudnas III’.
Thus, he is both “unsafe” from interception, and, they now have a very good idea of where you are “really going”.
Overall, regardless of what the Malaysians say about their famous “last hit at 18:22”, I am convinced, that if Z did this at all, he would not have gone up there, he crossed Sumatra.
In this 2015 report by the DSTG entitled “Bayesian Methods in the Search for MH370”, professor Fredrik Gustafsson is on the Acknowledgement list, which also mentions some university researchers from the UK, i.e. Simon Godsill (Cambridge University) and Simon Maskell (Liverpool University), but no mention of anyone from Finland.
I agree with Victor that “the Australians” refers to the DSTG.
DrB
Thank you for your response.
With respect to the proximity to Arc 2 at start of a route search, I had considered using the term ‘on or close to’. I eventually chose “on”. My reasoning was that this might better represent approximation or uncertainty. Your answer clarifies this.
You say: “I would prefer to fit all seven of the Route Parameters, but several of the Route Parameters are not amenable to fitting because they are not continuous numerical parameters.”
From this statement and from other general aspects of your response I now think I have a much better understanding of your discrimination between Assumed and Fitted route parameters. The assumed parameters are those for which you are forced to make discrete selections, hence your use of the word SELECT in your recipe STEP #1.
Hence there cannot be any uncertaintainty in these selections.
And, at the risk of repetition, I think I now understand that your fitted parameters are continously variable parameters for which there are valid uncertainties and for which correlations with other fitted parameters can be utilised to compare both smooth or not-smooth characteristics and provide statistical comparison between any pair of arbitrary route checks. Here the use of the term “arbitrary route checks” is simply my own and you or others may have alternative descriptors.
Your comment concerning your allowing Flight Level to vary and be optimised as you describe further helps in my understanding of your method. For this I am grateful.
You say: “I don’t use any arbitrary limits on latitude or longitude.”
I understand that to mean that for any particular arbitrary route check then for the estimate of latitude or longitude there is an uncertainty upon that estimate for which uncertainty you provide no limits other than that the resultant solution, in combination with consideration of other parameters, makes sense.
For example, at Arc 2 at 19:41, the location of the arc (let’s term it “Arc 2.0”) at the height of the aircraft which intersects the spherical surface determined by the BTO at 19:41 is itself dependent upon on the actual location of the satellite in space relative to the earth with the associated uncertainties and also the uncertainly concerning actual aircraft height at the time. We can then define Arc 2 as that arc which lies directly below Arc 2.0 and which lies on the surface of the earth (which may be water).
Then, in accordance with your recipe STEP #2 we make (an educated I may propose) guess as to either of Latitude or Longitude. As we now have an intersection of two lines on the surface of the earth we have located a point. Hence the other of Latitude or Longtitude. This a “calculated” or resultant value with uncertainties resultant from those already discussed.
Having now again reviewed the approximate location of Arc 2 on the surface of the earth, if starting out to conduct a general iteration I would now choose Latitude as the first earth surface location parameter for which to make a guess. This is simply because for each and every Latitude in the range of interest along Arc 2 there is one and only Longitude. However for some Longitudes there are theoretically two possible Latitudes in the range of interest along Arc 2.
(As an aside, the above indicates I would initially estimate Latitude and Longitude on Arc 2 in the range of interest along Arc 2 by the following process: Determine the location of the satellite; Choose a Flight Level for which to make the iteration; Determine the actual aircraft height above the earth based on flight level and atmospheric conditions, i.e. pressure; Find the intersection of the aircraft height with the spherical surface determined by the Observed BTO; Theoretically drop down to sea level to define Arc 2 on the surface of the earth; Then iterate a value for Latitude, and finally determine a corresponding Longitude.)
Above I have deliberately used the term “range of interest”. For clarity, that is not to be confused with potential search areas in the Southern Indian Ocean, being “Regions of Interest” elsewhere in this blog discussion.
The “range of interest” is where educated guesses may be made within realistic bounds for any parameter. For example, for Latitude on Arc 2 an initial range of interest might have been bounded by (say) N15 to S4 (Example Ref: Richard Godfrey, 2019-06-30 Blowing’ in the Wind, Figure 6.). Of course, I expect that you quickly limited this range to a much smaller more realistic range.
Similarly, a range of interest for Flight Level might well have been initially bounded by (say) FL50 through FL450, both unrealistic extremes, but again I expect you would have quickly brought the FL range into realism.
______________
There is a point to the latter parts of the above:
Some might infer that having obtained a point from which to proceed from Arc 2 to Arc 3 and so on to Arc 6, then the uncertainty concerning the latter Arcs or handshakes may be less constrained than the first discussed.
I consider any such inference mathematically incorrect, but it may be worth your time to make such a statement.
Consider my explanation concerning Arc 2, above, or the possible aircraft position at the time of the Second Handshake (of 7 handshakes). Exactly the same discussion should apply to any one of the handshakes 2 through 6.
The only difference, as I see it, for any particular arbitrary route check is that:
i. For the handshake at Arc 2 the Latitude was simply chosen by lottery, even if systematically stepped out in small increments.
ii. For the handshakes subsequent to Arc 2, the estimate (or ‘guess’) of the Latitude is a resultant of transition from the previous Arc or Handshake along the path defined by the previously Selected Assumed Parameters and chosen Flight Level to intersection with the spherical surface as defined by the Observed BTO and Satellite Position at the Time of the Handshake, and subject to estimated atmospheric conditions.
@haxi: That’s good detective work.
I think the association with the Australians is through the DSTG. However, OI likely funded the research.
@Brian Anderson: More silliness. Considering that some have shown that his math is wrong before a prize was offered, I’ll make a bold prediction that he will never award that money.
@TBill
The the fixed bias and some slight offsets (a larger one for the eclipse time) developed from a study of the Inmarsat data (I previously republished some of the results to this thread). Long ago I accepted that premise that the satellite data is real and consistent (except perhaps for a few measurements during re-logons). Many of us take this position. What is important is that the same slight fudges are used for all of the cases studied. Recently, when I studied the path suggested by Richard of NILAM+AGEGA+180 using exactly the same offsets, the result at was entirely comparable to his published data. In effect, the 186 and the 180 two paths are comparable in probability (noting that there are other factors that are omitted here in the argument as to which path, if any, is most probably as a scenario consistent with these satellite results).
I can tell you that whenever I make a slight adjustment (errors, including time of turn) in the path at AGEGA or IGOGU, the results degrade rapidly, which is why I continue to argue that connecting the proposed paths through the FMT will eliminate many of them. Continuity is essential in the flight path, even if we don’t have continuous data.
@George C,
Just to be clear, my route fitting method is not the same as the one you described above at 2:42 a.m. All fitted parameters are effectively varied simultaneously (in parallel). SOLVER does not show when each variable is being adjusted, although one might guess they are done in the order listed within one iteration. The important point is that all the legs are adjusted in “parallel” through the multiple iterations. It does not solve for the 19:41 position, then solve for the 20:41 position, etc., in a series fashion.
@Sid Bennett,
You said: ” In effect, the 186 and the 180 two paths are comparable in probability (noting that there are other factors that are omitted here in the argument as to which path, if any, is most probably as a scenario consistent with these satellite results).”
Actually, the probability of the LNAV 186 route is not comparable to that of the LNAV 180 route, being 4X lower (when considering BTORs, BFORs, & GSEs). In addition, that optimized-probability 186 route is impossible from a fuel perspective.
@DrB
To be clear, I am comparing the results where the path starts at NILAM and follows the specific routes that I mentioned. Starting at or after the FMT is not sufficient to define the paths for comparative purposes.
For a better comparison one should eliminate the potential offset in the flight path along N571, and the difference in total flight distance between the two options is about 40nmi.
When I compare flight paths it is based on the “rms sum” of the normalized (to the nominal measurement errors) BFO and BTO residuals for the entire flight path from NILAM. For both cases, the flight path has an assumption so that the first phone call data is compatible. Flight paths without such a plausible maneuver (turn or descent) are not viable. This is another way of saying that the entire flight path needs to be accounted for.
I am going to do a more careful comparison of the estimated parameters between ping locations and will share the results as soon as I can.
How do you estimate the remaining fuel on board at your start times and locations?
@Sid
Are you using the Barry Martin/aqqa model to do your work? I never learned how to utilize that tool. But I’d be interested in seeing what an assumption of 5 drift in the bias over the flight would do to the paths.
@Brian Anderson,
The cartoonographer writes “none of us realized we had the takeoff ping ring until late 2018.”
He really does not pay attention, never has, never will. Proof that some old dogs cannot be taught new tricks.
The data necessary to plot any ‘ping ring’ for SATCOM bursts in the period 16:00UTC through 17:21UTC has been in the public domain since 2014-05-25. That data permitted the BTO bias to be derived and thus to calculate the later arcs/lines of position.
@Ventus45 wrote “I am convinced, that if Z did this at all, he would not have gone up there, he crossed Sumatra.”
OK, I won’t trouble you any further.
@TBill
The version of Barry’s model that I am using was slightly modified to accommodate some different data entry needs, but I believe it is quite similar to the public model.
It does not provide for an explicit bias vs time profile, although it could be introduced by modifying the specific offsets at each ping in an algorithmic manner. That would introduce a considerable number of cases.
I believe that changing the fixed bias only causes the match to degrade at the 186 azimuth and other azimuths.
The BFO residuals minimize at 186 and 180. There may be other such points, but I have not found them.
I will give it some further thought..
@Victor and @Don,
I agree. There are many errors which have been pointed out to him. The assumed rt angle at KLIA, the arbitrary “reciprocal circle”, the plane “sends pings”, the incorrect calculations for “ping ring radius”, the complete mis-interpretation of Duncan’s illustration to compute the radius, etc, etc.
He will challenge any disagreement with his approach in the most derogatory way, then go on to claim that no one has been able to dis-prove his maths. Therefore he must be correct. Totally delusional.
DrB
OK, thank you.
Having received your clarification and having again several times perused your previous answer to Neils [ in Comment-25039 of Aug25, 2019 at 9:03 am ] I now withdraw my previous pleading to yourself, Richard and Victor a month or so ago for consideration of a sub-set analysis using only the handshakes at 2, 3 and 5. This would be akin to “the tail wagging the dog”, particularly due to the extended time period between 5 and 6 compared to the previous intervals.
@Sid Bennett,
You asked: “How do you estimate the remaining fuel on board at your start times and locations?”
I have built an accurate B777-200ER fuel model which starts at the last ACARS fuel report at 17:07 and runs every minute until MEFE.
You can find my fuel flow model HERE .
It uses Boeing fuel flow tables, if available, and my own aerodynamic model elsewhere. It allows an arbitrary MACH, an arbitrary KIAS, ECON with 3 values of Cost Index (corresponding to MRC, the MH370 Flight Plan, and LRC), HOLD, or INOP. The fuel flows are predicted for each engine using the Fuel Flow Factors, the Flight Level, the aircraft weight, the TAT, and the ROC/ROD. The fuel remaining in each L/R tank is computed each minute. The REFE and LEFE times are predicted with 1-second precision. I also use an end-of-flight model which predicts the initial deceleration and then descent after the first engine flame-out.
To illustrate further, I have some fuel-related graphs I monitor as I am fitting a route.
An example for the LNAV 180 route is HERE .
@DrB
Thank you for sharing your work. It is surely useful in understanding the various modes and their implications. I have only browsed the points that are of most interest to me and have some more questions/comments (as is usual). (Also some of the data take an inordinate time to load on my laptop :-))
Richard has criticized the 186T model on the basis that there is insufficient fuel for the route, but your table for endurance vs range for M0.82, for example, shows ranges just short of 2800 are consistent with the MEFE time estimate. When I computed the path from 18:29, I get 2796nm. Surely that is close enough. I will need to check the exact starting point for the AGEGA path, but I believe it is less than 50nm shorter.
Your graph of a nominal flight qt 180T is interesting as it shows a step climb. Is it not the case that a pilot would have been needed to initiate the climb? That is of course consistent with the current thinking that there was a pilot present for some or all of the flight.
But, the time period for your final climb corresponds (approximately) to the first phone call attempt. In the NILAM+AGEGA+180 scenario, there needs to be some aircraft maneuver to explain the BFO measurement. I understand that this requires a descent for some period of time. Qualitatively, a descent and then a return to a higher final cruise altitude would be more compatible with the scenario. While the change in range may be small, it may be relevant when comparing endurance/range at a granularity of 10s of nm.
I have no doubt that 180T is viable as a scenario, but suggest that any presentation of that hypothesis be consistent in the correlation between the fuel analysis and the path characteristics.
@Sid Bennett,
You said: “Richard has criticized the 186T model on the basis that there is insufficient fuel for the route, but your table for endurance vs range for M0.82, for example, shows ranges just short of 2800 are consistent with the MEFE time estimate. When I computed the path from 18:29, I get 2796nm. Surely that is close enough.”
You are making the same error that DSTG made. Just because the aircraft can fly that range at a low speed does not mean it can do so at the higher speed required to match the satellite data. So, no, it it not nearly close enough. The Mach required to match the BTOs is much greater than 0.82, being 0.85 in fact. The much higher fuel consumption renders achieving MEFE at 00:17:30 at that speed of M0.85 impossible.
You also said: “Your graph of a nominal flight qt 180T is interesting as it shows a step climb. Is it not the case that a pilot would have been needed to initiate the climb? That is of course consistent with the current thinking that there was a pilot present for some or all of the flight.
My flight model has a climb above FL350 circa 17:30. This has been demonstrated by airlandseaman and others as being necessary then to explain the Kota Bharu civil radar range data. The exact altitude reached then is not accurately known. I use FL360 because LRC speed mode at that altitude and at the current air temperatures then provides a good match to the average ground speed required after diversion through the last radar contact at 18:22. Mike thinks the altitude circa 17:30 was higher, perhaps FL390 or thereabouts. He may well be correct, but, if so, it is more difficult to match the observed ground speed over the next hour with a standard speed mode at FL390 than it is at FL360.
My flight model then has a climb prior to 19:41 to the best-fit altitude for the 19:41-00:11 satellite data. In the example I showed, that southbound altitude is FL390. It is possible that the climb at 17:30 went to FL390 and the FL never changed after that.
Yes, a pilot would normally initiate the climb (it can also be programmed to occur at a waypoint up ahead, I believe). Of course, I believe a pilot was making maneuvers at least until 18:24 (when he restored power to the SDU and probably until circa 18:40.
You also said: “But, the time period for your final climb corresponds (approximately) to the first phone call attempt. In the NILAM+AGEGA+180 scenario, there needs to be some aircraft maneuver to explain the BFO measurement. I understand that this requires a descent for some period of time.”
I am not using a climb to explain the 18:40 BFOs (it can’t). Also, the 18:40 BFOs do not require a (> 1-minute) descent, although a descent is one of 3 possible means of matching the BFOs then. A second means is a SSW course, and a third means is a SSE course. A turn to a SSW/SSE course prior to 18:40, followed by a turn to BEDAX somewhat later, is one possible route that matches the sparse satellite data. With the little data we have to work with, it is not possible to prove that any descents or climbs occurred between 18:22 and 19:41, although one or both might have occurred.
@DrB
Considering that there is some speed and altitude at which the aircraft can get to the 7th arc at 37.3S, I am probably misleading you by quoting Mach speeds and FLs independently, since the met models are different. I can get essentially the same match results to the BFO/BTO by changing the FL and Mach speed at the initial time.
For comparison purposes,It would be better, using another (your) met model to determine the Mach speed and FL that would lead to a TAS of 483.4kt at 18:24. (I am only set up to do computations at FLs 350, 370 and 390and those should result in somewhat different headwinds at the end of the flight.)
I agree that a climb cannot match the BFO at 18:40, but I understand that Richard and Victor concluded that a descent at that time on a straight path may do so.
@Sid Bennett,
1. In order to accurately predict fuel consumption, it is imperative to interpolate temperature and wind in 4 dimensions (latitude, longitude, flight level, and time; in between the GDAS database values, which are coarsely spaced) for at least 10 points along each leg. Richard and I use slightly different methods, but we have confirmed our leg average values within 0.1C and 1 knot. Therefore we know our interpolated weather data are accurate. I doubt you are doing that 4-D interpolation and averaging many points along each leg.
2. It is also imperative to use the Vincenty iterative formulas to compute range, bearing, etc. for LNAV routes. All other methods have significant range errors which then produce ground speed errors as well as very different BTORs.
3. Both routes are easily reachable with a few maneuvers after the last radar contact position, with either an appropriate track or descent at 18:40 to match the BFOs then. Therefore that consideration is not a discriminator.
4. The highest probability fit to LNAV 186 degrees is a factor of 4 lower than for the LNAV 180 route, when the optimum speeds are used for both routes (LRC at 180 and M0.84/M0.85 at 186).
5. The endurance requirement of MEFE at 00:17:30 is met at LNAV 180 with an average Fuel Flow Factor (FFF) of 1.1 %. This compares well with the expected value of 1.5% +/- 1.0% with the air packs always ON, and even better with 1.2% +/- 1.0% with the Air Packs OFF for about an hour..
6. The best FFF for LNAV 186 is -3.4% at M0.84. This is quite inconsistent (~3-sigma) even with the most optimistic fuel consumption assumption – that the Air Packs were off from 17:30 until MEFE – which is FFF = -0.6% +/- 1.0%.
7. Whenever you get an adequate and accurate meteorological model running, you will find that the average delta SAT from 19:41 to 00:11 is +9.1C for the 186 route but only +2.3C for 180. The very high air temperatures (relative to ISA) along the 186 route contribute significantly to its higher fuel consumption (at all speeds).
8. The average ground speed for an optimum probability fit to the satellite data is 488 knots for the 186 route. The average TAS required to make that ground speed is 492 knots, due to average headwinds. That is why an air speed setting of M0.84/0.85 is required. The headwinds are stronger for the 186 route than for the 180 route. That also contributes significantly to its higher fuel consumption.
9. Using a lower speed than M0.84 at 186 degrees helps reduce the fuel disagreement, but the fit to the satellite data is degraded further, resulting in an even lower probability which is in that case greater than 4X worse than at 180.
10. Simply, put, 9M-MRO could not fly the LNAV 186 route at M0.84, and therefore it is completely rejected, both from the satellite data perspective and from the endurance perspective. You are beating a dead horse.
@DrB
2. Is there any reason for you to believe that Barry’s method does not use the Vincenty algorithm. This method produced results that were consistent with and included in the IG initial estimate.
I would still appreciate your assistance in determining the FLs and Mach speeds that would lead to a TAS 483.4kt.
@ Sid Bennett,
If you want to know what range method Barry used, you will have to ask him or look at the code yourself. I can’t answer that question.
A TAS of 483 knots for LNAV 186 is far too slow to provide even marginal BTORs.
@Sid Bennett
You are still missing (or I suspect deliberately ignoring) the fundamental issue.
Barry Martin’s model uses a Vincenty iteration, but his navigation and fuel model is not based on an accurate interpolation of the GDAS weather data. TAS is affected by Temperature at the relevant Altitude and the relevant Time and GS is affected by the Wind Speed and Wind Direction at the relevant Altitude and the relevant Time. Fuel consumption is affected by Delta ISA-SAT, Mach and Aircraft Weight.
Barry rounds to the nearest degree of Latitude and Longitude, to the nearest ISA Pressure Level for Flight Level and does not evaluate the weather data to the actual time. Barry completely underestimated the Temperature, Wind Speed and Wind Direction dynamic within a degree of Latitude, within a degree of Longitude, within a 50 hPa Altitude pressure level and within each 3 hours of the GDAS data at 15:00 UTC, 18:00 UTC, 21:00 UTC, 24:00 UTC and 03:00 UTC.
As Bobby says, in order to accurately predict fuel consumption, it is imperative to interpolate Temperature and Wind in 4 dimensions (Latitude, Longitude, Flight Level, and Time).
As I say, in order to accurately predict navigation to the next step, it is imperative to interpolate Temperature and Wind in 4 dimensions (Latitude, Longitude, Flight Level, and Time).
@Sid Bennett, @DrB:
The Vincenty algorithm is not required for accurate results. My method integrates in discrete time steps using the exact differential relationships for geodesics and rhumb lines for a path above the WGS84 surface. For geodesics, the results are within a small fraction [of a NM] of the on-line Vincenty calculators, with the added benefit that the meteorological conditions can be applied at many points along the path.
I believe that Barry M uses something similar.
[I see that Richard has informed us that Barry M’s model does use Vincenty.]
@Richard. Most of what you have said above about Barry’s model above is plain wrong. I suggest you familiarise yourself again with its workings before misrepresenting it further.
@Paul Smithson
Once again, you are stating complete nonsense.
1. Barry Martin matches to the nearest degree of Latitude and Longitude (please see his tab MAIN column AA and AB “Wind U and V components” and column AE “Temp Deviation”).
2. Barry Martin only includes tables for 150 hPa, 200 hPa and 250 hPa. He does not include 300 hPa and 350 hPa (please his tab FIELDS) to be able to cover Altitudes from 26,632 feet up to 44,321 feet. Barry performs a simple linear interpolation across the adjacent Pressure Levels and the adjacent Latitudes and Longitudes.
3. Barry Martin only includes tables for 8th March 2014 00:00 UTC. He does not include tables for 15:00 UTC, 18:00 UTC, 21:00 UTC and 03:00 UTC.
I have analysed the dynamic of the GDAS Wind Speed, Wind Direction and Temperature data for the solution space and there are significant variations as shown by the linked table below:
https://www.dropbox.com/s/fxb97kpf9sfyn53/GDAS%20Standard%20Deviations%20in%20MH370%20Solution%20Space.png?dl=0
@Richard. If you look at the formulas in columns AA and AB I think you will find that they spatially interpolate in lat long for U and V winds. Similarly column AE for temperature deviation. Once again, your preening has got ahead of the facts.
For the record, I have no objection to the assertion that a 4D interpolation of Wx is a “good thing to do”. However, I wonder why you feel the need to denigrate the work of others in the process, particularly when that criticism is ill-founded.
Now, since you are so assertive of the vital importance of 4D interpolation, perhaps you would be kind enough to demonstrate the actual difference for the purpose of route fitting. For example on your preferred route fit with a) time-interpolated Wx b) using 2100Z Wx throughout.
@Paul Smithson
Once again you are not following the blog.
My comment was addressed to @Sid Bennett. @Sid Bennett had specifically asked me for a critique of Barry’s model, which Sid is using. You are butting in and showing your ignorance. Please read my previous comments first, before ranting on.
For the record:
1. I provided a full answer to @Sid Bennett first privately and then publicly.
2. I made it clear to @Sid Bennett privately in emails dated 30th July 2019 and again on 7th August 2019, that I did not want to criticise Barry’s model in public. Sid disagreed and thought people should be aware.
3. I specifically pointed out to you that Barry uses a simple linear interpolation across the nearest Latitude, Longitude and Pressure Level, but ignores the time dynamic.
4. I provided you with a table, which you ignore, that specifically states the changes over every 3 hours in the GDAS data and the need to interpolate over time between the diversion shortly after waypoint IGARI at 17:20 UTC and the end of flight shortly after 00:19 UTC, almost 7 hours later. It does not help to just take the GDAS data at 00:00 UTC. The wind speed and direction have changed massively over 7 hours, in the worst case the wind direction has completely reversed in that time frame for many locations. The standard deviation of the Wind Speed over 3 hours is 13 knots and the standard deviation of the Wind Direction over 3 hours is 27 °T.
5. I provided you with a table, which you ignore, that specifically states the changes over every 50 hPa in the GDAS data and the need to interpolate over Pressure Levels between 150 hPa and 350 hPa every 50 hPa. Depending on the Flight Level selected It does not help to interpolate linearly between 150 hPa, 200 hPa and 250 hPa. The wind speed and direction have changed massively over 50 hPa, in the worst case the wind direction has completely reversed in the next 50 hPa for many locations and then back again in the next 50 hPa. The standard deviation of the Wind Speed over 50 hPa is 13 knots and the standard deviation of the Wind Direction over 50 hPa is 35 °T.
6. Here is a more detailed analysis of the Wind Speed, Wind Direction and SAT dynamics. This analysis of the dynamic in the GDAS solution space is from 15°N to 40°S and from 80°E to 105°E, from 150 hPa to 350 hPa and from 18:00 UTC to 03:00 UTC+1.
(1) As you would expect, the SAT changes predominantly with Altitude by on average -10.37°C per 50 hPa (worst case -17.1°C), but little over 1° Lat/Lon or time (worst case -3.6°C over 1° Lat).
https://www.dropbox.com/s/tn45uxu4lwpl4k4/Weather%20Data%20SAT%20Dynamics.png?dl=0
(2) The WNDSPD changes predominantly with Time and Altitude (worst case -120.74 knots over 3 hours), but less over 1° Lat/Lon (worst case -34.68 knots over 1° Lat).
https://www.dropbox.com/s/oxyxxiigaylmiyf/Weather%20Data%20WNDDIR%20Dynamics.png?dl=0
(3) The WNDDIR changes significantly with Time, Latitude, Longitude and Altitude (worst case ±180.0°T).
https://www.dropbox.com/s/oxyxxiigaylmiyf/Weather%20Data%20WNDDIR%20Dynamics.png?dl=0
I confirm it is important to interpolate GDAS data in all 4 dimensions and anything less is inadequate.
CORRECTION:
(2) The WNDSPD changes link should be:
https://www.dropbox.com/s/gzw0c76vystwfuy/Weather%20Data%20WNDSPD%20Dynamics.png?dl=0
@Richard
I am hardly ignoring your statements regarding the details or your use of your met data model. I would still like to know the Mach speed vs FL that yields a TAS of 483kt at 18:29 using your met model. We all need to follow our paths until we see the end. I am a slow learner.
@DrB
Since it was you who questioned Barry’s model, I properly asked you for the basis on which you concluded that the Vincenty algorithm is not used. It is and I verified it in my working copy prior to posting my previous response.
Although I have not studied the NILAM+AGEGA+180 hypothesis you have hinted at in the same level of detail as the 186T path, an excellent solution does exist for the complete 180T case (from NILAM to 00:11). When I compare the path lengths, the 186T path has a length of 2764nm and the 180T path has a length of 2775nm.
For comparison purposes, the 180T path has a TAS at the start of 475.7kt.
Barry’s model, as I use it, navigates by azimuth only in the LNAV mode and the effect of along path winds is clearly evident.
Is there any literature that you know of that describes the generation and accuracy of the weather data that you are using? My expertise with “weather” begins at a height of 100km 🙂 .
I may not be able to pay attention to this thread for most of the day as I have some professional obligations to deal with.
@Andrew:
As the current work points to 180T, can you think of a possible non-nefarious explanation for this track?
@Peter Norton
No!
thanks, Andrew
@Victor @Richard @DrB
I finally got a chance to try out FMT at AGEGA on FS9.
So I see one problem is FS9/FSX (as we know from the past IGOGU FMT work) is that Micorsoft Flight Sim takes a big overshoot on a turn over 90 deg. One way to prevent that is to manually start the turn about 22 nm before AGEGA by advancing waypoint. But it leaves us with a gap in understanding between exactly how a real B777 would turn vs. FS9/FSX.
Using the above technique, I see reasonably good match to Arcs 2-5 by a Magnetic flight path that goes AGEGA to ISBIX then Discontinuity which defaults to 183 magnetic. With the winds aloft this approximates a 180T path to Arc5 down the 93.5 longitude line. At Arc5 you have to assume (active pilot) slow down and descent to meet Arc6. End point is right on DrB’s prior pin, assuming no heading changes by the active pilot.
https://www.scribd.com/document/184815403/B777-Fuel
I found this document while browsing and since I had not seen it before I am posting the link. It is interesting at about p12 where it discusses the DC fuel pump that operates with both engines failed and no AC in an attempt to restart the left engine.
@Sid Bennett: I don’t have access to your document because I don’t have a scribd account, but I suspect you are looking at the Fuel chapter of the FCOM. The operation of the DC pump after fuel exhaustion, including how it supplies fuel to both the left engine (for a restart) and the APU, and how the intake and supply is affected by abnormal attitudes, has been discussed at length here.
@Victor
Great..
@Niels
I have run your updated Case C, AGEGA – ISBIX – BEBIM – EKUTA.
I changed the Flight Level to FL348 (36,295 feet) and adjusted the Mach LRC values accordingly.
The start point was modified to fit 3.20°N at 19:41:03 UTC, as you proposed.
The initial track is 182.4743565°T from 4.6872400°N 93.8168276°E at 19:20:00 UTC toward waypoint ISBIX, as if coming from waypoint AGEGA.
There are slight track adjustments at ISBIX (182.4661303°T to 179.1718662°T) and BEBIM (179.1575164°T to 178.1564522°T) for the great circle LNAV paths to the next waypoint.
You will find the results in the following link:
https://www.dropbox.com/s/ia9vh4nyr1e003t/MH370%20Flight%20Path%20Model%20V19.8%20RG%20LNAV%20LRC%20FL335.3%20Waypoints%20Niels%20Case%20C%2009092019%20Full%20Report.png?dl=0
@Richard
Thank you, Richard. I developed a procedure to rather quickly optimize the BTORs and wanted to test the procedure in this iteration. It indicated that in combination with a shift north of the 19:41 position to N3.2 (from N2.76 in the previous calculation), the mean GS should be increased with 8 knots (from 468.0 in the previous calculation). Somehow the mean GS increased only by 6 knots, which could explain the increasing negative numbers for BTOR with time. So the increase in FL from 335 to 348 seems to be not sufficient and I have to check in detail what went wrong there.
This “fine tuning” of a potential path is a subtle job from a calculation point of view and needs good correspondence in for example the use of wind and temp data between the different tools.
@Niels
I have been fine tuning for years using a visual tool in Barry’s program. When we are talking of FL348 and such, we are really just accounting (approximately) for unknown errors in the met model. As long as the results are consistent and smoothly varying one can assert that the computational aspects are substantially correct and can be used to compare different proposed paths. (On the other hand, a correct solution will show a distinct minimum in the joint BFO and BFO errors)
As I understand it, you are talking about a difference in distance traveled of about 30nm over 5 hours, between the two cases.
The question remains as to whether quantitative error measurements obtained from different computational models can be used to compare proposed flight paths. Richard and I exchanged computations of my start point for a 180T path, and when I saw the specific differences in results, I adjusted the Mach speed slightly (at a different FL)and the differences in errors were minimal.
Making a case for a particular end point depends not only on the survey work that Richard and DrB did, starting just before 19:40 to identify plausible paths, but on the complete paths used to join up the pre-FMT and post-FMT paths for those identified paths.
I suggest that the next step would be to start at AGEGA and use either 180T or ISBIX. This would avoid complicating the discussion by introducing an explanation for the BFO at 18:40, since the start time at AGEGA is later than that time.
Harking back to the early days of this work, I continue to believe that if one cannot find a simple (minimum number of adjustments) path, then we have not as yet localized the hot spot. Each additional turn (or whatever) introduces another parameter than can be used to fit a model to the data. We are subjective creatures and can unintentionally accept such “fits” as representing the correct solution.
@Sid Bennett said: I continue to believe that if one cannot find a simple (minimum number of adjustments) path, then we have not as yet localized the hot spot.
Unless that path represents what actually occurred.
We’ve know for over 5 years that there are straight path solutions, i.e., paths with no maneuvers, that satisfy the BTO and BFO values from 19:41 and later. Between 18:28 and 19:41, we have no way to know what occurred, other than there were one or more maneuvers. The choice of imposing a single turn or multiple maneuvers is somewhat arbitrary. That’s why it is important to consider other metrics, such as fuel consumption, drift analytics, and other statistical parameters, to discriminate among the paths.
We are subjective creatures and can unintentionally accept such “fits” as representing the correct solution.
In the current effort, whether or not successful, every attempt is made to be as accurate and objective as possible. I am not aware of another effort that comes close in that regard.
I am puzzled by the fact that most new analyses seem to point to an area already searched, including by OI.
Could it really have been missed?
Could this be a good enough reason for a new search in the same area?
One could argue that it would be a waste of time (already searched), not looking good for a new contract…
@ArthurC asked: Could it really have been missed?
Possibly missed, or possibly there was a glide beyond what was previously searched. It’s possible that the missing IFE logon was caused by the APU fuel line running dry in a steep nose-down descent rather than caused by a crash. We simply don’t know.
@Sid Bennett
“As I understand it, you are talking about a difference in distance traveled of about 30nm over 5 hours, between the two cases”
In the light in BTO accuracies 30 nm (along track) is a lot, especially for the more southerly positions. A difference of few knots averaged over the last 4.5 hours of the flight is relevant. It could be a valid question if accuracy of especially (interpolated) weather data is good enough to allow such detailed optimizations. I’m sure those involved in the most detailed calculations here have something to say about that.
Regarding my optimization effort for the .. – BEBIM – EKUTA path: it is close to and inspired on my “best fit” solution produced by my “path estimator” tool (see my recent paper). I’m checking with help of Richard how it performs in a “backward fit” to the data. I think I made sufficiently clear in my paper that I’m aware that the related ROI may not be correct and/or unique.
Victor Iannello: “It’s possible that the missing IFE logon was caused by the APU fuel line running dry in a steep nose-down descent rather than caused by a crash.”
A “steep nose-down descent” would quickly lead to a crash as well, no ?
@Peter Norton: Not necessarily. We have considered the possibility of a dive-glide-dive scenario.
A brief aside for those interested in the 737MAX saga. The different views of the FAA and EASA could lead to further delays, especially if EASA decides a third AOA sensor is required:
European regulator plans its own test flights of Boeing 737 MAX in sign of differences with FAA
Boeing 737 MAX jet to face separate flight test by EU regulators
European aviation safety agency sets strict demands for Boeing 737 MAX return to flight
I’m pleased that EASA is taking a stance over the FAA’s attitude toward bi AoA disagreement, i.e. disabling MCAS from operating. MCAS was conceived as an auto system to overcome an engine cowling issue that resulted in additional lift being generated as the AOA increased. It is a design safety issue, and just removing it from the safety equation by disabling MCAS, doesn’t make the problem go away.
Surely the FAA doesn’t want this issue to rear its head again! An additional AoA indicator is a cheap option in keeping the MAX under the 737 certification umbrella.
@Barry
The reality is that Boeing used a bandaid in an attempt to overcome physics. Simply a very bad idea.
Same story as car ABS. I can’t buy a car in the US without it now. Fortunately, I can still buy motorcycles without it.
The 737 Max should be taken out of service. Just a bad design.
https://www.thetruthaboutcars.com/2006/08/killer-abs-abs-braking-increases-rollover-risk-by-51/
@Andrew
Re: 737MAX
I found this older 2015 pre-MAX thread on JW blog re: GermanWings to be quite interesting. In the comment section @PeterNorton posted quotes from D.Soucie and R. Quest.
Sounds like Airbus had almost same anti-stall issue as Boeing (which I have heard) but really sounds almost exactly same. but Soucie says the Airbus apparently disallows nose dive so I guess maybe that helped? This may be why Lubitz made a gradual descent. Also sounds like Airbus has the similar physics issue with the engines.
http://jeffwise.net/2015/03/30/washington-post-dont-be-so-quick-to-believe-that-andreas-lubitz-committed-suicide/
@Niels
Sorry. My memory is not that good :-). All of this is a work in progress and I sometimes miss the point of a particular post. I should not have the comment.
@Sid Bennett
No problem. As there are many different view points coming together here, it is actually important that we explain and repeat the thoughts and assumptions behind our approaches and calculations from time to time.
@Richard
I’m going in detail through the last calculation results on the ..-BEBIM – EKUTA path that you’ve shared.
I still don’t understand where the difference between the “Average Ground Speed Lat/Lon” and the “1-Min Leg Average GS” is coming from. It is quite big: between 2.3 and 3.4 knots.
@Andrew Out of curiosity is it not true that there is a definite mathematical relationship between indicated airspeed, load factor and angle of attack for a given aircraft? If YES, do you know if this is used as a crosscheck on the AOA indicator? Thanks.
@ArthurC wrote “Could it really have been missed?”
That is a possibility and perhaps more likely in the area that is indicated as the Region of Interest in the blog post above.
It’s significant that we do not know the performance requirement set out by the Malaysian parties that contracted the seafloor survey in the Region of Interest. My findings, to date, indicate that the post-acquisition workflow to analyse data produced by this survey was not as comprehensive as that carried out under ATSB’s contract with Fugro.
While the sensor technology employed in that area, a Synthetic Aperture Sonar, may provide high fidelity imagery it is reliant on accurate position and attitude data to do so. The high resolution imagery is processed from, what is fundamentally, low resolution side scan sonar data. The bathymetry, over which the survey was conducted, dictated that the towfish was constantly being winched in or out as the ‘pilot’ attempted to maintain 150m altitude above the seafloor. Attitude stability was often compromised when winching and I can correlate that to degraded image product. 150m altitude would be the ideal to maintain an optimal grazing angle across the 1000m swath to each side of the towfish but often the seafloor was inclined, up or down, across the survey swath.
My study is utilising the real-time towfish position and attitude data, together with the ‘7th arc’ bathymetry data, to determine areas where the survey may be deficient. The work is ongoing.
@Victor Iannello: oh, sorry, I didn’t realize you were referring to that scenario
@Shadynuk
RE: ”Out of curiosity is it not true that there is a definite mathematical relationship between indicated airspeed, load factor and angle of attack for a given aircraft? If YES, do you know if this is used as a crosscheck on the AOA indicator?”
There is such a relationship and Boeing uses something similar for AOA redundancy management in the 777 and 787. Those aircraft only have two physical AOA sensors, but they use inertial and air data to derive a calculated AOA that is used as a third AOA input. Airbus, on the other hand, uses three physical AOA sensors for redundancy on its FBW aircraft.
@TBill
RE: “Sounds like Airbus had almost same anti-stall issue as Boeing (which I have heard) but really sounds almost exactly same. but Soucie says the Airbus apparently disallows nose dive so I guess maybe that helped? This may be why Lubitz made a gradual descent. Also sounds like Airbus has the similar physics issue with the engines.”
The Airbus incident was similar to the Boeing accidents in that a flight control system erroneously activated to lower the nose, however, the similarity ends there. In the Airbus case, the FBW envelope protection prevents a stall by applying a nose down input when the AOA reaches a limit known as Alpha-prot. Airbus uses three AOA sensors on its FBW aircraft and a voting system for redundancy management. The system compares the three inputs and automatically rejects a seemingly erroneous input.
The Airbus incident occurred when two AOA sensors froze at the same time while the aircraft was climbing. Those two inputs remained the same as the aircraft continued to climb, but the third AOA input (which was correct) started to diverge and was rejected by the system. Since Alpha-prot decreases with increasing Mach no., it decreased to the frozen AOA value as the aircraft climbed and the stall protection then activated to lower the nose.
The automatic nose down input in that scenario wasn’t horrendous, but nevertheless it could not be overridden by the pilot. The ‘fix’ was to turn off two of the aircraft’s three ADRs (Air Data Reference), which forced the flight control system into direct law and disabled the envelope protection, allowing the pilot to restore control. Airbus promulgated that ‘fix’ via an OEB (Operations Engineering Bulletin) and has since corrected the problem by introducing a new flight control primary computer software standard (See https://www.airlineratings.com/wp-content/uploads/articles/image2015-03-25-114958.pdf).
I think the ‘safeguard’ that was mentioned in David Soucie’s quote is the high speed protection that reduces the nose-down pitch authority to zero if the aircraft significantly exceeds VMO/MMO in normal law. I don’t think it was a factor in the Airbus incident.
Re your comment ‘Also sounds like Airbus has the similar physics issue with the engines’, I have not heard of any such issue with Airbus aircraft. The automatic nose down input described above is part of the aircraft’s envelope protection and is not related to the B737 MAX MCAS issue. Some media reports have described MCAS as an ‘anti-stall’ system, but that’s not really the case. MCAS was intended to correct the stick force relationship at high angles of attack, to ensure the pilot must apply increasing back pressure on the control column as the the aircraft approaches the stall. The increasing stick force certainly helps the pilot to recognise an impending stall, but it does not prevent the aircraft stalling.
@Niels
You stated “I still don’t understand where the difference between the “Average Ground Speed Lat/Lon” and the “1-Min Leg Average GS” is coming from. It is quite big: between 2.3 and 3.4 knots.”
My apologies! I was not clear in my previous comment.
The “Leg Average Ground Speed Lat/Lon” is calculated from the Latitude and Longitude of the leg start and end points at each satellite handshake compared with the “1-Min Leg Average Ground Speed” predicted by the model every minute during the leg. This is normally used to measure the GSE, but this is only applicable for flights, where there are no changes of track between the various handshakes from 19:41:03 UTC to 00:11:00 UTC.
In your case, there are changes of track at waypoint ISBIX (182.4661303°T to 179.1718662°T) at around 20:02 UTC between the handshake at 19:41:03 UTC and the handshake at 20:41:05 UTC and again at waypoint BEBIM (179.1575164°T to 178.1564522°T) at around 21:24 UTC between the handshake at 20:41:05 UTC and the handshake at 21:41:27 UTC.
This will distort the GSE values for the first 2 Legs, which are indeed artificially high and should be ignored.
So the real GSE values are between 2.3 and 2.8 knots, which unfortunately are still slightly too high (nominal < 1.5 knots).
@Richard
Thank you, it helps a bit. However: isn’t the ““1-Min Leg Average Ground Speed” predicted by the model every minute during the leg” (in combination with directional info) used to update the position after each time-step in the calculation? So where is the difference coming from?
@Victor, @Bobby
I have previously hypothesised a FMT at waypoint AGEGA. In the link below is a detailed flight path of the hypothesised FMT. This hypothesis is based on a turn starting at waypoint AGEGA at a ground speed of 411.5 knots and a bank angle of 10°, which would make the position at the end of the turn 8.835°N 93.760°E. At the end of the turn, LRC speed mode is selected at FL270. The climb back to FL390 lasts for almost 20 minutes starting at around 19:26:00 UTC and continuing to around 19:46:00 UTC.
In the link below the time, lat, lon, altitude, initial bearing, distance travelled, ground speed and elapsed time is given for each point between 18:22:12 UTC and 20:41:05 UTC. This represents a continuous forward path with only one turn between 18:22:12 UTC and 19:41:03 UTC. There are changes of flight level from FL350 to FL270 to FL390 between 18:22:12 UTC and around 19:46 UTC.
https://www.dropbox.com/s/85ahqzvdpd7s99v/FMT%20at%20AGEGA.png?dl=0
@Niels
You ask “However: isn’t the ““1-Min Leg Average Ground Speed” predicted by the model every minute during the leg” (in combination with directional info) used to update the position after each time-step in the calculation? So where is the difference coming from?”
Yes, the position is updated after each 1-minute step in the calculation.
In your latest flight path model, I calculate the position at the satellite handshake at 21:41:27 UTC is 12.9064 °S 93.8575 °E and the position at 22:41:22 UTC is 20.7924 °S 94.1303 °E UTC. The distance between these 2 positions along a great circle at an altitude of FL348 is 472.3222 NM. We know that the time difference between the satellite handshakes was 59 mins 55 secs. Therefore the average ground speed was 472.9790 knots.
When I work out the ground speed every minute between these 2 positions, I calculate an average of 475.7639 knots, which is a difference of 2.7849 knots. You ask where is the difference coming from?
The 60 ground speed data points from my flight model vary between 468.2450 knots and 482.4020 knots. The 60 TAS data points vary between 470.7109 knots and 476.5162 knots. The ground speed minimum is at 22:37 UTC and the maximum is at 21:42 UTC.
The 60 wind speed data points vary between 1.6352 knots and 16.8509 knots. The minimum is at 22:20 UTC and the maximum is at 21:49 UTC. The 60 wind direction data points vary between 55.8661 °T and 259.8534 °T. The minimum is at 22:12 UTC and the maximum is at 22:41 UTC. The 60 air temperature data points vary between -43.8363 °C and -43.0056 °T. The minimum is at 22:12 UTC and the maximum is at 22:41 UTC. The 60 mach data points vary between 0.8067 and 0.7979. The minimum is at 22:41 UTC and the maximum is at 21:41 UTC.
So there are a lot of variables which are changing independently in time from each other. The averaging of all these variables over 59 mins 55 secs differs from simply taking the difference between the start and end points. This results in the along track error of around 2.8 knots, what we have called the Ground Speed Error (GSE).
The 60 along track wind speed data points vary between -3.0076 knots and +6.1353 knots. The 60 track data points vary between 178.0624 °T and 178.1407 °T. The 60 heading data points vary between 176.2198 °T and 179.5640 °T.
The difference between the predicted results from my model and the best fit results from the satellite data can be because of 2 reasons:
(1) The GDAS wind speed/direction and air temperature data, that I have interpolated are not correct. I have done a study comparing GDAS to ACARS data for MH371, so I know what errors to expect, GSE 1.5 knots, I need to consider changing the flight level. For larger GSE errors, I need to consider changing the speed mode.
If I get a result for the GSE of < 1.5 knots, I know that the speed mode and flight level are close to the actual values of the true route.
LNAV180 LRC FL390 gives a GSE of 1.0 knot. Your GSE is up to 2.8 knots.
@Richard
Re: AGEGA
I do agree AGEGA looks interesting as possible waypoint used. What do you propose was the flight plan? If the flight plan is AGEGA to South Pole:
(1) would the aircraft go over to 93.76 or would it proceed due south at AGEGA at 94 South? Alternately I think it could be AGEGA to ISBIX.
(2) What exact waypoint format do you propose was used for the south pole terminus?
Also if the turn radius is wide at 10 deg, I do not believe MicroSoft flight sim is accurate at telling us when the turn start would be anticipated in a real B777, but might be too soon timimg as far as we are expecting very steady BFO’s to 18:41 or so.
@Andrew
Thank you. I was jumping to the conclusion that putting more efficient engines on a older airframe means a compromise on engine placement, which could necessitate more reliance on anti-stall logic. You are suggesting Airbus anti-stall logic is standard, unlreated to engine physics. OK got it, but I wonder about that.
CORRECTION
(1) The GDAS wind speed/direction and air temperature data, that I have interpolated, are not correct. I have done a study comparing GDAS to ACARS data for MH371, so I know what errors to expect, GSE 1.5 knots, then I need to consider changing the flight level. For larger GSE errors, I need to consider changing the speed mode.
TRY AGAIN CORRECTION – CERTAIN CHARACTERS ARE NOT BEING INTERPRETED AS TEXT
1. The GDAS wind speed/direction and air temperature data, that I have interpolated, are not correct. I have done a study comparing GDAS to ACARS data for MH371, so I know what errors to expect, GSE less than 1.5 knots.
2. Speed mode and/or flight level are not correct. If the GSE is greater than 1.5 knots, then I need to consider changing the flight level. For larger GSE errors, I need to consider changing the speed mode.
@TBill
I do not use Microsoft Flight Simulator. I calculate aircraft turns using an on-line Aircraft Turn Information Calculator from csgnetwork.com.
I was specific about the start point and timing of the turn at waypoint AGEGA (please see the attached table).
I was specific about the longitude and timing at the end of the turn being 93.760°E (please see the attached table).
The aircraft heads due south from the end of the turn (please see the attached table).
I do not know which of the many exact waypoint entries for the South Pole were used.
@Richard
You wrote “So there are a lot of variables which are changing independently in time from each other. The averaging of all these variables over 59 mins 55 secs differs from simply taking the difference between the start and end points. This results in the along track error of around 2.8 knots, what we have called the Ground Speed Error (GSE).”
The point is that in my understanding all these variables combine into a ground velocity vector which (multiplied by 1 minute delta_t) adds to the previous position. So I tried to illustrate in 2D (see link, already shared before) why I don’t necessarily agree that the averaging of the 1-minute GS and taking the difference between start and end point would differ. Unless the 1 minute time interval is too coarse (discretization error), or I misunderstand how you update the position for every minute flight time.
https://www.dropbox.com/s/36c4ks77gxhsz5o/20190824_211248%20%281%29.jpg?dl=0
@Richard
You have delivered on your hint. Great!
My cruder simulation has the turn at AGEGA within a minute (the difference likely being exactly where the turn time is located with respect to the details of the turn). Matching the BFO at 18:40 requires a descent with a max of about -3300fpm, which seems consistent with your table. I am sure you have investigated a number of related scenarios including constant Mach speed and that you find that the very best match to your criteria occurs with the set of parameters you state.
This path eliminates the need for a “loiter” or a more complex flight path associated with the pilot considering options while in flight. Over time most of us have come to agree that the pilot knew what he was doing, planed it and did it purposefully.
It nevertheless may be useful when you present the results to compare the best results with some very similar scenarios such as constant Mach speed so as to give the reader some idea of the practical aspects of your methodology.
BTW, this does not mean that I have abandoned the 186 path as a plausible result. The winds aloft on that path only become strong and from the west near the very end of the flight, and this is consistent with encountering the equator-ward edge of the jet stream. These are considered in detail in the computation which is done every 15 seconds.
@TBill
RE: ”I was jumping to the conclusion that putting more efficient engines on a older airframe means a compromise on engine placement, which could necessitate more reliance on anti-stall logic. You are suggesting Airbus anti-stall logic is standard, unlreated to engine physics. OK got it, but I wonder about that.”
That was certainly the case for the B737, because the airframe was originally designed with the JT8D engine, which is much narrower than the later high bypass turbofans. Consequently, it has little ground clearance and when the aircraft was subsequently fitted with the wider CFM56 engine, the designers were forced to mount the engines further forward and higher on the wing. The CFM LEAP engine fitted to the MAX is wider again, which resulted in the engines being mounted even further forward and higher again to ensure sufficient ground clearance.
The A320 airframe, on the other hand, was originally designed for the CFM56 or IAE V2500 turbofan engines. The designers did not need to make the same compromises when the aircraft was subsequently fitted with the wider engines of the NEO version. Indeed, the A321 aircraft that suffered the frozen AOA issue was a ‘classic’ version (ie not a NEO) and was fitted with the original IAE engines.
@Niels
The predicted model position is based on the Mach Speed Schedule, Aircraft Weight, Flight Level, Air Temperature, which give a TAS, and Wind Speed and Direction which give a Ground Speed and the Navigation Mode and Track which gives a new position after each Minute.
The best fit model position is based on the best fit to the Satellite data (BTOR and BFOR).
At each satellite handshake, there is a difference between the predicted position (aka Aircraft Performance and Weather data position) and the best fit position (aka Satellite data position).
@TBill
Further to my previous post, the envelope protection found on the A320 NEO family is pretty much the same as that found on the original version of the aircraft.
@Richard
Re: AGEGA
I had a chance to do 2 quick PMDG simulations, and so far it works they way I was thinking: If you say AGEGA to S90W000 (south pole) , regardless of turn radius, I think it goes 180 south at the waypoint.
Now then, I have to qualify that: in PMDG we get a turn that overshoots, but the flight path in PMDG curves back to the waypoint longitude and then goes 180 South. I am ignoring the overshoot and just looking for where it ends up.
@Richard
Ok, thanks! So if I understand correctly, the column called “Curved Path Length Lat/Lon (NM)” is based on the best fit model position?
Could you perhaps add those positions to the results sheet?
@Richard
Through skyvector distance calculation it looks like the “Curved Path length Lat/Lon (NM)” is based on the Latitude and Longitude columns included in the sheet. So what are those: “predicted” or “best fit”?
It is rather confusing; the related BTO values are labeled “predicted”.
I don’t know about the rest of you but I am just awestruck by the accuracy of these track angles. With seven decimal places, this plane can nail a target that is just 9.6970493 millimeters wide at a range of 3000 natical miles. Ain’t technology wonderful?
Good point Paul, worth making, and overdue in my view.
When I was at school (1960’s) there was a rule, about measurement accuracy, (or was it precision, not sure …) being half the smallest graduation of the measuring instrument (or something like that – it is so long ago !).
Modern technology is wonderful (compared to our 1960’s rulers), granted, but, seriously, can a modern – three orthogonal axes ring laser gyro based INS really measure down to six decimal places – of a (single) degree (to allow interpolation of the seventh) ?
So, are we now “blindly calculating ourselves to death”, so to speak, to no real, useful, avail ?
@Niels, @Paul Smithson, @Ventus45
I suppose we should be gratified that all you can complain about is too much precision and the nomenclature.
Nothing seriously wrong then, like MH370 is not to be found near 34.4°S.
Bobby, Victor and I work to a high precision internally in our models and have chosen a particular nomenclature.
Finding MH370 is not a schoolboy project.
I can’t help but feel if we worked to the nearest km or degree, we would also receive complaints for being inaccurate.
Imagine an auto land system calculating the touch down point on the centre line of a runway to the nearest km.
Or a spacecraft trajectory system to Mars working out the track to the nearest degree.
ARINC 429 uses a BNR resolution of 20 significant bits for time to the nearest 10 µs and position to the nearest 0.000172° of latitude.
I can see the next complaints coming as to what Fisher has to do with Probability when you thought we were gone fishing or the Modified Einstein Field Equation (MEFE) has to do with fuel.
You are dead if you do and dead if you don’t.
@Richard
I don’t know why, and I don’t like it that you address this last posting to me. I was not asking or complaining about precision and nomenclature, I sincerely try to understand what is what in the result sheets you shared. Depending on the explanations there could be something more serious to complain about than “precision and nomenclature”.
Can you please clarify if the Latitude and longitude columns in the sheets you shared are “predicted” (aka Aircraft Performance and Weather data position) or “best fit” (aka Satellite data position) values?
‘I suppose we should be gratified that all you can complain about is too much precision and the nomenclature.’
There’s nothing to complain about because the paper that has been trailed since 31 May, that was going to demonstrate how there is only “one true path” has still not issued. Just sayin’
@Niels
You stated “So what are those: “predicted” or “best fit”?
It is rather confusing; the related BTO values are labeled “predicted”.”
You are stating my nomenclature is not clear and confusing.
I have spent hours working on stuff for you.
That stops herewith, since all you can do is complain that I am not clear and confusing.
@Paul Smithson
Sorry I missed the complaint that the next paper is not yet published.
The first paper and 1,260 comments since can be ignored, of course.
Let me complain back to you, when will you be writing a paper?
@Paul Smithson, @Ventus45: When numerical results are presented for comparative purposes, there is nothing improper in reporting those results with more significant digits than the actual precision of the result. We are comparing numerical methods as much as we are discriminating among hypothetical routes. If the result is more important to you than the method, simply round the result to whatever precision you think it is appropriate.
@Richard,
1) I am not the one asserting that I have found the one true path, am I? So I think the monkey is rather on your back.
2) Your first paper introduces the methodological approach. It does not provide the results and discussion (ie the demonstration that a singular and unique solution is empirically demonstrable). Those results are awaited with interest.
@Victor,
I can understand that you might wish to specify lat/long to 3 decimals (approximately 100 metres) and track angles to two, possibly three decimals for the purpose of comparing BTO residual results from two models +/- 1 microsecond, or in order to identify the absolute peak of a probability distribution.
However, specifying lat/long to 7 decimals (about a centimetre), headings to 7 decimals (hit a dime at 3000 NM range), windspeeds or groundspeeds to 3-4 decimals(which cannot possibly exist for more than an infinitesimally small moment of time) is plainly absurd and unnecessary. What I object to is the spurious “precision” that this decimal diarrhoea implies when no such precision exists or is of practical (or even theoretical) consequence.
@Victor
…fyi seems like neither FS9 PSS777 nor FSX PMDG777 accept SPOLE as a waypoint.
@Paul Smithson
I no longer believe you, when you state “Those results are awaited with interest.”
What you are waiting for, is another opportunity to complain and criticise.
You stated “My preferred route, as previously mentioned is ~191 and ends just shy of 40S.”
We do not agree with your preferred flight path and you want to stop any discussions of an alternative solution, such as the one we are proposing, a LNAV180 LRC FL390 to 34.4°S.
That is the main reason, why the paper is delayed. We want to make sure that the major criticisms that you and others have made, have been answered in full.
@TBill: According to Boeing, the waypoints 99SP, S90EXXXXX, or S90WXXXXX all can be used for the South Pole. I have used S90Exxx many times in the PMDG 777.
@Paul Smithson: Did you read my response? When comparing numerical methods, reporting a result with high precision is often helpful in finding numerical errors, even though we know that the precision is not an indication of the accuracy of predicted path. Live with it.
@Andrew
OK thank you.
By the way, did you see this about a little issue on the NEO (re: Lufthansa no longer sells the last row of seats on its Airbus A320neos to address concerns about the aircraft’s center-of-gravity limitations)? (I am not suggesting this is relevant to MAX).
https://twitter.com/Satcom_Guru/status/1172153889535090690?s=20
@TBill
Thanks, I hadn’t heard about that issue, which affects both the A320neo and A321neo. The airworthiness directives were issued on 31 July::
https://ad.easa.europa.eu/blob/EASA_AD_2019_0189.pdf/AD_2019-0189_1
https://ad.easa.europa.eu/blob/EASA_AD_2019_0171_R1.pdf/AD_2019-0171R1_1
Further discussion here:
https://simpleflying.com/excessive-pitch-problem-on-second-a320-family-aircraft/
Unfortunately I haven’t yet found the Airbus Flight Operations Transmission (mentioned in the AD) that describes the issue in more detail. I’m not sure, but it might have something to do with the slightly lower thrust line of the larger engines on the neo aircraft. It will no doubt be fixed by a new flight control software standard.
BTW, re the FMS naming convention for the poles, the North Pole can be inserted as NPOLE, but the South Pole cannot be inserted as SPOLE. It must be inserted as Victor described.
@Victor
“…According to Boeing, the waypoints 99SP, S90EXXXXX, or S90WXXXXX all can be used for the South Pole. I have used S90Exxx many times in the PMDG 777.”
Re- FSX/PDMG: What is meant above by xxx? Any 3 digits?
I do see that S90W000 and S90E000 work. 99SP does not seem to work.
Re- FS9/PSS777 (ZS sim studies): Nothing working well so far. The FMC will accept S90E000 but the aircraft goes north. If you enter S90W000 the FMC changes that to S90E000.
Andrew: “The ‘fix’ was to turn off two of the aircraft’s three ADRs (Air Data Reference), which forced the flight control system into direct law”
Is there no way to select Direct Law directly ?
@Richard
You wrote:
“You are stating my nomenclature is not clear and confusing.”
You reduced the discussion to the level of (complaining about) nomenclature. It is worse: The totality of the discussion reflects my growing doubts about the soundness of your methodology/calculations. I regret we cannot bring that discussion to a conclusion.
@All
I realize if I want to progress with my analysis from now on I have to switch to plan B, which is the development of my own great circle path evaluator. It’s not a real big deal but I’m not sure it will happen. I feel I have done my part.
I’m mostly looking forward to the results of the analysis Don Thompson is carrying out. I think it is the most important missing link at the moment.
I’m rather sceptical about the alleged uniqueness of the 180S path. While the general indicated area looks ok to me, it carries the risk of resulting in scanning a too narrow latitude range.
It may come as a surprise: I’ve decided this will be my last contribution here. I will stay involved, but in other ways. Best to all of you.
@Peter Norton
RE: ”Is there no way to select Direct Law directly ?”
I previously said that turning off two ADRs forces the flight control system into direct law, but that was incorrect. The procedure forces the system into alternate law with no pitch protection. To answer your question, the flight control law reconfiguration is automatic, depending on the level of system failure. Alternate or direct law cannot be directly selected.
@Victor.
Your assessment published.
https://www.dailystar.co.uk/news/world-news/mh370-finally-found-new-search-20059399
@DrB
Bobby, would it be possible for you to provide the sensitivities for the various variables versus the assumed starting state (ie remaining fuel and gross weight) please? As a quick and dirty, taking the LNAV180 LRC FL390 34.4°S route how does say separately each of ±2.5°C, ±5 knots headwind component, FL±020, CI±50, Track±1° impact the BTOR, BFOR, PDA outcomes versus say Fuel/Gross Weight ±1,000 kg?
@Don Thompson. Your, ….”My findings, to date, indicate that the post-acquisition workflow to analyse data produced by this survey was not as comprehensive as that carried out under ATSB’s contract with Fugro.”
Intruding into your work looking into seabed wreckage detection probabilities in the area of interest would backscatter or somesuch indicate reliably that there was a muddy bottom such that reduced target detectability could be fed into outcomes, or, if in real time, adjustments to search patterns could be made?
Mud might gather for example in hollows in a “hilly” bottom.
Related, depending on aircraft descent speed and attitude less dense parts of the wreckage might glide and drift during their slow or delayed underwater descent, leaving just the densest items in a detectable field, yet these are the items most likely to penetrate the bottom.
Are these plausible contributors to the wreckage having remained undetected?
@DrB
Sorry Bobby, I made a blue in that wish-list. Rather than CI±50 could you show the effect of CI=52, the default MAS setting.
@David: In the past, I’ve asked reporters from the Daily Star to not use my name in their stories. The work led by Bobby, not my comments, is the real story, and even that is premature to report until the paper is published.
@Niels
I agree, it was wrong of me to treat your genuine attempt to get to the bottom of Ground Speed Error (GSE), as a complaint about the nomenclature, that we have chosen and I apologise.
I have obviously failed to communicate what GSE is and that is also my fault.
Please allow me to try one more time to explain GSE.
Arinc 429 specifies a present position update rate in a Flight Management System (FMS) of 250 ms minimum and 500 ms maximum. At 500 knots an aircraft has flown 0.07 NM or 128.6 m in 500 ms. Waypoint Bearing and Cross Track Distance update rates are between 31.3 ms and 62.5 ms. Altitude update rate is between 20 ms and 40 ms. Wind Speed and Direction is also updated between 250 ms and 500 ms, like present position.
The Required Navigation Performance (RNP) of commercial aircraft can range from a maximum error of 4 NM in Oceanic Airspace to 0.1 NM in the RNP approaches and departures following curved paths below terrain level. So the information update rate of present position on an FMS of every 0.07 NM will support a RNP of 0.1 NM.
I update present position in my flight model every 60 seconds. If I updated present position every 250 ms, it would be more realistic. When I am interpolating GDAS data provided every 3 hours to the nearest minute, I am already stretching the GDAS accuracy. So I decided 1 minute intervals were the compromise choice for updating the predicted present position in my model.
When flying between waypoints in LNAV mode, the FMS will continually update the present position, but the Wind Speed and Wind Direction will blow an aircraft off course. The distance off course is called the Cross Track Error (XTE). LNAV regulates the XTE, but it is almost never zero. The aircraft never truly flies a straight path. The Along Track Error (ATE), which relates to what we have called GSE, is the error to meet a specified transit time between two points. In our case, the two points are defined by satellite handshakes and the transit time is therefore known. The ATE is determined by predicting the transit time, transit distance and transit Ground Speed from the Speed Mode, Mach Schedule, Air Temperature, TAS, Wind Speed and Direction. The difference between the required transit time and the predicted transit time, determines the delta transit time, which for a known distance between satellite handshakes can be expressed as a speed. This is what we call Ground Speed Error (GSE).
The GSE is a measure of the fit of a transit to the required transit time (based on satellite handshake times) and the predicted transit time (based on aircraft performance and weather data) given the Speed Mode, Flight Level and GDAS data.
Knowing the accuracy of the GDAS data allows us to make an assessment of a particular Speed Mode and Flight Level for a particular flight path in a particular navigation mode and on a particular initial bearing from a given starting point. Small changes to find a best fit between the required transit time and the predicted transit time can be made by modifying the Flight Level, large changes by modifying the Speed Mode.
The GSE is a useful indicator as to whether a best fit flight path has been found. Together with other indicators such as standard deviation BTOR, standard deviation BFOR and Fuel Range/Endurance, it is possible to make an overall assessment of a flight path. Bobby has taken this further by additionally assessing a number of correlations between the various indicators of a best fit flight path.
@David
Many thanks for passing on the Daily Star article.
In addition to the Daily Star using Victor’s name without his permission, I note they include an image based on a graphic showing the OI Seabed Constructor’s track through the search area around 34S, that I published on Victor’s website, but also published in the Daily Star without my permission, claiming it to be their own image.
@Richard
Yes, a very poor article. Certainly not representative of the people I have come to know.
An example of the sad state of journalism.
@Victor
I find it potentially interesting that FS9/PSS777, used in ZS sim stuies, apparently has a polar waypoint limitation. According to one online discussion, FS9 had a map limit of 89.3. We could perhaps speculate that ZS used NZPG or its coordinates in his home flight sim work as a fallback, but in reality he was planning due south course in the real aircraft.
I do tend to favor 180S at least until about Arc5, but I tend to prefer CTH or CMH flight mode.
Still fiddling with it. But that would say the ZS sim studies were actually to NZPG but perhaps as a work-around. Otherwise we have to say ZS manually placed the aircraft smack dab at 40S exactly on the LNAV line to NZPG strictly by chance.
The other way ZS could make the older PSS777 model go due South is via waypoints eg; 0894S 0694S then discontinuiuty heading due South with his choice of Mag/True and/or Track/Heading.
Correction above: should be 0894E 0694E to go due south
All of this mode discussion is confusing me. Let me start with the presumption (based on DrB/Richards studies) that the basic navigation mode is LNAV, what happens at a discontinuity?
Does the plane continue on the same GCP projected ahead by the nav system?
Or does it switch to the mode that happens to be set on the FMC dashboard?
The latter, to me seems unlikely as the action would be somewhat arbitrary based on the switch position. You could argue that the switch positions are a standard configuration, but….
Sorry for wasting bandwidth…
@Niels: which other ways?
@Andrew: thank you.
Just as a reference for other readers, the topic is also discussed here:
http://www.airliners.net/forum/viewtopic.php?t=748133
@all:
As undergoing efforts seem to point to 180T, what could be the reason/explanation ?
Andrew said he does not see a non-nefarious explanation.
But if this was an intentional move, wouldn’t it betray MH370’s final resting place if the FMT had been captured by radar (which the pilot couldn’t exclude with certainty, or could he?) ?
The characteristics of the known flight path suggest that one of the pilot’s goals was to disappear the plane (because otherwise he could have crashed it right away). Flying 180T without any maneouvres runs contrary to this goal.
@Sid Bennett: When in LNAV mode, upon reaching a discontinuity, the plane maintains that heading (i.e., not the track). We believe that if the HDG REF switch is set to NORM, it maintains a constant magnetic heading. If set to TRU, it maintains a constant true heading. It does NOT continue on the great circle path.
https://www.dropbox.com/s/qb2ol8gftcgz7eu/agega_sensitivity_studyt.pdf?dl=0
Nothing new here…
I had been interested in the sensitivity of the AGEGA+180 path to minor changes in such things as start time, start location and initial azimuth.
So I used Barry’s model and this paper contains some hand tabulated data.
The most clear cut dependency is on azimuth and that makes sense if it is a segment of a likely path.
This is a very limited application of the techniques that I used to establish the turn time and azimuth for the 186 path.
There are probably only a few simple paths that will survive close scrutiny.
What is the true path? We don’t know and won’t know until the plane is found. So let’s continue to pursue the models in the hope that further insight can be gained.
@Peter Norton said “But if this was an intentional move, wouldn’t it betray MH370’s final resting place if the FMT had been captured by radar (which the pilot couldn’t exclude with certainty, or could he?) ?”
I believe he could; by knowing the operational state of the Sabang TNI-AU SatRad 233 unit. ZS apparently knew the unit was either non-operational at night, and in particular overnight Friday/Saturday. What he probably didn’t know was whether Indian naval units based at Port Blair would be maintaining a skyward radar watch over the nation’s eastern border region.
What he wouldn’t have known, would be the location and or operating areas and times of the RSAF Gulfstream 550 aircraft equipped with the Israeli Phalcon radar system. They are known to venture into the Bengal Sea area and are capable of doing so well above the High Level airways. In other words ‘incognito’, except for being observed by PSR units. Likewise, a good time for them to venture forth when surrounded by Muslim states, is overnight Friday/Saturday.
The escape into the Indian Ocean would have been well planned. Exactly how he was going to avoid the ‘unknown’ along with Thailand primary radar, has resulted in the ongoing conjecture of how to join the 18:28:12 BTO Arc (position line) along with the 18:22 Western Hill PSR return to a potential 180°T LNAV track passing near BEDAX that places the aircraft on an intersect with the 19:41:03 BTO Arc.
More to follow on this later …
Correction ..
The above should have been – ‘
eithernon-operational’@Barry Carlson:
thanks for your comment.
Regardless of the actual likelihood of a radar capture,
why take this risk in the first place ?
If the intention was to disappear the plane (which the characteristics of the known flight path suggest), flying due south in a straight line defeats this purpose somewhat – particularly if there is a risk that the starting point might be captured by radar or revealed otherwise (spotted from a ship or another aircraft, etc.) …
@Barry Carlson
You said, ‘… by knowing the operational state of the Sabang TNI-AU SatRad 233 unit. ZS apparently knew the unit was either non-operational at night, and in particular overnight Friday/Saturday.’
Is there any evidence to support that or is it just conjecture?
@Peter Norton;
“Regardless of the actual likelihood of a radar capture,
why take this risk in the first place ?”
I have always presumed that the plan was to clearly indicate the aircraft was ‘going North’, then take whatever action was needed to avoid further detection. That action resulted in a kind of back-track that has resulted in the aircraft not being detected after 18:28:12 UTC in the Andaman Sea area – ignoring the Kate Tee supposed sighting(s).
The SatPhone calls circa 18:30 ~ 40 gave BTO data that is not particularly useful, i.e. it provides a multitude of options that can lead to assumptions regarding the Heading, GS and +/- ROC. Richard’s proposed track to AGEGA with a turn back to the South is one of them.
Many, many Moons ago, I concocted a track that resulted in the aircraft commencing a descent at around 18:30 UTC with at GS and RoD that kept it on the N571 airway to be level at FL015 and KTAS 250kts before IGOGU. It then passed through the strait to the north of Great Nicobar before commencing a LNAV track to YWKS {Wilkins Field). Such a scheme came apart when the 19:41:03 BFO wouldn’t fit. Those were the days when an assumption (there’s been heaps of them!) was made that SatRad 233 at Sabang was operational –
http://mh370.countjustonce.com/images/mh370-chennai-deviation.jpg
… and 1500ft was needed to avoid radar ‘over the horizon’ detection at 100NM amongst the shipping clutter on the actual sea horizon.
However, giving those with an interest in your whereabouts the ‘slip’ is a well tested ploy. It can work, and in the case of MH370 it has been of continuing interest in reaching a ‘most likely’ solution as to its eventual location.
As I stated earlier; more to follow…
Correction again..
calls circa 18:30 ~ 40 gave
BTOBFO dataRe: Radar
We did also have the Singapore airborne radar aircraft apparently collecting some data around Malacca Straits/Andaman Sea that has not been shared publicly.
@Peter Norton
If you hold to the passive flight assumption, then 180S is probably the apparent mathematic solution, assuming BFO’s are correct with no drift.
If we allow for active flight and some BFO drift, the answer probably moves over to 30S or so (as the most apparent mathematic solution with other possiblities).
@Mick Gilbert;
Re: ZS apparently knew the Sabang SatRad 233 unit was non-operational at night, and in particular overnight Friday/Saturday.
You asked,”Is there any evidence to support that or is it just conjecture?”
No. I don’t know what ZS ‘knew’, and if anyone does know the answer to the question, they so far haven’t revealed it.
I have noted that @Don Thompson has discovered that the more remote SatRad units have had maintenance and operational issues for a good few years. In the case of unit 233, it is accessible via a road/track and by helicopter, but located on Pulau Weh makes it an outlier from the rest of Sumatra.
Islam is by far the most prominent religious faith observed in West Sumatra, and for working men Friday evening prayers are the most important part of their faith.
In short, “conjecture” !
On the other-hand, the official Indonesian response to questions on MH370 has been, “We saw nothing”. In that respect, I believe they are being honest.
@Barry Carlson
Thanks Barry. We know from the Factual Information report that at least one TNI-AU radar was active on the Friday night:
‘d) Medan Indonesia Radar
… The Military however admitted that they picked up MH370 earlier as it was heading towards waypoint IGARI. No other information was made available.’
That was most likely Satrad 232 Dumai.
Right from the get-go Indonesian Defense Minister Purnomo Yusgiantoro was making statements to the effect that their radars were operational and detected nothing. I also note that it took a pretty detailed search over a couple of years of public records, data and even social media to determine the likely times of operation of the TNI-AU radars and only five years after the aircraft went missing did Richard turn up a recently published paper suggesting that some of the TNI-AU radars were operating with degraded capabilities.
I think it is drawing a long bow to suggest that Z had somehow managed to adduce the operational status and capabilities of TNI-AU radars (such that he was willing to make critical manoeuvers within the publicly available radar ranges) without leaving a trace of his research.
I copied this from a submariner’s forum.
Here are the basic rules of publicly available information about submarines in general, but particularly about submarine casualties, regardless of nationality (notably American and Russian, but especially British) :
1 = The official story is never, ever what actually happened. It may be mostly true with technologically sensitive, operationally sensitive, or embarrassing parts redacted, or it may be a complete fabrication, or it may well be something between those two extremes, but it won’t be the truth, the whole truth & nothing but the truth.
2 = Based on #1, stories that differ from the official version may or may not be true, and while that ambiguity can give rise to silly conspiracy theories, the desirable outcome of #1 is that even the most completely accurate retelling of the whole unvarnished truth can be summarily dismissed as just another silly conspiracy theory.
3 = After reading #2, thoroughly re-evaluate anything and everything you have heard from the Russian, American and/or British governments about your question, then ask yourself whether any answer posted here in public is likely to be satisfyingly accurate.
Have a nice day!
To that I would add, that in my opinion, rule #1 has been in play from day one, and specifically, ever since the RMAF chief gave his comical presser, re the 18:22 hit, repeatedly emphasising …. “I am not saying it is MH370 – OK”.
The three most suspect “apply rule #1” probable fabrications are therefore:
(a) the alleged RMAF Western Hill 18:22 hit,
(b) the alleged / presumed Singapore Gulfstream AWAC mission coverage, that allowed the generation of ……
(c) the ATSB’s deduced most NW limit.
@Ventus45;
The ATSB will have done as much digging as is possible via diplomatic channels to confirm the authenticity of the data that has been made public. They may also be privy to other information, which they would have factored into their determination of the areas to search. They don’t need to tell you and me of those background facts (if they exist), but I doubt they would even try and convince the Australian Federal government to finance something that wasn’t based on the best evidence available.
The basic facts are:-
1.. 9M-MRO passed PENANG and headed toward VAMPI and beyond, i.e. heading WNW.
2.. Satellite handshake data determined that by 19:41:03 the aircraft was heading in a southerly direction, and subsequent analysis of the BFO component of other SAT transmissions have allowed the narrowing down of a possible/probable track that was taken.
3.. No fiddling with the available data gives a fit to the aircraft going in some other drastically different direction.
4.. There is one person who ‘knows’ what happened, but chose not to reveal the finer points of his plan.
@Mick Gilbert
That’s something I’ve been struggling with for a while.
The actions of the perpetrator suggest to me that they did not see interception by the military as a problem.
Following on from that, that could involve a) no detection by radar or b) detection but no action taken.
The thing troubling me about scenario a) is how would he know?
I can imagine a few ways but it’s all conjecture…
@Barry Carlson
We do have one piece of data between 18:22 and 19:41 that requires an explanation. It is the BFO at the time of the first telephone call attempt at 18:40. There are (at least) two proposed explanations that can fit the data:
a) the turn at IGOGU at the time of the FMT
b) a descent at 18:40 on the path NILAM-AGEGA with a descent rate of about 3000fpm
c) ????
You may not accept the particular associations that I have given in explanation, but something happened and should be integrated into a scenario.
@Sid Bennett;
You said, “You may not accept the particular associations that I have given in explanation, but something happened and should be integrated into a scenario.”
There’s nothing I have against your associations, in fact I have already shown an old proposal that involved a descent commencing circa 1835 on the N571 airway toward IGOGU.
My conjecture is to use the same FLCH mode descent on the N571 to level at around FL030 at 275KTAS with a turn south commencing about 5NM before IGOGU to NOPEK, then a climb toward BEDAX. The final turn to LNAV 180°T, i.e. S90W000 is entered in the FMC on crossing BEDAX and selected about 1 minute later.
The vertical profile will have BEDAX crossed at about FL275 and with the aircraft using step climbs will have 156NM to run to intersect the 19:41:03 Arc level at circa FL355 at the assumed Mach for the proposed track. The initial airways to be crossed could have Gulf states / European bound flights, so the vertical separation on crossing will need to be managed.
Strangely, the final turn onto 180°T is due West of PENANG !
https://ngamotu.nz/mh370/mh370-connect-track.html
In summary, the time is utilized with descent/climb and overall slower speed than the deviation via AGEGA. Hopefully, DrB’s fuel model will also fit.
I can not see a reason for descending at all, if avoiding detection by Sabang Radar was the intent. That radar has very good coverage, almost down to the deck.
It clearly would not have worked.
Bearing, Range and Radar Lower Limit from Sabang Radar to your waypoints.
Way_pt Degrees N-miles Rad_ft
Vampi 084 142 8,750
Mekar 065 83 1,450
Nilam 041 68 580
Igogu 334 109 3,950
Anoko 327 89 1,950
Nopek 312 65 480
Bedax 251 92 2,200
@Barry Carlson: Have you considered whether the descent was to reach a flight level that avoids enroute traffic?
@Barry
My version of that path is:
MEKAR NILAM 0796E 0894E ISBIX
with descent prior to 0894E.
My only claim is that is most simple way to approximate it consistent with the proposed offset at 1825. Your option works, AGEGA option works nicely it appears, and Captio works.
All of these ideas get the aircraft just-north-of-ISBIX by 1941, which is the basic requirement of the 180 South path proposals.
@Andrew
On the B777 question: what devices can be turned off from the cockpit?
You have previously advised me that the DFDR is on batt back-up, so I take that to mean I cannot shut DFDR off from the cockpit.
How about the CVR voice recorder? Does that have batt back-up too?
I am discussing with B767 pilot Ed Baker on Twitter who has raised this question, and I do not recall anyone ever suggesting MH370 CVR was batt back-up too.
@Barry Carlson
Thank you for the skyvector plot with times. That helps me understand the proposal.
For me, the key question is “how do you explain the first telephone call BFO?” It occurred at 18:40.
Victor has reminded us that there are two (at least two?)explanations consistent with the satellite data. The turn and or a descent. I have not looked at the possibility that a change in speed could also be involved.
Having said that, you reach IGOGU at 18:49, so the observed event at 18:40 has already occurred on the NILAM-IGOGU leg. The descent would have been observed if it occurred about 18:40, but the turn at 18:49 would not. When the plane climbed again is also unobserved, but could be at any time consistent with the fuel consumption model. One assumes that the reason proposed for the descent can be one or avoidance of traffic (a low probability event) or the avoidance or radar. In the pilot’s mind, the latter is plausible as he would have no assurance that the radar was inactive.
The pilot would have no onboard equipment to determine if the plane was being observed by a radar depending on skin echoes.
@TBill
RE: ”You have previously advised me that the DFDR is on batt back-up, so I take that to mean I cannot shut DFDR off from the cockpit.”
The FDR is powered by the 115V AC R Transfer bus. DC power is also required from the 28V R DC bus for the power control relay that controls AC power to the FDR. There is no battery backup (Did I really say it has a battery backup??).
RE: ”How about the CVR voice recorder? Does that have batt back-up too?”
The CVR is powered by the 115V AC L Transfer bus. Again, there is no battery backup.
Neither recorder can be directly controlled from the cockpit. However, it is possible to remove power by disabling the respective side of the electrical system.
@Sid Bennett Re: “The pilot would have no onboard equipment to determine if the plane was being observed by a radar depending on skin echoes.”
I can’t remember from my days of flying, but if the transponder is in SBY mode, does it not flash a green (?) light each time a radar sweep is detected?
@Shadynuk
I do not pretend to be an authority on the details of the ATC, but the consensus is that it was OFF during this period of the incident. The plane disappeared from the SSR at about the time of the diversion. The PSR does not employ ATC although it might use IFF 🙂
@Sid Bennett
@Shadynuk
The transponder mode selector in the B777 has a STBY position, but no OFF position. In STBY, the transponder is disabled. The transponder panel does not have a light that flashes when a radar sweep is detected, in STBY or any other mode.
@Sid
One assumes that the reason proposed for the descent can be one or avoidance of traffic (a low probability event) or the avoidance of radar. In the pilot’s mind, the latter is plausible as he would have no assurance that the radar was inactive.
The point I was trying to make above, is that the pilot would have to be below 4,000 feet at Igogu, for that to be a plausible reason (in his mind). Furthermore, even after turning south, he would have to descend even further, virtually to the deck, in fact, to be below 500 feet at Nopec, to remain hidden from Sabang Radar.
It may have been possible (there were no weather reasons against descend in that area in that time frame) but is it really a plausible plan ?
Martin Withers took the Vulcan down to 300 feet on the run in to Port Stanly, but …….. in a B777 ?
Tim Vasquez – Weathergraphics:
http://www.weathergraphics.com/malaysia/new-ir1-anim.gif
http://www.weathergraphics.com/malaysia/index.shtml
@Sid Bennett;
You said,”One assumes that the reason proposed for the descent can be one or avoidance of traffic (a low probability event) or the avoidance or radar. In the pilot’s mind, the latter is plausible as he would have no assurance that the radar was inactive.”
The scenario I proposed was, as stated previously, on the basis that ZS knew that the Sabang TNI-AU unit 233 would not be operational. The descent was to ensure that any Primary Radar captures, e.g. Western Hill PSR, SatRad unit 232 at Lhokseumawe, or Thailand PSR units had no indication that the aircraft had gone anywhere other than WNW on the N571 airway.
As you have stated, a descent for traffic avoidance is a low probability event, as at this time of day there is very little traffic and ZS would have been monitoring the appropriate Lumpur Control VHF sector frequency. Likely there was only one controller covering all the sectors and the various VHF sector channels were pseudo linked, whereby the Controller triggered all the channels, and likewise an aircraft received on a sector frequency would be relayed on all the linked channels. The simple way of preventing missed comms due to blocking.
It is suspected the aircraft was at FL430 passing Koto Bharu and may have been descending at 100 / 200 ft/min in order to maximize the airspeed / thrust ratio, i.e. operating right on Vmo. That being the case the aircraft was already at FL300 by MEKAR. The decision to go low and carry out the back-track manouevre was the trigger for switching the LH Transfer Buss ON at about 18:24 – evidenced by the 18:28:12 BTO. This action was followed by switching both packs back on to repressurize the cabin. Crossing NILAM at a non standard level and reducing thrust to start the drift down, then when appropriate at about 1835 commenced the descent proper in FLCH mode at around 2600ft/min (from memory). That would have been captured in the 18:39 ~ 1840 BFO’s from the unanswered satPhone calls. About this time the cabin pressure altitude was back at normal and the O2 mask could be taken off.
The net result was the aircraft was kept well away from land, so wouldn’t be heard, whereas the only persons likley to hear it over the water would be those on becalmed yachts – others on motorized shipping wouldn’t have heard it due to, propulsion, relative wind, and sea noise. The only thing to be seen would be the exhaust gas glow from the engine tail pipes, possible if it climbed directly away from you.
@Ventus45;
You said,”I can not see a reason for descending at all, if avoiding detection by Sabang Radar was the intent. That radar has very good coverage, almost down to the deck.”
I don’t know why you’re persisting with the “avoiding detection by Sabang Radar” theme.
There is no known evidence that Sabang was operational; neither is there to the contrary. Indonesia have stated what they saw, and other than that, they are not likely to admit that various radars were not operational.
If ZS had made it his business to find out the current status of Sabang Radar, he probably had contacts in the right places who would oblige. The foregoing conjecture on my part, is on the basis that ZS knew that the Sabang TNI-AU unit 233 would not be operating.
@Victor Iannello:
You asked,“Have you considered whether the descent was to reach a flight level that avoids enroute traffic?”
Apologies for the tardy response. Yes, and for reasons given in more recent posts, I believe that ZS had that circumstance under control.
@Barry Carlson: Captio has an interesting video that shows that MH370 might have performed the lateral offset maneuver in response to oncoming traffic, albeit at a different level. Both the offset and descent might have been related to traffic avoidance.
https://www.youtube.com/watch?v=goD03V1wxKE
@Sid Bennett
@Shadynuk
For completeness on that radar detector thought, years ago there was some discusson if the pilot(s) might have brought a radar deterector on the flight. I have no idea if that idea is feasible, but I include it on my list of possible tools used.
@Barry Carlson
I can accept the descent rate of 2600fpm as reasonable as I had previously estimated 3000fpm on the NILAM-AGEGA path.
Do you know the maximum displayable range for the radar that is purported to have made the 18:22 detection? Was this point at the maximum radio range to a height of (whatever…37kft) in a standard atmosphere. I believe that in tropical atmospheres, there are anomalous refraction effects (e.g.) ducting that can extend the detection slant range considerably. This would be known to someone who used VHF communications. So, it might indeed be plausible for a descent to be made prior to any significant change in flight path so as to ensure that the further diversion was not observed (by radar).
@Andrew
re: “…. There is no battery backup (Did I really say it has a battery backup??)”
Maybe I did not understand correctly.
Let me ask the question more clearly (hopefully)-
(1) Flight Data Recorder
Let’s say the pilot wanted to turn off the DFDR (Flight Data Recorder) at IGARI, which is my hypothesis. (a) Can the DFDR be turned off from the cockpit overhead electric panel? (b) If so, what buttons do I need to push?
(2) same as abive for CVR, but I am a little less focus on that.
My (deniability) hypothesis would be intentional depressure at IGARI with some attempt to hide that data, or make it look like that action was needed. I assumne Victor is correct about about A/P back on at Penang, so I speculate any DFDR outage could be temporary to cover-up nefarious acts.
A new article from the William Langewiesche on the 737 MAX crashes. I don’t have an account with the New York Times, but others here might.
https://www.nytimes.com/2019/09/18/magazine/boeing-737-max-crashes.html
@Sid Bennett;
You said,”I believe that in tropical atmospheres, there are anomalous refraction effects (e.g.) ducting that can extend the detection slant range considerably.”
The Western Hill PSR target at 18:22 would have been over the radar horizon at FL300. @Don Thompson posted the following comment in 2017.
https://mh370.radiantphysics.com/2017/02/04/why-we-need-data-withheld-by-malaysia/#comment-63
So the lower you go, the less likelihood of ‘OTH’ detection by radar capable of that range – albeit with the target at higher altitude and within the time-base selected range.
@Victor
Rather controversial MAX article? Apparently I got sucked into the trap of believing the media narrative?
@Barry Carlson
Perhaps I did not pose my question adequately.
What is the maximum range that is displayed on the radar screen. This would be the equivalent of the time delay of the maximum slant range capability of the radar?
The maximum slant range would encompass the entire range that could be detected under any ducting conditions,independent of altitude.
@Sid Bennett;
You said,”The maximum slant range would encompass the entire range that could be detected under any ducting conditions,independent of altitude.”
I agree with you, and I thought I had said something similar.
I am not sure that anyone has actually determined the operation range of the RMAF Western Hill PSR, i.e. the equipment model etc.. @Don Thompson my have some info on that subject.
I have done a quick check of the distance between the 18:22 radar target position and to the Western Hill PSR.
Radar Target 1822 6°34’30″N 096°21’30″E
Western Hill PSR 5°25’28″N 100°25’03″E
The Vincenty distance is 252.2NM, which means the actual radar is greater and could be 256NM.
@Victor
An excellent article by William Langewiesche that, amongst other things, highglights a growing problem in the airline industry – poor pilot training and proficiency. At one point he argues that the manufacturers, particularly Airbus, have contributed to the problem by trying to make their aircraft ‘pilot proof’:
“What we had in the two downed airplanes was a textbook failure of airmanship. In broad daylight, these pilots couldn’t decipher a variant of a simple runaway trim, and they ended up flying too fast at low altitude, neglecting to throttle back and leading their passengers over an aerodynamic edge into oblivion. They were the deciding factor here — not the MCAS, not the Max. Furthermore, it is certain that thousands of similar crews are at work around the world, enduring as rote pilots and apparently safe, but only so long as conditions are routine. Airbus has gone further than Boeing in acknowledging this reality with its robotic designs, though thereby, unintentionally, steepening the very decline it has tried to address. Boeing is aware of the decline, but until now — even after these two accidents — it has been reluctant to break with its traditional pilot-centric views. That needs to change, and someday it probably will; in the end Boeing will have no choice but to swallow its pride and follow the Airbus lead.”
I suspect the problem will get a whole lot worse in the coming years, particularly if Boeing’s forecast of a looming global pilot shortage comes true and thousands of inexperienced and perhaps poorly trained pilots enter the system.
@Barry Carlson
What I am looking for is the maximum range that can be displayed on the scope. It does not depend on altitude or RCS. All we are given is a purported location at 18:22.
There were some comments recently on the Lido hotel data and it has always concerned me that the track extended to the left edge of the slide. How far further? “Trust me…. 18:22”
I also recall that, when inspected carefully the points on the track are time tagged. Has anyone tried to determine the time tag at the edge of the slide? (In another aspect, the gap in the track has been commented on recently (I can’t find the post just at the moment) and are the time stamps consistent. They resolution of the photo may not be sufficient.
Back on 4/3/2019, Victor published ADS-B data that had been collected by a receiver at a station in Terengganu. At the time I was unaware that the station even existed. However, its existence was not secret. The following link is to an article on the DCA website from 2 years ago describing the state of ADS-B at that time. It turns out that the Terengganu station has been in operation since 2008.
http://aip.dca.gov.my/aip/eAIP/2017-09-07/html/eAIC/WM-eAIC-2017-03-en-MS.html
[Apologies if this is a repost of known information.]
Debris update:
The #2 Engine Vortex Generator baseplate has finally been delivered to Malaysian authorities. After being stuck in Madagascar for >2 years, it finally arrived via DHL to the Malaysian AAIB this week. Here is paper from 2017 describing the debris:
http://bit.ly/2mpNajH
Since that time, we have found evidence that the baseplate is from the aft end of the #2 engine cowling. I have always felt this debris has the potential to help estimate the impact energy. Hopefully AAIB will conduct some testing and analysis.
@sk999 wrote concerning “ADS-B data that had been collected by a receiver at a station in Terengganu”
It may be that the MH370 Safety Investigation Team was also unaware that the ADS-B station existed as none of their reports made any mention of it.
However, when I made enquiries about the Terengganu station a log was produced.
[I will catch up with other recent comments presently, I have just returned from a week’s travels.]
@TBill
RE: “(1) Flight Data Recorder
Let’s say the pilot wanted to turn off the DFDR (Flight Data Recorder) at IGARI, which is my hypothesis. (a) Can the DFDR be turned off from the cockpit overhead electric panel? (b) If so, what buttons do I need to push?
(2) same as abive for CVR, but I am a little less focus on that.”
The FDR and CVR are powered by the R and L transfer buses, respectively. There are no dedicated recorder power controls or circuit breakers in the cockpit; the only way to turn them off is to de-power the associated transfer bus. That can only be done by isolating the transfer bus from the backup power system and de-powering the main AC bus on the same side. That process has been described here on a number of occasions.
To remove power from the FDR, the R transfer bus must be de-powered:
R BACKUP GEN sw – OFF
R BUS TIE sw – ISLN
R GEN CTRL sw – OFF
To remove power from the CVR, the L transfer bus must be de-powered:
L BACKUP GEN sw – OFF
L BUS TIE sw – ISLN
L GEN CTRL sw – OFF
@Victor Iannello
Victor, thanks for sharing that NYT article. I’ll stick my head out and disagree with Andrew as to its excellence. While the article might have a general theme in highlighting an emerging flight crew competency issue more’s the pity William Langewiesche didn’t do just a smidge more research rather than simply sharpening the hatchet (a flight deck crash axe courtesy of Boeing?) he took to the Lion Air crew.
The first external hint of trouble came about a minute later, after a departure controller cleared the flight for a climb to 27,000 feet. Harvino asked the controller to confirm the airplane’s current altitude as shown on the controller’s display. The request was unusual, and it went unexplained.
Such a request may not be normal, but it certainly shouldn’t be viewed as unusual given the circumstances. We now know that Lion Air 610 experienced an AoA sensor fault on take-off that generated unreliable airspeed and unreliable altitude cautions. The Captain’s and the FO’s airspeed and altitude readings would have disagreed. Part of Boeing’s guidance for crews dealing with the erroneous flight instruments (Boeing Aero 08) is headed ‘Getting assistance from others‘. That guidance specifically recommends that once power and pitch has been set and the crew have developed a plan, ‘… the crew should seek help from air traffic control (ATC).‘. The section goes on to detail the assistance that ATC can provide with respect to altitude and groundspeed data.
Harvino requested a clearance to “some holding point” where the airplane could linger in the sky. The request was surprising.
… The controller asked about their intended altitude. Harvino answered 5,000 feet, which was strangely low and to this day remains unexplained.
There are a few mind boggling stupid passages in Langewiesche’s article and those are two of them. You have got to ask whether he did anything even vaguely approaching research into how a crew might approach unreliable airspeed/altitude on take-off. 5,000 feet is the lowest altitude in the QRH Flight with Unreliable Airspeed tables for level flight and the table is for holding speed (Vref40 +70).
If Langewiesche had bothered taking to any experienced B737 flight crew they might have told him that climbing to 5,000 feet and holding while the crew stabilised the aircraft and prepared to return and land could have been part of a properly considered plan. You can draw your own conclusions as to Langewiesche’s preference for portraying the crew’s initial actions as surprising, strange and unexplained rather than considered and cogent.
That’s a runaway trim. Such failures are easily countered by the pilot — first by using the control column to give opposing elevator, then by flipping a couple of switches to shut off the electrics before reverting to a perfectly capable parallel system of manual trim. But it seemed that for some reason, the Lion Air crew might not have resorted to the simple solution.‘
If the previous examples were just lazy journalism or a failure to consult more widely this piece smacks of a deliberate intent to unfavourably distort the facts.
‘Such failures are easily countered by the pilot — first by using the control column to give opposing elevator …‘ That initial corrective technique, sometimes referred to as ‘control column breakout’, is of course entirely consistent with the FCTM guidance that ‘the stabiliser trim commands are interrupted when the control column is displaced in the opposite direction.‘. However, as just about anybody with a passing understanding of the Lion Air and Ethiopian Airlines MAX crashes knows, when MCAS is running the control column breakout technique DOES NOT WORK!! Because MCAS is specifically designed to input nose down trim in conditions where pilots are applying back pressure to the control column, the control column breakout switches are disabled when MCAS is running.
‘… before reverting to a perfectly capable parallel system of manual trim.‘. Good grief! Has this bloke read the Ethiopian Airlines MAX crash preliminary report? Or watched the Mentour Pilot sim demonstration? Above about 280KIAS you need to have The Hulk on the flight deck for the manual trim system to be considered ‘perfectly capable’.
And in stark contrast to the bumbling incompetencies at Lion Air we have ‘The Max’s creation took place in suburban Seattle among engineers and pilots of unquestionable if bland integrity, including supervising officials from the Federal Aviation Administration.‘. Cue sound track of bluebirds tweeting.
That article seems to have Boeing’s grubby finger marks all over it. And is similarly curiously timed. I expect we will see more ‘jet good, pilots bad’ articles disparaging the Lion Air and Ethiopian Airlines crews as a prelude to the MAX being recertified.
@Mick Gilbert
Steady on, I think you’re being more than a tad harsh!
RE your comment: “Such a request may not be normal, but it certainly shouldn’t be viewed as unusual given the circumstances.”
No, but at that point the controller had no idea the aircraft had a problem. From the controller’s perspective, the request certainly was unusual. Harvino did not advise ATC of a problem until he was queried some time later, after he made another unusual request. ATC can provide all sorts of assistance to an aircraft in an emergency, but they need to know there’s a problem!
RE your comment: “You can draw your own conclusions as to Langewiesche’s preference for portraying the crew’s initial actions as surprising, strange and unexplained rather than considered and cogent.”
In the absence of a CVR transcript, we don’t know there was a ‘considered and cogent’ plan. The 5,000 ft altitude doesn’t necessarily mean the crew was following the QRH guidance for unreliable speed. Indeed, it could be argued that 5,000 ft is ‘strangely low’ for a ‘flight-control problem’, as was advised to ATC. In that light, the choice of altitude remains ‘unexplained’.
RE your comment: “However, as just about anybody with a passing understanding of the Lion Air and Ethiopian Airlines MAX crashes knows, when MCAS is running the control column breakout technique DOES NOT WORK!! Because MCAS is specifically designed to input nose down trim in conditions where pilots are applying back pressure to the control column, the control column breakout switches are disabled when MCAS is running.”
Opposing the runaway trim with a control column input is a standard technique for a runaway stabiliser in any aircraft, including the B737, with or without MCAS. Langewiesche’s comment has nothing to do with the ‘control column breakout’ feature of the B737.
RE your comment: “Good grief! Has this bloke read the Ethiopian Airlines MAX crash preliminary report? Or watched the Mentour Pilot sim demonstration? Above about 280KIAS you need to have The Hulk on the flight deck for the manual trim system to be considered ‘perfectly capable’.”
The aircraft would have been perfectly flyable using manual trim IF the cutout switches had been promptly selected and the speed had been kept under control. Neither of those actions should have been difficult to achieve.
RE your comment: “I expect we will see more ‘jet good, pilots bad’ articles disparaging the Lion Air and Ethiopian Airlines crews as a prelude to the MAX being recertified.”
I believe there is more than one side to this sad story, but to date the broader pilot training issues have been lost in all the opprobrium (rightly) directed at Boeing. Like it or not, but pilot proficiency is an issue and standards that we take for granted do not exist everywhere. Airlines usually get away with it, until they don’t.
@Victor. About the maintenance aspects, Langewiesche implies that the replacement Lion AoA sensor was released defective after earlier repair though that assertion is as yet unsupported. If it was then that warrants further delving, including whether repair quality management and testing were sufficient. The investigation of the oil tube production process failures that led to the QF 32 uncontained engine turbine disc disintegration showed just how such things can happen.
Besides, if some of these repair agencies are as unsuitable as his account relates then that needs correction. Yet he lets the comment, “Many of those repair stations in Miami are junk peddlers” go unremarked, even though incongruous, coming from an ex-NTSB man. His article is replete with colourful anecdotes.
He makes no mention of testing of the AoA sensor removed earlier from the aircraft, which may have become defective while installed. If so, the nature of that defect remains of interest.
The import of his article concerns desirable and achievable pilot competence but the same goes for maintainers, many of whom are having to deal with more complex avionic equipment without being able to follow logic paths but instead are reliant on automatic diagnosis and test equipment across a range of skills. Is their training, updating and checking adequate and matched to the occasional need for independent thought and requisite experience? Is an engineering backstop readily accessible?
Regrettably he makes no mention of the purported coverage of MCAS in maintenance documents and the implications of that for diagnosis.
Finally, there was an emergency directive to aircrew about managing a runaway but what was issued to the maintainers, who at Lion obviously had struggled with diagnosis? Though apparently this is irrelevant to the Ethiopian crash from what he says the cause of the AoA measurement failure is unknown nevertheless.
He quotes, “They kept dispatching a faulty aircraft. Eventually they ran into a crew that couldn’t handle it.” Yes. Still it is hard to understand how it came to be that the earlier Lion crew needed to disconnect the stabiliser trim to continue flying and they either made those switches on landing or just left them disconnected, either one, without any warning to the subsequent crew that having the trim on was trouble.
All in all I would have thought that Lion at least should carry a large share of the responsibility for that accident.
@Andrew. He says, “……in my estimation pilots have managed to crash the 320 at about the same rate, largely because of confusion over automation.” If his estimation is right, with similar crash rates between high automation and lower, in the 737, if the training of pilots for the latter costs more, the former will be where the money ends up?
@ALSM. Thanks. Vortex generator. I hope the AAIB skills and application of those are up to it and timely and/or they seek and receive help from Boeing and other airworthiness agencies. Previously they have been intent on identification, mainly.
@Andrew
I’m sure that full investigation report will through further light on LNI610’s crew’s action. There are relatively uncomplicated explanations for some of the crew’s choices. Langewiesche could have presented those explanations in a balanced fashion rather than simply presenting the crew’s actions as unusual, strange and unexplained.
My mistake regarding the term ‘breakout’, I should have said ‘breakaway’. In any event Langewiesche describes ‘using the control column to give opposing elevator’ as an effective technique that for some reason the Lion Air crew did not use. If he’d looked at the FDR data he would have seen that, probably instinctively, every MCAS commanded AND trim is met with an opposite manual elevator input. Langewiesche must know that that technique would have been completely ineffective because MCAS was running. He fails to explain the MCAS introduced exception, instead choosing to add brush strokes to his portrait of the crew as being incompetent. I think it’s shitty, if not biased, journalism.
I note that it took you only 15 words to provide the proper caveat to the notion that there is a ‘perfectly capable parallel system of manual trim’. Langewiesche failed to make any attempt to cover that and it’s not like he was tight on a word count. Again, shitty, if not biased, journalism.
I agree with you wholeheartedly that most (but certainly not all) of the reporting to date has emphasised the role of the aircraft in the two accidents – ‘jet bad’. And I agree that proficiency standards need to get a run but surely it is possible to do that in a balanced fashion, not by jamming the pendulum to the stops in the opposite direction.
Langewiesche was keen to give us a potted history of Indonesian commercial aviation to underscore his ‘pilots bad’ case. Poor outcomes in the developing world can apparently be sheeted home largely to either incompetence or corruption, perhaps both. However, in the developed world of Boeing, apparently problems like MCAS, the Dreamliner battery issue and the litany of KC-46 issues are because people of ‘unquestionable if bland integrity’ have had a bad day. Again, it’s just shitty journalism.
Happily I’m not without some company on the Langewiesche article.
https://twitter.com/Satcom_Guru/status/1174352046054469632?s=20
Lion crash report due in November.
https://kdal610.com/news/articles/2019/sep/18/indonesia-to-publish-final-report-on-lion-air-crash-in-november/938383/?refer-section=world
Mick Gilbert
You say “Happily I’m not without some company on the Langewiesche article.”
No, of course you are not.
The whole sorry sad tale of JT610 and ET302 and Boeing is so sad in so many ways.
Being charitable, one might say that the writer of the NYT article may simply have Tunnel Vision. But that may be descriptive of several aspects of the whole situation.
More technically, the writer brought up something that I have not heard of previously concerning ET302. I only have access to the Preliminary Report No. AI-01/19. Perhaps the writer of the article has more information. I am going to review and then I may ask Andrew and yourself if there is a quandary in one aspect of the article.
@Mick Gilbert said: That article seems to have Boeing’s grubby finger marks all over it.
However you feel about the quality of the journalism, I think Langeweische is an honest broker, and not beholden to Boeing. The question of airmanship versus automation is going to be repeated again and again as autonomous vehicles become more widespread in the coming years. I think that is the broader point he was trying to make to his non-technical audience. After all, his work was not meant to be the results of an aircraft accident investigation.
From the article:
That is not meant as a blanket defense of Boeing. On the corporate level, the company is the worst sort of player — a corrosive agent that spreads money around Washington, pushes exotic weapons on Congress, toys with nuclear annihilation, sells all sorts of lesser instruments of death to oppressive regimes around the world and dangerously distorts American society in the ways that President Dwight D. Eisenhower warned against in his prescient 1961 farewell address.
That’s certainly not a ringing endorsement of Boeing.
Langeweische composed his article for the NYT Magazine, not Flight Global or Aviation Week.
I have read comments from @satcom_guru and @scottiebateman (BA 747 line pilot and ex-RAF piot) voicing criticism of the article.
Lang’s piece provides useful insight, for a general audience, into the fiasco. I’d refer anyone who might be interested to Dominic Gates’ reporting at the Seattle Times for a more comprehensive treatise on the subject.
He hits fundamenatl issues: growth in demand for air transport which requires trained pilots, new aircraft, etc. Airbus released its Global Market Forecast (GMF)this week: 4.3% growth in air traffic with demand for 39,200 aircraft over the next 20yrs; 550,000 pilots in the same period. Training that many pilots and cabin crew, aircraft and avionics engineers, to globally consistent standards will be a challenge.
@Andrew
Re: MAX
There is an over-riding “apparent” contradiction in the MAX story.
The public now thinks they understand the problem with MAX was too much automation and too much technology, so the public thinks we need to let the pilots fly the plane manually. But actually the solution (per your quote by Langeweische) is Boeing needs to get more like Airbus and do more software control of the flying. I tend to agree the latter is correct, but it is a little hard to grasp the concept.
Andrew, Mick,
Concerning the NYT article:
Towards the end of his telling of the tragic flight of ET302, the writer of the article tells of the re-activation of the electric trim, following unsuccessful attempts to manually trim using the trim wheel.
The Preliminary Report No. AI-01/19 presents some preliminary FDR Data in Appendix 1. This clearly shows that two stabs were made at using the manual electric trim at approximately 05:43:11 and 05:43:15 UTC. In the words of the article, the pilot: “gave it only two halfhearted tries”.
I had previously thought that this was indicative of a mindset where usually only small electric trim inputs may be required (?). And this (my) consideration was even in knowledge that about two and one half minutes earlier in the flight the pilot had successfully restored trim to somewhat more normal using an electric trim of duration approximately 10 seconds.
In the article the writer goes on to say the electric trim may have been re-activated: apparently less to use the thumb switch than to activate the autopilot as a way of disabling the MCAS.
He writes: “The record shows four attempts in rapid succession to engage the autopilot, all of which were refused”.
The preliminary FDR data in Appendix 1 of the preliminary report does show one AP Warning at 05:43:30 UTC which would be consistent with at least one attempt to engage the autopilot.
But the article goes on: “Now, in apparent desperation to persuade the autopilot to engage, [the pilot] did the unthinkable and released his pressure on the control column. The column snapped forward, and the airplane responded by violently pitching down, 20 degrees below the horizon. Just then, with the stick shaker still rattling, the MCAS kicked in and achieved full nose-down trim, doubling the angle of the dive.”
I had previously thought that perhaps the pilot had been somewhat surprised by the MCAS activation this time and inertia forces from the pitch-down caused by the MCAS activation had caused him to briefly lose his struggle with the control column.
The article has him deliberately allowing the control column to go forward, followed by the MCAS activation.
Review of the preliminary report FDR Data still makes me inclined to think that the MCAS activation preceded the yoke movement forwards.
Correction:
…. one AP Warning at 05:43:15 UTC ….
RADAR
The RMAF/TUDM radar on Western Hill (on 8th March 2014) was a Selex RAT-31DL. This radar exploits multiple, discrete, pencil beams on the transmit side so as to determine altitude. Information in public domain states that the system exploits 4 pencil beams. Other 3D radars, such as the Martello and the Thomson-CSF 2215 types, rely on beam forming only on the receive side.
Further, it as has been suggested by knowledgeable individuals directly involved in the early days of the radar investigation, that some element of the transmit electronics was unserviceable that night (perhaps a transmit chain amplifier) so it is possible that only three beams were functional, and hence the gap apparent in the ‘Lido Image’.
Concerning the limit of RAT-31DL range, it has been discussed that atmospheric effects such as ducting or refraction may affect the achievable range of detection from the radar antenna. We have some evidence for atmospheric conditions causing anomalous propagation during the night of 7th-8th March 2014. The Terengganu ADS-B data log records transmissions from aircraft during departure/arrivals to Singapore Changi. The recorded aircraft positions are well beyond line of sight from the Terengganu station antenna sites. Research shows that tropical troposphere layer conditions, typical of the Malay peninsula climate, are condusive to this anomalous propagation.
As is typical in the loss of 9M-MRO, the Safety Investigation Team made little or no effort to explore radar data and the military has been obstructive. I, and others here, have collected a wealth of information that renders the claims of state secrets to be a nonsense and informs a catalogue of credible questions to which answers are necessary.
@Don Thompson
Many thanks for the excellent information and insights into the Malaysian RMAF/TUDM radar on Western Hill.
Would you like to hazard a guess at the actual range of the SELEX RAT-31DL radar that night, given the atmospheric conditions, as opposed to the nominal range, which I understand is 270 NM.
I have the location of the Western Hill radar dome at 5.424622°N 100.250972°E.
I estimate the MH370 position was at 6.577706°N 96.340803°E on Flight Route N571 at 18:22:12 UTC.
The horizontal range between Western Hill and MH370 at 18:22:12 UTC would be around 243.7 NM.
@Don Thompson
Thank you for the info. I am still in the dark regarding the maximum displayable range for this radar. Ultimately this would be a limit on performance even if the radar could see forever.
Another journalist rants about the MAX saga in ‘The New Republic‘
Answered my own question on wiki. 270nm.(500km). There is a “maximum detection range of 470km, but I am not sure how to interpret that since it may depend on RCS.
@Richard,
Thanks for correcting the Western Hill PSR position. I appear to have entered 25′ instead of 15′ in the longitude component when writing up my previous. That got carried over to Vincenty calculator.
Ding!!
Richard, and Sid
No, I don’t want to hazard a guess, I see no purpose in a guess. We’ve been positing guesses on this facet of the saga for 5½ years.
I will state that the ‘Beijing Lido’ image depicts something that is consistent with the performance of a RAT-31DL, and consistent with what is known of 9M-MRO from the DCA radar data, and consistent with the GES metadata but the something was merely badly focussed pixels on a screen. Also, the work carried out concerning the FO’s phone registration involved a/c location data provided to the MCMC by PDRM that is consistent, in form, as having been sourced from the RAT-31DL, i.e. the position reports include altitude.
RMAF/TUDM must produce the fundamental data from which the ‘Beijing Lido’ image was rendered, and the radar data provided to MCMC. The absence of that data significantly compromises the integrity and credibility of the Malaysian investigation. The MY Ministry of Defence continues to prevaricate despite many requests for release to the NoK community to support analysis by independent investigators.
@Don Thompson
I understand your concerns as we are dealing with a piece of data (Beijing Lido) that has not been acknowledged by official sources.
However, what I stated above is correct. The maximum unambiguous range that can be displayed by the radar in use is 500km. Even if the plane was illuminated at longer ranges due to ducting, there would be no evidence of it.
Anyway, I prefer the word hypothesis. We have to propose such reasonable scenarios, absent sufficient validated data, in order to potentially gain insight into what happened.
I saw a news report that the CAPTIO team was to make a presentation in Brussels yesterday, but no details have been posted to their site or reported in the news.
@Sid Bennett;
You may be interested in the following pdf paper with details of some ducting research undertaken by Singapore Naval system engineers.
https://tinyurl.com/dsta-gov-sg-radar
It deals in some detail with PRF / PWI and RCS associated with anomalous propagation, e.g. ducting.
@Mick Gilbert
RE: ”In any event Langewiesche describes ‘using the control column to give opposing elevator’ as an effective technique that for some reason the Lion Air crew did not use. If he’d looked at the FDR data he would have seen that, probably instinctively, every MCAS commanded AND trim is met with an opposite manual elevator input. Langewiesche must know that that technique would have been completely ineffective because MCAS was running.”
Langewiesche did not say the Lion Air crew failed to use opposing elevator. He said:
”Such failures are easily countered by the pilot — first by using the control column to give opposing elevator, then by flipping a couple of switches to shut off the electrics before reverting to a perfectly capable parallel system of manual trim. But it seemed that for some reason, the Lion Air crew might not have resorted to the simple solution.”
In other words, the crew failed to follow the complete package of steps required by the Runaway Stabiliser NNC – the ‘simple solution’. The question is: WHY? The crew obviously had no knowledge of MCAS, but that’s somewhat irrelevant. They had an aircraft that, for whatever reason, automatically trimmed in the wrong direction on multiple occasions and yet they apparently failed to make the connection. You could argue there was confusion and the stabiliser movement wasn’t continuous, but to my mind it’s indicative of a crew that failed to think outside the box; a significant airmanship failure.
RE: ”And I agree that proficiency standards need to get a run but surely it is possible to do that in a balanced fashion, not by jamming the pendulum to the stops in the opposite direction.”
I don’t believe Langewiesche was ‘jamming the pendulum to the stops in the other direction’, given that Boeing also copped a pasting in the article. However, Boeing’s failures have already been well documented elsewhere, so there was little point in the author rehashing old news. As others have mentioned, the article was featured in the NYT and was written for a non-technical audience. I think it achieved its purpose by highlighting another systemic problem that is likely to have contributed to the 737 MAX accidents and, if not remedied, is likely to be a significant factor in future accidents. It will be interesting to see if that problem is covered in the accident investigation reports. I have my doubts.
@TBill
RE: The public now thinks they understand the problem with MAX was too much automation and too much technology, so the public thinks we need to let the pilots fly the plane manually. But actually the solution (per your quote by Langeweische) is Boeing needs to get more like Airbus and do more software control of the flying. I tend to agree the latter is correct, but it is a little hard to grasp the concept.”
The problem with the MAX isn’t too much automation or technology; it’s just a poorly designed system. Boeing’s approach to automation has always been ‘pilot-centric’. In other words, the automation is intended to assist the pilot in maintaining control, but ultimately the pilot is always in charge and can override the automation if necessary. However, Boeing’s approach requires that pilots have the necessary skills and experience to make that decision, and sufficient proficiency to maintain control, even when things go wrong. In other words, the pilot is the fallback and is supposed to make the system ‘fail-safe’.
Airbus, on the other hand, takes some of that control away from the pilot and in some situations will override the pilot’s actions. For example, consider the pitch envelope protections. In a Boeing FBW aircraft, the flight control system will try to prevent the pilot from going too slow or too fast by limiting the speed to which the aircraft can be trimmed. However, it does not prevent the aircraft going too slow or too fast if the pilot wilfully chooses to do so for some reason. Airbus FBW aircraft, on the other hand, will override the pilot’s inputs to prevent the aircraft going too slow or too fast (in normal law). The Airbus system design recognises that pilots make mistakes and the system itself becomes the fallback when things go wrong.
Langeweische argues that Boeing’s approach doesn’t work in a world where pilot skills and proficiency are declining and that it needs to start moving towards the Airbus ‘way’. It’s an interesting debate and the outcome isn’t certain. One thing’s for sure though – producing well trained pilots costs money and it costs even more money to keep those pilots proficient at what they do.
@George G
RE: “Review of the preliminary report FDR Data still makes me inclined to think that the MCAS activation preceded the yoke movement forwards.”
I agree. According to the FDR data, the control column didn’t move forward until MCAS activated. The pilot then moved the control column aft in an attempt to arrest the descent. There were no more MCAS inputs, but eventually the control column again moved forward. Presumably the control column forces were too high and the pilot was unable to maintain the back pressure.
@Don Thompson
I find it interesting that the nominal range of the SELEX RAT-31DL radar is 270 NM, but the last radar capture was at around 243.7 NM, which is 26.3 NM short of full range.
I apologise for using the word “guess”. What I really meant was, can the atmospheric conditions or operational status of the radar account for the apparent shortfall in range? I agree we should not try and guess, but I think we can try and understand, what was happening.
You stated “Further, it as has been suggested by knowledgeable individuals directly involved in the early days of the radar investigation, that some element of the transmit electronics was unserviceable that night (perhaps a transmit chain amplifier) so it is possible that only three beams were functional, and hence the gap apparent in the ‘Lido Image’.”
Would the unserviceable element of the transmit electronics, not only cause the gap in the ‘Lido image’, but also cause the reduction in range?
At the time, it was also noted that MH370 disappeared “abruptly” from the radar screen. Is the abrupt disappearance, as opposed to the slow weakening of the returned signal, also a sign of a radar malfunction?
@Richard, BarryC
Concerning range… the detection envelope, in cross section, is unlikely to be a regular rectangle to a vertical wall 270NM out from the antenna x 60,000ft in altitude. As I mentioned above, the transmit ‘pencil beams’ are formed & aimed so as to best fill the desired detection envelope. It is possible that the alleged final detection shows 9M-MRO crossing out of the lower boundary of the lowest elevation tx lobe of the radar.
All that is somewhat moot as targets were detected by the RMAF/TUDM air defence surveillance radar and a ‘final’ plot recorded at 1822UTC. There is data. The analysis of the DCA civil radar showed that the radar processing system at the centre of DCA’s network displayed a track only after it had been reliably established over a number of successive antenna scans, and that the radar head processor extrapolated tracks for a specific number of antenna rotations.
Concerning “abruptly”: it is possible that the Lido image is rendered from the central air defence radar data processing system, the Sentry C2 system. That is, data filtered & processed for display, and not the fundamental track & plot data generated at the radar head processor. It is possible that the radar head processor output is more granular than has been represented in Lido, as was the case in after analysing the DCA radar data. The RAT-31DL is a relatively new system compared with the Martello located at Bukit Puteri, the Sentry C2 integration was achieved in 2012, & data logging should be expected to be SOP.
Concerning RCS: when analysing the DCA primary radar it was noted that the track synthesised from individual target detections, as the aircraft flew away from the WMKC radar head, was noisier than the track as the aircraft approached. References were found that described the hot engine exhaust as a possible cause.
Tomorrow (from my TZ=BST) marks 5½ years since Chief of Air Operations, Lt Gen Ackbal bin Haji Abdul Samad, led a delegation to Beijing where the graphic was presented to the next of kin group, the graphic depicted a series of radar plots extending out over the Str of Malacca.
I’m sure I’m not alone in being weary of this subject, we just want the data, in its most fundamental form.
@Don Thompson
Regarding the civil primary radar around Penang, do we understand why there are some gaps in that raw data?
@airlandseaman: Thank you for the update on the vortex generator. In addition to the probative value of the debris, there are two aspects of this story that I find interesting:
1) The strange coincidence of the murder of the Malaysian consul as he was making arrangements to retrieve the evidence to deliver to Malaysia.
2) In the aftermath of the consul’s murder and the ensuing investigation, the complete disinterest shown by the Malaysian authorities towards shipping the evidence to Malaysia for analysis.
Richard says August 13: “There has been some discussion on how to connect the flight of MH370 between the last radar point at 18:22:12 UTC and the satellite point at 19:41:03 UTC.
At 18:22:12 UTC, MH370 was on flight route N571 around 10 NM beyond waypoint MEKAR flying at 0.85 Mach, at FL390, on a Track of 296.3125°T at a GS of 507.35 knots, when the aircraft suddenly disappears from the Malaysian military radar.”
airlandseaman: “Refresher: , it seems likely (to me) that the altitude remained high up to 18:22. The BTO data between 18:25 and 18:28 suggests some significant speed reduction and/or maneuvering was in play, and the BFO data at 18:40 indicates a descent or turn south at that time.”
There have been many interesting posts on this topic lately, so please allow me to toss out this idea to see what you all think.
If the goal was to disappear the a/c, then the most direct route out of the Malacca Strait that would avoid land would seem most plausible tbqh. That would suggest simply taking a left turn at NILAM on the P627 airway, rather than taking a big excursion toward the Andaman Islands to IGOGU or AGEGA. Plus the shorter route would conserve a lot of fuel allowing a farther flight south.
The problem is that 1st arc crosses P627 only 10 nm from NILAM. This problem could be solved with a “headfake” maneuver starting at 18:22:12–the time of the last radar ping–consisting of a fairly sharp, diving bank to the right/north, followed by a turn back to the left that would line up with P627 and cross NILAM at a course of ~240 at approximately 18:25:27. Ground speed would be about 370 knots–relatively slow, but plausible if the a/c had dived to a lower altitude to avoid radar and air traffic.
Since the pilot was at a fairly high altitude at 18:22, it could not be certain they were not being tracked by radar. Thus turning to the north while diving under the radar would give a last known direction in the opposite of the intended direction.
Note that the radar track peters out at about MEKAR, then there is the final 18:22:12 ping. The headfake maneuver could explain this slight gap: the radar peters out simply because the radar profile of an airplane with its tail pointed at the radar will be relatively small–so the reflections were simply too faint to be detected. But if their was a sharp bank to the right, there would be a brief moment when the entire length of the fuselage and surface area of the wings would be exposed to the radar, thus increasing the cross-section, allowing one final ping before the a/c descended below radar coverage.
Thus, the resulting loop would allow the a/c to cross the Arc #1/P627 intersection right on schedule. And then continuing down P627 at 370 knots, at 18:40 it would just happen to be right at POVUS–the point at which the BFO data indicates either a descent or turn to the south. Since, under the hypothesized scenario, the a/c had already descended, a turn to the south at POVUS would be the most likely explanation.
Now, airlandseaman said above that after the FMT, there would be no need to enter in multiple waypoints. That said, there is an entire string of waypoints that suggest themselves at POVUS, namely, TENOM ISBIX MUTMI ESPOD RUNUT and finally IGPOL (-41.896667°, 85°) a path that crosses the 7th Arc at 39° 20′.
This path runs virtually parallel to the Arc #3 for around 666 nm, so this arc very poorly constrains the position. However, assuming an average ground speed of 490 knots, this would put the aircraft 150 nm south of ISBIX at 19:40–about 2 degrees south of the equator. (The path is 10 to 13 nm west of Arc #3 at this point, depending on whether RUNUT is used as a waypoint or not, but that should be within a couple of sigmas of the error margin.)
Note that the 19:40 position is far to the south of the due south paths being considered here. This considerably relieves fuel constraints, allowing a crossing at 39S or more. However, as a result, due south paths diverging from this path do not work out very well. General path is ~189T.
However, I am not sure what the logic of a South Pole destination is. In the simulated path, the course was more like 167T–not 180. Morever, steps were taken to delete the simulation, but, as everyone knows, deleting something is no guarantee it cannot be recovered. Thus it is interesting that the 189 path is a rough mirror of the simulated path. Intriguingly, in the simulated path, the last waypoint overflown was MUTMI. Perhaps it is the case that MUTMI was also chosen as the last waypoint in the real flight…
I know, I know. Even if you can overcome the fuel constraints for a 7th arc crossing that far south, there the barnacles and the drift simulations.
Regarding the flaperon barnacles that is a total red herring. The J. Poupin 12 August 2015 report was totally sloppy. If you go to the primary literature he cites (Evans 1958), the first sentence is “Information on the rate of growth of all Lepus species is scanty.” Poupin’s extrapolation is based on an anecdote mentioned in a letter based on a couple of buoys; it is totally unwarranted. Moreover Poupin does not cite Magni et al. (2014) “Evaluation of the floating time of a corpse found in a marine environment using the barnacle Lepas anatifera L. (Crustacea: Cirripedia: Pedunculata)” Forensic Science International (WARNING: the pictures of the corpse are gross af and very disturbing.) Anyways, they report “estimated growth rates for large (capitulum
lengths >39 mm) L. anatifera striata ranged from 0.11 to 0.93 mm/day, with mean rates of about 0.39–0.58 mm/day.” So the largest of the flaperon barnacles were probably only 2 months old; if you assume the biggest ones were biggest because they grew faster than average, then they were perhaps quite a bit younger than 2 months.
As for the currents, while I appreciate the tremendous amount of effort that has gone into those simulations, as far as I can tell, most of the simulations are based on drifter buoys that may not be accurate analogs for lightweight composite material, and they do not take into account the storms that took place. For example, there was a major gale that went through the area 1 week after the crash that stopped the aerial search: http://www.hurriyetdailynews.com/storms-ground-mh370-air-search-after-new-debris-sighting-64172 Who knows what effect that storm alone may have had? As for debris not making it to Australia, we cannot be certain that debris did not in fact wash up there. They have a reputation for cleaning up their beaches there, whereas flotsam and jetsam are allowed to build up in Africa. In places where the trash builds up, a guy like Blaine, who knows what to look for, can go into such places have have a high likelihood of finding a debris object. As for the claim that Australians cleaning up beaches would necessarily recognize MH370 debris for what it was, that need not be the case. We know of at least one example–the Rolls Royce object–that was seen on a beach, was distinctive enough that it warranted its picture taken–and then was not recognized as a debris item for over a month. If educated South Africans can overlook MH370 debris items, then so could Australians. Indeed, since most of the items were found by Blaine Gibson, that is a sort of a proof that many, many items have gone unnoticed.
Bottom line: barnacles and drift simulations cannot definitively rule out a far south crossing of the 7th arc. And if it is the case that the FMT could have occurred at POVUS–much further to the south than is ordinarily considered–then a far south crossing cannot be ruled out by fuel constraints either.
@Barry Carlson
At the moment to DSTA site is down for “maintenance.” I will check later.
@Richard, Don Thompson
The need for the original radar data is obvious, but as there has been no movement in years, we must “press on irregardless.”
The radar may be using CFAR (constant false alarm rate) processing, where the detection threshold is set with respect to the noise, in which case, the returns would look to be the same strength until it drops below threshold and “suddenly disappears.”
Warren: Re “…there is an entire string of waypoints that suggest themselves at POVUS…”
Just because waypoints exist on a map ITVO a hypothetical SIO path does not mean waypoints were used. What possible reason would a rogue pilot have for using multiple WPs if headed as far south as possible in the SIO? It makes no sense whatsoever to me as a pilot (going on 52 years now). If there is no land anywhere nearby on the route, why do that? Following WPs would only reduce the distance one could go from the FMT. Why do that? No one has offered a credible reason for doing that.
@airlandseaman: I am not suggesting there would be a reason to enter the entire string of waypoints. What is suggestive imho is in the simulated path, when the “FMT” in the simulation happened, it looks like MUTMI might have been entered as a waypoint; perhaps MUTMI was again entered as the single waypoint in the real flight.
The great circle flight from POVUS to MUTMI and continuing on, just happens to overfly IGPOL, but the latter is a very obscure waypoint that may not even be in a B777 navigation system.
At any rate, if POVUS really was the FMT, your kind of forced into that 189 corridor/path anyway if you assume a straight path at cruising speeds. A single waypoint could have been entered, either, say, ISBIX, MUTMI, RUNUT, IGPOL, SEBRO, 6969S and the final result will be pretty much the same–a straight path that fits the BTO arcs rather well.
My main point here is that the FMT might have happened much further to the south if there was a sort of “headfake” maneuver starting at about 18:22, in which case a 180 course doesn’t fit so well.
I was just hoping that someone like Richard with a more sophisticated modeling system than I have might want to take a look at the idea. Here is a google Earth picture that shows what I think might have happened between 18:22 and 18:40 https://i.imgur.com/JxPKzMv.png
@Don. Small reminder on the KB radar. Noisy trace outgoing from kota bharu was a spreadsheet error in my calcs. Once corrected that noise was largely resolved.
@Don Thompson;
Thanks for digging up the RMAF Western Hill radar specs again!
Regarding the degraded returns as the target flew away, you said,”References were found that described the hot engine exhaust as a possible cause.”
That being the case, then the effect was to disperse the potential reflected energy by random direction refraction.
The reported ‘drop out’ post 18:22:12 of the recorded target could also be that the aircraft passed through the boundary of the atmospheric duct, i.e. the wave-guide. One possible cause of that could be a descent?
My interpretation of the maximum range capability is that the time-base is the determining factor, i.e. the PRF/PWI would be right at its limit at 500km. The reference to 470km relates to the display, where the outer range ring is at 250NM giving an over-scan of 3.77NM.
>BArry Carlson: “The reported ‘drop out’ post 18:22:12 of the recorded target could also be that the aircraft passed through the boundary of the atmospheric duct, i.e. the wave-guide. One possible cause of that could be a descent?”
A turn would increase the radar cross-section better than a descent. And if it is a rapid descent, you would want to combine it with a steep bank anyway so every loose object on the plane doesn’t go flying vomit comet-style.
@Warren Platts;
You said,”A turn would increase the radar cross-section better than a descent.”
The RCS doesn’t come into it if the aircraft has exited the anomalous propagation duct. In the turn case you mention, the likelihood of exiting the wave-guide is not as high as for a descent. The inversion layer causing the duct is more clearly defined in its vertical profile.
A descent doesn’t need to be “rapid”, a drift down by reducing thrust is all that is needed.
@Warren:
Re the drift to Australia — the big year-end cleanups[Dec2014 and Dec2015 organized by Tangaroa Blue specifically targeted MH370 debris. Volunteers were briefed on possibility of finding such. Beyond these organized efforts, the crash was much better known — constantly in the media — in Australia. And debris fields reaching Australia would include materials that sank or disintegrated in the longer drift to Africa. All suggests that the Australian coast got much better coverage than the western Indian Ocean shores…The absence of any possible debris in Australia [aside from the towelette package] should be taken seriously in any map-pinning exercise.
Barry, OK, let’s just say there was an “anomalous propagation duct” (APD); the significance is debatable. The a/c was at the edge of the Western Hill radar range in any case, as evidenced by the apparent bit of a gap in the radar coverage between MEKAR and the last ping at 18:22:12. An APD itself would not explain that gap: inversion layers are pretty level; so the aircraft would have to descend below it or ascend above it, and then go back for a brief time to cause the last ping.
The simpler explanation is the a/c was in the APD, but still had simply gone so far that the tail-view RCS was not enough to send back detectable signals. Thus a slow descent–a drift down by reducing thrust–would cause the a/c to get out of the APD, if it existed, but would not increase the RCS, and thus not explain the final ping.
And again, why would the pilot wish to descend, unless it was to get below radar and other air traffic? If the goal is to disappear from radar screens, then a rapid descent is called for. And to do that best, you do a banking dive. Recall movies of dive bombers. They don’t just push the nose down–that causes negative g’s and blood rushing to the head–no bueno. Instead they do a diving roll that keeps positive g’s on.
I guess you missed my 11:16 am post this morning. But if there was a turn AND a dive, the RCS would briefly increase, causing the 18:22:12 ping, followed by a permanent dropping out of the radar picture.
@lkr:
I agree that lack of finding debris in Australia counts against a 39S crossing, other things being equal. What I disagree with is that the lack of such debris conclusively falsifies such hypotheses. There are all kinds of uncertainties: not least in the simulations themselves. There is a huge uncertainty in the total number of debris items. Depending on the scenario, that could vary by an order of magnitude or two. Indeed, one could argue that the lack of debris in Australia is evidence for a semi-controlled ditching!
As for positively identifying debris once it washes ashore, that too remains problematic. So people were told about MH370 debris: But were they specifically told to look for honeycomb composite? Did they show pictures of the debris found in Madagascar? Obviously not. And as for other items, what would that be like? OK, a sneaker washes up on shore. Who’s to say it came from MH370? Or a degraded foam cushion? Or even a suitcase? Any anyways, how do we know the towlet package did NOT come from MH370?
Bottom line: We must beware of the illusion of technique. Computer simulations depend on all kinds of assumptions that may or may not match reality.
Anyways, the lack-of-debris-in-Australia and barnacle issues have been debated to death for years now. What is perhaps new is the idea that the aircraft might have slipped out on the P627 airway with a possible FMT at POVUS. The question is: Is that scenario definitively ruled out given what data we do have?
@Warren Platts
If you study the 1825-1828 BFO/BTO burst it paints a fairly nice looking 15-nm N571 OFFSET shape in the data, which I believe Victor was the first person to notice, probably 5 years ago now. The new IG idea NILAM to AGEGA is a similar shape turn, not sure if it is equally good fit, or just almost equally good.
So you would have the burden of showing the same quality fit to the 1825 data. Even if you could show a good fit to the 1825 data, many of us are getting less and less supportive of the 38-40 South solution. Couple ways to look at that, but if you really study the BTO/BFO data hard, I think it really suggests more like 30 South but if you hold to passive flight, straight 180 South to 34 South. So even if you are correct about turning south at NILAM onto P627 at 1825-ish, that does not stop me from saying MH370 later turned due south at BEDAX or ISBIX as the FMT.
The 38 South argument is that we *know* the plan must have been to go as far as possible from Autralia to the sunlight line, so we have to make assumptions to fit that. But if you consider expected drift of BFO readings, I feel the 38 South fit to the data probably falls apart.
Tbill: What is a 15 nm offset shape? I have no clue what you mean here.
As for the FMT, isn’t that supposed to happen at 18:40? In which case, if the flight was going down P627, and crossed Arc #1 at 18:27, that leaves only 13 minutes to get to BEDAX, which would require 697 knots. (as for ISBIX, note that in the scenario proposed, ISBIX is overflown, even if it is not an entered waypoint.)
@Warren Platts
The offset along N571 is shown in most solutions using the NILAM_IGOGU path and is consistent with a diversion to a parallel path which is standard for a loss of comm. It is also consistent with a turn to AGEGA for the 180 solution. It is shown on many of the GE screen shots that have been published. Whether it is automatically cancelled at the IGOGU turn is an open question as there seems to be contradictory evidence. Whether it is or not (and Geoff Barry and I studied it in great detail some years ago without reaching a firm conclusion), it does not meaningfully change the 186 path result.
When I originally studied he 186 path using Barry’s model (aqqa), the centroid of the probability occurred (if memory serves) at 186.4 and I rounded it to 186 as good enough. Anyway it does go over ISBIX, whether by chance or design I do not know.
Many of the paths suggested on this blog fail when subject to scrutiny along the entire path due to inconsistencies in needed flight speeds, etc and only a full path analysis can eliminate them.
BTW, I wish that when discussing paths, people could use the true air speed (TAS) since the selection of altitude and Mach velocity for a particular met model leads to a TAS at a particular place and time, and so consistency between different models may be determined.
In defense of the 38-40S solutions: What about the debris field that was supposedly found by aircraft about 2 weeks after the crash? Why is that eliminated as evidence?
I was scrolling through the wind conditions for the few weeks after the crash, and in the vicinity of the 38-40S solutions–and I’m assuming a glide–the prevailing wind conditions were NW, 300-310ish.
https://earth.nullschool.net/#current/wind/surface/level/equirectangular/loc=-80.955,40.053
Yes, there was variation. A high pressure system to the NE was dominating, but there were hurricane-strength cyclones going on to the south near Antarctica that were sucking down some powerful currents. Thus, although there was some variation, the strongest, most sustained winds were coming out of the NW, that would tend to push any debris to the SE.
https://i.imgur.com/FYwvXlc.jpg
Assuming 0.5 knots average drift speed, that works out just about right:
https://i.imgur.com/ZZcYHp7.jpg
@WarrenPlatts
Back in 2016, when MH370 search vessels were covering the southern end of the 7th arc, a few Chinese fishing vessels moved in close, possibly to monitor, or more probably to hamper the search effort.
Did they have something to hide in that area?
https://skytruth.org/2016/01/unusual-vessel-behavior-in-mh370-search/
@CanisMagnusRufus
Proximity of fishing vessels to the search vessels was not uncommon during the 7th arc search.
An explanation is that the vessels were actaully… fishing. There is some evidence that the search towfish activity acted as a FAD for pelagic species such as tuna.
@Warren Platts
Re: Proposed MH370 OFFSET from N571
Perhaps the best visualization of the suggested OFFSET maneuver (that fits the BFO’s) is provided by the Captio team in the following animation:
http://mh370-captio.net/wp-content/uploads/Traffic-8-March-2014-uploadee.mp4
Re: FMT at 1840
Turn south FMT at around 1840 is only one solution (admittedly was the assumption for the first search effort by ASTB/Bayesian Model at 35-38 South). These days we are essentially saying FMT was completed no later than approx. 19:41.
@TBill
The CAPTIO video is really illuminating as it displays the dynamic interaction of the presumed flight path with other commercial traffic. Richard labored long and hard to do the equivalent. Of course, I can’t agree with their flights of fancy after the FMT.
My recollection is that the ATSB report identified the period 18:24 to 18:39 as the period in which a turn to the south occurred. There was no identification of the time of 18:40 as THE time of the turn.
I believe that all of the studies that led to the original IG report were based in discrete path simulations and not on the Bayseian approach that was used by the ATSB. There was some dispute as to the exact time of the turn, but I believe we settled on the turn at IGOGU at 18:40 as highly likely.
Based on reported studies (including mine etc.)the very best results in terms of residual error were obtained with the location of the turn at IGOGU at 18:40 and the azimuth of the final leg of 186 (rounding of numbers intentional).
For purposes of the studies that were done later and which are ongoing, the time of the turn was relaxed to be “not later than 19:41”. In my view this may have been prompted by the difficulty of postulating other paths that might be found after the first search failure.
It seems that a good candidate path has been identified (180) with a turn at a waypoint (AGEGA) at 18:50. There may be others.
None of these studies are formally Bayesian, but do nevertheless take into account what we learn over a period of time.
The official search concepts are dominated by Bayesian thinking, which in the present case seems to have insufficient data to identify a true hot spot. This is not true with the IG and current studies.
Re: Chinese fishing vessels, it is weird that most of them weren’t registered. Not that following international rules is normal for China. They very well could have been there to monitor the sonar operation. It is not unusual for them to use fishing vessels to gather intelligence, apparently.
https://nationalinterest.org/feature/chinas-sea-phantom-fleet-prowls-the-open-waters-15105
@TBill: thanks for video. I guess I’m asking why we should expect an offset maneuver, rather than a “headfake” maneuver: right turn followed by U-turn. There was a red shift in the Doppler that would indicate a right turn and/or descent, but were there subsequent doppler BFOs that would eliminate a turn toward the satellite that soon (that would cause a blue shift)?
@Sid
Obviously a watershed moment in MH370 flight path design was when ASTB/etc announced that the phone call at about 1839 gave us some BFO data. But I was not personally following closely in those days.
@Warren
Head-fake has a lot of merit but how it might have been done is unknown. The AGEGA proposal is a pretty darn good head fake, and potentially consistent with non-public radar hits (for example, Indonesia said something like we heard MH370 was seen in the Andamans). The 15-nm OFFSET proposal is just what fits the data pretty well, as opposed to speculating a flight path and intent. Obviously we have a combination of data and speculation, but the 1825 period is where we have almost enough BTO/BFO data to sort of see the flight path 3-minutes after loss of radar (which is not saying too much, but it helps).
Thanks Bill! And speaking of drift studies, have there been any formal attempts to backtrack the purported debris fields first identified by the aerial search about 2 weeks after the crash?
@Warren Platts;
Remember the flaperon that came ashore in Reunion?
A B777 pre-loved flaperon was obtained and modified to match the 9M-MRO one now held in France. Tests undertaken in Tasmania provided evidence that in moderate conditions, i.e. ~20kts of wind; the flaperon became quite active. This involved flipping over multiple times and effectively “walking on water”.
Conditions south of 38°S would have given the 9M-MRO flaperon a fighting chance of making it to the southern coasts of Australia, including the north and west of Tasmania, then on to the west coast of the North Island of New Zealand. As this wasn’t the case, the assumption is that it got carried along by the anti-clockwise wind/current circulation associated with the Southern Indian Ocean High until Reunion got in the way.
Richard Godfrey has written a number of papers dealing with the floating debris, and one of them is referred to in a blog article by Victor Iannello at:-
https://mh370.radiantphysics.com/2018/07/20/
As a relative check, you could go to:-
http://adrift.org.au/?lat=-40&lng=84.5¢er=-5&startmon=jan&direction=fwd
and compare with:-
http://adrift.org.au/?lat=-34.4&lng=93.7¢er=-5&startmon=jan&direction=fwd
A quick take-away from just those two examples, is that debris from 40°S on the 7th Arc, has < 5% chance of making it to Reunion in 16 months when compared to the 34.4°S example.
Nothing of a variable shape, surface area, volume or density that floats, can be construed as behaving in a single conforming manner when confronted with the physical elements impacting on its behavior. Likewise thousands of plastic ducks will spread out in a random kind of cloud, that at least gives an insight into the probability of where a floating object may have gone.
@Barry
Your comments reflect my thoughts.
We have satellite data that is not able to tell us a terminal location. It is, frankly, indeterminate – under-constrained.
We have drift analytics that are likwise indeterminate. Take your best guess on the duck cloud.
The lack of motive speculation, perhaps an artifcact of the “Duncan Days”, remains a mystery to me. Victor’s path to the Cocos is still my favorite. Go North to 20 degrees South latitude.
The best data we have is the lack of debris found in areas already searched.
For those following the B737MAX saga, the following article was published by The Wall Street Journal and has also appeared on several other news sites, including The Australian:
Indonesia to Fault 737 MAX Design, U.S. Oversight in Lion Air Crash Report
First formal government finding on crash also likely to detail pilot and maintenance missteps; NTSB preparing separate safety recommendations
By Andy Pasztor and Andrew Tangel Sept. 22, 2019 4:54 pm ET
Indonesian investigators have determined that design and oversight lapses played a central role in the fatal crash of a Boeing 737 MAX jet in October, according to people familiar with the matter, in what is expected to be the first formal government finding of fault.
The draft conclusions, these people said, also identify a string of pilot errors and maintenance mistakes as causal factors in the fatal plunge of the Boeing Co. plane into the Java Sea, echoing a preliminary report from Indonesia last year.
Misfires of an automated flight-control feature called MCAS on the MAX fleet led to the nosedive of the Lion Air jet and a similar crash of an Ethiopian Airlines MAX shortly after takeoff from Addis Ababa in March. The two crashes took 346 lives, prompted the grounding of all 737 MAX planes and disrupted the global aviation industry.
Details of the Indonesian report, which haven’t been reported previously, are subject to change and further analysis. Indonesian investigators declined to comment, except to say the final document is likely to come out in early November.
A Boeing spokesman said the plane maker continues to work with Indonesian authorities as they complete the report.
U.S. air-crash investigators are preparing to make public a handful of separate safety recommendations, ranging from bolstering the manual flying skills of pilots to enhancing FAA vetting of new aircraft designs.
The U.S. National Transportation Safety Board is expected around the end of the month to call for improvements to cockpit training and crew decision making, according to industry and government officials.
The goal is to ensure pilot proficiency when automated systems are malfunctioning or turned off, to help ensure appropriate responses to contradictory cockpit warnings such as those that occurred prior to the MAX crashes, the officials said. The board also is expected to emphasize the importance of setting priorities when executing emergency checklists.
In addition, the NTSB is expected to focus on potential changes to the certification of new airliners. The board is poised to recommend re-evaluation of FAA procedures that give the industry authority to sign off on certain safety matters, the officials said. The aim is to make such approvals more transparent, with the goal of greater predictability and more-consistent federal oversight across various types of onboard systems.
Neither the U.S. nor Indonesian recommendations will be binding on the FAA, though the agency already faces escalating congressional and public pressure to change certification procedures. More than half a dozen outside inquiries, including a Justice Department criminal probe and various blue-ribbon advisory panels, are delving into the FAA’s 2017 approval of MCAS. Earlier this month, a Senate appropriations subcommittee backed legislation that would require FAA officials to address recommendations from ongoing investigations and audits.
The FAA has said it welcomes the independent reviews, will carefully consider their results and doesn’t have a firm timetable for allowing MAX jets back in the air. Boeing has said it is collaborating with U.S. and foreign officials to safely return the MAX to service.
Steve Dickson, the FAA’s new head, and top lieutenants are scheduled to meet Monday in Montreal with some four dozen foreign regulators to provide a closed-door update on anticipated fixes to the MAX’s flight-control software and computers.
The FAA is urging a core group of regulators—from Canada, Australia, Brazil and New Zealand—to approve the fixes around November, which would be roughly in tandem with informal U.S. timelines. FAA leaders also are trying to persuade aviation authorities in Europe and other regions to follow by lifting their grounding orders shortly afterward, according to U.S. government and industry officials familiar with the deliberations.
But such coordination efforts are running into significant hurdles. Canadian aviation regulators have signaled to the FAA that they expect to require pilots to undergo simulator training before they can start flying the MAX, something the FAA is unlikely to mandate. It could take until March for Air Canada to phase the bulk of its MAX aircraft into regular schedules, according to a person briefed on the details, months later than projected for U.S. operators.
In Europe, regulators previously said they won’t accept the FAA’s technical verifications of fixes and intend to perform their own certification analyses, possibly adding weeks or months to the timetable.
Meanwhile, FAA officials said in recent weeks that Boeing hasn’t provided all of the requested details laying out the description and safety assessments of the MAX’s redesigned flight-control system.
The latest version of Indonesia’s accident report has been shared with the FAA and NTSB for comment. U.S. officials are expected to visit Indonesia around the end of this month to finalize the document. People familiar with the process said NTSB experts don’t appear to have major disagreements with the draft. Boeing and the FAA, on the other hand, are concerned the final report will unduly emphasize design and FAA certification missteps, some of these people said.
Unlike NTSB reports that identify the primary cause of accidents and then list contributing issues determined to be less significant, Indonesia is following a convention used by many foreign regulators of listing causal factors without ranking them. Instead, the report is expected to list more than 100 elements of the crash chronology, according to a person briefed on the details. Many of those points are likely to refer to missteps by pilots and mechanics initially revealed last year in Indonesia’s preliminary report.
Indonesian authorities now are asking for comments on the draft conclusions dealing with those missteps, as well as findings that investigators have determined constitute engineering shortcomings, including reliance on a sole sensor in the original design of MCAS, according to people familiar with the matter.
https://www.wsj.com/articles/indonesia-to-fault-737-max-design-u-s-oversight-in-lion-air-crash-report-11569185664
@Andrew. Thanks.That covers the ground.
“Boeing and the FAA, on the other hand, are concerned the final report will unduly emphasize design and FAA certification missteps, some of these people said.”
vs
“Indonesia is following a convention used by many foreign regulators of listing causal factors without ranking them.”
These seem contradictory. Reconciliation, if any, will be with the courts and a long time off.
@David
I think we’ll have to wait until the report is published and make up our own minds. Bloomberg is saying the Indonesians are concerned that too much blame is being place on them by the investigators:
“Lion Air and Indonesia’s civil aviation authority are pushing back on conclusions reached by investigators probing last year’s deadly crash of a Boeing Co. 737 Max amid concerns that too much blame is being placed on the Indonesian side, according to people familiar with the matter.”
Boeing Max Crash Report Faces Pushback from Lion Air, Regulator
@Warren Platts
Concerning “any formal attempts to backtrack the purported debris fields first identified by the aerial search about 2 weeks after the crash?”
There were. Initially, under the auspices of AMSA a drift group was convened. However, during the March-April surface search nothing was identified to have originated from 9M-MRO so there was no point from which to make backtrack studies.
Later, Dr David Griffin used an oceanographic model to create simulations of particle drift from discrete locations along the 7th arc. These simulations are published as KML files at his CSIRO blog.
Using this KML data I made an animation, using Google Earth, to show the simulated particle drift from 7th arc at S27º, together with the areas tasked to the search aircraft, and the SLDMB tracks that AMSA kindly provided to me. The animation is hosted here.
@Andrew
the talk of MAX issue being non-fixable seems to be fading.
@David
Replying to your comment of some days back.
It’s my understanding that the dominant, recognisable, feature on the ensonified seafloor would be a cluster of high backscatter objects distributed within an area that is at least 200m x 200m.
You’ll recall a towfish depressor weight that became embedded part way into the seafloor sediment following a towline break, so ity is possible that heavy items may have impacted the seafloor with sufficient energy to be partly buried.
The ProSAS-60, that provided the survey of the present area of interest, is described to ensonify at a relatively low centre frequency of 60kHz and at this frequency it will penetrate the surface of sediment.
I don’t expect that a missed detection occurred because debris was buried, rather that a non-detection was due to terrain shadows or sustained towfish attitude instability.
@Don Thompson. Thank you. I imagine you will address the prospects of non-detection from terrain shadows and towfish instability in your work.
@David
The towfish altitude instability does not affect reflected energy. It only affects imaging resolution/quality. The debris field detection would not be affected by towfish altitude instability.
@DonT: Nice summary of what a debris field should show. It rather deflates my expection that the initial survey missed the most likely kind of debris field.
Do you think that a truly high-velocity impact [producing ‘tinsel’ as BG posted a couple of months ago] could end with debris so dispersed as to give little signal to the towfish in difficult terrain? [That is, a very few larger items like engine core and LG, also missed..] Or would the perfect ditching, though unlikely from recovered debris, be the only scenario that could be missed?
Further — if there was a dive and glide [which I hate], would one expect a fifty percent or so likelihood for a long fallout trail to cross into searched terrain? If so, that might include the kind of debris that would be missed by the towfish and picked up by the autonomous fleet…
@DennisW;
You said,”Victor’s path to the Cocos is still my favorite. Go North to 20 degrees South latitude.”
Before I deal with the above; the lack of speculation as to motive is of course an issue. But for the record, I’m not about to stick my neck on the block trying to speculate on the situation that led to what appears to have been a meticulous execution of a well considered plan. Underlying physical and mental health issues could be behind it, though we will probably never know.
With regard to the 20°S via the Cocos Keeling Is. My concern with that path is that it was piloted, and though the BTO / BFO data can fit it, the likelihood that a 180°T LNAV path at 0.84M appears to fit nicely to a 34.4°S 7th Arc position, is a hard one to overlook. The simplicity of a 90S000E/W LNAV FMC entry is that unless the start Lat/Long is left lying around, the chances of ever finding the ‘end point’ would make excellent bookies’ odds. Undone in this case by the AES ‘phoning home for last time.
@DennisW,
I wrote “attitude”, not “altitude”.
The ProSAS towfish nav data shows that the towfish ‘wriggles’ as it’s winched in and out to maintain optimal altitude off the seafloor.
@Barry
The 34S path is a good fit to the ISAT data, no doubt, but it fails to check a couple of key boxes, IMO.
1> The area was searched unsuccessfully. Unless one speculates a terminal location further from the arc, the probability of finding the wreckage there is less than 10%.
2> The 34S path is not consistent with a motive other than suicide and mass murder. Very hard to buy that. The COCOS path is consistent with a plan to land the aircraft.
@DennisW
As a threshold issue, what is the reason to fly to Cocos and land safely?
If the passengers were not to have been snuffed shortly after the diversion, do you think they stood idly by as the plane flew? Do you think the pilot conned the passengers and crew that they were still flying to Beijing?
Also, if there was active piloting, how incompetent of the pilot to run out of fuel when the flight had an actual destination. Surely the pilot would not have wanted to land with dry tanks.
@Sid:
Pretty much what I’ve been thinking. Can’t imagine managing that flight with 200 desperate people in the cabin. Nor, if passengers were safe, an experienced pilot couldn’t manage a safe landing on, say, Australian land.
@Sid
One could speculate that the approach to the Cocos represented the final opportunity to reach an agreement with Malaysia. In Victor’s model the flight path is automated with an FMC left turn to align with the Cocos runway. When no pilot action occurred the plane continued past the Cocos on a constant magnetic heading finally terminating on the 7th arc at about 22S.
https://mh370.radiantphysics.com/2018/06/08/an-mh370-flight-path-ending-further-north-on-7th-arc/
The passengers could be told that the plane is being diverted to an alternate airport, and to remain calm to ensure their own safety. If I was a passenger in that situation, I would most likely do as I was told as opposed to taking the risk of breaking down the cockpit door.
@Dennis: That’s your opinion, and I respect it. Don’t think that passengers, cabin crew and co pilot would trust for hours over open ocean.
The Seattle Times (originally published at bloomberg.com):
FAA recommends better pilot training in wake of Boeing 737 MAX crashes
Hi all,
I’m working on a visualization project on MH370. Is anyone aware of publicly available radar data between 17:21~17:30, as well as 18:00~18:22? Thanks!
Sid Bennett: “@DennisW, If the passengers were not to have been snuffed shortly after the diversion, do you think they stood idly by as the plane flew? Do you think the pilot conned the passengers and crew that they were still flying to Beijing?”
I for one wouldn’t have a clue, as a passenger, where I am if it’s in the middle of the night, when most people try to sleep anyway. It’s dark outside, cruise altitude, possibly cloud cover below, and the IFE could have been turned off by the pilot. Am I missing something?
Further to my last post, the following is a working paper to be presented at ICAO’s 40th Assembly later this week, as mentioned in the Bloomberg article above. The paper is based almost word-for-word on a position paper published in March 2018 by Flight Safety Foundation (FSF).
ICAO Working Paper:
MULTI-PRONGED APPROACH TO ENHANCING PILOT TRAINING AND COMPETENCY DURING A PERIOD OF ANTICIPATED GROWTH AND COMPLEXITY
FSF Position Paper:
Pilot training and competency
@haxi
Yes. The cabin crew. They would find it odd that the flight deck didn’t need refreshments or a potty break.
Some of them might be curious as to the flight path and following it on their IFE display. They would be curious as to why the IFE was shut down and ask the cabin crew who would ask the flight deck etc.
Regarding drift models in general, correct me if I’m wrong, but aren’t the one’s created so far, are they not based on average conditions? E.g., Richard Godfrey’s model takes the behavior of a couple of hundred drifter buoys, then creates a model for the SIO, and then models the migration of hypothetical debris items.
But actual condition can vary radically from place to place and over time at the same place. What I would like to see is a model based on the historical estimated actual wind & current conditions using databases that exist.
https://earth.nullschool.net/#current/wind/surface/level/equirectangular/loc=-35.597,13.528
The above site has a resolution down to about 1 square mile and every 3 hours. It should in principle be possible to model a particular crash site with say 1,000 debris items. The items could have randomly chosen windage characteristics, and then model each bit using the historical data from 2014/2015.
If this has already been done, I promise I will shut up about this! 😉
@Warren Platts said: If this has already been done, I promise I will shut up about this!
This is exactly what David Griffin of CSIRO has done, including calculations for a variety of types of floating debris. This work has been widely reported.
@haxi
Captio has some good visualiztons:
http://mh370-captio.net/wp-content/uploads/Traffic-8-March-2014-uploadee.mp4
The period 17:21 to 17:30 is the U-turn at IGARI up to the start of the KB civil radar data. All we have there is sketchy military data in the SIR (final report). If correct, it is a very sharp turn suggesting manual turn.
The period 18:00 to 18:22 is the end of civil radar data to MEKAR. All we have there is sketchy military data in the LIDO slide.
You are basically asking for public radar data in those gap areas where we do not have public radar data. But the path and speed can be inferred.
@Sid: “They would be curious as to why the IFE was shut down and ask the cabin crew who would ask the flight deck etc.”
Not to mention the problem of the co-pilot on MH370. Unless he was strangled in his seat, he would know what was going on and would have a lot more time with the fire ax than Andreas L.’s captain did… And if you want to go there, isn’t the depressurization scenario more credible?
@ikr
So, you want to sign up for a mass murder / suicide scenario? Maybe a mechanical failure scenario? Get real.
I don’t see either as remotely plausible. The Cocos is a logical route to extend the option of landing somehwere.
In this case, yes. It’s apparently happened a half-dozen times in recent years, usually with signs of forethought, though little or no political connection. I can only conclude that there are of types of suicidal depression where bystanders and innocent parties have no standing at all. I suppose that there is some mental state where otherwise socialized humans can rationalize the mass-murder/suicide. Do they go to “at least they won’t suffer..” or “we all die” or “it was fate”? Who knows? But we do know this has happened and will happen again.
@ikr
Perhaps.
But postponing a suicide is not consistent with historical events.
Who knows? My unqualifed take on Z is that he was not suicidal nor inclined to kill 200+ people.
At the end of the day he simply did what was decided ahead of time – exercise the or else clause of the negotiation.
@DennisW;
You said, “… exercise the or else clause of the negotiation.”
So when in your scenario did this happen, and how was the decision conveyed?
@TBill,
Thanks for the link!
MH370 – China's 9-11.
In the year 2014, many Chinese businessman bought large amounts of properties in Johor as well as across malaysia. This caused an unusual surge in house prices to the extend of national security. Many muslim malay saw this as a threat to the nation. The enroachment of china battleships around Malaysia added fuel to fire and the muslim malay government of malaysia felt they needed to do something about it.
As a predominantly muslim and malay country that dislikes chinese and non muslim, the answer was obvious. An attack on china. But how? Enter mh370. Mh370 was a flight with 95% china chinese passengers. It was the perfect flight for a terror attack.
If u lived in malaysia long enough u will know that the muslim malay government is very anti chinese. They share similar traits as their indonesian counterparts who massacre their chinese population when things go wrong. Google 1998 Chinese Indonesia massacre if u want to know more.
U can see how uninterested the malaysian authorities are in finding mh370. They rather close the case ASAP. The muslims who lost their lives on the plane has been told to keep quiet and accept it as a form of Jihad. So take note, MH370 is China's 9-11.
@Warren Platts said: “But actual condition can vary radically from place to place and over time at the same place. What I would like to see is a model based on the historical estimated actual wind & current conditions using databases that exist.
https://earth.nullschool.net/#current/wind/surface/level/equirectangular/loc=-35.597,13.528”
For your info, CAPTIO drift study has dumped and used this raw real meteo data between march 2014 til Dec 2015 at its highest resolution for a forward tracking simulation of the Flaperon. After Dec 2015, the Nullschool data coding and encryption schemes changed making the decoding/de-encryption not worth the effort.
report at : http://mh370-captio.net/wp-content/uploads/CAPTIO-Debris-Drift-Analysis-v2b.pdf
Video at: http://mh370-captio.net/wp-content/uploads/2018/06/Drift-mh370-Captio-v2.mp4
:-))
@DennisW
I submit negotiations if any were completed before IGARI.
@Truth is here
I personally would not rule out some larger purpose. The key point for me apparent domestic Malaysian air piracy, for some reason. However, if there was a larger purpose, the message got lost due to botched plan. If we go by consultant George Bibel, the industry sees MH370 as apparent criminal act. Criminal act to me means home-grown Malaysia internal issue. Your proposal is international terrorism which is not currently thought to be the most likely explanation. As long as it is internal Malaysian issue, Malaysia chooses to ignore it and move on.
After 5.5 years, if the captain was part of a conspiracy to divert the plane, that plan has been kept secret in an impressive way, despite some rumors that surface from time to time. As time goes on, I lean more towards explanations in which the captain acted alone, although we really can’t be sure.
@Victor
After 5.5 years, if the captain was part of a conspiracy to divert the plane, that plan has been kept secret in an impressive way,
By Western standards, I would agree with you. I don’t think we can appreciate the politics and culture in Malaysia.
The NTSB issues 7 recommendations to the FAA, related to 737 MAX pilot confusion.
“The NTSB recommendations also ask the FAA to review all aircraft models to ensure that they don’t have similar safety issues lurking in the background, and to urge other nations to conduct similar reviews.”
That might prove troubling, including the application of retrospective requirements.
https://www.brisbanetimes.com.au/business/companies/boeing-underestimated-cockpit-chaos-on-737-max-us-investigators-say-20190927-p52vdf.html?ref=rss&utm_medium=rss&utm_source=rss_feed
Also:
https://www.wral.com/boeing-didnt-adequately-plan-for-pilot-response-to-737-max-system-failures-ntsb-says/18659427/
Again: Boeing makes organisational changes, including setting up a Product and Services Safety organisation whose responsibilities would include, “….investigating cases of undue pressure and anonymous product and service safety concerns raised by employees.”
https://asianaviation.com/boeing-forms-board-committee-on-safety-in-wake-of-deadly-max-crashes/
@David
Complete NTSB report:
Safety Recommendation Report: Assumptions Used in the Safety Assessment Process and the Effects of Multiple Alerts and Indications on Pilot Performance
@Andrew
Andrew says”Complete NTSB report:”
Thank you.
Flight Global:
FAA urges ICAO to address erosion of ‘manual’ piloting skills
ICAO Working Paper:
PILOT TRAINING IMPROVEMENTS TO ADDRESS AUTOMATION DEPENDENCY
To those of you who understand the BFO calculations
No doubt this has already been accounted for, so it sounds like it is probably a silly question. Thanks in advance for your patience…
The frequency compensation is supposed to correct-out the aircraft movement on a “horizontal plane” on a spherical earth with respect to a stationary satellite. The compensation algorithm doesn’t compensate for aircraft movement in a vertical plane.
If the above is essentially correct, then we have uncompensated residuals due to satellite movement in a vertical plane (satellite altitude) and I presume that this has already been taken into account in the BFO “expected value” calculations.
What about the non-spherical earth? The earth’s radius changes from 6335.439kms at the equator to 6399.594 at the poles – a maximum difference of 64.155kms. A path from equator to [say] 35 south should take you through about (a little less than?) one third of this (21.385kms).
If the compensation algorithm is using a spherical earth, should we not have an uncompensated “virtual descent” of about 20 kms over six hours, equivalent, on average, to roughly -200ft per minute. Has that already been included in the BFO calcs? If not, would this not result in a BFO shift, with the “rate of virtual descent” increasing as your proceed south?
@Paul Smithson: At any instant in time, the SDU is provided very accurate information about the latitude and longitude on the WSG84 ellipsoid, as well as the horizontal (North-East) components of the velocity vector. There should be no BFO error introduced by eccentricity of the spheroid.
@victor Thanks for your response. I understand that the SDU is being provided by highly accurate nav data based on WGS84 oblate sphere. But if the frequency compensation algorithm is simplified to spherical earth with stationary satellite then the difference between spherical earth and ellipse introduces a “vertical” error, does it not?
Paul Smithson
Methinks you perhaps should recheck you values for the radius of the earth.
Re : Your last paragraph when discussing a “virtual descent” :
Yes, as one goes South then the radius of the earth with reduce somewhat.
An aircraft heading generally southwards will get slightly closer to the centre of the earth as it goes. The amount will be less than you have roughed out. Perhaps in the order of 60 feet per minute, or very slightly over might be about it ?
@George G
Thank you for catching that goof.
Wiki says equatorial radius = 6378.137, polar radius = 6356.752 so a “virtual descent” compared to spherical earth of 21.3847kms moving from equator to pole. If from equator to 35S is about a third of this, that’s -7kms. Over 6 hours is about -60fpm. Quite right.
@Paul
The Doppler compensation algorithm uses the aircraft velocity vector in the local tangent plane. This vector is computed using the WGS-84 ellipsoid model and would include the velocity component in the aircraft distance from the center of the earth. Constant altitude does not mean constant distance from the center of the earth. In other words the effect you are concerned about is included in the Doppler compensation.
@Dennis W. That’s as maybe – or maybe not? Unless we have seen the frequency compensation code, we don’t know whether it uses a WGS84 earth or a spherical one. As far as I’m aware, the BFO equations were “reverse-engineered” by ALSM and others. Since the frequency compensation doesn’t need to be very precise for functionality, maybe it does use a spherical earth. Who knows (question!)?
@Paul
I don’t think the BFO equations were reverse engineered by anyone. It is fairly straight forward to derive the compensation used from the ISAT statement – local tangent plane (unambiguous IMO). The parameters used by the algorithm are presumably derived by sensors using a WGS 84 ellipsoid.
@Dennis. I hear you but my point is that unless we can verify what was used in the code we don’t know. A spherical earth compensation algorithm would yield very nearly the same results for a flight path that is predominantly east-west.
@Paul
The Inmarsat paper served as a benchmark check. If you got the same BFO values that Inmarsat got for their published path, you were probably doing things correctly. The assumption being that Inmarsat was doing things correctly.
paul smithson,
I can calculate the BFO under either assumption. It makes no difference.
@sk999. No doubt you are right, but can you explain why that’s the case? I’d have thought that the subtle difference in orientation of local tangent plane between the two models means that there should be a difference equivalent to something like -65fpm descent. According to Barry’s model, -65fpm gives you a BFO change of a little over 1hz compared to horizontal flight.
On reflection, thinking about the difference in section between a spherical and ellipsoid earth…
Flying due south on a spherical at the equator would look like a slight “ascent” from the perspective of WGS84 earth, while flying due south at 80S would look like a “descent”. Somewhere along the way, the orientation of the local tangent will be identical for the two models before it goes from virtual ascent to virtual descent. Perhaps its just that this difference is not big enough to be of any practical importance?
https://www.dropbox.com/s/14qmy4urhczp9q0/Sept19Report.docx?dl=0
In recent months I have posted many times discussing the recently proposed paths by Richard, Victor and DrB and have occasionally exchanged some test computations. This has prompted me to revisit the original IG end point in light of the passage of the years and the various failed search efforts to this point and to compare it with the new suggestions.
To better present my views, I have prepared an informal paper that compares two paths, 180T and 186T, using the same satellite data and the aqqa model.
In short, the two paths have essentially the same errors (small) and require very few assumptions. A few other paths having similar orientation have also been briefly studied and do not seem promising. But, I am aware of another initial waypoint path consistent with 186T path and there may be others for the 180T path.
I do not pretend to claim that there are no other paths that ought to be studied and perhaps searched, but I hope that when the various paths are finally compared in their entirety, the methodology of comparison will eliminate those paths that are inconsistent with the known data. But, one thing I believe that we realize is that the currently known data appears insufficient to reach an unique conclusion.
https://www.dropbox.com/s/0zv2zivx0asbp47/Sept19Report.pdf?dl=0
I have been informed that some people are having trouble opening the .dox document. I also see it seems to be bloated.
So, the above link is to a pdf version.
Sorry for the inconvenience.
@Sid
In paragraph 0011 you state:
In a naive approach to back of the envelope thinking, there is still at 10 percent chance that the plane is in the original search area and a 10 percent chance that it would be found outside the search area. So the probabilities are about equal. However, since the plane exists, the probability of finding the plane in the search area is 50 percent and the probability that it is outside the search area (somewhere) is also 50 percent.
I claim there is a ~10% chance the plane is in the area that has been searched, and a ~90% probability that it is in an area the has not been searched. You cannot use Bayesian priors to categorize a post search probability distribution.
@DennisW
Some say logic is not my strong point. But what is certain is that arbitrarily limiting the search area to a short distance from the 7th arc omits to search for a glide, primarily on the basis that the search area is too large. That is not logical at all.
@Sid Bennett said: But what is certain is that arbitrarily limiting the search area to a short distance from the 7th arc omits to search for a glide, primarily on the basis that the search area is too large. That is not logical at all.
The possibility of a glide should not be dismissed, but you omit an important fact which reduces the possibility of a glide: The final BFOs are consistent with an increasingly steep descent. Many times, you have presented the case that we should be preferring solutions which minimize inputs. Using that logic, a steep dive ending in a crash is more probable than the dive-glide-dive scenario.
Your paper also ignores important elements that change the probability distribution between potential paths: available fuel, drift of debris, and surface search results.
@VictorI
I take your criticisms as reasonable.
My comparison of the two paths leads to a conclusion that they are sufficiently equally probable so as to be considered as a pair. Neither requires a glide. The fuel issue is commented on below.
The likelihood of a glide was smaller before the undersea search failed to find the plane in either location. The glide, being a physically possible end of the flight and being contiguous to the main search area should not, however, be omitted from a search strategy. Re-searching the portions of the original search area where the seabed was less than satisfactory for the original search would seem to be the first thing.
The surface search results did not provide any clues. The debris provided confirmation that the plane crashed in the SIO. The several studies of the drift do not agree at all on a single probable area. You may have a favorite, but how do you differentiate them?
As to the fuel, all I have seen stated with regard to the IG path is that it is now considered too long given the slightly higher headwinds on the 186T path. The quick result Richard presented ignored the difference in met models. So far as I know there has been no study of the fuel consumption on a full proposed path. I have clearly stated that my recent study did not consider fuel.
If a fuel consumption study is done, the Mach velocity and FL that I chose are not necessarily the correct values for the met model. (I also give a FL and Mach velocity for the 180T path and it would be appropriate to use those in a comparable study.) The TAS at 18:22 or 19:41 or whatever is what should be used. Also, in DrBs nominal fuel study for the 180T path, I believe that a step climb was used to extend the range.
Richard has not as yet published a full path, so the fuel consumption comparison this a result.
My understanding is that a step climb requires a person in the cockpit, until the commencement of the last step.
Thanks for reading the paper and for your comments.
“Richard has not as yet published a full path, so the fuel consumption comparison [this] –awaits– a result”
@DennisW said: By Western standards, I would agree with you [that if the captain was part of a conspiracy to divert the plane, that plan has been kept secret in an impressive way]. I don’t think we can appreciate the politics and culture in Malaysia.
If we allow the possibility the captain was part of a conspiracy to divert the plane, then I would again present the possibility that there was a descent followed by a jump over the Nicobar Islands, followed by a climb and a crash in the SIO after fuel exhaustion. The jump would be from the bulk cargo door, and access would require that some of the cargo assigned to the aft hold was not loaded. I largely discount this scenario because of the complexity involved compared to the captain acting alone. However, if we accept that a scenario of this complexity could have been kept hidden for 5.5 years, this scenario would explain a lot of things.
Sid said:My understanding is that a step climb requires a person in the cockpit, until the commencement of the last step.
Not necessarily. During a VNAV climb, altitude constraints may be entered at waypoints, and the altitude passing that waypoint would be the minimum of the restricted altitude and the MCP altitude.
I’m not sure what to think of this article claiming that a group is offering a £200,000 reward for information related to the disappearance of MH370.
https://www.express.co.uk/news/world/1183547/mh370-news-malaysia-airlines-flight-370-missing-plane-reward-prize-information-spt
@Victor
Looking for a whistle blower. I don’t think $500,000 is going to do it, but it is the right idea, IMO.
@DennisW: If it’s legitimate. I have my doubts.
@Victor
RE: “During a VNAV climb, altitude constraints may be entered at waypoints, and the altitude passing that waypoint would be the minimum of the restricted altitude and the MCP altitude.”
Just to clarify – you’re referring to altitude constraints entered during the climb phase, ie the climb to the initial cruise altitude? Subsequent steps are advisory and only affect the performance calculations. A step climb during the cruise phase requires specific actions by the pilot: either select a higher altitude on the MCP and press the altitude selector button, or enter a higher altitude on the VNAV page and press the EXEC button with a higher altitude set on the MCP.
@Victor
You stated at:
(https://mh370.radiantphysics.com/2019/06/30/a-comprehensive-survey-of-possible-mh370-paths/#comment-25422)
“During a VNAV climb, altitude constraints may be entered at way-points, and the altitude passing that way-point would be the minimum of the restricted altitude and the MCP altitude.”
I don’t have a sim, so I can’t test this idea myself.
What I am thinking is this:
It has been established (I think) that a 777 can not be programmed to “drift climb” directly.
But let’s assume that Z wanted to create “an approximate drift climb” to maximise fuel range, by using a lot of little incremental steps.
How could Z do that ?
Your comment leads me to think that Z could do it by using custom way-points, with minimum altitudes set at each way-point.
Let’s assume that Z does his calculations on a baseline ground speed of 480 knots.
Heading due south, he flies down a meridian, any meridian (select 95E for example).
At an assumed 480 Knots GS, (he may not know the winds aloft, but that does not matter much) that is 8 degrees of latitude south per hour, or 2 degrees latitude south per 15 minutes.
Assume that he knows, that for the weights and fuel burn involved, he wants to emulate a drift climb of 40 feet per minute.
This gives him a step climb to be programmed of 6oo feet per way-point at 2 degree south increments. Or, he could use 3oo feet per way-point at 1 degree south increments if he was really going for the absolute optimum.
So, for the sake of example, starting at the equator at 95E, at say 19:45 UTC, at FL350, the way-points and their programmed levels, (at ~approximate~ times) would be:
Lat: FL: ~UTC~
2s 356 20:00
4s 362 20:15
6s 368 20:30
8s 374 20:45
12s 370 21:00
14s 376 21:15
16s 382 21:30
18s 388 21:45
20S 394 22:00
22S 400 22:15
24S 406 22:30
26S 412 22:45
28S 418 23:00
30S 420 23:15
32S 426 23:30
34S 432 23:45
36S 438 00:00
38S 444 00:15
40S 450 00:30
Is it possible to do that in the sim you have, and if so, could you test it out ?
He would have known he would be out of fuel by 40s ~00:30UTC~ anyway, so I have not extended beyond 40s.
Also note, that it raises another question.
The 777 is only certified to FL430.
Will the system accept inputs of levels above FL430, ie, 432, 438, 444, and 450 ?
@Andrew
Just saw you remark, so I ask, what if the whole flight south was programmed as a climb, ie, what if the top of climb / start of cruise was set at the end ?
Could you enter all my way-points and altitudes, then select say FL460 on the VNAV page and press the EXEC button with say FL470 set on the MCP for say 45s ?
Would that work ?
@Ventus45
I can’t say I’ve ever tried! In theory I suppose you could enter a CRZ ALT higher than the planned level, but you would need to do that before the aircraft reached the planned level to keep the FMC in the climb phase. For example, let’s say the planned level was FL350, but you entered FL370 as the CRZ ALT and then only climbed to FL350. The FMC would remain in the climb phase and you could subsequently enter altitude constraints at waypoints along the diversion route and set up an automated step climb, along with a higher CRZ ALT, up to the maximum certified altitude (FL431). The FMC will not accept anything higher.
It’s unusual, but I think it would work.
@Andrew asked: Just to clarify – you’re referring to altitude constraints entered during the climb phase, ie the climb to the initial cruise altitude?
Yes. When I referred to a VNAV climb, I meant the FMC was in the climb phase, either from the initial climb, or a second climb phase initiated after some flap was lowered at low altitude. Some of the scenarios now under consideration include a descent to a low altitude before again climbing.
My point was only that although it is usually deemed not possible, it IS possible to do step climbs without pilot input if the FMC were properly programmed.
@Victor
Thanks, got it!
@Ventus45: I see that Andrew has already chimed in and said what you proposed is possible.
My one comment is that to keep the plane on course between waypoints, rather than associating altitude restrictions with custom waypoints that are entered using latitude and longitude coordinates, it would be easier to refer to offsets (in NM) from a waypoint.
@Andrew
@Victor
@Ventus45
OK that’s interesting point…I could never figure out how to make the sim aircraft change altitude automatically, although the FMC takes altitude per waypoint. I was trying to artificially adjust winds by climbing a few feet into a new wind regime.
Re: actual proposed flight paths, I would be more interested if there is a way to automate a descent after say Arc5? Victor did this is his Cocos path proposal by assuming a programmed landing at Cocos that was over-shot. Is there a way to automate a descent at a “random” waypoint? I’d want to go down to FL200 or so to delay hitting Arc6 quite so fast in “curved” path modes (other than LNAV or CTT).
There are so many ways of looking at the problem and each of us is somewhat proficient with one or more of the tools. I have no experience with flight simulators. In anyone who is willing to fly the 186T and 180T paths and provide a report? The coordinates of the start and the other path details are in the screen shots in my report as are the initial TAS. In the case of the 180T path I programmed a 6nmi offset at NILAM that is cancelled at or about IGOGU.
If anyone wants to work this problem off-line to reduce the bandwidth wastage, please ask Victor for my email.
When I recently tried to create a kmz file from an excel spread sheet with GPS Visualizer, I found that Google has restricted access to their tool.
Is there any equivalent method (apart from the manual creation of a zip file) to do this where the selection of icons etc is user friendly?
@Sid
The GPS Visualizer website embeds a tool named gpsbabel to perform the CSV/XLS to KMZ conversions. gpsbabel is a freely available tool.
@Don
Thanks…
@Sid
Thanks for your paper…I took a look. Nice to get your different persepctive.
Flight Sim has some issues that the grid is not the true oval earth and complex wind fields are difficult to be accurately set-up, and also the operator (me) only is a semi-proficient pilot and with flight sim. You would prefer Victor to be on your flight if the pilots got incapacitated for some reason.
Having said that, my assumption is flight sim is probably close enough to roughly check paths, otherwise I would not use it. But I pause manually to change winds etc.
In case you are interested I made a hypothetical paper study on 180T vs. 186T.
https://twitter.com/HDTBill/status/1038104006038618113?s=20
In my paper, 186T fits best to Arc5. But the moment, I feel if we say BFO is aging a little bit during the flight, then 180S could be the better fit. Additionally, I feel like just before or after Arc5 there is a possible maneuver(s).
I also have a 180 South CTH/CMH path proposal, and I feel like we can see the wind pushing the aircraft. Richard’s Bob Dylan title “Blowing in the Wind” is very striking title choice for me, I said almost the same thing, but I feel like the aircraft may actually be moving in the wind due to Heading setting, not True or LNAV setting. SO I am interested to see how the new 180S LNAV path negotiates the wind field as much as I feel like it should.
180S CTH Path:
https://twitter.com/HDTBill/status/1038437134791790593?s=20
@Sid Bennett: What do you expect to learn from the simulator that you can’t learn from Barry’s tool? As @TBill said, the simulator really is not a good tool for doing precise calculations for route reconstructions. On the other hand, it does a very good job of simulating operational and performance details over short periods of time.
@VictorI
@TBill
First, let thank you for outlining the strengths and weaknesses of the flight sim software.
But I also recall that there was some discussion that the waypoint turns are not faithfully performed in such software.
Here are areas where I would like to better understand the possible flight path behavior. I have done manual approximations to these portions of the flight path, but it is tedious in the aqqa model which does not navigate by conventional waypoints (for those who are not familiar with the model, as I use it, it can navigate by true azimuth and time between changes in azimuth—normally at a constant Mach speed and in LNAV, sort of like the INS actually does), so I was interested in better visualization.
1. The offset of somewhere between 6 and 20nm between the plane and N571 from NILAM, with the offset cancelled and the offset not cancelled at a turn to 186T at IGOGU occurring at about 18:40. (What is the relative fuel consumption between these paths and a straight path between NILAM and IGOGU?)
2. The path between NILAM and AGEGA with a turn to 180T at about 18:52 and with a 3000 fpm descent at 18:40 for about 3 minutes, with two alternatives: a) a return to the original altitude prior to 18:52 and b) with the return to a prior altitude after 18:52. (are there differences in fuel consumption?)
If I have not defined the conditions sufficiently above and in my recent paper, let me know.
These would have been flown by a person who was qualified to fly a 777 and not trying to do anything “fancy”.
I realize that this sounds simplistic to those of you who are flight simulator software mavens, but I am trying to make sure that I am visualizing the situations, and hope to get some further insight by discussing the results.
@Sid
DrB would have to comment on how he does fuel calcs, but I do not think flight sim enters in.
The N571 offset case was discussed and calc’ed by DrB in some detail, going back to one of Victor’s earlier articles. Andrew even conducted some commercial flight sim work to clarify how the turns would be made by a real B777 in offset mode. The results are basically one of DrB’s earlier detailed flight paths to approx. 35S or so.
What we found was for turns over 90 deg the MS flight sim does not anticipate the turn correctly and overshoots, whereas the real B777 does a better job. One can “fix” this in flight sim by advancing to the next waypoint, utilizing better manual anticipation of when to start the sharp turn.
That will be an interesting question how Richard et al elect to execute the AGEGA turn, but if it is autopilot waypoints, and without pro flight sim back-up, i have to guess a B777 would make an exact turn going due south exact at AGEGA.
@Andrew
Thanks heaps!
If it “does” work, I think it is almost certain that Z would have known it, being a flight sim geek and generally acknowledged as having experimented extensively.
If he did know, I think it is almost certain that he did make use of it, because, knowing his limited fuel, he would have wanted to milk every last possible air nautical mile out of every last drop of fuel that he had, by any means available.
This then brings into question, the advisability of modelling the post 19:41 segment “only” on the basis of normal fixed level cruise.
We now have to study closely the differences between fixed level cruise and approximate drift climb cruise, on selected routes, to see if there are any significant clues emanating therefrom.
Specifically, since each step climb would occur at a few hundred feet per minute for a minute or two at each of the 2 degree south points (if he did what I proposed above) then for each 15 minute segment, he would be climbing for a minute or two, and level for thirteen or fourteen minutes. This could have some influence on the BFO studies. If one or more of the later pings occurred “during” one or more of these “step ups”, the BFO’s would have to viewed a little differently.
@Ventus: “I think it is almost certain that he did make use of it, because, knowing his limited fuel, he would have wanted to milk every last possible air nautical mile out of every last drop of fuel that he had…”
Why? How would this matter? If letting the plane crash somewhere in the middle of nowhere, do a few extra NMs matter in any way? If headed to one on the sanctuaries discussed here, they would have been accessible with proper flight management, or by adjusting fuel load within captain’s prerogative.
I have updated my MH370 Flight Model to start at 17:50 UTC near Penang.
The flight path follows waypoints VAMPI, MEKAR towards NILAM.
I include a lateral offset of 12 NM from N571, starting just before NILAM at 18:25:03 UTC.
Ar 18:28:15 UTC, MH370 is flying parallel to N571 and commences a descent at around 2,200 fpm.
The descent is still in progress at 18:39:55 UTC, when the SATCOM call starts.
At the end of the descent at an Altitude of 7,215 feet, MH370 heads directly to waypoint BEDAX.
At waypoint BEDAX, a flight path LNAV180 and a climb back to FL390 commences.
I have changed my mind and no longer hold waypoint AGEGA as an option.
The descent schedule is in the following link:
https://www.dropbox.com/s/g84ckd973gwuq8b/Descent%20after%20competion%20of%20Lateral%20Offset%202200%20fpm%20Table.png?dl=0
The flight path is in the following link:
https://www.dropbox.com/s/713prupsqozwxkc/Descent%20after%20completion%20of%20Lateral%20Offset%202200%20fpm.pdf?dl=0
@Richard: Your proposed path is MEKAR-NILAM-IGOGU-BEDAX-SouthPole, with a route offset added at NILAM and removed after the turn from IGOGU to BEDAX, with a descent added to reduce radar visibility and then a climb added for fuel efficiency. That all seems reasonable.
@Victor
There may have also been a Direct to BEDAX at the end of the descent, when passing into Indian airspace.
In this case, the flight path just bypasses waypoint IGOGU.
Ending the Lateral Offset before the call, to pass by waypoint IGOGU, would also work to match the fairly constant BFO for 61 secs during the call.
I prefer your option of a waypoint flight path NILAM-Lateral Offset-IGOGU-BEDAX.
@Victor,
Here is an update of the Flight Path via IGOGU.
In this scenario, the Lateral Offset ends before the call.
There is still an ongoing descent at -1,410 fpm during the call.
https://www.dropbox.com/s/r7l83ebgk8sdqt8/Descent%20after%20completion%20of%20Lateral%20Offset%202200%20fpm%20via%20IGOGU.pdf?dl=0
@TBill
I am not well set up to explore fuel consumption and the various options being proposed, including today’s, have meaningfully different fuel consumptions, I think. I am just trying to understand, qualitatively, the differences between the various paths between NILAM and the time after the FMT where the remainder of the path is considered to have been established.
@Andrew
Wouldn’t it be fun to do a cruise climb like the VC-10s did on the Atlantic route. The original of “Speedbird”.
@Richard
That path proposal is good idea, and interesting to get as low as 7000-ft, which starts to explain Kate Tee’s observation? I do not have total grasp on Tee’s sitings. You could have considered AGEGA to BEDAX or ISBIX? I liked AGEGA to ISBIX.
@Ventus45
The other altitude change option is to set 100 ft/min climb or descent. Victor explored the descent idea in one path concept
@Sid Bennett
RE: ‘Wouldn’t it be fun to do a cruise climb like the VC-10s did on the Atlantic route. The original of “Speedbird”.’
The VC-10 was a magnificent aircraft for its time. Legend has it that a VC-10 holds the unofficial record for the fastest sub-sonic crossing of the Atlantic in 5 hours 1 minute from JFK to Glasgow (Prestwick) in 1979. I doubt there are too many scheduled services between the two nowadays, so I guess that record will never be broken! That said, a B787 flew from JFK to London Gatwick in 5 hours 13 minutes in January 2018.
@TBill
You asked “You could have considered AGEGA to BEDAX or ISBIX?”
A detailed analysis of the BTO and BFO data during the Right Lateral Offset excludes a track to waypoint AGEGA.
The route fitter longitude sensitivity study shows a longitude closest to waypoint BEDAX.
It appears to me that the MH370 flight path was via waypoints VAMPI – MEKAR – NILAM – Right Lateral Offset 12 NM North of N571 – IGOGU – BEDAX then LNAV180 LRC FL390.
@Richard
OK thank you…sounds like the N571 offset idea is still the best apparent fit
@Richard,
Do you use same bias (as R-channel) for BFOs on the C-channel datapoints or a custom bias value(s)?
In the below the co-pilot’s phone on-mode detection approaching Penang is discussed.
Might there be a record of the last previous time that his phone’s on-mode was detected? That might give a clue as to whether his phone was off at take-off. If it was, that detection would indeed suggest an incomplete attempt to use his phone in desperation.
Whether or not there were other call attempts, including from other crew, on-mode detection of their phones would add to the above, as the converse would tend to negate it.
However it might be that such records are no longer available anyway.
https://www.express.co.uk/news/weird/1186072/mh370-news-malaysia-airlines-flight-370-missing-plane-pilot-copilot-fariq-abdul-hamid-spt
@David: In an ideal world, we’d have Malaysian investigators providing all the cell phone activity for every cell phone that was on the plane. That’s unlikely to happen. After a clumsy attempt to collect data to characterize the nature of the registration of the FO’s cell phone on a tower on Penang Island, the Malaysians tried to bury all information related to the cell phone data. The information was even kept from the ATSB. (Can you imagine the surprise and anger that the ATSB investigators must have felt when they learned about the cell phone data?) The probability that we will at this point obtain additional cell phone data is near nil.
Former NTSB Greg Feith and John Goglia apparently have a new podcast Flight Safety Detectives. In this episode they struggle with current NTSB’s recent recommendations to FAA (re: 737MAX).
https://www.flightsafetydetectives.com/e/deconstructing-the-ntsb-737-max-safety-recommendations/
Maybe we can ask them to tackle MH370 one day.
@Paul Smithson
You asked “Do you use same bias (as R-channel) for BFOs on the C-channel data points or a custom bias value(s)?”
I use the L-Band and C-Band frequencies for Channel Unit 6, but the same BFO Offset Bias as for the other channels at 149.83165244 Hz.
@Richard Thanks.
@Victor. Thanks.
There are few international checks and balances in this aircraft accident investigation business yet the travelling public relies on lessons learned world wide.
The everlasting tussle between national interests vs international responsibilities.
@David
from W. Langewiesche’s article…
“An American expert, referring to the international aviation protocol that is supposed to govern accident inquiries, told me, “Annex 13 is tailored for accident investigations in confident democracies, but in countries like Malaysia, with insecure and autocratic bureaucracies, and with airlines that are either government-owned or seen as a matter of national prestige, it always makes for a pretty poor fit.”
@Richard
RE: The descent schedule in your October 1, 2019 post:
There’s something odd with the values in the CAS & TAS columns. The relationship between the Mach and TAS values seems to be correct, but the CAS values are too high.
@Paul Smithson
You are right to point out the issue of the BFO Offset Bias for Channel Unit 6 used for the SATCOM calls at 18:40 UTC and 23:14 UTC.
Unfortunately, there were no SATCOM calls during the flight of MH371 to offer help in calibration of Channel Unit 6.
I calibrated the BFO for Channel 6 using the 29 data points for the second call between 23:14:00.904 UTC and 23:15:02.032 UTC.
The average BFO is 217.275862069 Hz at an average time of 23:14:21.109 UTC.
Assuming a constant flight between 22:41:21.906 UTC and 00:10:59.928 UTC, then the BFO Offset Bias is 148.191807970 Hz for Channel 6.
I calculate the difference to the BFO Offset Bias I am using for the other R-Channels is 1.639844470 Hz.
Many thanks for your help.
@Andrew
Many thanks for checking my descent schedule and pointing out the error in the CAS values.
I have updated my MH370 flight route for the FMT.
A sky vector graph can be found at the following link:
https://www.dropbox.com/s/x4s2c1gmjbfnloh/Descent%20after%20competion%20of%20Lateral%20Offset%202200%20fpm%20and%201400%20fpm%20after%20Lateral%20Offset%20End.pdf?dl=0
A revised descent schedule can be found at the following link:
https://www.dropbox.com/s/thr0ttcwskfktds/Descent%20after%20competion%20of%20Lateral%20Offset%202200%20fpm%20and%201400%20fpm%20after%20Lateral%20Offset%20End.png?dl=0
@TBill. Yes thanks. He did put it well.
I see from his article on the Max crashes that Boeing and Airbus assisted the Chinese to improve flying safety to the point that, “Today the Chinese airlines are some of the safest in the world.”
He comments that a like effort by Boeing in Indonesia suffered from lack of political support.
If IATA/ICAO cannot intervene with accident investigation standards perhaps other accident inspection agencies could offer training and support to those that can be encouraged to welcome it…
But I pontificate, so enough.
@Richard.Thanks – that’s clear.
@Richard, DrB, Victor, sk999 – I noticed that although the phone calls are both C-channel CU-6, the channel name differs: 23:14 channel name is IOR-3737-21000, while the 18:40 is IOR-3730-21000. Is this of any significance? Is it possible/likely that different bias/offsets could be associated with these different channel names?
@TBill. Yes, he put it well.
@Ventus45
@Victor
Re: PSS777 Flight Sim
Following some trial and error, I seem to be able to make PSS777 follow a step schedule of climb by waypoints.
If you enter a lower altitude for a descent at a farther waypoint, the aircraft descends immediately (in other words, I am not able to program a future descent in PSS777 in this manner).
@TBill: Once in descent, the aircraft should not descend below altitude restrictions at waypoints. If there is an immediate descent, I suspect that the FMC believes it is high on the glidepath that is required to satisfy whatever altitude constraint you entered.
Perhaps you can provide more specifics, including the distance to the waypoint with the altitude restriction, and whatever speed and altitude constraints are added to the route.
@Richard
RE: A revised descent schedule can be found at the following link”
I suspect the descent/speed profile in your descent schedule would not be achievable without the use of speed brake during the descent. In the PMDG B777 model, the aircraft speed remains well above the CAS values in your schedule if the rate of descent is kept constant at 2,200 ft/min and then 1,400 ft/min. The rates of descent would need to be quite a bit less to contain the speed without the use of speedbrake.
I assume the profile meets the requirements for the route you proposed, but from a pilot’s perspective the speeds are unusually slow during the latter part of the descent. Why would the pilot reduce to such a slow speed?
@Andrew: At low airspeeds, I suspect the aerodynamic model in the PMDG might underestimate the drag. As a result, idle descents at low airspeeds are more shallow than actual, which causes the IAS to increase more than it should during a V/S descent. I haven’t systematically studied this, but you can observe this trend by setting the speed to 240 KIAS or less and doing a FLCH descent while watching the FPA on the VNAV DES screen. For instance, at 240 KIAS, I observe a descent angle of 2.1°, which corresponds to (L/D) = 27.3. That seems way too high.
I think many of us would love to hear your impressions of the PMDG 777 model.
Microsoft has announced it will be releasing a new version of Flight Simulator in 2020. From the reviews I’ve seen, including some amazing videos, this should be awesome. There is a continuous feed of satellite images from Bing, combined with a powerful rendering engine, which creates amazing views out the windshield, including realistic clouds, weather, and lighting during the day and night. I suspect at some point after the release, PMDG will release a B777 add-on.
@Andrew
Holding out on us re: PMDG777 use. I thought maybe Richard et al were putting flaps down so they could re-enter climb mode to allow step climb schedule.
@Victor
That’s interesting re: FSXX
@Victor
RE: PMDG B777
I haven’t had it up and running long, but so far I am impressed with the graphics and also the systems modelling. I hear your point about the performance modelling – I’ll have to play around some more to get a better feel for the descent profiles. Nevertheless, I’d be surprised if the figures in Richard’s descent profile could be replicated in the aircraft without additional drag. I think the rates of descent would need to be somewhere around 1,500 and 1,000 ft/min.
@TBill
Thanks, I’d be interested to hear if that’s the reason for the slow speed.
https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=2ahUKEwiVqvjVtP7kAhUSeawKHQ1zBUkQFjAAegQIAxAC&url=http%3A%2F%2Fatmseminar.org%2FseminarContent%2Fseminar9%2Fpresentations%2F38-Stell-PresentationPDF-6-6-11.pdf&usg=AOvVaw3Pg60eNQPFnswbD_KSlQQ8
re:descent profiles
This seems to be an interesting technical paper.
Do a Google Scholar Search for “nikoleris coppenbarger” for a much more detailed paper on the subject.
@Andrew
You stated “I suspect the descent/speed profile in your descent schedule would not be achievable without the use of speed brake during the descent.”
I agree, I am using speed brakes.
In my latest test, I am using full speed brakes to achieve a 5,500 fpm descent.
At the end of the descent phase, I am using Holding Speed.
This allows me to arrive near waypoint BEDAX on time.
Near BEDAX, I start the climb back to FL390.
This allows me to arrive at the 2nd Arc at 19:41:03 UTC on time to fit the rest of the flight route based on the LNAV180 LRC FL390, that Bobby, Victor and I have proposed.
https://www.dropbox.com/s/mqs5pnw30aezc7n/Descent%20after%20competion%20of%20Lateral%20Offset%205500%20fpm%20Sky%20Vector.png?dl=0
B737 Max – position available
https://www.dropbox.com/s/z7aiylq2kjvkr7g/Photo%20source%20-%20Southwest%20Airlines%20-%20via%20SimpleFlying.com.jpg?dl=0
@Richard
The descent is presumably motivated solely by the desire to cross under the nearby N routes which, in the furthest southernmost case, has a minimum FL of 160.
The climb could begin there.
How much time delay are you introducing in the NILAM-IGOGU-BEDAX + (approximately to ISBIX) path?
I am not certain I have asked the question clearly, but what I am getting at is that your connecting path would appear to need a time delay with respect to a path at a constant FL.
The second paper I mentioned previously gives some insights into the strategy that might be pursued by a B777 pilot.
This would be the likely strategy of the pilot since the objective of the pilot is a standard descent to at least FL140 so as to clear traffic. The resultant delay is merely an unintended consequence of the maneuver.
@Sid Bennett
There are 3 aspects to the motivation behind the choice of a FMT flight path:
(1) As you mention, to cross under the flight routes running parallel to the south of N571.
(2) To avoid radar detection by the Indonesian military radar at Lhokseumawe and the Thai military radar at Phuket (The Indonesian military radar at Sabang and the Indian military radar at Port Blair were not operational and I assume that the pilot was aware of the status of both).
(3) Not to adversely affect the fuel consumption to cause a significant change to the ultimate goal of ending up as far south as possible in the Southern Indian Ocean.
By using a holding speed for the low level part of the flight route at around FL50 from the FMT after the descent to waypoint BEDAX, there is no need for an additional delay to match the route fitting from 19:41:03 UTC onwards.
The following link shows the flight path in Sky Vector followed in this scenario:
https://www.dropbox.com/s/mqs5pnw30aezc7n/Descent%20after%20competion%20of%20Lateral%20Offset%205500%20fpm%20Sky%20Vector.png?dl=0
The following link shows the radar ranges assuming an aircraft altitude of 8,000 feet:
https://www.dropbox.com/s/zxqgw4mnww6l0j9/MH370%20Fast%20Descent%20with%20Speedbrakes%20from%20182815%20UTC.png?dl=0
The following link shows the descent schedule followed in this scenario:
https://www.dropbox.com/s/5lyfbs9xaxc4ix7/Descent%20after%20competion%20of%20Lateral%20Offset%205500%20fpm%20Table.png?dl=0
The start speed on N571 is 0.85 Mach at FL395. The right lateral offset of 15 NM starts at waypoint NILAM. The initial descent is rapid with full speed brakes at 5,500 fpm to 8,084 feet in 5 mins 45 secs. The FMT occurs at around 18:35 UTC with the execution of a Direct To BEDAX. During the call at 18:40 UTC, there is still a smaller descent at 500 fpm down to Holding Speed at FL50. BEDAX is reached at around 19:18:30 UTC and the climb back to FL390 starts at 19:22 UTC and is completed by 19:41 UTC.
The fuel consumption during the descent at idle thrust is around 690 kg/hr/eng, during the level flight at holding speed at FL50 is around 3,005 kg/hr/eng and during the climb is around 6,980 kg/he/eng. At the top of the climb to FL390, the speed schedule LRC is selected with a nominal fuel consumption starting at 3,110 kg/hr/eng down to 2,704 kg/hr/eng at the end of flight. REFE occurs at 00:09:55 UTC and MEFE at 00:17:30 UTC. The right engine consumes 1.5% more fuel when compared to the left engine. The overall Fuel Flow Factor is -0.2153%. In order to achieve a PDA of 1.5%, the Air Packs must have been switched off for around 62 minutes after diversion. The aircraft weight at 17:50 UTC near Penang was 213,023 kg with 38,654 kg fuel remaining. The aircraft weight at 00:17:30 UTC was 174,369 kg. The overall difference in fuel consumption to a continuous flight at FL390 in LRC from 17:50 UTC is very small at around 14 kg. The fuel savings at idle thrust and holding speed, by and large compensate for the fuel consumed to climb back to FL390.
CORRECTION:
The last 2 sentences should read:
“The overall difference in fuel consumption to a flight starting at FL395 in LRC from 17:50 UTC and descending to FL390 at 19:41 UTC is small at around 111 kg. The fuel savings at idle thrust and holding speed, by and large compensate for the fuel consumed to climb to FL390.”
@Richard
You say:
“By using a holding speed for the low level part of the flight route at around FL50 from the FMT after the descent to waypoint BEDAX, there is no need for an additional delay to match the route fitting from 19:41:03 UTC onwards. ”
You have tried and done a lot to try to “join the dots”.
But, your method for determination of the likely path from some time after the FMT to the end of flight remains the “crunch” in whether or not there would be justification for a new search at or about the estimated end of flight location.
So, although being able to provide a reasonable pre-FMT flight path may be “the icing on the cake”, it is your method and certainty of determination of the post-FMT flight path which will be the final “crunch”. The use of a crutch such as a reasonable pre-FMT flight path to explain how the aircraft got to the start of the likely path from the FMT to the end of flight may seem “nice”. This nicety is only the icing on the cake.
Your analysis of the evidence of the satellite call records and systematic reduction of the possible likely post-FMT flight paths down to a workable number is the aim of your methodology and comprehensive survey. So far you have presented that to your satisfaction this is the number one.
SO:
Question 1: How deterministic in the final analysis is the fuel analysis upon the final result. Or, paraphrased, how much additional clarity does analysis of the fuel consumption provide in determination of the likely post-FMT flight path and the likely end-of-flight. Or, putting it yet another way, how sensitive upon the fuel analysis is the systematic reduction of solutions to a workable number.
Question 2: Estimated or assumed ambient climatic or weather conditions would seriously affect your analyses (Yours and DrB’s and Victor’s). How deterministic are these estimations or assumptions in the final analysis. Will your final presentation show sensitivity to these assumptions. How sensitive upon these assumptions is the systematic reduction of solutions to a workable number.
Below is a link to the MH370 flight path from 17:50 UTC to the End Point:
https://www.dropbox.com/s/mscaoumksj2ajos/MH370%20Flight%20Model%20V19.8%20Flight%20Path%20Sky%20Vector.pdf?dl=0
@George G
You asked 2 very good questions.
(1) “How deterministic in the final analysis is the fuel analysis upon the final result. Or, paraphrased, how much additional clarity does analysis of the fuel consumption provide in determination of the likely post-FMT flight path and the likely end-of-flight. Or, putting it yet another way, how sensitive upon the fuel analysis is the systematic reduction of solutions to a workable number.”
The fuel analysis is an important element in determining the best fit flight path. The fuel endurance until MEFE at 00:17:30 UTC is a significant input to determining the likely speed schedule. The LRC speed schedule is clearly the best fit. A sensitivity study has been performed on the various speed schedules vs flight level. Again the LRC speed schedule is the best fit. Finally an analysis of the fuel consumption with the Air Packs always switched on or always switched off after diversion or only switched off for a defined time after diversion. The best fit fuel analysis is with the Air Packs switched off for ca. 60 minutes after diversion.
(2) “Question 2: Estimated or assumed ambient climatic or weather conditions would seriously affect your analyses (Yours and DrB’s and Victor’s). How deterministic are these estimations or assumptions in the final analysis. Will your final presentation show sensitivity to these assumptions. How sensitive upon these assumptions is the systematic reduction of solutions to a workable number.”
The route fitter is based on the best fit to the satellite data, speed schedule, navigation mode, weather data, etc. Sensitivity studies have been performed on Start Latitude, Start Longitude, Initial Bearing, Flight Level, Speed Schedule and Navigation Mode. An analysis of the accuracy of the GDAS data has been performed against known data from MH371 and the model tracks the effect of weather data with the GSE evaluation. We know the error limits of the GDAS weather data and the bet fit flight path is well within these limits.
Finally we look at the best fit path from the satellite data, weather data, fuel analysis, drift analysis (David Griffin) and aerial search non-detection of floating debris data. When all these elements align, then the LNAV180 LRC FL390 flight path to 34.4°S is confirmed.
@Richard
Re: Radar Circles
The proposed low altitude FL50 to BEDAX is interesting option. Basically you are establishing a proposed rule that MH370 might have tried to avoid radar detection by the Indonesian military radar at Lhokseumawe. I am thinking a few other flight path investigators (eg; Captio) also applied this rule. In Captio’s case they were higher altitude so they went a bit further out. It would be interesting to show more altitude circles for Lhokseumawe since that is suggested as a possible key flight objective.
I tried to correlate with Kate Tee’s observations, which is fuzzy but I think it could be MH370 see saw. She is saying 1920 around NOPEK, and it is hard for most MH370 flight paths to be as far north as NOPEK and still meet Arc2 at 1941, so we probably have to envision Kate Tee’s exact times and locations were a bit fuzzy.
@TBill
I will post the radar ranges at higher altitude.
Kate Tee has changed her story frequently, so I suggest that her eye witness account is not a reliable basis for proving a FMT route.
“There are 3 aspects to the motivation behind the choice of a FMT flight path:
(3) Not to adversely affect the fuel consumption to cause a significant change to the ultimate goal of ending up as far south as possible in the Southern Indian Ocean.”
There seems to be a contradiction here. If the goal is ending up as far south as possible in the SIO, then why the excursion all the way up into Indian airspace to IGOGU? It is a detour of at least an extra hundred nautical miles. Why not take a more direct path, perhaps down the P627 flyway that leads to BEDAX or perhaps splitting the difference between the Andamans and north tip of Sumatra?
Yes, I know we want a right turn/descent after dropping off the radar screen, but a direct path out to BEDAX could still be accommodated either a loop or U-turn.
I am a bit time constrained so I will only make some brief observations (from memory).
The maximum possible technical range of the radar is 400 km, no matter what the altitude or RCS. I believe IGOGU-BEDAX exceeds that distance.
The lowest assignable FL in the crossing routes is something like FL280 for the first three and FL160 for the most southerly. I can see no reason for a descent below FL140 even if the descent were to have been made to avoid the unlikely collision. Since the people on the plane were dead, what’s a few more. Just fly at a non standard altitude. The altitude spacing should be sufficiently accurate for planes of the type that fly those routes.
Since there is no emergency, a descent should be made in accordance with the MAS standard operating procedures. I doubt that this makes extensive use of speed brakes or a non-emergency descent of 5,000fpm.
Why is the BEDAX-ISBIX segment omitted? It gives essentially the same final azimuth.
@GeorgeG
It is necessary to postulate a plausible pre-FMT and pre-ISBIX locale route if the later flight segments are to be validated. My computational experience is that the start time and azimuth (and location) for the later segment are much more significantly constrained when a condition of plausibility is imposed on the earlier path.
And now for a new question: LRC. What percentage of the MAS long range flights use LRC? Was the captain familiar with those routes? How much fuel is saved by using LRC vs an optimum selection of a constant Mach speed route. (Both using whatever step climb is needed to achieve the aim of fuel economy.)
The reasons for the new search are: The work over the past few years has confirmed that there are valid paths (180, 186)to the 7th arc and due to the terrain and previous technological limitations, there is an acknowledged finite probability of having missed the wreckage and in the initial search definition, there was the presumption that there was no one at the controls at the time of fuel exhaustion. The consensus now is that there is a possibility of a person being at the controls. So, an entire area in the vicinity of the 7th arc was not searched.
The previous definition of the search area was based on a Bayesian model, which led to the need to search all along a portion of the 7th arc, and it would apparently have been exorbitant to extend the search transverse to the arc. If there are two hot spots and each is searched to a glide radius, this is a significantly different search area than was previously searched.
@Sid Bennett said: Since there is no emergency, a descent should be made in accordance with the MAS standard operating procedures. I doubt that this makes extensive use of speed brakes or a non-emergency descent of 5,000fpm.
Several times I’ve heard the use of speed brakes in the context of an emergency. Yes, if the intent is to descend to a lower altitude as fast as possible, a FLCH descent at Vmo = 330 KIAS with full speed brakes fits the bill. However, if MH370 is traveling to the northwest, and the pilot’s intention is to descend to a particular altitude (let’s say 10,000 ft) and then turn to the southeast and then to the south, a rapid descent with full speed brakes makes the most sense because it minimizes the distance traveled to the north. There is nothing unsafe about using speed brakes. It is not energy efficient, but neither is traveling in the wrong direction.
@Victor
Is there not sufficient time before the FMT to descend at a more measured pace? Yes, 5000fpm is doable, but would unlikely to be done with passengers. Are there any other reasons for the pilot to select such a high rate of descent?
And, since one of the presumptions is that the pilot was looking for the longest distance flight, why do a maneuver that wastes fuel.
Victor wrote: “There is nothing unsafe about using speed brakes. It is not energy efficient, but neither is traveling in the wrong direction.”
Right! If we can bring speed brakes into the picture, what is the real evidence for a 100 nm excursion to the NW?
@WarrentPlatts
Is your question directed to the turn at IGOGU?
@Warren Platts
Is your question directed to the turn at IGOGU?
@Sid Bennett: Yes, 5000fpm is doable, but would unlikely to be done with passengers.
I don’t think the pilot was concerned with passenger comfort at that point.
Are there any other reasons for the pilot to select such a high rate of descent? And, since one of the presumptions is that the pilot was looking for the longest distance flight, why do a maneuver that wastes fuel.
As I said previously, speed brakes are not energy efficient, but flying in the wrong direction (northwest instead of southwest and then south) would waste even more fuel. The assumption is the turn away from northwest did not begin until attaining a particular altitude, so the turn could occur sooner using speed brakes.
I don’t know whether or not speed brakes were used, but depending on the objective, that option could make sense. I’ll leave it on the table as a possibility, regardless of whether it is SOP.
Richard,
Acknowledge your reply. Thank you
Sid Bennett (aka Sid BEnnett)
I was hoping postulation would not have to come into it.
But, so be it.
Sid, you say, the beginning of the later segment of the flight is “much more significantly constrained when a condition of plausibility is imposed on the earlier path”. Even so this comes back to making some assumptions, or postulations if you wish, regardless.
Richard has said: “The fuel analysis is an important element in determining the best fit flight path.”.
I was previously thinking that fuel usage and expiration was a useful tool in elimination of outlier solutions. An extreme example of such would be that the aircraft just could not have reached the South Pole with the amount of fuel on board, just to make the point. However Richard’s declaration is more definitive than that.
Richard has said “The fuel endurance until MEFE at 00:17:30 UTC is a significant input to determining the likely speed schedule.”
So, it has become appropriate to make an estimate of just how the fuel had been used prior to the “later segment of the flight” in order to make sense of the subsequent fuel usage during that later segment. In other words the “systematic reduction of solutions to a workable number” – my terminology for the purpose of not losing sight of the aim of the analysis – requires some dependence upon the likely fuel used prior to (say) reaching Arc 2.
Sensitivity to the estimate of the amount of fuel used prior to Arc 2 may be a significant criterion upon which someone may or may not decide that a potential new search is justifiable.
The following is a ‘rambling’ approach concerning how much sharpening of the pencil may be required. If this sounds too basic for this discussion please be advised it is so I may “get my head around” the degree of sophistication required. Here I will use the outer bound approach.
The starting point is when the last ACARS report was received at 1707:29 UTC on 7 March 2014. The reported total fuel load at this time was 43,800 kg.
The end point is at 19:41 UTC at ARC 2.
The duration of this period is thus 2 hours and 12 minutes.
One bound might be to consider the aircraft to have flown for this period continually at (say) 39500 feet pressure altitude (FL 395) at minimum control speed.
The other bound might be to consider the aircraft to have flown for this period at (say) FL275 at VMO.
Thus two outer bounds for the fuel remaining at the time of the aircraft being at ARC 2 are calculable based on B777 performance data and specific data for 9M-MRO (MH370).
Continual sharpening of the pencil over the last few years utilising radar data, as it became available, and or believable, and utilising weather data will, or has, provided evidence to restrict the estimated flight profile for the aircraft for more than the first hour of the period between the last ACARS report and ARC 2. Richard and others have been going to extraordinary lengths to extract as much data and common sense from what is known and what may be postulated concerning the remainder of the period in order to match the consequent fuel remaining at the time of ARC 2 with that which would be consumed by likely subsequent paths southward.
That’s it. Perhaps I have put the problem into perspective. ?
Thus,
Sensitivity to the estimate of the amount of fuel used prior to Arc 2 is a significant criterion.
_____________________________________________________________________
Richard,
You say: We know the error limits of the GDAS weather data and the best fit flight path is well within these limits.
Good.
@WarrentPlatts
Is your question directed to the turn at IGOGU?
Yes. What is the real evidence that MH370 went anywhere near IGOGU?
@TBill
You stated “It would be interesting to show more altitude circles for Lhokseumawe.”
Below is a link to my proposed flight path with a rapid descent after the lateral offset followed by a flight path with a Direct To BEDAX at Holding Speed at FL50 overlaid on the radar ranges of Lhokseumawe (Indonesian Military Radar), Phuket (Thai Military Radar) and Western Hill (Malaysian Military Radar) for an aircraft at 8,000 feet, 10.000 feet and 12,000 feet.
https://www.dropbox.com/s/ntjjc02e2e8tb6t/MH370%20Fast%20Descent%20with%20Speedbrakes%20from%20182815%20UTC.pdf?dl=0
@warren Platts
Your question is too vague to answer. But, here is an answer consistent with your question.
If you agree with the “known” position of the plane at 18:22 and that the Inmarsat evidence is that the plane ended up somewhere along the 7th arc in the SIO south of 33S, then the plane went “somewhere” near IGOGU.
If the above is the only thing that we can agree, then were are no further along than the summer of 2014.
That is not to say that IGOGU is necessarily a waypoint of the actual flight. But there seems to be a tendency to believe that the early portion of the “dark” flight (after 18:22) was flown by waypoints and IGOGU, AGEGA, BEDAX (and one or two others) might be such a waypoint.
If you have a specific proposal regarding this portion of the flight, I would like to hear of it, and the evidence that supports it.
Here is one test of the Inmarsat data: Omit any one ping time. If a proposed path needed an adjustment in azimuth, speed or ROC at that time to define the path and unsupported by any other evidence, it should be rejected.
In the case of the 186 path, the turn at IGOGU at 18:40 is consistent with the entirety of the data. Looking back on the early history of that conclusion, I believe that the turn time was deduced from an extension of the path at 18:22 and a back projection of the path after the FMT.
We further studied the 186 path (see my recent paper for a recap) and computed the most likely turn time for a path along N571. It coincided with the telephone call. (I have always tried to ignore this coincidence and the BFO at 18:40 was not considered in the error analysis of that study.)
Now that Richard et al. have identified another path 180 that seems good after the FMT, the focus of our discussions has shifted to determining if a plausible pre-FMT path exists for this scenario.
@Richard
Nice…looks like Cambell Bay VOBX is around FL200 and about 230-nm so getting out of range.
“If you agree with the “known” position of the plane at 18:22 and that the Inmarsat evidence is that the plane ended up somewhere along the 7th arc in the SIO south of 33S, then the plane went “somewhere” near IGOGU.”
@Sid: Thank you for your answer; I agree with your premises but I still don’t understand why that entails an excursion somewhere near IGOGU. It simply doesn’t make sense if the ultimate goal is “ending up as far south as possible in the Southern Indian Ocean.” Why add an extra distance of 80 or 100 nm that is not necessary and increases one’s chances of getting intercepted by any scrambled fighter jets?
Thus my specific proposal for this phase of the flight is simply this: where Richard shows the right turn around NILAM leading to an offset, I propose instead a quarter roll to the right followed by a diving “split-S” (https://en.wikipedia.org/wiki/Split_S ) maneuver that would involve dropping at perhaps 6,000 fpm to get below 8,000 feet lined up with the P627 airway.
The first arc is thus crossed at P627. The 18:40 phone call would then coincide with a FMT off of P627 at about POVUS, with a course of about 189. The crossing of the 2nd arc would then be at about 2 degrees south.
There is then a rather nice, indeed I would say elegant, fitting with the rest of the arcs from then on out. Only problem is the 7th arc crossing is a bit south of -39S (perhaps with a final waypoint of IGPOL: -41.896667°, 85). That crossing is supposedly ruled out by fuel considerations–but all the fuel models I have seen posted assume the excursion to the north!
Basically, I am asking why the P627 route is ruled out by what little data we have. I don’t see it.
P627 route: https://i.imgur.com/JxPKzMv.png
@Warren Platts
I took a quick look at your proposal. I have not looked at the Inmarsat data in the near vicinity of NILAM.
I first did the entire route NILAM+POVUS+ 189T at a constant M and had some trouble until I adjusted the turn time to 18:35 in a crude compensation for the additional delay due to the turn and a descent.
So I ran a case where the start was at 18:40 at POVUS and 189T (which overflys our very favorite waypoint, ISBIX) and the results were very satisfactory. TAS=488.5kt at 18:40.
So, the issues cone down to fuel consumption and radar avoidance.
@Warren Platts
‘… where Richard shows the right turn around NILAM leading to an offset, I propose instead a quarter roll to the right followed by a diving “split-S” …’
Warren, a split-S requires that the aircraft be rolled inverted and then pulled through the descent to rapidly reverse direction. It is an aerobatic, typically high-g manoeuvre. Doubtless Andrew has a view on the practicalities of such a manoeuvre in a B777.
@Warren
There is no need for a split-S, or any aerobatics. If the intent is to safely generate a very high ROD, from initial FL350 M0.84 cruise, (presumably so as to “abruptly” drop off radar), then normal procedures will suffice.
Whilst maintaining FL350, (and noting that both the Maximum Landing Gear Operating Speeds (VLO/MLO) and the Maximum Extended Speed (VLE/MLE) are 270KIAS/0.82 Mach), then I would simply proceed as follows:
1> Power Levers to Flight Idle
2> Speed Brake Lever to Full
Wait for deceleration to VLO/MMO 270IAS/M0.82, (or lower), and then, and only then:
3> Landing Gear Lever to Down.
Wait for gear to deploy and forward nose gear doors to close (the reduction in buffeting noise will tell you).
4> Landing Gear Lever to Off.
During this time the speed will have decreased to well below M0.80.
Then, pitch down, to attain and maintain the desired ROD, whilst not exceeding MLE/M0.82.
Note that on approaching the M-to-V crossover altitude, you will have to reduce ROD somewhat, to avoid exceeding VLE/270KIAS.
@Ventus45
That is interesting manuever because it seems possibly consistent with the spirit of a rogue flight (especially since they say MH370 did drop off radar rapidly) but whatever is suggested has to be matched up with all the BTO/BFO data at 1825-1828, which is a big job.
@Ventus45
In the simulator, the gear down emergency descent profile at MLE/VLE achieves more or less the same descent gradient as the gear up profile at MMO/VMO.
PS. There’s no landing gear lever OFF position in the B777; it’s either UP or DOWN!
@Andrew: Now that you are using MSFS, when you refer to the simulator, you’ll have to tell us which one.
@Andrew
“…the gear down emergency descent profile at MLE/VLE achieves more or less the same descent gradient as the gear up profile at MMO/VMO.”
That is surprising !
I would have thought that the additional gear drag would have reduced the L/D, and thus the descent gradient, considerably.
Can you provide some details of both profiles please ?
left out a word:
I would have thought that the additional gear drag would have reduced the L/D, and thus steepened the descent gradient, considerably.
@TBill
As I understand it, standard procedure when executing an emergency descent, is to turn off an airway, to minimise the risk of collision with any aircraft that may be on the same airway (either same direction or opposite direction) below.
In effect, what we have been assuming may have been a deliberate lateral offset may not have been, as such. It may have been a standard turn off airway for the rapid descent, followed by a return to course at lower level, parallel to the airway.
The effect flight path wise is almost the same, but the reasoning for it is different.
@Victor
I meant the Level D simulator.
@Ventus45
The gear down profile normally requires the aircraft to first slow down and then descend at a reduced speed compared to the gear up profile. There is a considerable drag rise at MMO/VMO in the gear up profile that makes up for the increased drag of the gear in the gear down profile at the slower speed. The net result is that there is little difference in the time or distance required to descend to the lower altitude.
Thanks guys for taking a look at this. My understanding of the time period around 18:22 to 18:25 is that the BFO indicated a turning away from the satellite that could be explained by either a turn to the right, a dive, or both.
As for the “split-S”, if you read the Wikipedia article, I imagine it would be more like WW2 Spitfire version that involved a quarter roll in an attempt to maintain positive g’s while not flying completely upside down (also, versus the Me-109 variant that was just push nose down causing negative g’s). I drew it sort of like a right followed by a U-turn, but a full corkscrew maneuver also seems possible imho.
Of course, the biggest problem with this hypothesis is simply that if the goal is to turn left down P627 then why do a turn to the right first? Richard’s proposal the turn to the right was an offset maneuver to get out of the way of other air traffic is reasonable, but then that involves the 80+ nm detour to the NW.
My admittedly ad hoc explanation would be that (a) the pilot, suspecting that the aircraft was still getting painted by the Western Hill radar during the initial descent, then a turn to the right would represent a “head fake”–the last radar echos would show a path opposite of the actual one; (b) there could have been a desire to visually look behind in order to see if there were any fighters shadowing the aircraft–a dogfighting corkscrew maneuver would allow one to look behind and force any tailing aircraft to show themselves; and (c) a hijacker high on adrenaline who fancied himself to be a rockstar pilot might want to try an extreme aerobatic maneuver that one would never be allowed to do in ordinary circumstances simply for the fun of it.
Regarding the possibility of “aerobatic” maneuvers, let us recall that weird radar signal that occurred about 16 nm NWW of Pulau Perak at about 18:04 that showed an apparent 6 nm “weave” to the right. That could simply be a big fat error in the radar bearing, but what if it is real? To do it would require banks on the order of 70 degrees–way over the overbank protection. But my understanding is a pilot can override the overbank protection manually.
Thus, if the aircraft engaged in “hotdogging” behavior at 18:04, then it is perhaps less surprising that a radical maneuver at 18:20-18:22 could happen.
Sid wrote “So I ran a case where the start was at 18:40 at POVUS and 189T (which overflys our very favorite waypoint, ISBIX) and the results were very satisfactory. TAS=488.5kt at 18:40.”
It is interesting that on that 189T course from POVUS it is like there a designed airway that goes POVUS TENOM ISBIX MUTMI (an apparent waypoint crossed in the deleted simulation to the SIO) RUNUT IGPOL that doesn’t lead anywhere except to a cluster of research stations in Antarctica.
@Warren Platts
The manoeuvres you described are extremely unlikely in an airliner. In airline ops, an angle of bank greater than 30° is considered extreme and the B777 angle of bank protection kicks in at about 35° AOB.
If the intent was to descend as steeply as possible, the emergency descent profile would get the aircraft from FL390 down to 10,000 ft in about 5 minutes, covering about 40 nm in the process. All pilots should be proficient at conducting an emergency descent; it is regularly practiced during simulator training. The same could not be said of the manoeuvres you described.
@Andrew: yes the overbank protection kicks in at 35 degrees, but the pilot of a B777 can override the protection just by forcing the wheel over. I heard this from a B777 test pilot at airliners.net. Therefore, it is quite possible that the Pulau Perak anomaly represents a real maneuver, and is not an error in the radar bearing.
In any case, I am not suggesting the 9M-MRO was completely flipped over for a “split-S” maneuver; merely that a sharp right turn combined with an emergency descent and reversal of direction on the P627 airway could be consistent with the BFO data, and allow a much earlier exit out of the Malacca Strait area.
Warren Platts said: Therefore, it is quite possible that the Pulau Perak anomaly represents a real maneuver, and is not an error in the radar bearing.
What anomaly? I am not aware of an error in the “radar bearing”. In fact, the Lido Hotel data is consistent with passing Penang Island and then engaging LNAV mode to intercept a leg towards waypoint VAMPI.
https://mh370.radiantphysics.com/2019/01/12/mh370-flight-around-penang/
@Andrew, @Ventus45: In the PMDG777 sim model, with full speed brakes, the gear down descent at 265 KIAS is steeper than the gear up descent at 325 KIAS (7.9° versus 6.1°). (In the PMDG model, the A/P maintains a 5-knot safety margin to overspeed.) However, the descent (vertical) speeds are higher for gear up descent at 325 KIAS. So, if this model is correct, the recommended emergency descent procedure would take less time, but take slightly more distance. If there was depressurization event, it would seem that time is more critical.
@Victor
I believe the SIR report says MH370 was about FL50 at Pulau Perak, which of course seems questionable. I am a little hung up on it myself because I thought there was siting fron Pulua Perak island. But so far that seems to bad memory on my part…cannot confirm.
Interesting comment above on repressurization timing. I am thinking repressurizatiion by Penang, but I could be wrong. If A/P was on at Penang, then also (possibly) aircraft is also being pressured up. I am thinking goal could be to make sure evidence of intentional depressuring does not show up on the flight data recorder, so I am cutting DFDR either from cockpit or CB in the MEC Bay.
@VictorI
I reread your thorough analysis of the civilian radar data which was most helpful.
If the purpose of the route chosen was to convince the civilian operators that there was a plane in communications difficulties trying to land, are there any positive steps that the plane would have taken so that this situation is recognized?
Assuming the the civilian radar operators noticed the flight operating without a transponder, and it then turned away from the airport and over the sea, what would (should) they have done. What would the pilot presume that they might have done?
This goes to the question of what efforts the pilot would go to later on so as to continue to be un-interceptable. Even the turn to N571 is a change of track for a chase plane. Even if the initial change in track at about NILAM were to have been recognized, the initial change in track for all of the waypoint cases is only maintained for about 20 minutes, and the later track is quite different in all of the cases. So, why would the pilot care? The ocean space is vast.
I think all of this goes to the question of whether there was any need for further misleading maneuvers after Penang.
On another topic, in the past day there has been another comment that the plane disappeared from the radar screen abruptly (and I assume that the range was still within the technical range limit of the radar (without any limitation due to atmospheric refraction effects)). I would ask those familiar with the details of these radars as to whether the radar used CFAR (constant false alarm rate) processing. If so, the apparent strength of the echo would be slowly varying with respect to the actual strength, and the echo would suddenly disappear when the echo strength dropped below the detection threshold.
Victor wrote: What anomaly? I am not aware of an error in the “radar bearing”. In fact, the Lido Hotel data is consistent with passing Penang Island and then engaging LNAV mode to intercept a leg towards waypoint VAMPI.
Yes, I am thinking of the Lido Hotel data. Agree that it shows an aircraft headed for VAMPI. But there is that one ping at about 5.8579 98.7304 (about 16.25 nm from Pulau Perak bearing 309); I can’t make out the time stamp, but it’s the 3rd to the last ping before the big radar gap.
That ping is offset from the straight line path to VAMPI by about 6 nm. I call that an anomaly because it is either an anomalous radar ping, or it represents an anomalous maneuver. I calculated the required bank angle to swerve out to that point and then get back on track to be on the order of 70 degrees.
Now, what are we to make of that radar ping? Yes, a turn would require overriding the overbank protection, but I’ve since learned that a 70 degree bank in a B777 is possible: the pilot simply has to manually force the wheel over.
So what do you guys think? Is that ping an error in the radar bearing? If not, the plane was in fact maneuvering like a fighter jet.
Said Bennet said: I think all of this goes to the question of whether there was any need for further misleading maneuvers after Penang.
After passing Penang, the path could have been chosen to deceive searchers into believing the flight continued to the northwest while the intended destination was the SIO.
@Warren Platts: The location and timing of the errant target is not consistent with MH370. Either it is noise or another aircraft.
Victor Iannello says:
October 10, 2019 at 3:07 pm
Said Bennet said: I think all of this goes to the question of whether there was any need for further misleading maneuvers after Penang.
After passing Penang, the path could have been chosen to deceive searchers into believing the flight continued to the northwest while the intended destination was the SIO.
Or it could have been a continuation of the same behavior on the transit across the Malay peninsula: to straddle the boundaries of national flight control ministries. By flying up N571, it is the exact same tactic that was employed in the crossing of the Malay peninsula.
Victor Iannello says:
October 10, 2019 at 3:38 pm
@Warren Platts: The location and timing of the errant target is not consistent with MH370. Either it is noise or another aircraft.
Victor, your statement is a mere assertion. We want to know WHY exactly it is the case that the “errant target” is inconsistent with MH370? If the argument is simply that the turns would require banks of over 35 degrees, that arguement does not hold, because the B777 is fully capable of banks well past 35 degrees. As for another aircraft, that should be easy to solve because it presumably would be broadcasting its position on the ACARS system.
If it’s noise, how many sigmas are we talking about? There’s variation between the pings, and then there’s that one ping. Just by eyeballing it, it looks statistically significant to me…
@Warren Platts
RE: ”…the pilot of a B777 can override the protection just by forcing the wheel over.”
Yes, the bank angle protection can be overridden and it can even be disabled. The point I was trying to make is that the manoeuvre you suggested would be considered ‘extreme’ in a large wide-bodied airliner. Not impossible, but very, very unlikely, especially when there are other well-practiced techniques available to descend quickly in a relatively short distance.
@Victor
Thanks for the PMDG simulator gear up/gear down emergency descent profiles. Unfortunately I don’t have details for the Level D simulator, but I do recall the profiles being very similar in terms of overall timing and distance. Many years ago, the gear down technique was considered ‘standard’ in some Boeing types (eg B707, early B747), but that was changed because it added extra complexity at a time when the aircraft needed to start descending as soon as possible, and there was little benefit to descending with the gear down. The gear up technique is now standard; however, the gear down technique is still available if the speed must be limited due to structural failure. Frankly, I’d be disinclined to put the gear out at high speed with a potential structural failure – the noise and vibration at anything over 200 KIAS is horrendous!
@Andrew
@Victor
Thank you both for your responses. Much to “chew on”.
I now think that the gear up versus gear down rapid descent scenarios warrant even further detailed research and analysis than I previously thought, because it seems to me, that the choice of descent technique to be employed, in any given instance, really depends on what the desired prioity to be acheived is, at the time.
The question now becomes, what was Z’s priority ?
What did “HE” want to acheive ?
I think we have to assume, that by this stage of the game, passenger “safety an/or comfort” was no longer a consideration, since they (most probably) were already deceased. In this case, I think we have to assume that “HIS” priority was of an “operational” nature, and that appears to have been to “abruptly” drop off radar..
This “abruptly” droped off radar was raised by the RMAF Chief at a press conference very early on.
Why did he emphasise “abruptly” ?
The possible significance of the “abruptly” seems to have been pretty much “lost in the noise” ever since.
Andrew makes the point that the fundamental operational difference between the two techniques, is right at the beginning.
The gear up decent is essentially – immediate pitch down – and – accelerate to MMO.
The gear down descent requires – initially maintain level – and – SLOW DOWN (to VLO/MLO).
So, the question now is, how does the difference between the two look on radar ?
The radar head is rotating at ten rpm, so there are six seconds between radar hits.
The aircraft has been cruising directly away from Western Hill at say 480Kn (GS), which equates to 4/3 Nm outbound per 6 second hit.
The LIDO radar record presumably shows that the aircraft was at a steady speed, with even range spacing of the hits.
But, what we now need to know, is what actually happened (exactly) right at the end, say the last half dozen hits.
With the gear up descent, the last few radar hits are when the aircraft is accelerating – so the distance between the last few hits would be “stretching” a bit.
With the gear down descent, the last few radar hits are when the aircraft is deccelerating – so the distance between the last few hits would be “compressing” a bit.
We now have to apply a microscope to the left edge of the Lido Slide.
@Warren Platts said: Victor, your statement is a mere assertion. We want to know WHY exactly it is the case that the “errant target” is inconsistent with MH370?
I looked at this target in a previous post, where I reported that the target was “about 7.5 NM off of MH370’s path, and also about 2.3 minutes later than the surrounding points.” To me, that’s a very solid case that the errant target is inconsistent with MH370. I don’t know how any reasonable person can come to a different conclusion.
@ Andrew
You said it as I was thinking it and reading your following comment “Frankly, I’d be disinclined to put the gear out at high speed with a potential structural failure –”
You had written “however, the gear down technique is still available if the speed must be limited due to structural failure”, and I was thinking that would really be the last thing to do, and then you said it in the next sentence.
(of course it may later be necessary to increase structural loading at hopefully reduced speed by lowering the gear if there was then some intent to utilise it for it’s intended purpose)
[Just a moment in a lighter mood]
@George G
It’s an interesting point for discussion during training. The Boeing FCTM states “…when structural integrity is in doubt and airspeed must be limited, extension of the landing gear may provide a more satisfactory rate of descent.” Increased stress on the airframe is probably the last thing anyone needs if the structural integrity is in doubt!
Another discussion point is the speed to be flown during the emergency descent. The ‘standard’ procedure during training uses MMO/VMO, but the checklist states “Limit airspeed and avoid high manoeuvring loads” if the structural integrity is in doubt. In the absence of a door warning, the pilot is unlikely to know if there has been a structural failure, so it’s probably safer to assume there has been a failure and to limit the speed (and other airframe stresses) accordingly.
@Ventus45
@Victor
For interest, the following image was taken from DP Davies’ classic book ‘Handling the Big Jets’ and shows profiles for gear up vs gear down emergency descents. Davies doesn’t state if the profiles relate to any particular aircraft, but the book was first published in 1967 and updated in 1971, so the profiles are perhaps typical of the B707 and B747. In those aircraft, the MLO/VLO was M0.82/270 KIAS (the same as the B777), but the MLE/VLE was M0.82/320 KIAS. The high VLE probably explains why the gear down descent gradient is much steeper than the gear up gradient. I suspect the gear down gradient for the B777 would be less steep, given that aircraft’s VLE of 270 KIAS.
Emergency Descent Profiles
@Andrew
Thank you Andrew, that image explains the situation quite well. It is interesting to note in that plot though, that if speed was held at M0.82 in both cases down to M-to-V crossover (FL240 ?), then there was no net time difference to reach that level, since the plots cross at about 80 seconds.
That is a descent of 11,000 feet in 80 seconds gear up and 11,000 feet in 60 seconds gear down. I presume therefore that the top half of the descent would be the same for the B777 as these presumably B707/B747 plots. The bottom half below FL240 is interesting. There is a perceptible inflection point in both plots at the crossover, so I presume that is where both have to pull back a bit to keep the speed under control. Assuming VLE is 320 KIAS in both plots, the gear up red plot doesn’t have to pull to reduce ROD much, but the blue gear down plot certainly does, but he is still 30 seconds quicker to FL150. As you say, the B777 VLE limit is 50 knots less, so he would have to pull a bit sooner and harder to prevent over speed, so I can see that he probably would gain nothing in the bottom half, so, nothing overall.
The only real interest for the abrupt radar drop out is the initial high gear down ROD (blue plot 30 to 45 seconds)
@Ventus45
I wouldn’t try to interpret the plots too closely. Assuming the gear up profile was flown at MMO/VMO (M0.90/370* KIAS), the Mach/IAS crossover would occur at about 28,000 ft. The crossover in the gear down profile at MLE/VLE (M0.82/320 KIAS) would occur slightly higher, at 28,800 ft. The pilot would need to reduce the rate of descent passing the respective crossover point in both cases.
In the B777-200 case, the descents would be flown at M0.87/330 KIAS gear up, and M0.82/270 KIAS gear down. The crossover points would be higher, at about 30,500 ft gear up and 36,500 ft gear up. In the gear down case, a descent from FL350 would be at 270 KIAS all the way down.
*B747 VMO=365 KIAS
@Ventus45
I wouldn’t try to interpret those profiles too closely – they could well be generic and not based on a particular aircraft type. The rate of descent should reduce below the Mach/IAS crossover, but for descent speeds of M0.90/370 KIAS (gear up) or M0.82/320 KIAS (gear down) the crossover points should occur at about FL269 and FL288 respectively.
In the B777-200 case, the crossover point for the gear down descent (M0.82/270 KIAS) would occur at FL365, so the entire descent from FL350 would be flown at 270 KIAS.
@Andrew, @Ventus45: It would seem that unless there was an emergency calling for extreme measures, a B777 pilot would never lower the gear at cruise altitudes and speeds, even if below Mle/Vle, due to the risk of gear damage. If there was an intention to land, the eventual use of the gear would be required. If there was no intention to land, there is still the risk of the gear getting jammed in the down position, which would greatly limit the range. The marginal gain in descent angle (and the reduction in vertical speed due to the lower air speed) would not justify it.
Re: Landing Gear or flaps down
I would be looking for any strategic reasons. For example, flaps down then up, followed by ascent is apparently a trigger to re-enter climb mode which then allows step climb per a waypoint schedule. I recall wondering if landing gear went down, but I forget what I thought that could enable (CVR reset etc).
Then of course we also have the usual suspect reasons: fall off radar, repressure aircraft, redirection tactic.
TBill
You noted “I believe the SIR report says MH370 was about FL50 at Pulau Perak, which of course seems questionable. I am a little hung up on it myself because I thought there was siting fron Pulua Perak island. But so far that seems to bad memory on my part…cannot confirm.”
It seemed to me that the transit over Pulau Perak was deliberate. Given that it is garrisoned and certainly would have someone on watch duty, it looked like a ‘sighting’ was what was desired by the pilot, presumably as a component of a misdirection strategy
I did start thinking along the lines of a descent with landing lights on and/or wheels lowered to increase the visibility of the aircraft to an observer on the ground.
This is certainly possible as I remember spotting a plane from a ludicrous distance which turned out to be a U2 coming into land with landing lights on. The main light must have aligned perfectly with my line-of-sight.
Later on the ‘low pass’ over Pulau Perak became somewhat discounted and the consensus today seems to be that it did not actually occur. However there still could have been a sighting without an actual descent.
@flatpack
You stated “Later on the ‘low pass’ over Pulau Perak became somewhat discounted and the consensus today seems to be that it did not actually occur.”
I agree with you.
The Malaysian SIR states “The Military radar data provided more extensive details of what was termed as “Air Turn Back”. It became very apparent, however, that the recorded altitude and speed change “blip” to “blip” were well beyond the capability of the aircraft. It was highlighted to the Team that the altitude and speed extracted from the data are subjected to inherent error. The only useful information obtained from the Military radar was the latitude and longitude position of the aircraft as this data is reasonably accurate.”
The Malaysian statement, that altitude should be discounted, includes the Pulau Perak sighting at 4,800 feet.
International regulator report slams Boeing, FAA over 737 MAX design and approval
https://www.seattletimes.com/business/boeing-aerospace/international-regulator-report-slams-boeing-faa-over-737-max-design-and-approval/
@Richard
Thnak you for that.
fyi I was *not* personally suggesting an FL50 low altitude witness siting at Pulua Perak…rather if there was an eyewitness (which maybe there is not one), but if so I was actually recalling (perhaos incorrectly) the eyewitness saw it at a high altitude.
Victor wrote: I looked at this target in a previous post, where I reported that the target was “about 7.5 NM off of MH370’s path, and also about 2.3 minutes later than the surrounding points.”
Sorry, I did not know that the errant point was 2.3 minutes later than the apparent MH370 points. And your article was absolutely fascinating: that there very well could have been–indeed probably was–a fighter jet tailing the aircraft.
I can see why Malaysia might want to keep that a secret. On the other hand, what could a fighter pilot really do as long as the B777 is not apparently aiming for a skyscraper? You can’t shoot it down, and all of a sudden Hashamudin’s comments make more sense when he says USA might shoot down an aircraft in that situation.
As for the apparent “abrupt descent” and apparent manuevering around during the 18:22 to 18:28–not to mention the reboot–these all might have been because of the fighter jet encounter, either as an attempt to ditch the fighter, or to get it to back off by apparently threatening to crash the plane, or even to appear to comply with an order to land the aircraft at the nearest airport, or perhaps an order to offset and get out of the main flyway…
One might imagine a sort of slow-motion, low altitude O.J. Simpson-style chase then ensued until the F-18 would have to return to Butterworth (and it would have be Butterworth if they wanted to keep it secret) due to fuel considerations.
That could easily explain the feint up toward the Andamans. I would be really curious what an F-18 simulation would show. I see wikipedia says an F-18 has a range of 1,089 nm, but if it using afterburners to catch up, that is going to be a lot less. Distance from Butterworth to IGOGU is 377 nm–THAT VERY WELL COULD HAVE BEEN THE PLACE THE FIGHTER HAD TO TURN BACK!
That also explains the early reports that went into the Andaman Sea–the Malaysians knew it went up there!
Thanks again Victor. Absolutely fascinating…
@Tbill: but if so I was actually recalling (perhaos incorrectly) the eyewitness saw it at a high altitude.
A fighter jet on afterburners would be easy to see; an airliner with its navigation lights off at high altitude, not so much…
Well, the Wikipedia lists the combat radius on an interdiction mission for the F-18 Superhornet at 390 nm. That’s about right…
https://en.wikipedia.org/wiki/Boeing_F/A-18E/F_Super_Hornet
@Warren Platts: I’m glad you enjoyed the post, but since writing it, I’ve been persuaded that the lack of rapid response capabilities at Butterworth would have greatly lowered the possibility of a pursuit.
@Barry Carlson
The full JATR report:
Joint Authorities Technical Review – Boeing 737 MAX Flight Control System
@Andrew
Thank you for posting that JTAR report; easily one of the better review documents I’ve read. Findings ranging from the prosaically administrative through to the downright alarming (with probably a few too many of the latter).
Victor says: “I’m glad you enjoyed the post, but since writing it, I’ve been persuaded that the lack of rapid response capabilities at Butterworth would have greatly lowered the possibility of a pursuit.”
Let’s think about this a little more. In the post-9-11 world, governments have to be aware of the danger posed by hijacked aircraft smashing into skyscrapers. And the Petronas Twin Towers would make a tempting target for would-be terrorists. (Indeed, it is a big mystery why the hijacker simply didn’t take down the Petronas Towers if you ask me.) So we can presume that Malaysia had at least contingency plans for such an event. Also, the F/A-18D actually is specialized for night missions, so it is perhaps plausible that Butterworth would have had QRA duties at night at least.
What is the very latest time the F-18 could take off? Lets say an F-18 had an average speed of 1000 knots (about maximum) and had to cover about 100 nm to get to the 18:07 anomalous point. That would be 6 minutes of maximum afterburners. Thus the very latest an F-18 could get airborne would be 18:01.
A launch time about 18:01 would also make sense because in order to know to vector the interceptor towards VAMPI, the 9M-MRO would have to be headed in that direction, and indeed it was by that point in time.
If they somehow got an alert as soon as the plane was hijacked, that would give 40 minutes. Not likely, but that’s the extreme.
If the Malaysian air traffic controllers could somehow sound the alarm as soon as they found out (I think that was about 17:41), that would give 20 minutes.
On the other hand, there is the military radar showing the approach to Kota Bharu. If the military radar operators and their computer helpers were doing their job, a non-transmitting, big target making a beeline towards you at high speeds would have raised red flags.
So the military operators would probably have been aware of the situation BEFORE the civilian air traffic controllers! Moreover, there would be no need to make a connection to MH370 to raise the alarm. Thus splitting the difference, the crews at Butterworth could have reasonably had up to 30 minutes, maybe more if the radar crews were really good.
As for no one noticing sonic booms, if the F/A-18D took off from Butterworth in a northerly direction, there is nothing but agricultural fields to the north, and few housing to the west before you are in open ocean (less than one nautical mile). The likeliest nearby waypoint imho would have thus been IDVAN, rather than UPTOP. This would take you to the north of Penang Island, so there would be no overland sonic booms. (In any case, living next to an air force base, the occasional sonic boom would not be necessarily particularly noteworthy.)
Consequently, I am not sure the fighter jet hypothesis can really be ruled out. The other thing in its favor is that it provides explanations for multiple puzzles, as discussed in your article.
An intriguing question would be what if the actual intercept did not take place until the 18:22 position. That’s 250 nm in 21 minutes. One of the commentators in the earlier article said an F/A-18D can go about 14 minutes on full afterburner. So let’s say it burned up half that amount (at 7.5 minutes) and then slowed to its cruising speed of 570 knots (just under Mach 1). That would allow an intercept at the 18:22 position exactly at that time. That is of course also the time when all the weird stuff starts happening.
So one can imagine a pilot cruising along at 18:22 thinking he is home free, and all of a sudden there is an F-18 out your window flapping its wings at you and maybe even firing a warning burst of tracers out of the nose gun. At that point a precipitous descent or other maneuvers might make sense. The reboot makes a little more sense if there is a crisis going on.
Thus if someone has a good MFS system, such an intercept might be interesting to program. Here is video of a simulated F-18s “escorting” a 737:
https://www.youtube.com/watch?v=u0AVmzajOIQ
@Warren: Lord, that is a pile of “ifs”.
Since a good few of those still posting here are sharing the plot line of their novels, here’s mine. Z didn’t want to take down the Petronas — perhaps because he knew THAT would end in a shoot-down. But more likely because the flight was just about self-annihilation. His fate was cast to the winds, with passengers and crew as collateral.
Further, I doubt the hot pursuit ideas simply because the Malaysians seemed truly confused. The best indication of that was that the govt didn’t seize on the hijacking to crush the opposition. That would have happened in any moderately repressive, moderately authoritative country. Hell, it would have happened in the US if some Bernie-Bro pilot did such a thing.
@Warren Platts
RE: “Also, the F/A-18D actually is specialized for night missions, so it is perhaps plausible that Butterworth would have had QRA duties at night at least.”
Goodness me, no! The only forces that might have such a capability in that region belong to Singapore and Thailand. The RMAF’s No. 18 Squadron at Butterworth has the sum total of eight F/A-18Ds in its inventory. Of those, at least one or two would be in maintenance at any one time, leaving a force of maybe six airworthy aircraft. The likelihood of Malaysia using those aircraft for QRA is extremely remote. As Mick Gilbert said in a previous comment back in 2017:
“As for the issue of “no attempted military air intercepts”, well that’s just a Boy’s Own Annual fantasy. Most air forces in that region (Singapore may be the exception) do not maintain a quick reaction alert capability (a) because the geo-political environment doesn’t require it and (b) because it is exorbitantly expensive and hard on crews. QRA requires a pair of fuelled and typically armed fighters with flight crews, ground crews, air traffic control and air combat/defence (ground or airborne radar) crews available 24/7. And on top of all that you generally need an air-to-air refuelling capability ready to go if you expect to be able to recover your fighters after they’ve executed an expedited intercept requiring supersonic flight on afterburner. If you don’t have an AAR capability then the effective range of your QRA becomes very limited.”
@Warren Platts
the Cope Tiger 2014 annual joint military excercise between the airforces of Singapore, Thailand and USA were held in Thailand from 10 to 21 March. A few weeks earlier in February, the Cobra Gold 2014 military excercise for army & marines was also held in Thailand. In addition, 2 AEGIS class US Navy destroyers were in close proximity in the South China sea on Mar 7 after having visited Australia and Singapore. So it would not have been unusual to see military aircraft in the area.
MH370 disappeared Mar 7 at waypoint IGARI which is located at a spot where the FIR’s of Singapore, Ho Chi Minh, and Kuala Lumpur meet. It would not be inconceivable for a military ISR aircraft such as the RSAF Gulfstream, or a US Navy P-8 to have taken off from Singapore with the intention of reaching Thailand, or conducting surveillance in the Gulf of Thailand, and would have been able to follow MH370 from IGARI onwards to the mouth of the Malacca Straits.
Was it a mere coincidence that the transponder was turned off just at that moment when the ISR aircraft reached IGARI, or was it actually a rendezvous?
@CannisMagnusRufus
‘It would not be inconceivable for a military ISR aircraft … to have taken off from Singapore with the intention of reaching Thailand, or conducting surveillance in the Gulf of Thailand, and would have been able to follow MH370 from IGARI onwards to the mouth of the Malacca Straits.
Was it a mere coincidence that the transponder was turned off just at that moment when the ISR aircraft reached IGARI …‘
You went from supposition about a hypothetical ISR mission to an actual mission and coordinated rendezvous without any supporting evidence. Perhaps you’d care to fill in the rather cavernous blank?
@Warren Platts
Re: ‘One of the commentators in the earlier article said an F/A-18D can go about 14 minutes on full afterburner.‘
That looks like it’s for an E/F model Super Hornet, a much bigger airframe than the A-D model ‘classics’. An F/A-18C has sufficient internal fuel for about 10.5 minutes on afterburners. The D model operated by the RMAF is a two seater so you trade internal fuel away for that extra seat. You’ll get a smidge under 10 minutes on AB out of an F/A-18D.
It is extraordinarily unlikely that the myriad of personnel that would have been involved in managing a night-time QRA intercept would have remained schtum for five and a half years, don’t you think?
@Mick Gilbert: the other commentator was you, when you wrote “The F/A-18D Hornet can not achieve Mach 1+ with external stores other than the wingtip AIM-9 Sidewinders; that means no external tanks. For a Hornet, supersonic flight requires afterburner. With maximum internal fuel the Hornet can only sustain afterburner for about 14 minutes in total.”
https://mh370.radiantphysics.com/2017/03/02/radar-maybe-captured-fighter-jet-chasing-mh370/#comment-799
So lets say the hypothetical fighter burned up half its fuel in 7 minutes to go 120 nm. That would leave enough fuel to go about 550 nm on cruise, for a total range of 670 nm, thus giving a combat radius of 335 from Butterworth. That puts the turnaround point right about the FMT point Richard has recently proposed. Just eyeballing off of GE, that’s about 7.5N 95E. Coincidence? 😉
As for keeping schtuck, that’s the thing: CNN did indeed report an unnamed senior government official as claiming that Royal Malaysian Air Force (RMAF) fighter jets were scrambled. Make of that what you will….
lkr wrote “Z didn’t want to take down the Petronas — perhaps because he knew THAT would end in a shoot-down.”
Well, then that would require MRAF to have the ability to scramble fighter jets. Obviously, Razak and Hishammuddin realized after the fact that they dodged a bullet. The Petronas Towers could have been taken down. As bad as MH370 was, that would have been a whole lot worse tbqh.
Thus, even if the RMAF were able to get a fighter into the air by 18:01, it would have been too late to prevent an attack on the Petronas Towers. So that’s an embarrassing narrative. The defense ministry ran by Hishammuddin would be perceived to be incompetent.
So it’s understandable imho that they might want to change the narrative to: No fighters were scrambled because MH370 never was a threat to any ground targets. How do we know? Well, obviously nothing happened. Thus what is the point of scrambling fighter jets? What are they going to do? Shoot down an airliner filled with hundreds of passengers that was not a threat to a high-value ground target? Only the Americans would do something like that!
@Warren Platts
Well, let me update that 14 minutes to less than 10 for an RMAF F/A-18D as I must have been originally looking at E/F fuel quantity data.
The F404 burns 1.74 lbs of fuel for each lbf of thrust per hour (177 kg/kN/h). Maximum thrust is 17,700 lbf (78.7 kN) with afterburner. So total fuel burn per hour at max AB is 17,700 x 1.74 x 2 lbs
= 30,798 x 2
= 61,596 lb/hr
= 27,939.4 kg/hr
= 466 kg/min
Maximum internal fuel weight for an F/A-18C is 4,926 kg (10 min 34 seconds); D model is 4,630 kg (9 min 56 seconds).
After the 7 minute dash on AB you’ve got less than 1,400 kg of fuel remaining. That’s enough for about about 15 minutes flying at 2/3 military power. You’re not going to come close to the required 240 nm combat radius to get close to the last radar contact leave alone to the proposed FMT.
A 7 minute AB burn is going to leave you swimming home. I’m pretty sure that someone would have noticed that.
As for Butterworth’s alert status, note that “Quick Reaction Alert” seems to be a RAF/NATO term of art. The Americans don’t use that language, yet they have several bases in CONUS that can launch fighters within 5 or 10 minutes or less. (In general, worldwide typical launch times seem to range from 2 to 20 minutes.) Thus you’re not going to find anything on google about MRAF QRA’s.
However, I did manage to find this piece by Lim Kit Siang, a DAP parliamentary leader and MP for Gelang Patah regarding the alert status of the MRAF:
“Hishammuddin has denied the CNN report [re: scrambled jets], describing it as “a false allegation”.
Who is right, Hishammuddin or CNN?
Unless CNN is prepared to name the “senior Malaysian government official and another source” to substantiate its report, it would be difficult for anyone to accept it as gospel truth.
But the bare denial by Hishammuddin, after the drips and drabs of information being doled out; clarifications, confusions and contradictions; frequent twists and turns and “flip-flops” and the vast “black holes” in information in the past 35 days of the MH370 disaster is just not adequate, satisfactory or acceptable….
In fact, the Parliamentary Select Committee could not only inquire whether RMAF had scrambled search aircraft that morning but also:
Whether or why there was no scrambling of RMAF search aircraft when the military radar tracked MH370 as having diverted from its Kuala Lumpur to Beijing course, when in the first few minutes between 1.40 and 1.45am, at least two RMAF Sukhoi-30s from Gong Kedak could have been scrambled to intercept the jetliner in Kelantan airspace; and,
Why a second chance was lost to intercept the plane when it approached Penang and was picked up on the military radar in Butterworth, although the RMAF with its F/A squadron was on 24-hour standby at the airbase.
These and many other questions have been awaiting answers in the past 35-days of the MH370 disaster, but as I said in Parliament in the presence of the Prime Minister Najib Razak and Hishammuddin on March 25 (18th Day), I agree that the utmost priority must continue to be given to SAR – search and rescue – operation and the many questions that have arisen about the whole tragedy, including the crisis management, can wait until the discovery of the aircraft and hopefully, the passengers and crew on board.”
https://www.malaysiakini.com/news/259738
So here’s a government official in a position to know who claims there are at least two bases capable of scrambling fighters at short notice.
Also, the first person who denied (and it was a vehement denial) CNN’s scrambled jet story was Hishammuddin himself. Anything that guy says, the opposite is more likely to be true. Even fellow government officials take what he says with a grain of salt.
We must be careful to avoid stereotyping the RMAF as a bunch of tropical inhabiting, lazy, incompetent, 3rd world Malays. Zaharie himself was certainly a highly competent pilot; albeit, since the RMAF apparently weren’t able to launch until about 18:01–if that in fact happened–that shows they nevertheless did indeed drop the ball that morning. But to state baldly that fighter jets were not launched because the RMAF simply does not have the capability to launch fighters on short notice, I don’t think the evidence warrants that. ymmv
As for the orignal CNN story, it is apparently gone from their website. Am trying to track it down on the wayback machine.
@Mick Gilbert
You went from supposition about a hypothetical ISR mission to an actual mission and coordinated rendezvous without any supporting evidence. Perhaps you’d care to fill in the rather cavernous blank?
Most commenters here would agree that ZS did turn off the transponder. But there is disagreement as to WHY he did this.
Was it for the purpose of diverting the aircraft and flying it to the SIO?
Or was it merely to turn off, then turn it back on again at some point later on in the journey to Beijing? If it’s the latter, then a rendezvous with an ISR aircraft makes sense.
@CanisMagnusRufus: I really don’t understand your line of thought, so can you please be clear about what you are proposing? A rendezvous with military planes would serve what purpose? We know the plane turned back to fly over Malaysia based on the primary radar data, the cell phone connect, and the satellite data, so the plane definitely did not continue on to Beijing.
@Victor Iannello,
We know the plane turned back to fly over Malaysia based on the primary radar data, the cell phone connect, and the satellite data, so the plane definitely did not continue on to Beijing.
I agree the plane didn’t continue on to Beijing. The flight didn’t go according to plan because the moment ZS turned off the transponder, the flight essentially became a ‘renegade’ liable to be shot down by any aggressive air force in the region. So any In-Flight Security Officer (IFSO) on board the aircraft would be within his rights to re-take control of the aircraft and fly it to the nearest airfield, which in this case would be Penang, IF the aircraft had been challenged by fighter jet.
Of course, the IFSO(s) in this case had no intention of landing the aircraft at Penang either, but to make the aircraft disappear over the Indian Ocean. They would escape the aircraft by parachute or ditch the aircraft and disclose it’s location to the Chinese who would retrieve the wreckage and black boxes.
A rendezvous with military planes would serve what purpose?
I believe the original intention of ZS was to aid in the surveillance operation conducted by the RSAF Gulfstream, or the US Navy P-8, or even the new RAAF Wedgetail over the South China Sea. The common adversary in this region would be China, so activities of the PLAAN would be a legitimate target for surveillance.
ZS would turn of the transponder over the segment of the journey over the South China Sea, while one of the ISR aircraft ‘spoofs’ the transponder signal of MH370. The Chinese would assume the transponder signal belongs MH370. The Chinese wouldn’t think of suspecting or shooting down a planeload of their own citizens bound for Beijing.
@Mick Gilbert wrote:
“= 30,798 x 2
= 61,596 lb/hr
= 27,939.4 kg/hr
= 466 kg/min”
I like your analysis! I made my own spreadsheet and got the same result–about 9.97 minutes at maximum warp.
But what if there was no supersonic flight? I guess by military thrust, that’s what is used for the stated cruise speed (wikipedia) of 570 kts. Assuming no drop tanks, then (4630/2 kg) / 83 kg/kN/hr / 49.9kN = 34.22 minutes of endurance.
If cruise speed is 570 kts, then total range 325 nm. Maybe enough to get out to FMT, but not to come back. So that obviously did not happen.
So for the sake of the argument, lets just say there were drop tanks with enough fuel to double that range to say 650 nm, and assume no supersonic flight.
Assuming a straight line from the 18:07 point back to Butterworth, that’s about 103 nm. At 570 kts, a fighter could get there in about 11 minutes, implying a takeoff time of around 17:56. So maximum warp would only have shaved 5 minutes anyway. Not worth it. Also MH370 at that point would have rounded Penang and OPOVI, heading WNW, thus justifying an initial vector for the fighter toward VAMPI or MEKAR.
Now the interesting question is where we should expect the intercept to take place.
I estimate the average speed of MH370 for the stretch from 18:01 to 18:22 to be 498 kts. Also, iirc, I believe the thinking is that there was about a 10 knot average tailwind in the Malacca Strait at the time. So adding that to the cruising airspeed of the F/A-18D gives a ground speed of 580 kts.
According to the chart analyzing the anomalous radar echo at 18:07:06 that Victor provided, MH370 would have been right at the edge of the white circle, giving MH370 an approximate 20.5 nm headstart.
https://mh370.radiantphysics.com/wp-content/uploads/2017/03/LidoImageTimestamps.png
Thus, given those starting assumptions, the F/A-18D would catch up to MH370 at precisely 18:22:06–exactly one turn of the radar antenna before the final echo at 18:22:12.
Down the rabbit hole we go…
Consider that a rendezvous at 18:22 might even explain the final ping: two F/A-18Ds aligned on each wingtip of a B-777 would effectively increase the radar cross-section of the B-777 and would show up as a single target. Evasive action on the part of MH370 would then cause the target to disappear.
Yes, of course, the model presented here is sensitive to starting assumptions. But it does demonstrate that a fighter jet (probably there would have been two, actually) scrambled after MH370 rounded Penang and flying at subsonic speeds would have been able to intercept MH370 about when all the craziness began. From there the fighters would have slowed down and been able to escort MH370, but only for a little while. If the operating radius was 325 nm, they probably would have had to turn back somewhat before most proposed FMTs.
Bottom line: the fighter jet hypothesis has yet to be properly falsified. imho ymmv
@CanisMagnusRufus: I suspect you are serious.
@VictorIannello
When yourself and others insinuate that Captain Shah committed mass murder and suicide, should I think you are serious?
@CanisMR: Fair enough. I believe your scenario falls short in multiple ways, but I’m also very supportive of exploring alternative scenarios that fit the data. Let’s see what others think.
B737 MAX reporting
Sully returns serve to Langewiesche.
http://www.sullysullenberger.com/my-letter-to-the-editor-of-new-york-times-magazine/
@Warren Platts
Warren, there’s a different specific fuel consumption figure for the F404 when running ‘dry’ (not using afterburner), that is 0.85lb/hr/lb thrust (86.5 kg/kN/h). Maximum military (dry) thrust per engine is 11,000 lbf (48.9 kN).
The standard QRA configuration for just about every air force around the world is for at least one external tank to be fitted. The RMAF Hornets are routinely seen fitted with a 330 gallon (1,018 kg) centreline tank.
An intercept is not impossible, just highly unlikely given the circumstances on the night and the lack of subsequent confirmation.
@Mick
“Sully” expresses my opinion perfectly. The B737 MAX was poorly designed, and should not be returned to service. Boeing is entirely culpable in the crashes that occurred, and their credibility in the effectiveness of the “fix” should be virtually discarded.
@Dennis
The B737 MAX was poorly designed …
There is little to doubt about that statement. The JATR has generously laid down the framework that needs adopting by “all parties” when certifying the airworthiness of any Air Transport aircraft.
Unfortunately for Boeing, the time-frame to remediate the MAX has now drifted way over the horizon; becoming a real blot on their bottom line.
@Barry
Yes. The B737 problems will be a drag on Boeing.
In private emails several colleagues, who have a history with Boeing (myself included) have remarked on the change in the company over the last decade or so.
@Mick, I see that the F/A-18D can carry one centerline 330 gallon external tanks plus 2 330 tanks under each wing. But let’s assume there is only the single centerline tank, thus total fuel mass is 5,648 kg.
At a military thrust fuel consumption rate of 86.5 kg/kN/h (14.84 kg/nm), to reach the proposed intercept point at about the last radar detection (about 250 nm from Butterworth AB), that would require approximately 3,710 kg of fuel, leaving a balance of 1,938 kg.
Now, I found fascinating flight manuals for the F/A-18 here:
https://info.publicintelligence.net/F18-ABCD-000.pdf
https://www.dropbox.com/s/ofpu3nn9mp8hd19/NATOPS%20Flight%20Manual%20F-18%20Performance.pdf?dl=0
There’s a reference in there that long range fuel consumption is 4,000 lbs/hr that equals 1,818 kg/hr. Assuming an average speed of 410 kts that would allow slightly more than an hour of flight time with a range of perhaps 435 nm.
This in turn would allow the fighters to pursue MH370 for roughly 95 nm. Attached is an overlay of Richard’s most recently proposed FMT with the offset. Assuming the fighters would continue to escort MH370 after the interception, the BINGO point (where there is barely enough fuel left to return to base) winds up at about 7.5N 95.1E, just shortly before the FMT. It’s pretty uncanny how nicely it works out actually.
https://i.imgur.com/v9ynHIm.png
Mick said, “An intercept is not impossible, just highly unlikely given the circumstances on the night and the lack of subsequent confirmation.”
So we agree an intercept is not impossible. As for the circumstances of the night, I also agree it was completely FUBAR. But that simply explains why the F/A-18Ds were scrambled at the last minute after MH370 had already rounded Penang.
As for subsequent confirmation, it WAS confirmed: a member of Parliament, Lim Kit Siang, is on record as saying Butterworth is on 24-hour alert status, a senior RMAF officer told CNN that a mission was launched, not to mention the unexplained but apparently real 18:07 anomalous echo itself. If it was not a fighter jet, then it must have been a UFO. We know from FlightRadar 24 that the echo was not another airliner–correct me if I’m wrong.
And at the end of the day, the only concrete evidence that an intercept missions was NOT launched–that is not mere speculation about the capabilities of the RMAF–is Hishammuddin’s denial. And how much weight should we grant that? We know for a fact he is a liar and stonewaller.
As for CNN’s credibility, they certainly have been known to publish fake news, but why would we expect the reporter to lie? Thus if it was fake news, the unnamed senior RMAF officer must have been spreading disinformation. But again, why do that?
Therefore, we must conclude that the CNN report is more credible than Hishammuddin’s assertion for which he provided no evidence. We know Butterworth was in fact on alert status, we know the F/A-18Ds with a single centerline external tank had the capability to conduct the mission and safely return to base without refueling, and we know the fighters at military thrust could easily get to the 18:07 anomalous radar echo if scrambled after MH370 had already rounded Penang. Thus, altogether, it seems to me, at least, that there is more evidence that the intercept took place than evidence that the intercept did not take place.
Again, imho, ymmv.
PS I saw that someone found that .kml list of SIO waypoints useful, so here is the link again in case others would like to upload them to their google earth.
https://www.dropbox.com/s/b7jbhoh8dp3eace/waypoints.kml?dl=0
@Warren Platts
Hish’s infamous admission of no jet-fighter intercept is consistent with everything we know from PM Razak down thru Hish himself, Boeing, Inmarsat, USA, CIA, FBI, NTSB, ATSB, AAIB and so on. In the early days there was the Joint Investigation Team, and while we unfortunately do not know the confidential detais, it is obvious that the JIT concluded MH370 was intentionally diverted and flew unchallanged thru the Malacca Straits. The JIT finally convinced PM Razak to admit intentional diversion on 15-March-2914. Malaysia at this point had to cooperate (behind the scenes) with international scrutiny because the world needed to know if this event was international terrorism or not.
Interesting question would be, in the wake of MH370, does the region now employ intercept capability for wayward aircraft like EU and USA do? Let’s face it, part of the reason MH370 happened in Malaysia, and not USA or EU, is lax security, no intercept, probably no air marshalls, allowing only 1-in-cockpit, no sterile cockpit rules (stay off cell phones) etc etc.
@Warren Platts
RE: “…a senior RMAF officer told CNN that a mission was launched…”
The report you previously quoted states:
‘Quoting a senior Malaysian government official and another source involved in the investigation, CNN reported that “Malaysian air force search aircraft were scrambled around 8am, soon after Malaysia Airlines (MAS) reported that its plane was missing early March 8.”
That’s a bit late for an intercept, no?
“PM Razak down thru Hish himself, Boeing, Inmarsat, USA, CIA, FBI, NTSB, ATSB, AAIB and so on.”
Razak and Hishammiddin are not trustworthy, and none of the others mentioned would have any special knowledge. How would Inmarsat or Boeing have independent knowledge of an intercept mission? As for the CIA, even if they knew, they wouldn’t be able to say anything because that would reveal sources and methods.
Yes, the 8am time is puzzling. Either something was lost in the translation, or they were referring to actual “search” aircraft at 8 am knowing the plan was probably lost. But then why use the language of “scrambling.” Ordinary search aircraft don’t get “scrambled” afaik.
As for CNN, they defended their story. The main source had a proven track record: he was the first to leak the knowledge that the plane had diverted to the left and crossed Malaysia days before the government acknowledged that fact. Also, that source’s story was independently confirmed by another source, although the two sources disagreed about the 3 day delay in notifying the civilian sources.
I still cannot find the original story.
@Warren Platts
Thanks for sharing the kmz file.
The thread has veered from its course, IMHO, where we continued to study and discuss the “objective” evidence of the flight path of MH370. Unless a hypothesis being proposed is tied to a sufficient quantity of data, I cannot see that it contributes to the discussion. (This criticism does not extend to the technical analysis of a possible scramble and intercept range.)
From a technical point of view I see the following as interesting points to discuss:
Richard has proposed that the previously adopted IG path from NILAM to IGOGU and a new path extension from BEDAX and then ISBIX (180T) satisfies the criteria for a valid path and has a descent between NILAM and IGOGU.
Questions raised by this are:
Could the ACAS system have been turned on after NILAM (at some point prior to the FMT) without alerting any ground based systems? It is a short range system and ground based receivers (SSR)are not within range. This would obviate the need for a descent to cross the other tracks in the unlikely event that a collision is imminent. The nominal range of ACAS is 20 nmi and being a high altitude emitter, is not subject to significant ducting.
Richard has eliminated the path through AGEGA as not being consistent with the BFO/BTO at NILAM.
Warren Platts has postulated that a turn at NILAM to POVUS and then ISBIX +189. I can not eliminate this path on BFO/BTO grounds after a FMT at 18:40 at POVUS. A fuel analysis would be useful. Also, the details of the turn at NILAM (BFO/BTO) have not been published and a careful look at this aspect of the proposed path would be worthwhile.
These are questions to be thought about in order to solidify any selection of a single path.
Please note that only the first paragraph was intended to be directed to Warren Platts.
@Sid
In my opinion we have headed down a questionable path. Victor, DrB, Richard,…just about everyone is trying to become the Nate Silver of path prediction focusing (focussing for those who prefer British English) on aleatory predictions. The reality is we have epistemic uncertainly. I prefer the Taleb position summarized nicely by Dr. Isaac Faber below.
https://towardsdatascience.com/why-you-should-care-about-the-nate-silver-vs-nassim-taleb-twitter-war-a581dce1f5fc
We simply have no way of making an actionable decision relative to searching for the aircraft. While Richard et.al. contributions are appreciated, they are, like Silver’s predictions, probabilities and should not be confused with a pin in a map.
@Sid asked: Could the ACAS system have been turned on after NILAM (at some point prior to the FMT) without alerting any ground based systems?
No, that’s not possible. If TCAS is operational, so is the SSR transponder.
@VictorI
Which SSRs illuminate the plane after NILAM and to what distance?
Just need to turn it on when crossing known high altitude tracks.
@DennisW
There is a difference between predicting the future and analyzing the past.
There is a difference between physics and sociology.
There is a difference between engineering and …
The only defect in my reasoning is that the searches to date have not found the plane. The reason for that has yet to be determined.
OK, lemme get this straight: the function of the ACAS systems is to help the pilot avoid collisions with other aircraft?
A traffic collision avoidance system or traffic alert and collision avoidance system (both abbreviated as TCAS, and pronounced /tiːkæs/; TEE-kas) is an aircraft collision avoidance system designed to reduce the incidence of mid-air collisions between aircraft. It monitors the airspace around an aircraft for other aircraft equipped with a corresponding active transponder, independent of air traffic control, and warns pilots of the presence of other transponder-equipped aircraft which may present a threat of mid-air collision (MAC).
ACAS / TCAS is based on secondary surveillance radar (SSR) transponder signals, but operates independently of ground-based equipment to provide advice to the pilot on potentially conflicting aircraft.
Well, if you are piloting an aircraft while being harrassed by a pair F/A-18D’s at extremely close, dangerous quarters, then maybe turning the ACAS on would be a good idea?
Hasn’t it always been something of a mystery as to why the ACAS was rebooted?
@Sid
The only defect in my reasoning is that the searches to date have not found the plane. The reason for that has yet to be determined.
Possible reasons the plane has not been found:
1> The plane is farther from the 7th arc in the latitudes searched.
2> The plane was “missed” in the latitudes searched.
3> The plane is not in the latitudes searched.
The BFO data contradicts 1>.
A reasonable estimate of 2> is 10% probability.
@DennisW
1> https://avherald.com/h?article=4a5e80f3. Particularly look at the flight data recorder traces in the appendix.
2> 10% is a large number compared with the probability density of finding the plane in a new location, unless there is some other evidence that I am not aware of.
3> Do you have a reasoned proposal?
@Warren Platts
TCAS uses the technology of the transponder but employs a separate interrogator using the “same” technology as the SSR does to receive transponder signals. It is a short range system.
It operates independently of the SSR being present, else it would not be operable in any area not covered by SSR. It seems to me that the only danger is that the aircraft would be illuminated by a SSR and that then a transponder signal would be emitted in response to the SSR illumination of the aircraft.
Is there someone I could submit a theory of what happen to MAS 370. I have worked on this theory since the beginning. I have so much evidence to show the crash site to a 25 mile search area. It will explain not only the location but the reason behind what went wrong. The disappearance happen because of these 3 things. Human error, fatigue and a poor training program. If you were to break my theory apart. Any one cause happens a few times a year with no major impact other then a rules violation. When you look at my theory in a whole. You would say the odds of that happen are high. I would like to state. Is we went back to 2014 and asked the odds of a Boeing 777-200 disappearing without a trace would be just as high but in fact did happen. What would be the harm in exploring my theory to see in fact using my minute by minute flight path with gps. The errors that were made and in fact are the conclusion I have reach that hard to believe. I promise you this. If you look at my theory, you just might end the world biggest aviation mystery. I would also like to say. TWA 800 was in fact found because of one person. So please before you dismiss my theory Know I have worked on it for over 5 years. I have all the proof anyone could ever ask for. I just don’t have a team of people to put it all together in a nice package. I don’t claim to be super smart. I’m just one person that looked outside the box and followed what in fact is the most likely thing to have happen. It bears repeating. Any single event Taken alone has already happen if not happens more times then we like to think. What makes my theory hard to believe is that a Series of events happen that the likelihood of everything happen on the same flight are highly and unlikely, but I believe they did and would be happy for you to just read my conclusion. Thank You for your time Edmund Skerritt
@Edmund Skerritt: Rather than creating a long comment with your theory, please provide a link so anybody interested can read it.
> Sid Bennett says:
> https://avherald.com/h?article=4a5e80f3
> Particularly look at the flight data recorder traces in the appendix
That’s interesting, but could someone explain to me, how the vertical acceleration can result in the depicted altitude changes? They don’t seem to match?
@Warren Platts
Warren,
Re: ‘Thus, altogether, it seems to me, at least, that there is more evidence that the intercept took place than evidence that the intercept did not take place.‘
You actually don’t have any evidence at all that an intercept took place. Evidence of capability is not evidence of use.
Re: ‘But then why use the language of “scrambling.” Ordinary search aircraft don’t get “scrambled” afaik.‘
Ordinary search and rescue aircraft are probably scrambled at least as frequently as military assets like fighters given the number of SAR events compared to hostile or inadvertent airspace intrusions. A quick Google search turned up half a dozen reports of SAR aircraft being ‘scrambled’ over the last twelve months.
@Warren Platts
RE: “We know Butterworth was in fact on alert status.”
We don’t ‘know’ that at all, we only know a politician suggested that a hypothetical parliamentary select committee should enquire “Why a second chance was lost to intercept the plane when it approached Penang and was picked up on the military radar in Butterworth, although the RMAF with its F/A squadron was on 24-hour standby at the airbase..” His comment indicates that an intercept did NOT take place.
It seems to me the RMAF response was limited to the launch of ‘search’ aircraft at 8.00am, as reported by CNN. Such a response is in keeping with the lackadaisical response of every other party following the aircraft’s disappearance – too little, too late.
@Sid Bennett
RE: “The nominal range of ACAS is 20 nmi and being a high altitude emitter, is not subject to significant ducting.”
TCAS is required to provide reliable surveillance at short ranges, but it is possible to ‘see’ other TCAS traffic at ranges up to about 50-60 nm.
@Warren
I get “scrambled” a lot for SAR at my ranch in rural Stonyford. The county sheriff is aware that my frequent dirt bike excursions give me an intimate knowledge of the area, and I have several 4×4 vehicles at my disposal.
A typical parental conversation:
Dennis: What type of vehicle did your son use to get here?
Parent: I don’t know. He went with friends.
Dennis: What type of motorcycle is he riding.
Parent: A blue one.
@Warren Platts;
All the nonsense regarding an alleged RMAF F/A-18D QRA from the Butterworth airbase, doesn’t wash with me.
1.. The RAAF has a presence at RMAF Butterworth.
2.. Retired Air Marshall ‘Angus’ Houston was appointed by the then Australian prime minister Tony Abbott to give the government inside oversight into the nature of the MH370 incident and associated matters regarding a search for 9M-MRO.
Any extraneous activity taking place at Butterworth would undoubtedly have been reported back to Canberra, and even Tony Abbott would have abandoned any course of action that included obfuscation of events that would ultimately land in the public domain if and when the DFDR / CVR were located.
I keep meaning to post this link and keep getting sidetracked. Here it is: Nic Robertson defending CNN’s story regarding “scrambling”. I still cannot find the original CNN story, however.
https://www.cnn.com/videos/world/2014/04/11/newday-robertson-malaysian-search-aircraft.cnn
@Warren Platts: In the clip, Nic Robertson is defending the accuracy of CNN’s story about Malaysia’s dispatching military aircraft at 8:00 am on Saturday morning to search for MH370. That is very different from dispatching aircraft to intercept the aircraft as it passed back over Malaysia at 1:30 am to 2:00 am. Yes, the word “scrambled” is used, but it is in the context of a search, not an intercept.
@Andrew
I understand that the maximum detection (display) range is 40nm in the direction of travel Since the TCAS display does not provide a specific identification of a plane, the other aircraft would not be aware of MH370 per se. Further, since MH370 would be aware of the other traffic and take action to avoid conflict, it would be unlikely that any other plane would report an alert.
Since MH370 would be out of the range of the SSRs, the transponder would not be detected.
The only possibility would be ELINT, but the volume of standard traffice mitigates against any intel value of collecting such information.
Gentlemen,
We need to lay to rest the idea that Butterworth was not on alert status on the early morning of March 8. The Malaysian MP Lim Kit Siang said it was:
https://www.malaysiakini.com/news/259738
If a US Congressman on the Defense Committee said that Warren AFB in Wyoming had fighters on alert status, I would believe him or her. Note also that he did not say that an intercept mission was not launched: he was actually actively questioning Hishammuddin’s account.
As for the RAAF having a presence there, and therefore, the Australian Prime Minister would necessarily know about any such missions: (a) having a “presence” in Penang doesn’t necessarily entail that you’re standing mindless, 24-hour alert watches. That is the Malaysians’ job. Rather, your job on a Saturday night in Penang if you are RAAF is to drink as many beers as you can, and then get a good night’s sleep. The mission would have been done and over with before they woke up. Trust me: I have been USN in Penang. I know what it’s like there despite being a nominal Muslim country.
(b) If any RAAF personnel knew about an intercept mission, but were told to keep their mouths shut, they would do what they were told. Australian military personnel take pride in knowing how to keep secrets.
(c) If Australia has such leverage and “oversight” over the MRAF, then why doesn’t Australia release the radar data? Answer: they probably don’t have it, and they can’t get it.
Consider this argument: if the ultimate goal was to disappear in the middle of the SIO, then why not simply double back, fly directly over Kuala Lumpur, then directly over Sumatra, and then you’re out there with lots of fuel to go the extra distance?
The answer, obviously, is a desire to avoid scrambling fighter jets. And the only reason for that worry is that Malaysia and Indonesia actually have that capability.
Thus, taking advantage of the Kitty Genovese effect, the flight back straddled the Thai/Malay border. Then there was the dash up the Malacca Strait–thus avoiding Indonesian airspace.
————————————–
It is at this point that the fighter jet hypothesis actually brings some coherence to the situation.
The one question that has always bugged me from day 1 regarding an FMT way up by IGOGU is: WHY???
If the “ultimate goal” is to disappear into the middle of the SIO, then why take a 100 nm detour into the Andaman Sea? Instead, wouldn’t it be better to simply take a left at NILAM, then another left at POVUS, and then you’re home free?
But what if the simulated bread crumbs left on the hard drive really was Plan A? After all, MH370 did, briefly, rejoin the simulated path at Pulau Perak, and apparently followed it up until the FMT up by IGOGU or wherever–if my idea that there was a left turn at NILAM was not the case.
It kind of makes sense. Making the cut around the northern tip of Sumatra is not without risk of potential interception. But the Andaman Islands are not much of a risk (there are no Indian Air Force bases there as far as I know–correct me if I’m wrong), and once you get out to that point #3 in the simulation at about 8.5N 90E, however, you’re well out into the ocean, and unless you happen to overfly a carrier battle group, you will probably be fine.
But if one is intercepted at about the last radar point at, say, 18:22, the situation changes. A dive would be in order to: (a) evade; (b) send a message to back off on threat of crashing into the ocean with 200 people on board; (c) force the fighters to use up their fuel supply by flying at low altitude.
One might also want to turn on the Automated Collision Avoidance System (ACAS)–that is otherwise completely inexplicable–in order to help avoid a Hainan Island-style collision.
But other than some aggressive maneuvering, what else could a fighter jet really do? You can’t just shoot them down, given that they are not threatening any skyscrapers.
So then the chase would devolve into a slow motion O.J. Simpson-style chase until the fighters reached the BINGO point. Then they would have to return to Butterworth.
At that point, consider what you would do. You have been found out. They know the direction you are heading. Thus, there is a risk that more fighters could be sent. At that point, an improvised Plan B would be in order. A change of direction–the FMT–and take the risk of the Andaman/Sumatra Strait.
That would explain the 100 nm detour. The aircraft would already be at low altitude, so risk of radar detection would be minimized. And one could always rejoin Plan A at MUTMI after overflying ISBIX. (or head for South Pole or IGPOL or wherever.)
———————————-
Yes, I get the bottom line objection: if there had been an intercept mission, we would know about it. But then again, we know for a fact that information IS being withheld. Why does the official radar data peter out shortly after Penang when we know for a fact it extends out to at least 18:22? They have it, but they are not sharing it. And that is for a good reason (one of which would be to cover up a potential, failed intercept mission). As DennisW once said, information assymetry is a valuable thing…
And we HAVE been told about it in the CNN report! And there is that 18:07 radar ping that could not have been MH370.
If the CNN report was just about a SAR mission after the Sun was up, then why deny it. What is the harm with a SAR mission 2 hours after the Sun comes up? There is none, therefore, there is no need for a denial.
But to admit to an intercept mission that started after the Penang turn would be to admit the truth: that the RMAF and Defense Ministry–ran by Hishammuddin himself–was caught with their pants down. Hence the narrative that no fighter jets were scrambled because they thought the UFO coming in on their radar was a “friendly”.
Bottom line: the intercept hypothesis cannot be falsified on Hishammuddin’s word alone. That the Australians didn’t know about also does not prove anything.
One way to rule out the fighter jet theory would be to show that it is technically impossible. But that, apparently, cannot be done.
The more I dig into it, the more plausible it seems: a scramble after MH370 rounded Penang, a vector approximately towards VAMPI at military thrust, followed by a slow-speed chase almost up to Richard’s proposed FMT works out rather nicely actually. Therefore, I cannot see the harm in pursuing this lead to its logical conclusion, regardless of what CNN or Hishammuddin said.
For anyone else that wants to fool around with the F/A-18 capabilities, the Specific Range charts start at page 11-94 of the supplementary flight manual. But given that we don’t know the weight of the fighters, nor their altitude, nor their Drag Index, there is a lot of leeway in potential scenarios, even if we assume military thrust followed by optimum cruise thrust fuel flows.
https://www.dropbox.com/s/ofpu3nn9mp8hd19/NATOPS%20Flight%20Manual%20F-18%20Performance.pdf?dl=0
Sorry for the length! 🙂
@Peter Norton
The rate of climb/descent is not one of the displayed parameters. The altitude and vertical acceleration are. Looking at the first figure, the vertical acceleration has a negative excursion from 00:39:04 to 00:39:12 (8 seconds). As an eyeball estimate, the average is -1.5g during that period (since we are dealing with aircraft, the non-use of MKS units is reasonable). So, if 1 g=32ft/sec/sec, then the vertical velocity at 00:39:12 would be 8x32x1.5=-384fps or -23,040fpm. Wow!
At least that is a rough order of magnitude.
On the next graph, you can see that the altitude change between 00:39:20 and 00:39:25 is 2500ft. This implies a rate of descent during that time of 2500×60/5=-30,000fpm.
Subsequent to 00:39:14 the acceleration becomes positive, coinciding with the reduction in rate of descent and the recovery from the dive.
I am not asserting that it happened with MH370, but it is not as implausibe as has been claimed.
Thanks to Barry M for bringing the article to my attention.
@Sid Bennett: Nobody (at least nobody actively contributing to this blog) is claiming that the increasingly steep descent (downward acceleration of 0.67g) implied by the final BFO values could have not have been followed by a gentle pull-up and then a long glide, ending in a steep descent and crash. That scenario has very much been left at the table. The questions that we ask ourselves are why was it possible done, and is there a high probability it was done.
@VictorI
Please note that my original post of the article was to answer a remaining skeptic.
One possibility is that the original intent was to glide the plane from altitude and that due to a lack of experience with the fuel exhaustion scenario, the pilot momentarily lost control of the plane.
Can someone familiar with actual pilot training comment of how often such a scenario is trained?
In my mind, we are now looking at what we would have previously termed low probability events, since the search was said to be at least 90% effective in the prime areas.
Sid wrote: “TCAS uses the technology of the transponder but employs a separate interrogator using the “same” technology as the SSR does to receive transponder signals. It is a short range system.”
So, basically, the purpose for turning it back on would be to improve MH370’s local situational awareness from what can be seen through the cockpit windows, to a local radar picture of any nearby aircraft. Is that about right?
That raises the question, having already endured the most harrowing portion of the flight, why would there be a need to be aware of any nearby aircraft? While the risk of a headon collision with a passing airliner is not non-negligible on an everyday operating environment, on any given night for a given airplane, such odds are very, very tiny….
And do we know for a fact exactly who it was that placed the 18:40 phone call? I can imagine that if F/A-18Ds intercepted at 18:22, followed for 15 minutes or so, and then turned back, they would have radioed home: “The pilot of the Malaysian Air 777 will not listen to us and is still heading WNW.” At which point someone might have reasoned, “Well then, lets try the phone. Maybe he will pick up.”
These is the main reason why I kind of like the fighter jet hypothesis. It provides a coherent explanation for several events between 18:22 and 18:40 that otherwise appear inexplicable:
1. The 18:07 anomalous radar plot
2. BFOs indicating a steep descent or sharp turns starting shortly after 18:22
3. The rebooting of the ACAS at 18:25
4. The timing of the 18:40 phone call that just happens to coincide with a major turn
5. The FMT itself
@Warren Platts
Please remind me. How do we know the ACAS was re-booted at 18:25?
A descent somewhere between 18:22 and 19:41 has been postulated as part of some hypothetical paths. One reason to do this is to avoid crossing traffic.
How does MH370 know that an intercept is being attempted? Is it that the interceptor is calling by VHF radio?
Do we know that the phone call was initiated by the MAL dispatcher? If so, is there any rationale for the timing of the two calls. Odd that there were no re-trys shortly after the failure to connect. Not what I would have done.
@Sid Bennett
RE: “I understand that the maximum detection (display) range is 40nm in the direction of travel”
Having flown TCAS-equipped Boeing and Airbus aircraft for many years, I can assure you the TCAS system may display non-proximate traffic well outside the figures you quoted. Indeed, the Airbus A330 FCOM states that the maximum range is approximately 30 NM to 100 NM longitudinally, depending on external conditions. Bearing information might not be accurate at very long range, but the traffic might nevertheless be detected.
@Sid Bennett
RE: “One possibility is that the original intent was to glide the plane from altitude and that due to a lack of experience with the fuel exhaustion scenario, the pilot momentarily lost control of the plane.
Can someone familiar with actual pilot training comment of how often such a scenario is trained?”
In my experience, airline pilots are not specifically trained in the fuel exhaustion scenario. However, they are trained in engine failures during the cruise and a dual engine failure scenario caused by volcanic ash. The aircraft is easily controlled in such scenarios.
@Warren Platts
RE: “We need to lay to rest the idea that Butterworth was not on alert status on the early morning of March 8. The Malaysian MP Lim Kit Siang said it was…”
I think you place too much faith in the pronouncements of politicians! Lim’s statement is not proof that Butterworth was on ‘alert’ that night. Even if it were true, what does ’24-hour standby’ actually mean? As discussed previously, it is extremely unlikely the RMAF had a quick readiness capability and even if they were able to launch aircraft within an hour, MH370 would have been long gone, with no possibility of an intercept.
You have obviously convinced yourself otherwise, but there is no evidence that RMAF aircraft tried to intercept MH370. The only credible report is the CNN story that ‘search’ aircraft were launched later that morning,
@Andrew asked: Even if it were true, what does ’24-hour standby’ actually mean?
In this case, perhaps it means to standby for at least 24 hours doing nothing, and then release incorrect statements afterwards?
@Victor
LOL – I thought something similar!
@Victor & @Andrew, the exact wording of the MP Lin was “F/A squadron was on 24-hour standby at the airbase.” The plain sense meaning is that Butterworth had “QRA” capability. Here is another article by a former MRAF airman who was given a tour of a Malaysian air defense facility.
https://seademon.me/2014/03/20/mh370-i-speak-out/
The photographs he provides of the facility and the airmen manning their stations look pretty professional to me, and he claims to have watched an actual intercept going on while he happened to be there.
Here is an article that describes the Indonesian Air Force detaining an American aircraft that had strayed into its airspace without the proper clearance.
https://www.thejakartapost.com/news/2013/05/21/us-transport-aircraft-forced-down-aceh.html
And even Hishammuddin himself does not deny that the MRAF has the capability to intercept what they call “suspect” aircraft. He just claims that no fighters were scrambled–not that they did not have the capability to scramble fighters. I see Ben Sandilands has an article describing Malaysia’s intercept capability. It seems the only one’s who doubt that capability are contributors to this blog. I don’t understand it.
MRAF air defense would have been aware of the “bogey” at about 17:30. They would have watched it in real time as it crossed Thai territory, and then definitively entered Malaysia airspace at approximately 17:40. At that point, the order to scramble jets at Butterworth would have, could have, should have been given. 15 minutes to wheels up is reasonable; that would have the fighter(s) in the air at about 17:55. I estimated maybe 17:56 based on back tracking from the 18:07 anomalous radar position at 570 kts. So that works out about right.
As for the CNN story, yes, the 8AM timing is way off. But there were a lot of 8’s floating around that day: it was March 8, MH370 passed Penang about 18:00. Maybe someone had a thick accent, or a translator made a mistake, or someone typing an email made a typo and wrote 8:00 instead of 18:00. Yes, I am reaching here.
But what is odd about the story is the claim that CNN “reported that aircraft were scrambled BEFORE authorities could corroborate data indicating the Boeing 777 turned westwards from its northbound flight path.” By 8AM that morning, they knew full well that the aircraft had turned westwards from IGARI. However, at 17:30, MRAF air defense would have no clue what the bogey was. In fact, they would have no way to know at first unless there was an intercept. Let’s say it happened, for the sake of the argument: it probably would have happened at about 18:22 or shortly thereafter, and the engagement would probably have to be broken off somewhat before the hypothesized FMT at 18:40
Once the fighters identified the bogey, I can imagine there would have been a phone call to Malaysia Air that went something like, “Hey man, do you guys know one of your aircraft with tail number 9M-MRO is flying up the Malacca Strait with its transponder turned off”? That in turn would have prompted MA to try the satellite phone thus possibly explaining the 18:40 timing. It sure was a lucky coincidence that the call happened right at the FMT; otherwise, how would we have known about it?
The fighter idea connects a lot of dots that were previously unconnected. I am sure what practical significance it may have–so who cares? is a valid response–but to dismiss it out of hand seems premature at the least.
@Andrew
Thank you for the practical knowledge of TCAS. It does not change the circumstance that even if the MH370 showed on a display, the icon would have not identification with a specific flight. Thus, being detected is of no significance, particular if MH370 can avoid a conflict situation.
@Warren PLatts
The apparent coincidence of the phone call with the FMT is a valid topic for inclusion in scenarios; however, the turn south at that time was deduced first and then later noted to be coincidental with the phone call. It helped to explain the BFO at 18:40.
My recollection is that the turn time and approximate location was originally deduced by the intersection of the N571 airway and the back projection of the post- 19:41 -track. In effect the time and location of the FMT were deduced without recourse to the BFO at 18:40.
Only subsequently, when the sensitivity of the BFO to ROC was better appreciated was there any discussion of altitude changes as a component of the 18:41 BFO.
All of this is by way of context.
Re:TCAS/Captio
MH370-Captio path proposal says putting on TCAS is a possibility after 1825. Not saying probable, just a possible option.
According to the Captio team, maximum altitude on flight path B466 is FL270, so MH370 might have ascended to say FL275 to fly over B466, or alternately if TCAS was on, then MH370 could cross B466 at a lower altitude.
I am not currently buying Captio’s Xmas end point, but I just think they did a really good job on their Andamans flight path analysis.
@TBill
Why, if the TCAS is on, would one choose anything but a FL having the best fuel efficiency, or the easiest to fly? The probability of an identified conflict is low to begin with and the display gives plenty of time to change the altitude by several thousand feet so as to avoid causing an alert.
As for the Xmas end point, I recall that it suffers from the defect that some of the speed and altitude changes are associated with ping times or arbitrary map boundary crossings where there is no longer a possibility of the action being observed. Also, it is odd that the fuel was managed so poorly.
If memory serves, the dynamic computer graphic provided by CAPTIO showed a potential conflict with a plane going in the reverse direction on N571 near IGOGU. But a major descent would not be needed to clear this hurdle.
@Sid Bennett:
thanks. I had been wondering how it is possible to experience -3.5 g despite (almost) constant altitude.
But I guess that’s because that lasted only for ~2s. I had not seen the time scale before:
https://avherald.com/img/emirates_a388_a6-eul_arabian_sea_170107_3.jpg
@Sid
I am not the expert, but the Captio team was trying to infer ICAO/professional pilot protocol for crossing B466. As I understand it, Captio are saying it would probably be to fly above FL270 over B466 or use TCAS below FL270.
@Sid Bennett asked: Why, if the TCAS is on, would one choose anything but a FL having the best fuel efficiency, or the easiest to fly?
It might have been part of a misdirection of a flight to the northwest, and then below radar coverage, a trajectory change towards the SIO, followed by a climb and cruise when again out of radar coverage.
@TBill
Yes, they do approach it from an ATC perspective. But, no matter what you call it, the diversion of MH370 was not in accordance with professional pilot protocol. Neither was turning off the TCAS for a while; nor was turning off the electrical power for most uses, or the presumed depressurization of the plane.
If the objective was to turn South without an in-air collusion, a significant descent is not needed.
……A separate question. I am presuming (bad idea,that…)that the military radars do not normally interrogate the civilian aircraft transponders. Are some of them capable of doing so?
Hi,
@Warren Platts about Butterworth.
In a French documentary (12th january 2017 “Envoyé Spécial: MH-370 aller simple pour l’inconnu” from Antenne 2 TV, a public network), there is an interview of a guy presented as Major Zaidi (supposed from Malaysian Airforce, perhaps retired). Extracted and translated by me:
– Voice over: For Major Zaïdi, the answer is of a despairing simplicity.
– Major Zaïdi: In peacetime, everyone goes home in the evening. We need up to two hours to react. All the pilots go home. There is no longer a single team.
– Journalist: You mean it’s a big mistake of the army?
– MZ: Of course! It’s a big shit. A failure of the hierarchy. Now we pay the price. Our government should have drawn conclusions but no one has resigned. This is Malaysia. That’s all.
– Voice over: Inability to respond? Decision not to take off? Meanwhile, the Malaysians did leave the MH370 spin them between the fingers. Despite our many requests, the Minister of Defense refused to answer our questions.
It is (in French) on U-Tube:
https://www.youtube.com/watch?v=2My_WCy9HAE
at time 25:30 sur 54:24.
Regards,
PL
@Sid
Long range air defence radars & SSR (& IFF interrogators).
Yes, such radars perform SSR interrogations. The C² system, integrating the various remote LR ADS radar heads, correlates the SSR data with assigned civil ATC squawk codes & flight plan data to identify a/c as ‘friendly’ (or not).
@Victor
you posted:
Nobody (at least nobody actively contributing to this blog) is claiming that the increasingly steep descent (downward acceleration of 0.67g) implied by the final BFO values could have not have been followed by a gentle pull-up and then a long glide, ending in a steep descent and crash. That scenario has very much been left at the table. The questions that we ask ourselves are why was it possible done, and is there a high probability it was done.
Not a lot of takers on this bait. There is not shred of evidence to support it much less any plausible reason for why it might have been done. Andrew pretty much tossed a loss of control at flameout possibility in the trash.
@Dennis,
The bait was cast (with hook) long ago. No nibbles were felt on the line.
The idea I floated way back was this.
At fuel exhaustion, any active pilot knows he is not going much further, except down. There was cloud. He was at FL350 (assumed). It was twilight / dawn breaking.
His priority would be to get visual, to see any vessel running lights, and to see the sea, (when lower) to assess swell etc (assuming intent to ditch). Thus, he needed to get below cloud base.
Normally, many would argue, that logically, he could just simply glide on, until he finally popped out. But that is not smart. The layer could be thousands of feet thick, and that may take some time, and if there was a ship close when he did pop out, (possibly then very low), he may be seen, and have little altitude to get very far away from it. “Vanishing” fails.
A much smarter approach, is to take advantage of any cloud “hole”.
Dive down through it, get visual with energy, recover, scan, then decide.
DennisW said:
October 16, 2019 at 10:24 pm
@Victor
you posted : [October 15, 2019 at 2:12 pm]
Nobody (at least nobody actively contributing to this blog) is claiming that the increasingly steep descent (downward acceleration of 0.67g) implied by the final BFO values could have not have been followed by a gentle pull-up and then a long glide, ending in a steep descent and crash. That scenario has very much been left at the table. The questions that we ask ourselves are why was it possible done, and is there a high probability it was done.
and Dennis also said:
Not a lot of takers on this bait. There is not shred of evidence to support it much less any plausible reason for why it might have been done. Andrew pretty much tossed a loss of control at flameout possibility in the trash.
Sid Bennett said:
October 14, 2019 at 12:16 pm
The thread has veered from its course, IMHO, where we continued to study and discuss the “objective” evidence of the flight path of MH370.
And Sid followed with: Unless a hypothesis being proposed is tied to a sufficient quantity of data, I cannot see that it contributes to the discussion. And here for the purpose of completeness, he qualified that with: (This criticism does not extend to the technical analysis of a possible scramble and intercept range.)
Dennis,
Victor,
Sid,
All,
The last flight of 9M-MRO as MH370 may be broken down into stages:
Stage 1: The seemingly normal flight until contact was lost;
Stage 2: The flight to, around, and from AGARI generally west-south-west and across the Malaysian Peninsular until in the region of Penang;
Stage 3: Flight from the region of Penang in a generally west-north-west direction ‘up’ the Strait of Malacca until finally making a turn to a generally southward direction;
Stage 4: Southward flight until fuel extinction;
Stage 5: Descent to the ocean, which stage itself can be broken down into stages.
If the aim of this analysis is to determine if there is sufficient evidence to point to a probable region or regions of interest for another search and to limit that region or those regions to a workable size, then weeding evidence from all those “postulations”, “theories”, “conspirational considerations” or just pure speculations is extremely necessary. In other words it is necessary to distinguish evidence from speculation.
Sid Bennet earlier said: “It is necessary to postulate a plausible pre-FMT and pre-ISBIX locale route if the later flight segments are to be validated.”, and he said that later flight segments are much more significantly constrained when a condition of plausibility is imposed on the earlier path. [October 8, 2019 at 11:28 am]
This reliance on a degree of plausible postulation is unfortunate. But, if essential, then “we” must do our best to limit that plausible postulation to the bare minimum, EVEN IF THE RESULT IS THAT a number of regions of interest require consideration, and not just a single location, OR THAT one or more of those regions of interest are clearly of unworkable size.
Whether or not the aircraft was shadowed by fighters of any nation, or by little green men, has no relevance to the aim of the analysis UNLESS there is evidence that the shadowing, or intercept, or interference by those fighters or those hypothetical little green men actually affected the person or persons still active in the cockpit of 9M-MRO and thus affected the subsequent flight path and fuel consumption of 9M-MRO.
And, as far as I have seen, there is no such evidence.
Similarly, extolling various ideas as to the reasons why the diversion of the aircraft from its planned flightpath and the various ideas as to who created that diversion probably add little value to the analysis, although guestimating who remained in control of the aircraft may aid in guestimating how the aircraft may have been flown.
EVEN THIS latter may be problematic, in that consideration of how that person was thinking, or those persons were thinking, really extends into the unknown.
_____________________________________________
For some considerable time it has bashed (or I have bashed) my brain just how Stage 5 of the flight progressed.
I have considered drawing various inverted cones to describe the potential various stages of that descent of the aircraft, only to realise for the earliest sub-stages of Stage 5 a conical representation may not provide the best image.
_____________________________________________
For Stage 1: We have a considerable amount of evidence, even to the fuel remaining at the last ACARS report.
For Stage 2: We have some radar evidence that the aircraft took the path described above and some more precise information.
For Stage 3: We have some more radar information and some satellite communication information, even if only limited to “metadata” concerning attempted link-ups. We also have evidence (or “we” can surmise) that electrical power was restored in the aircraft, to some degree.
For Stage 4, the information available is only data from satellite communication “metadata”. That and prevailing weather data has been used in constrainment of possible flightpaths.
_____________________________________________
For this post, I will start Stage 5 at the moment of first main engine fuel extinction.
Stage 5.1a: It is my suspicion that there was no active human involvement at this stage, although there is NO EVIDENCE upon which to back-up my suspicion. If this was the case:
i:- the aircraft would continue on course losing altitude to maintain speed until the second main engine flamed out, or;
ii:- the aircraft would descend until the single engine could maintain altitude at the selected speed, or selected speed mode, and then continue on course until the second main engine flamed out.
Stage 5.1b: I, again, make another assumption. That is even if there remained active human participation within the cockpit, the flight path would most likely be the same as for Stage 5.1a.
Stage 5.1.c: Here I recognise Ventus 45 and his comment 25628 above on October 17, 2019 at 12:08 am. If there was still active human participation in the cockpit intent on “His priority would be to get visual, to see any vessel running lights”, etc, in order to maximise chances of not being seen, however remote the possibility, THEN I would make my controlled decent to below cloud level whilst I had some remnant engine power. Regardless, subjectively, I consider this unlikely. Again, for this (my) subjective conclusion there is NO evidence. Here, please correct me if I am wrong.
Stage 5.2: Second main engine fuel extinction.
Stage 5.2a: If there was no active human involvement upon second main engine fuel extinction then there is satellite communication “metadata” indicating that the aircraft eventually went into a rapid descent. This is evidence. Also there has been evidence gathered by simulation testing that this would be conversion from unidirectional flight to a (likely eventually rapid) spiral.
i:- In this circumstance the aircraft MAY be close to where there was the last satellite communication.
ii:- Consideration should be given to the possibility that the aircraft began to break up. Perhaps, during high speed descent, the wing broke off outboard of the engine thus releasing the flaperon already damaged by flutter and causing break-away of part of the flap also already damaged by flutter. If so the subsequent descent profile of the main part of the aircraft may change from the descent prior to break-up ? The spiral may have a different characteristic. The finding of these two pieces of material evidence may have some weight concerning the final possible final descent and entry into the ocean.
Stage 5.2b: If there remained active human participation in the cockpit, then may I be presumptuous and offer that “all bets are off”. See, c, d and e, below.
Stage 5.2c: If there was active human participation in the cockpit, there is one possible extreme action that might be understandable. Seeing that descent and demise was so close the occupant may now decide to “end it all quickly”. Result: Small likely diversion from the last satellite communication. You will now see that I am making another assumption: that of now a sole occupant.
Stage 5.2d: Alternatively the active human participation in the cockpit might try his best to stretch out his life as long as possible and savour the last withering moments. In this extreme the entry of the aircraft into the ocean may be a considerable distance from the position of last satellite communication.
i:- In this circumstance it may make sense to continue along the same course as he had been flying for the last few hours. I can see no reason at all to change course. In this consideration, there may be an argument to limit a search region of interest which would be otherwise unworkable. NOTE: But by this point in time it would seem likely that all sensibility and reason had flown “out the window” hours prior.
ii:- Of course, someone may suggest that there might have been an arranged liaison with a surface vessel and the human occupant or occupants in the cockpit would have controlled the descent to arrive at the actual vessel location. This diversion (getting off-track) from the aim of the analysis belongs along with discussion of fighter involvement and little green men, UNLESS there is any evidence.
Victor:
Stage 5.2e: There is actually one situation where it might be understandable that the aircraft started a spiral descent and then partway on the way down towards the surface of the ocean the aircraft was returned to a more gradual descent rate, and thus began to travel a significant distance from the position of last satellite communication. Unfortunately, in this particular instance, there would seem no particular direction likely. What if the increased noise of a high speed descent caused a slumbering human occupant to wake up or come to, and then try his best to stretch out his life as long as possible and savour the last withering moments.
As far as I see there is no evidence for or against this.
AND, finally, you may note notice that, above, there is no mention of a “controlled ditching”. (Other than might be inferred by the nonsensical hypothetical liaison per Stage 5.2d ii.)
Any thoughts of a controlled ditching belong with the rest.
@George G,
RE: 5.2 d (ii)
The same low cost East European Private Military Companies (PMC) that offer the services of In-flight Security Officers (IFSO) also offer security guards for shipping to protect against piracy in the Indian Ocean. It’s not a stretch to assume that a controlled ditching and liaison was arranged by the pilot in the Indian Ocean.
Sid wrote: “My recollection is that the turn time and approximate location was originally deduced by the intersection of the N571 airway and the back projection of the post- 19:41 -track. In effect the time and location of the FMT were deduced without recourse to the BFO at 18:40.”
That is what I have always suspected: that the rough location was simply a dead reckoning plot along N571. Thus, there is nothing that definitively rules out a turn down P627 with an FMT in the vicinity of POVUS. The practical effect of such a turn would be to extend the flight for perhaps another hundred miles, allowing a 7th arc crossing a degree or two further south than fuel projections would otherwise allow.
Also, is it not the case that the 18:40 phone call caused the 18:40 BFO? That is, if there had been no 18:40 phone call, there would have been no 18:40 BFO, and hence no other direct evidence of a FMT at precisely 18:40. If so, that is a lucky coincidence!
@George G: I meant to write “I am NOT sure what practical significance it may have had” if there was a brief intercept by fighters or little green men from perhaps 18:22 lasting perhaps ten or fifteen minutes. On the other hand, such an encounter might have prompted maneuvers that would have cost fuel, thus limiting the ultimate range of the flight.
@Don
Thanks. I had suspected that, else the military radars would have a tough time sorting the traffic. So, the identification of the 18:22 radar detection with the flight was most likely due to a transponder being turned on prematurely :-). This could either indicate that the TCAS was momentarily enabled approaching waypoints or the aircraft being at extreme range. (One assumes then, that the radar track that was disclosed at Beijing, but no officially might no have had transponder data at all times.) If the TCAS was being turned on only where there would be a higher likelihood of conflicting paths, it could be turned on again near IGOGU, and there is no reported radar coverage at that location. Same again at BEDAX if that is on your favored path.
@George G
For such a long post, I need to praise it as it does not qualify as a “rant”.
I submit that most of us would agree that, pending fuel analysis and clarifying a few important details, there are three proposed paths to the 7th arc derived primarily from the Inmarsat data:
NILAM-IGOGU-BEDAX-ISBIX (180T)
NILAM-IGOGU-ISBIX (186T) (by the way, a path via SAMAK vice IGOGU works also)
NILAM-POVUS-ISBIX (189T)
I will qualify this by saying that only the 186T path has, so far, been shown to be consistent with the BFO/BTO data near NILAM. It does require the offset path.
We accepted the data near NILAM previously as sufficiently understood to support the offset path scenario. At least we need to understand whether the other main paths can be shown to be consistent with that data also. I am not sure that that alone is determinative, but it is a useful thing to get out of the way.
Richard stated that the path via AEGEA has been eliminated, but we still don’t really have a quantitative of the situation. The 180T path requires a descent at 18:40. The others do not.
As to stage 5 of the flight, I keep coming back to a dive-glide primarily to keep it on the table, since it is physically plausible and is not contradicted by the Inmarsat data. The state of human control of the plane at that time seems likely to remain in doubt until the black box is recovered. So, when defining a search area, glide-dive needs to be incorporated in the plan.
If a fuel analysis is performed, we should be careful to compare like with like. If step climbs save fuel, the each path should have them. If large descents and flying at low altitudes and speeds are needed for timing purposes, they should be included in the fuel analysis for that path.
One way to do this is use the waypoint scenarios as the baseline paths and to seek the best range for each path and then to adjust the results for any postulated slight deviations from the path.
@Warren Platts
Indeed, there is no data between about NILAM and IGOGU. However the offset postulated at NILAM has been used to explain the BFO/BTO data. Victor, I believe, posted a detained analysis of this aspect some years ago. That is why I ask for a similar rationalization of the same data for other proposed paths.
@Sid: re: the right offset. That is one problem with the P627 hypothesis: to hit that first arc at the right time, there either must be a drastic slowdown, or a hooking modified “split-S” or perhaps a spiral, looping dive to the right. Presumably the latter maneuvers would be undertaken to get below radar (or evade hypothetical F/A-18Ds) and could possibly be consistent with the BFOs.
@Sid wrote “So, the identification of the 18:22 radar detection with the flight was most likely due to a transponder being turned on prematurely :-).”
I disagree.
An active transponder would have been picked up by Indonesia’s civil SSR antenna and ADS-B receiver at Gunung Linteung, near to Iskandar Muda Airport/Banda Aceh. Also, DCA-MY’s civil SSR at Langkawi and Aerothai’s SSR at Phuket.
@Don
Are those data available and have they been searched?
@all
Not a casual read, but an interesting and fresh approach.
Peter Large is a work colleague from a previous life, and a very good friend.
https://pqdtopen.proquest.com/doc/2303836555.html?FMT=AI
OK, I’m still looking into this fighter jet rumor.
As for capability, I see Indonesia certainly has intercept capability, and are in fact very aggressive in defending their airspace. Here is an article about a Swiss pilot forced down by fighters, and I found another article where an Australian pilot was forced down in 2014:
http://malaysiaflipflop.blogspot.com/2014/04/indonesian-fighter-jet-alert-at-first.html
So we know why the aircraft flew around Indonesia at least.
As for Malaysia itself, I was reading in the comments section of that “SeaDemon” guy who claimed to be former MRAF where he said that fighters could be scrambled within 3 minutes of receiving the order. Now, that is obviously hard to believe, as that would require pilots to be literally sitting in the cockpits, but in my reading if 2-3 minutes is the minimum time, 15 minutes is toward slow end of times. So I think it could be likely that Butterworth did in fact have alert capability.
If so, fighters were either scrambled, and then this fact was covered up, or the fighters were not scrambled. If not, for the official explanation to be true–that the blip was a “friendly”–they would have had to have known that the blip was in fact MH370. This is the explanation “SeaDemon” gave: that even if the transponder was turned off, the primary radar (or at least the enhanced Inmarsat system) would have continued to earmark the blip as MH370. If so, then the decision not to scramble aircraft makes sense: commercial aircraft turn back for all sorts of reasons like mechanical issues or bad weather.
But my understanding of the radar data, by the time the aircraft was past IGARI, that was beyond primary radar coverage. The best the system would be able to do would be a dead reckoning extrapolation. Thus, when the aircraft came back on primary radar coverage, there would be little reason to suspect that it was MH370. In that case the “blip” would be marked as “Suspect” on their primary radar, and their job would then be to determine whether it was a friend or foe. In that case, fighters should have been scrambled.
Thus, if that is correct, and Malaysia did in fact have quick alert capability, then fighters were in fact scrambled, and Hishammuddin and company have covered it up.
This would of course explain the 18:07 anomalous blip.
I get it that the consensus view here is that there were no fighters scrambled that morning, but then what exactly is the consensus explanation for the anomalous blip if that was not another aircraft? Honest question.
I had always chalked it up to an error in the estimated bearing–when I was in the Navy, if you got caught plotting a fix using a radar bearing you would get yelled at as a minimum. (Distances were OK to use.) But that was before I knew that blip was two minutes out of sync with the rest of the blips.
Also, I have managed to track down the original source for the CNN story that started the fighter jet rumor. Here is Nic Robertson’s first report as transcribed by me:
And we also understand that after Malay…–after the Malaysian Air Force heard from Malaysian Airlines that, uh, Flight Three Seven Zero had gone missing, they put in the air what they’re calling “search aircraft,” um, according to one source–another source said they were jets–but “search aircraft” put in the air to, to see what they could find as a precautionary measure. This, uh, some days before the military was actually able to determine the full extent of what they could discover on their radar.
https://www.cnn.com/videos/world/2014/04/10/newday-robertson-malaysia-plane-altitude.cnn
Note there is no mention of “8AM”, but there is a special mention of “jets” and Robertson suggest that apparently at the time, the MRAF did not in fact know what was was causing the radar blips, and that the “jets” were sent as a “precautionary measure.”
Now, I am no expert in SAR operations, but when I think of SAR aircraft I think of either helicopters or slow-flying propeller driven airplanes–not jets. Moreover, if they didn’t know their blips were MH370, then fighter jets would normally be scrambled in order to indentify the aircraft as “a precautionary measure.”
Then the story comes out in the print edition. Here is the relevant part:
• Malaysian air force search aircraft were scrambled about 8 a.m. March 8 to the South China Sea and the Strait of Malacca, soon after Malaysia Airlines reported that its plane was missing, Malaysian sources told CNN. The aircraft took off before authorities corroborated data indicating that the plane turned back westward, a senior Malaysian government official told CNN.
• But the air force did not inform the Department of Civil Aviation or search and rescue operations until three days later, March 11, a source involved in the investigation told CNN.
https://web.archive.org/web/20140410182701/http://www.cnn.com/2014/04/10/world/asia/malaysia-airlines-plane/index.html?hpt=hp_t1
Now we have the “8AM”. What it looks like tbqh is that is an extrapolation on the part of the writer: MAS publically announced at about 8AM that MH370 was lost around 8AM, so the writer apparently assumed that’s how MRAF found out about MH370. But we know MAS knew about the missing aircraft by 18:40 UTC at the latest. And we know that MRAF tracked on radar an apparently aircraft earlier that morning.
The new bit of information is that the CDA was not informed of the “search aircraft” “jets” until March 11.
Now why is that significant? If MRAF was “scrambling” “search aircraft” at 8AM local that morning wtf cares? That is what they were supposed to be doing, and how could everyone else not know about it until 3 days later? At that point, Malaysia would be like an anthill that had just been kicked.
Nor is the case that MRAF SAR operations were a big secret. Consider what Hishammuddin himself has admitted to:
“If you’re not going to shoot it down, what’s the point of sending it (a fighter) up?” Hishammuddin asked.
He said had the Boeing 777 been shot down with 239 passengers and crew on board, “I’d be in a worse position, probably.”
Delays in confirming the flight’s change of direction led to several days of wasted searching for wreckage in the South China Sea along the airliner’s original course, before an analysis of satellite data identified the southern Indian Ocean as a more likely crash site.
Hishammudin previously defended the military’s inaction in pursuing the plane for identification after a preliminary report on its disappearance was released early this month [May 2014].
On that occasion, he said he was informed of the military radar detection two hours later and relayed it to Malaysian Prime Minister Najib Razak, who immediately ordered a search in the Strait of Malacca.
https://www.cbc.ca/news/world/malaysia-airlines-mh370-defence-ministry-defends-not-sending-jet-1.2647197
That entails that Hishammuddin was woken up and notified around 4AM local time (20:00 UTC). By that time, everyone of signficance but the NOK knew what was going on. MAS knew at least by 18:40, MRAF was riled up, and by 19:40, MAS had issued a “red alert” that full emergency SAR procedures needed to be implemented. Assuming it would take an hour or two for real SAR “search aircraft” to get scrambled, then they would have been in the air by about 21:00 to 22:00–6AM local time at about the latest.
So what’s the big deal? Answer: these aircraft probably were not jets, and were probably not a big secret. Hence Nic Robertson’s puzzlement the next day when he was wondering in his next report what exactly the MRAF chief was pushing back on when they denied the CNN report.
But a fighter jet mission would be a secret, and if they wanted it kept secret, then they would have to deny the rumors that “jets” were “scrambled”…
Bottom line: it is definitely a case of “methinks thou dost protest too much.”
And here is a list of the “jets” in the MRAF:
Sukhoi Su-30
Mikoyan MiG-29
Boeing F/A-18 Hornet
BAE Hawk
Aermacchi MB-339
All are fighters/attack aircraft (the MB-339 is a small jet trainer).
The fixed wing aircraft that might be useful for SAR operations are several C-130H Hercules, CASA CN-235, and Airbus A400M Atlases, and perhaps some
Pilatus PC-7s and a couple of Beechcraft Super King Air trainers.
Consequently, we can see what Hishammuddin was pushing back against: the rumor that “jets” were scrambled because that entails that fighter jets were scrambled–they are the only jets possessed by MRAF. So is more credible? Nic Robertson’s senior sources who first leaked the turnback from IGARI, or Hishammuddin??
@Warren Platts
If you are going to keep repeating your assertions, you might as well get the name correct. It’s ‘Royal Malaysian Air Force’ or RMAF, not ‘MRAF’.
The following articles might give you some idea of the RMAF’s ‘preparedness’, particularly in relation to its fleet of Russian fighters:
Only 4 out of 28 Su-30s and MiG-29s in RMAF can fly vs 100 F-15s and F-16s in RSAF
Only four out of 18 RMAF Su-30MKM fighters are able to fly
14 of M’sia air force’s 28 Russian jet fighters not airworthy: M’sia defence minister
@Warren Platts,
Don’t you think it’s much more probable that an ISR aircraft that was already in the air was tracking MH370, as opposed to fighter jets that were scrambled from off the ground?
@Andrew: The Russian fighters are in bad shape because they can’t get spare parts from Russia.
@Canis: There are no RMAF ISR aircraft. Therefore, the probability is zero–much lower than the probability of a scrambled F/A-18D.
@All: Honest question: What is the consensus explanation for the 18:07 anomalous radar blip?
@ Warren
The ISR aircraft in question could have been RSAF Gulfstream, or US Navy P-8, or RAAF Wedgetail.
Remember, Cope Tiger 2014 was about to start in Thailand.
Plus, many, including VI, have suggested that original military radar at IGARI appears to show 2 aircraft. One is MH370. The other could have been said ISR aircraft.
@Warren
The ISR aircraft in question could have been RSAF Gulfstream, or US Navy P-8, or even the new RAAF Wedgetail. It was meant to rendezvous with MH370 at IGARI. military radar data at the turnback at IGARI suggest the same.
@Canis: I knew this Indian guy on twitter who was convinced MH370 had crashed into this sinkhole in the middle of a Sumatran jungle. So I convinced him to go see for himself. By golly, at great personal expense and risk, he went. After disappearing from the internet for several days, he emerged from the jungle having found nothing. But of course he was not cured. Thus, I feel really bad: he could literally have been eaten by a tiger, yet no good was achieved.
@Warren … and your point is?
I seriously respect many of the people on this forum including our esteemed host because I have followed this story right from the beginning and recognize many of the people who have something worthwhile to say.
But from time to time we get random tourists who hop on the bandwagon but don’t hang around long enough to get at the truth. I hope you stay and find out.
It saddens me to report the passing of CapFranz. Whether you agreed with him or not on here, he was thoroughly and utterly dedicated to finding MH370. I’m sure the thoughts of everyone here are with his family.
Rest in peace, Cap. We will find her for you.
@Rob Moss
Sorry to hear about Capt Franz…had not heard that. Some of us have been trading MH370 Twitter comments rather recently.
@Warren Platts
Another Malaysian FI report radar plot with spurious points is the graphic over Kota Bhura which shows MH370 civil primary radar with some traces of other flights not totally removed. Everybody always asks what those points are. In that case, it seems to correlate with other commerical flights over KB which are depicted in Captio’s air traffic video.
As far as surviellance aircraft, we do know Singapore had an AWACS type aircraft monitoring the shipping lane traffic that nite, and mat have contributed (secret) info about MH370 presence or loack of presence in certian areas.
Sorry to sound harsh, but I don’t give the fighter interception angle much credence for the following reasons,
1. The reaction to the plane going missing was somewhat slow.
2. There is uncertainty over whether or not the military radar was manned / operating with opinion here tending towards not.
3. Uncertainty over whether or not QRA/QRF (whatever your preferred term) available that night ( and, I assume can’t be tasked without radar)
4. Why intercept a rogue aircraft heading away from your airspace.
5. Had an aircraft actually launched, would mention of the dispatched fighter have not needed to have been scrubbed from the ATC conversation logs?
I’m of the opinion that the perpetrator was confident no interception would be attempted.
It’s an interesting area of discussion, but is it worth the energy to explore if it’s unlikely.
@Tom: Your 1-4 are mere intuitions. The awareness of the disappearance was fairly quick tbqh, it was the response to this awareness that was SNAFU.
As for (5), if fighters were scrambled from Butterworth, why would that show up in ATC logs at PEN or KUL?
As for the energy to explore the theory, I have already expended it. The new information I have provided are:
(a) An F/A-18D launched shortly after MH370 rounded Penang and flying a subsonic military thrust could account for the 18:07 anomalous blip.
(b) Continuing at military thrust, the actual interception would occur around or very shortly after the 18:22 last known radar position.
(c) An F/A-18D then flying at optimal cruise and escorting MH370 would have to return to base at a little before the 18:40 “FMT”/phone call.
(d) At least one former RMAF journalist and one Malaysian MP have affirmed that Butterworth was on alert status and was fully capable of scrambling fighters on a timely basis on the night of March 8, 2014.
(e) At least one senior official whistleblower in the RMAF told Nic Robertson of CNN that “jets” were scrambled that morning.
(f) The only jets in the RMAF are fighter jets.
Make of that what you will.
Goodbye folks. I have many other research areas to attend to..
@Warren Platts.
To put any of the eight TUDM/RMAF F/A-18Ds into the frame one must to prove they were not deployed elsewhere. These Hornets, at various times, have been deployed to other TUDM/RMAF bases in peninsular and east Malaysia, to Singapore, and to RAAF bases in Australia.
Countering some points you referred/made above:
a) Existence of TUDM/RMAF air intercept capability prior to Mar 2014. A report detailing a media visit to Kuantan AB describes three instances where Mig-29N were employed to demonstrate air intercepts. The visitors were shown the display from the ‘top secret’ radar network. A similar demonstration was undertaken in May 2014. The gist of these events prior, and after, the loss of MH370 appears to be that the Mig-29N provides air intercept capability for TUDM.
b) Thanks to Pax Lamda for referencing Major Zaidi’s contribution to Olivier Sibillie’s documentary piece where Zaidi stated that RMAF/TUDM flying operations in 2014 were limited to daytime hours, Mon-Fri.
c) If any aircraft departed from Butterworth AB after 9M-MRO passed Penang Island its departure would have been very obviously tracked on the Butterworth terminal area radar. The short answer: the WMKB radar logs showed no plots/tracks of aircraft departing Butterworth.
d) Indonesia’s performance in ‘air intercepts/force downs’. Indonesia has publicised a number of events involving ‘forced landings’ of aircraft entering its airspace, including a USAF Wolfhound at Banda Aceh, a Swearingen SX300 at Medan, and more recently an Ethiopian Airlines A330 freighter. It’s most likely that each of these cases involved incomplete flight planning without permission to overfly Indonesia airspace, absence of payment of overflight fees, and the errant aircraft were detected by means of normal SSR interrogations. It is normal practice that ad-hoc operations should be notified well in advance.
e) The 1807UTC plot. No altitude data provided. Perhaps a spurious return from a large ship, an oil rig under tow? A weather balloon? A dozen other possible origins that, with a modicum of effort, could be reliably substantiated.
Good luck with your other research areas.
Standing in line to get my flu shot. Most of my friends are anti-vaxxers.
My doctor does not want his patients to have the flu shot under any circumstances despite the loss of revenue from this approach.
@Andrew, all. Some time ago you will recall I assessed the likelihood of vapour lock preventing the APU powering the SDU for the final transmissions. Were that the case, which I found likely, another cause for those transmissions would be needed, the most obvious being that instead they resulted from a pilot’s selections.
However fuel vapour lock data on which I based that was in error, so I have revisited that assessment.
The below analyses how the aircraft could reach the Holland descent rates and vertical acceleration from various speeds and a couple of heights, supposing that during that and the preceding dive which, it transpires, will be short, the aircraft had no substantial bank. I think the analysis does give some feel for the various influences and interplay generally despite this limitation, while being more directly relevant to whether, if piloted, APU powered final transmissions would be likely, or there would need to be another source of those.
I find that vapour lock probability is less than previously but is likely still in these scenarios, that risk reducing with decreased altitude and decreased speed. The risk also decreases with increased vertical acceleration, being highest in any nose drop before the dive. Those findings do depend on some assumptions and require some judgements so are more representative than definitive but I think the exercise may be of interest all the same. That is why I post it rather than just its outcome.
Opening the below using the Dropbox top right button makes it clearer.
https://www.dropbox.com/s/tvqcsikcllt2csr/vapour%20lock%20risk%20assessment%2C%20by%20David.docx?dl=0
Article about the UK AAIB of general interest.
Re the MH370 investigation, “Mark Ford, a senior inspector who specialises in extracting and analysing recorded data, was among the British contingent who flew to Australia to aid in the MH370 search, which went on for 21 months. While there are many theories about what happened, Australian investigators believe that the pilot, Zaharie Ahmad Shah, was unconscious before the airliner went down.”
The AAIB releases names of investigators of particular accidents, which may be unusual?
“Australian investigators believe…” Put like this it could be construed that Mr Ford does not endorse that view.
https://inews.co.uk/news/long-reads/air-accident-investigation-crash-shoreham-mh370-mh17-farnborough-aaib-817812
@David
Thanks for your comments re the likelihood of APU vapour lock.
@all in particular Victor, DrB, Richard
No reaction or comments on the Peter Large thesis? Did you understand it? Lots of private comments on the gut conclusions. Peter is a Brit, so you have to factor that liabilty into the equation.
@DennisW
I spent a large part of last Friday reading the first fifth of Peter Large’s thesis, and found it likely to provide a well researched background,
and still intend to continue, (but not tonight/morning my time)
Thank you for giving us a chance to see a slightly different approach.
@Dennis: I was traveling when you posted the link. I skimmed it on my phone in an airport between flights. I was impressed that a student had such a broad understanding of many of the aspects of the disappearance. I’m not sure how we can use the results to help narrow down the search area, but I admit that statement is only after a very precursory review. When I have some free time, I’ll dig in more. Unfortunately, it is very long, and takes a lot of time to properly understand it.
Since you have spent more time studying it, what do you think are the most relevant takeaways?
@Victor
Strong support for 34S.
Re:Peter Large
I have read most of the paper and need to read it at least one more time. It takes a graduate student to explore an arcane aspect of the problem in order to tease some information out of the noise.
Whether the result is more than of academic interest, at least it does not conflict with the general consensus. Whether it adds weight to it remains to be debated.
@Sid
Peter is not a typical student, He has had a long career in silicon valley tech. The PhD and the MBA before that reflect that he enjoys learning and the opportunities it brings.
Re Peter Large
I read through the paper quickly and was impressed with work that had gone into accumulating and assimilating all the complexities.
I was particularly interested in the new line of attack; the possibility of adding the AES antenna orientation to the BFO derived heading data and then trying to use the signal strengths as a discriminator. Unfortunately it seems that there are too many other variables to reach a conclusion, but the idea shows some promise.
@DennisW
Many thanks for sending through the paper from Peter Large on the Meta-Analysis of Geospatial Estimates in the Case of MH370. It took some time to absorb the 285 pages of this excellent paper. I am sure that I will continue to refer to the paper.
There are 3 major aspects to the paper, to which I will respond separately.
(1) The Meta-Analysis of 38 papers Peter selected.
An impressive examination of the history of our joint analysis. His findings where published in May 2019 and he did not have the benefit of seeing the current post and the previous post announcing and outlining the current joint project between Bobby, Victor and myself. He selected 8 papers from Ulich, Iannello and Godfrey as well as several other contributors to this forum including Anderson, Fah, GlobusMax, SK999, Nederland, Gilbert, Marchand et al., Kristensen, Rydberg, etc. Other contributors are quoted in the text, including yourself, BarryC, Exner, Thompson, etc. If you needed evidence of the importance of Victor’s blog, then here it is.
It is gratifying that Peter’s conclusion aligns with the MH370 End Point in the vicinity of 34°S, although he does not quite agree with a LNAV180 LRC FL390 flight path.
Peter extensively uses the MH371 data, but points out the time discrepancy between the satellite data and the ACARS data. Here, I feel he misses a trick, which I showed in a previous paper (not referenced) that it is possible to adjust the timings knowing the ACARS data to match the timings of the satellite data. This gives a richer data set for analysis.
Peter relies on the satellite data and drift data studies, but excludes to a large extent the fuel studies, weather data studies and surface search studies.
(2) The Spatial Characteristics of Antennas.
This idea was examined by the IG in 2015 and subsequently, in some depth. We rejected using the Rx Power (dBm), C/No and Estimated BER data to support the geospatial estimates.
At the time, Mike Exner, whose expertise in this field far exceeds mine stated: “I am confident the logged value is the C band down link power measured at the GES IF (50-90 MHz range). All the performance monitoring data in the log is from the GES (CUs). The input to the CUs is at IF 50-90 MHz. This includes the BFO, BTO, C/N, BER, and RX PWR. These are all C band related values measured by the CUs.”
“Adding to the complexity, the up-link TX Power is controlled in both directions to optimize overall system capacity. Thus, for a “bent pipe transponder”, the received power level may vary a few dB even when everything else is constant. Since BER is all they really worry about, it is the ratio of received power to noise power that needs to be controlled, not the absolute value of received power.”
“I feel confident the RX PWR values are measured at the IF frequency because that is the only place it is practical to make the measurement. These are CU measurements. That is where all of the demodulators I have designed make the measurement. I have never seen it done anywhere else. The absolute values recorded are typical of what one would expect at the IF level. They are way too high to be referenced to signals in space at the receive antenna, or even at the output of the antenna.”
“The I3F1 transponders are operated at a constant gain, adjustable by ground command over the long term as necessary to optimise for traffic and other considerations. However, in a linear SCPC transponder with fixed gain, it is still possible for the smaller carriers to be suppressed slightly if the total uplink power results in the C band power out reaching peak transponder power out –6 dB. In other words, the transponder starts to go nonlinear for output powers exceeding the Peak-6dB nominal operating point for a linear transponder.”
Mike may wish to comment further on the methodology and findings in Peter’s paper.
(3) Effect of GADSS on future occurrences.
It is good to know that it is relatively unlikely that there will be a similar event to MH370 and that GADSS will make that even less likely. Peter underlines the importance of finding MH370 and solving this mystery, so that the airline industry can learn from MH370 and help prevent a repetition.
In summary, when I look at Fig. 81, I know which of the two options I find more realistic and believable and am pleased that Peter agrees in his conclusion.
I recommend the paper as important reading for all contributors and MH370 analysts on this website.
@Richard
Thanks. I will pass your comments along.
In private discussions Peter clearly favors the ~34S terminus and a wider search width.
For those interested in the B737 MAX saga:
Boeing 737 MAX design, airline maintenance faulted in Lion Air crash
The report states that the Indonesian NTSC will publish its final report on Lion Air 610 at 2pm local time (0700 UTC) on Friday. The report should become available at the following website, under ‘Accident Reports’:
http://knkt.dephub.go.id/knkt/ntsc_aviation/aaic.htm
@DennisW
Given Peter’s preference for “wider” near 34S, it brings a possible final waypoint of DOBOK (on the old direct air route Perth to Harare) into play.
Other possibilities are OLPUS (on the old direct air route Perth to Johannesburg) or, EKUTA (on the old direct air route Perth to Cape Town).
One of the outstanding matters that has frustrated me, is not knowing precisely which version of routes and waypoints database was loaded in 9M-MRO, and it’s full contents.
@Ventus45
A navigation instruction, entered into the FMC to define or complete the FMT, may well have been as simple as ‘direct-to’ 99SP, S90EXXXXX, or S90WXXXX.
What is to gained by making it more complicated?
@ventus45, @Don Thompson: If the path crossed the 7th arc near 34S latitude, and the path was “straightish”, then the track was close to 180°T. That provides additional support for a direct south path with the South Pole selected as distant, unreachable waypoint.
Re Peter Large Thesis:
I am still reading the Large paper, but I can confirm my earlier analysis that there is no possibility of teasing out any useful path information from the receive power data and antenna patterns.
ADUWATI BINTI SALI discussed this possibility on TV back in March 2017. I corresponded with her in an attempt to explain why the idea had no merit. Some of that correspondence follows:
===========
Thank you for responding. Unfortunately, the inbound signal strength recorded at the Perth GES cannot provide any useful information about the location or path of MH370. The effective “range signal” to “range noise” ratio is far too low to pull any useful signal from the noise.
As I’m sure you know, the propagation loss varies with range according to the inverse square of the range. In dB, the loss between isotropic antennas is = -37 – 20*log(f) -20*log(d) where f=frequency in MHz and d= range in miles. The distance from the I3-F1 satellite to the sub-satellite point (90º AES elevation angle) is 22,236 miles. The distance from the I3-F1 satellite to the horizon (0º AES elevation angle) is 25,898 miles. Thus, over the entire “full disk coverage” of the I3-F1 global beam, the range only changes from 22,236 miles to 25,898 miles. Assuming a “perfect world” with no other sources of change to the signal strength, the signal strength would change only 20*log(22,236/25,898)= -1.32 dB over the complete global area of coverage. Of course, we know that the AES elevation angle only varied from ~40º to 55º, so the change in signal strength (between ideal isotropic L band antennas) was only a few tenths of a dB for the entire flight. Meanwhile, the normal variability in signal strength due to the AES antenna pattern, the variable EIRP control, transponder loading, etc. causes the receive signal level recorded by the CUs in Perth to vary by 5-8 dB under normal conditions. These are the sources of the variability observed.
The bottom line is that the variation in signal strength recorded (and noted in the Inmarsat October 2014 JON paper) was due almost entirely to changes in AES antenna gain as a function of pointing direction, AES uplink EIRP setting, transponder loading, etc., and not due to range changes. Thus, no useful information can be squeezed from the amplitude data. If you have any questions, please let me know.
Regards, Mike
=========
Dear DR Aduwati Sali:
Unfortunately, for the reasons I gave below [above in this post], it is impossible to use signal strength data to calculate the range from the I3-F1 satellite to 9M-MRO. The sensitivity of the measurement is extremely low, and the noise level is 10^8 higher than the “range signal”. Thus, the signal is buried deep in the noise.
We know from the BTO data and basic physics that the range between the I3-F1 satellite and 9M-MRO varied between 22,832.7 miles and 23,526.5 miles. The average range was 23,179.6 miles. At this range and elevation angle, the sensitivity is 0.00026 dB/mile. The change in signal strength (due to range change) between the extremes over the whole flight was only 20*log(23,526.5/22,832.7) = 0.26 dB.
The noise is many orders of magnitude greater. As previously noted, the L band uplink EIRP is controlled by the system in 0.5 dB steps. It can vary several dB over a flight. The L band antennas on each end of the link have pattern ripple of several dB. Transponder loading varies over the flight. These and a dozen other link variables contribute 5-8 dB of variation in the receive signal strength for a constant range. Thus, it is impossible to “see” the 0.00026 dB/mile “range signal” against 5-8 dB in background “range noise”.
Rain attenuation is virtually zero at L band and only a few tenths of a dB at C band in strong rain. Perth was dry, so no C band variation over the time of the flight. 9M-MRO was above the boundary layer for the whole flight. Thus neither link suffered from any material rain attenuation. More importantly, even if one or both links did have some rain attenuation, that would only add to the noise, not provide any additional signal of use.
I hope this explanation will put the issue to rest. Please confirm. If you have further questions, please let me know.
Regards, Mike
After reading more of the detail in Peter Large’s paper, it appears that he is trying to exploit the GES received power for a different purpose than ADUWATI BINTI SALI. Instead of trying to determine the range (impossible for the reasons given above), he tries to exploit changes in the received power to infer changes in direction of flight. The basic idea is to assume that all (most) of the changes in receive power are attributable to changes in the relative AES antenna pointing angle. The variation in uplink EIRP as a function of pointing angle alone is OTOO 5 dB, a much larger range than the variation due to range changes (~.2 dB). However, we know the other terms in the link analysis also have significant variability, so I don’t think this analysis holds up, except possibly over very short time spans when it is more likely that the other link terms remain nearly constant. I’ll try to contact Peter to discuss.
@ALSM
I generally share your view about extracting heading help from the AES received power. Not a lot signal in the noise and other factors affecting the measurement. However, in a “Kalman sense” some information is there, but the weighting is probably close to negligible.
@ALSM
Mike, you quoted the variation in uplink EIRP as a function of pointing angle as in the order of 5db. That variation is correct as measured through the pointing range ±75º (theta angle) off ‘normal’.
The mounting of the apertures orients their ‘normal’ to about 45º off fuselage vertical. Constraining the pointing range to +45º (at which point the other aperture is selected) and -60º (allowing for 15º roll at cruise) reduces the variation in gain to only 3db (per Ball Aerospace plots).
The GES log for the MH371 flight records 9M-MRO’s transmissions during its climb-out from ZBAA which involved a northerly departure followed by a turn to the south. The log records might provide sufficient data to test that hypothesis. The OOOI ‘OFF’ message, the IFE ‘OFF report’, the ACMS engine report for take-off, the ACMS engine report for climb, together with the first consolidated FMS progress report should allow the path to be reconstructed over the initial 30 minutes of departure, the look angle to either satellite per Log On, and correlate BFO and RxPwr metadata.
@Don, @Mike
I have looked at the MH371 ACARS data for the departure from Beijing.
At 01:38:58 UTC, MH371 was on a north-west heading of -36.0°T (324.0°T).
At 01:43:58 UTC, MH371 was on a south-west heading of -129.4°T (230.6°T).
https://www.dropbox.com/s/sr7n6hnvqtl250q/MH371%20ACARS.png?dl=0
Selecting all the 31 data points from the IOR Satellite Channel Unit 8 from 01:20:09 UTC to 01:55:24 UTC the correlation between RX Power and BFO is low at 0.2158.
https://www.dropbox.com/s/f9y38fevu4gg9ky/MH371%20CU8%20Rx%20Power%20vs%20BFO.png?dl=0
Selecting only the 11 data points from the IOR Satellite Channel Unit 8 from 01:38:18 UTC to 01:40:50 UTC the correlation between RX Power and BFO is high at 0.9373.
https://www.dropbox.com/s/dl1hiaed8r711qg/MH371%20CU8%20Rx%20Power%20vs%20BFO%20Turn.png?dl=0
@Don, @Mike
For MH370, during the first call at 18:39:55 UTC, the correlation between RX Power and BFO is low at -0.1291.
https://www.dropbox.com/s/imctn1yvk6382b6/MH370%20Call1%20CU6%20Rx%20Power%20vs%20BFO.png?dl=0
For MH370, during the second call at 23:14:01 UTC, the correlation between RX Power and BFO is higher at -0.6651.
https://www.dropbox.com/s/pvccqd8rkjrr3eg/MH370%20Call2%20CU6%20Rx%20Power%20vs%20BFO.png?dl=0
@Richard,
Thank you for jumping into that so quickly.
I will check the EIRP adjustment commands, GES to AES, for the voice channels. As I recall, the GES was incrementally ‘dialling down’ the AES transmit power by command during the call signalling period (whereas, for packet data operation, an EIRP is set at Log On for the duration of the Log On session).
Seattle Times:
Indonesia’s devastating final report blames Boeing 737 MAX design, certification in fatal Lion Air crash
The report is due to be released in the next few hours.
Andrew,
2:30 pm just gone.
@Richard,
Further to comment above:
During signalling on the SCPC C-channels the GES and AES exchange CALL-PROGRESS/STATUS REPORT SUs at 10 second intervals. In these SUs the GES signal an EIRP for the AES to adopt when transmitting on that SCPC channel (separate to the commanded EIRP for the R & T packet data channels). The commanded EIRP, as observed during both calls, is incrementally reduced.
\[*\] at 18:40:02, :12s, :22s, :32s, :42s, :52s and 23:14:07, :17s, :27s, :37s, :47s, :57s.
Here is an old graph showing the EIRP adjustment for C Channel phone calls. The EIRP starts out high and the GES sends commands to lower it incrementally (to save spacecraft resources) until the GES C/N0 values are a bit above the minimum necessary for solid communications. There are no further adjustments after the call set up.
http://bit.ly/3413OX9
JT610 final report available at the following link:
http://knkt.dephub.go.id/knkt/ntsc_aviation/baru/2018%20-%20035%20-%20PK-LQP%20Final%20Report.pdf
Andrew,
Thank you.
@Andrew
Wow. The cockpit voice recorder logs were very interesting (and terrifying). Those guys were in over their heads. No intention of demeaning them, they just were overwhelmed.
@Don
@Victor
https://drive.google.com/open?id=1N4MsXyqe3rEDVXj4MKY2PJQogZD3l0-j
@Ventus
Why do you thing ZS wanted to hide the terminus? That theme has reared its head time and again. I don’t see any compelling reason to support it.
@DennisW
‘Wow’ indeed. MCAS and the system that allowed it to happen are clearly the major contributing factors, but unfortunately s@#t still happens even with the best designed, certificated and maintained systems in the world (which MCAS clearly wasn’t). As pilots we need to be adequately prepared to deal with that s@#t if it happens because ultimately we are the last line of defence. I don’t believe these guys were adequately prepared, and that goes a lot deeper than not knowing anything about MCAS. That’s not intended as a criticism of the pilots; it’s aimed at a system that is allowing poorly trained and/or inexperienced pilots at the controls of complex, modern airliners. I hate to say it, but you get what you pay for – cost pressures are causing lowered standards in the airline industry, particularly in countries with weak regulatory authorities.
@DennisW
Wrong question.
What is the point in advertising the terminus, thus making it easy to find ?
The sim points S1/S2 (40S104E) were both a clue, and a challenge.
“Find me if you can – suckers”.
So far – he is winning.
@Andrew
That certainy seems to be the case here. When the shit hits the fan you fall back on your training (LEO, MEDIC, PILOT,…). There is little time for thinking (and you will probably do the wrong thing if you do think about it).
It was hard for me to become a medic after I retired. I found the training to be very offensive.
Instructor: Why did you do that?
Dennis: I thought…
Instructor: We are not training you to think, We are training you to follow the f’ing script.
At the end of the day (after 8 years of field experience) it was absolutely correct.
@Ventus
My question is why would he care? If he really wanted to complicate matters he would have flown at 230 degrees or so from the FMT to make the terminus as far from any search base as possible.
@Ventus45
RE: “What is the point in advertising the terminus, thus making it easy to find ?”
But why would he consider that heading towards the pole might advertise the terminus? As far as he was concerned, the aircraft had gone ‘dark’ before it turned back towards the Strait of Malacca. The aircraft then turned towards the SIO outside radar coverage, so even if the authorities had managed to track it on primary radar, they would not have been able to determine where (or if) it made another turn or in what direction. Surely he would have considered himself in the clear at that point, so why would he see any need to further obfuscate the aircraft’s tracking? After all, it was only after the aircraft disappeared that it became known the satellite data could be used to determine the approximate track.
@ventus45
“What is the point in advertising the terminus?”
It’s been advertised? I missed that.
(Meanwhile concurring with comments, immediately above, made by Dennis & Andrew)
@Victor
Re: MH370
I have a new mash-up theory.
Let’s say MH88 did hear mumbling from MH370.
Let’s say Utapao heard the actual transmission, per US Embassy.
And that transmission was MH370 is “breaking up”.
Malaysia is holding back this info, because it implies they had info and other implications.
> Consider the MH88 pilot said somebody shoud have heard this besides me.
> Consider Malaysia has apparently hid this (not reported in FI, right?)
> Consider Florence de Changy said 1:43AM makes more sense for this communication vs. 2:43
I was going ask you Victor, if you could think of any sensitive reason why Malaysia has not summarized the apparent MH88 contact with MH370, and now I have a theory at least for today.
@TBill: I’m sorry, but this story conflicts with just about every fact we know about MH370.
@Victor
all I am asking *maybe* MH370 pilot(s) were active on the radio during the diversion. I am suggesting the transmision(s) was possibly part of the plan to make the diversion look like a accident until such time as the aircraft got away.
(40S104E) [was] a clue
@Ventus: Here is just an idea I will throw out there. I have no idea if it is very consistent with the satellite data, but consider that at least for a little while, MH370 joined up with the simulated path at about Pulau Perak, and then followed it, pretty much, up until the FMT.
Thus, the hypothesis is that the simulated path really was Plan A, and for some reason, that plan was abandoned resulting in the FMT (perhaps because of a fighter jet interception? 😉 ).
So instead of proceeding on the simulated path over the Andaman Islands, the aircraft apparently cut through the Nicobar-Sumatra Strait.
But note also that the last leg of the simulated path went through MUTMI (roughly due south of the FMT). Therefore, the Plan A could easily be rejoined by flying FMT to MUTMI to 40S104E. Thus, after having rejoined the simulated path, the crossing point would be ~29.5S.
@Dennis: a course of 230 from the FMT heads pretty much straight for Reunion Island with a fairly close pass by the big navy base at Diego Garcia.
@Warren
There are three motivational possibilities in my view:
1> A path farther West from the FMT to maximize search difficutly. Not supported by the the ISAT data.
2> A path South (180 to South Pole) to make FMC input easy. Seems reasonanble.
3> A path at ~165 toward the Cocos as a final landing opportunity. My current preference, but not supported by the analytics.
Jeff Wise pointed out a long time ago some inconsistencies with the evidence from the flaperon found at Reunion. His interpretation of this evidence didn’t support the mainstream thesis of the flaperon drifting from a crash zone in the SIO.
It was hugely fortuitous for the flaperon to have landed at Reunion. The curious thing about Reunion is that it is now the ONLY European possession in the Indian Ocean that is undisputed by any other country in the region. They made a big show of promptly taking the flaperon into custody, examining it for clues, and tentatively identifying it as coming from MH370. The French are a powerful nation, and can’t be pushed over easily by other ‘big powers.’ Yet, they chose to go along with the mainstream MH370 narrative.
And it was only after the French had officially declared the flaperon to be part of MH370 that other debris began to (bravely?) show up months later, and in different (lesser?) locations around the western Indian Ocean. None of these other subsequent debris faced the same level of scrutiny that the ‘French’ flaperon has faced.
But here’s something to ponder: what if the flaperon had indeed drifted from the crash zone, but had landed at another spot in the Indian Ocean? It was perhaps later moved and ‘planted’ at Reunion, only to be ‘found’ in July 2015 to coincide with John Kerry’s visit to Beijing. John Kerry happens to be a close ally of France.
Here’s something else: Blaine Gibson’s fantastic string of luck in finding MH370 debris has been questioned by JW and Ghyslain Wattrelos (French NoK). Blaine happens to speak French quite well, so once again we are left with a ‘french’ connection, perhaps totally coincidental.
My question: what if the flaperon had landed on Diego Garcia (UK OT claimed by Mauritius), or on one of the Iles Eparses dotted around Madagascar (French OT claimed by Madagascar).
NOTE: for the first time, on Oct 23, 2019, a sitting French president (Macron) visited Iles Glorieuses, one of the Iles Eparses, and declared it a ‘strategic’ asset. The Iles Eparses are un-inhabited except for rotating units of French military including the Foreign Legion. Upto 30% of the Foreign Legion is ‘Russian’ speaking. A typical contract is 5 yrs, and Ex-Foreign Legion personnel are quickly hired as mercenaries in Private Military Companies because they speak both French and English (working with NATO). They may have also been hired to serve as IFSO’s.
1. I’ve always assumed the flaperon was found first because it was relatively buoyant, compared to other pieces.
2. I find the notion that anyone would wilfully redistribute the wreckage as absurd.
@DennisW
A path further west – head 230T ?
That is heading directly for the Cape of Good Hope. Have you ever had just even a cursory look at any of the maritime (ship) tracking web sites ?
Do you want to fly straight down the main shipping route in the Indian Ocean, from the Cape of Good Hope to the top of the Malacca Strait ? Do you want to overfly literally hundreds of ships, of all types, including Naval Vessels (some with air search radars), and perhaps even a US(N) carrier task group (also with Hawkeyes), not to mention doing a flyby, only 250nm SE of Diego Garcia ? Seriously ? It looks like the best way to be found (and/or – possibly shot down) !
FMC – 180/SP – for simplicity of selection – seems reasonable ?
Simplicity – for “ease of entry” ?
For a hijacker – with minimal knowledge – perhaps.
For a pilot – not a credible reason.
Simplicity – for “a tactical choice” ?
It’s viability as a tactical strategy, to get maximum southerly range, depends entirely on whether or not you consider yourself “home free” so to speak.
As Andrew reminds us (and it has been examined before – in detail) that depends ENTIRELY on being ABSOLUTELY SURE that you have evaded Sebang Radar. After studying those proposals with Cambridge SPx and other tools, I am personally not convinced you could be sure, not without descending virtually to the deck, which would then bring the obvious fuel use penalties. I simply don’t buy it – on those grounds.
@Canis: His [Jeff Wise’s] interpretation of this evidence didn’t support the mainstream thesis of the flaperon drifting from a crash zone in the SIO.
As I pointed out in a comment above, the flaperon barnacles are a complete red herring. They were probably 2 months old, or less, at the time of the discovery. I do have a bit of training in ichthyology (an MS), and although my specialty at the time was cutthroat trouts and pond smelts, I can at least read the literature on sea creatures and understand it. And Jeff Wise obviously cannot. The barnacles are meaningless.
Re: Blaine Gibson “fantastic string of luck”
Blaine had the same kind of “good luck” that Thomas Edison had, he worked very hard to make his discoveries. The story of this saga is that Malaysia lifted no finger to solve this problem (probably becuase they know what probably happened, and prefer to forget about it) leaving the door wide open for a concerned citizen, with a little help from his friends, to find so much debris.
@Ventus
I picked 230 out of the air. My intention was a heading further West and not paralleling the coast of Australia.
I agree that ease of data entry is probably not very important to a skilled pilot.
@DennisW and others
It is worthwhile remembering that the ping at 19:41 requires that the plane cross that arc or be tangent to the arc at that specific time. Azimuths greater than 189 or so and less than about 178 are inconsistent with this constraint. [Since I have only explored a limited subset of the possible solutions, I accept that someone may be able to show the contrary, but I am waiting for a computation of GE plot.]
@Sid
A wide range of track and speed is possible at 19:41. Graphic below from the DSTG book Figure 5.7.
https://photos.app.goo.gl/rkr4oZruACM123vn8
@Dennis,
The track and speed at 19:41 is constrained significantly if you consider data other than the BFO. For example the minimum in the BTO at about 19:52. The fact that the BTO is a minimum at about that time strongly indicates that the aircraft is on a course which is tangential to the arc. Furthermore the aircraft speed at that time can be calculated, and the result compares very favourably with Richard’s latest models.
@Brian said: The fact that the BTO is a minimum at about that time strongly indicates that the aircraft is on a course which is tangential to the arc.
As long as the “tangency criterion” correctly incorporates the uncertainty in the BTO measurements.
@VictorI
Agree.
My understanding is that an error of about 50us would be reasonable; perhaps 100us as an outside limit.
I should further clarify the statement to include that if the path runs closer to the satellite than the arc, then the path must enter the arc and exit the arc.
@Brian
I have never been a fan of the “tangency” argument. It implies more knowledge about the flight path than we can be certain of.
@Warren Platts. The flaperon barnacles. “They were probably 2 months old, or less, at the time of the discovery.”
What is your opinion please on why there was none older?
@DennisW
If you accept the ping rings, it is then a question of geometry (spherical :-)) and geography. Use Google earth and show some examples that support your contention.
@Sid Bennett: There are additional assumptions, such as nearly straight flight and nearly constant speed so that the aircraft-satellite range changes in a smooth manner in the time interval of interest.
@Andrew. Comments about the JT 610 final report:
https://www.dropbox.com/s/z8ihol0vz48fusb/Regarding%20the%20Final%20Report%20on%20Lion%20Air%20flight%20JT%20610.docx?dl=0
Incidentally when recently I posted some descent examples as part of a MH370 vapour lock reassessment, they excluded bank. I have now added the effect of that to example 6, (350 kt TAS, 30,000 ft, descent angle rate increasing); starting at 10 deg, rate 2 deg/sec, rising to 40 deg at the final transmission.
That increases lift, so drag, but has no material effect on the outcome.
@VictorI
Not at all. The pings define the arcs at specific times and each time is unknown to the pilot. So long as the path starts at about NILAM and ends on the 7th arc it could be considered. I can cross any arc more than once and the speed can vary between the maximum and stall and the altitude can transition multiple times, both up and down (so long as the fuel consumption is consistent). The path has already been considered to be curved as in some of the postulate magnetic courses.
If the plane is on the 19:21 arc at ping time and has to be on the 20:21 arc by ping time, it could cross up and back over the 19:21 arc multiple times. Perhaps. But it would not stray far from the 19:21 arc and the path would look quite implausible.
Anyone who wishes to criticize the 19:21 arc constraint needs to postulate a path that crosses the arc at 19:21 (in either direction) or is essentially tangent to it. But to ignore the requirement to be at the arc at 19:21 is incorrect.
[I am not certain that what I have asserted is entirely self-consistent, but it will have to do for today as I have a lot to do…]
@Victor
@Sid Bennett: There are additional assumptions, such as nearly straight flight and nearly constant speed so that the aircraft-satellite range changes in a smooth manner in the time interval of interest.
Thank you. While those assumptions are certainly reasonable, they are not certain.
@David re: barnacles, here is what wrote back in September:
“Regarding the flaperon barnacles that is a total red herring. The J. Poupin 12 August 2015 report was totally sloppy. If you go to the primary literature he cites (Evans 1958), the first sentence is “Information on the rate of growth of all Lepus species is scanty.” Poupin’s extrapolation is based on an anecdote mentioned in a letter based on a couple of buoys; it is totally unwarranted. Moreover Poupin does not cite Magni et al. (2014) “Evaluation of the floating time of a corpse found in a marine environment using the barnacle Lepas anatifera L. (Crustacea: Cirripedia: Pedunculata)” Forensic Science International (WARNING: the pictures of the corpse are gross af and very disturbing.) Anyways, they report “estimated growth rates for large (capitulum lengths >39 mm) L. anatifera striata ranged from 0.11 to 0.93 mm/day, with mean rates of about 0.39–0.58 mm/day.” So the largest of the flaperon barnacles were probably only 2 months old; if you assume the biggest ones were biggest because they grew faster than average, then they were perhaps quite a bit younger than 2 months.
But basically, the French expert Poupin’s estimate of the age is based on a logarithmic growth model that obviously isn’t warranted. He estimates the age of 36mm capitulum to be 476 days old–an average growth rate of 0.076 mm/day. But as the more recent research in the Magni paper shows, larger barnacles typically grow around 0.5 mm/day. Looking at the growth rates presented in Magni et al., the age of a 36 mm barnacle could range anywhere from 39 days to 327 days, with mean ages ranging from 62 days to 92 days.
@Sid Bennett: I’m sorry, but I have no idea what you are talking about. I never said to ignore arc constraints. We were discussing the tangency criterion, which is derived by a smooth fit of the BTO data.
@DennisW: No not certain, but the best we can do at this time.
@VictorI
Sorry if I misunderstood, but there has been some discussion recently regarding various azimuth possibilities without any supporting analysis.
Your comment might have been interpreted as suggesting that there were plausible paths that were not nominally tangent to the arc.
Since the 180 and 186 (and probably 189) paths spend a long period running essentially tangent to the arc in the vicinity of 19:41 (sorry about 19:21 in earlier email) whether the path crossed just inside the arc or not is difficult to discern with the data available.
As an approximate constraint, I believe it is worthwhile applying as a test for all proposed paths. 180 and 186 pass. I have not fooled around with 189. But, azimuths less than 180 have trouble with GCP routes.
@Sid
Sorry if I misunderstood, but there has been some discussion recently regarding various azimuth possibilities without any supporting analysis.
There is nothing to analyze! The graphic I referenced to the DSTG work is valid. Your tangent obsession is just that – an obsession. It feels good, but there is no data we have that validates it. I could, but won’t, create a number of paths intercepting the 19:41 arc.
@DennisW
I think that you are referring to Fig. 5.7 of the DSTG work.
The DSTG study used the Bayesian approach, which is a “modern” method. I used a deterministic path construction which was explored for best fit. The difference between apples and pears; or chalk and cheese, depending on your version of our common language.
The DSTG study could have eliminated all paths that did not meet the additional “substantially tangent” criterion,if they had known about it at the time. In no way would it have identified a “hot spot.” But it would have reduced the length of arc.
Asserting that you could produce such a (small number) path is not the same thing as actually producing one.
CU tomorrow….
@Sid Bennett said: The DSTG study could have eliminated all paths that did not meet the additional “substantially tangent” criterion,if they had known about it at the time.
The DSTG prioritized paths based on the statistical match to the BTOs (and to a lesser extent, the BFOs) and also applied an a priori distribution that favored paths with fewer maneuvers. That means paths that are “substantially tangent” were prioritized, as those paths would show a minimum BTO consistent with a path tangent to the arc (at the time of the minimum BTO). Dennis questions the prioritization of paths with fewer maneuvers, and (correctly) asserts that other paths that satisfy the BTO criteria are possible, whether or not probable. That’s the essence of the discussion.
Just a few thoughts.
ONE
I feel that using 19:41 as an “anchor” point in any model is fraught with danger, and that may be what is biasing everyone’s models.
There are three possibilities at 19:41.
(a) the aircraft could be outside (east of) the 19:41 arc, approaching from the east crossing to the west,
(b) the aircraft could be inside (west of) the 19:41 arc, approaching from the west crossing to the east, or
(c) the aircraft could be just tangentially “kissing” the 19:41 arc, approaching from the outside (east of) and departing outside (east of) the 19:41 arc.
In either case (a) or case (b), it has thus far been pretty much assumed that the crossing angle was shallow (i.e. small = near tangential anyway), but that is not certain, and even if it is correct, I think the crossing has been biased north all along, by the retention of the unproven, so called one-off 18:22 final radar hit, in everyone’s models.
Way too much can happen between 18:22 and 19:41, but even more can happen between 17:52 (Penang) and 19:41.
Refering to Figure 6 in Richard Godfrey, Bobby Ulich and Victor Iannellos’s paper, “Blowing in the wind”.
The last radar point 18:22 is at Lat 6.58 Lon 96.29. The time interval is 18:22 to 19:41 which is 79 minutes. Their red circle is 1,250 km radius, implying a speed of 949.37 kph or 513 knots. This puts their maximum southerly intersection of the 19:41 arc virtually at Waypoint MUTMI (4.133°S 92.978°E).
I contend that the veracity of the 18:22 radar hit is so questionable, on so many grounds, that it should be ignored. I further contend that the maximum 19:41 intersection should be based on the Penang phone logon at 17:52 at Lat 5.24 Lon 100.322. The time interval is then 17:52 to 19:41 which is 109 minutes. Using the same speed they used (949.37 kph or 513 knots) gives a radius of 1,725 km. This puts the absolute maximum southerly intersection of the 19:41 arc at about (7.933°S 92.0879°E), which is about 230 nm further south than the limit from the radar hit.
The aircraft could have crossed Sumatra, and I still think it most probably did. This means that there are any number of candidate paths turning left off the Penang to Vampi track, that can easily meet the 18:25/18:28 pings, and of course, the 19:41 arc, (either from the inside or outside), and they can meet the 19:41 arc well south of Mutmi.
The true 19:41 crossing point has a profound influence on the possible end points. The ATSB refers to the “19:41 problem” in typically cryptically oblique terms, by describing the probable position on the 19:41 arc as having a “geographic dependency”. However, they never (so far as I can determine) really explained exactly what they meant by the use of that term, and why they used such a term in the first place. Protecting diplomatic niceties perhaps ? It is a “fuzzy” problem. Look at it this way. The Malaysians could never say that MH370 went over Sumatra, even if they had rock solid proof that it did. Now look at it from the ATSB’s point of view. What would you say (publicly) if you (as ATSB) had reason to doubt what the Malaysians were telling you ? My explanation for the “fuzzy” problem, aka the “geographic dependency”, is that those who believe that the 18:22 radar hit position is genuine, have been deceived by both the Lido Slide, (which purports to show MH370 “all the way” to the 18:22 position), and the ATSB have been further deceived, by the “ten second lat / lon data points” that were “provided to the ATSB under seal (NEVER PUBLICLY RELEASED) by the RMAF”, and without any verifiable proof of origin. It is notable, that the ATSB were at pains to publicly say, that they ONLY got “the points”. (Nice way to cover your arse for an enquiry years later, perhaps ?).
In my view, both they (the ten second lat / lon data points) and the Lido Slide, post the white circle, are likely to be a false construct. The white circle in the Lido Slide is perhaps the clue. In my view, MH370 descended and dropped below the radar horizon near where the white circle begins, and turned left at a mid to low level to cross Sumatra. The subsequent hits shown to the north west of the white circle on the Lido Slide are not MH370 in my view. They are something else. I will leave that thought there. I therefore think, that since there is so much doubt about the latitude of the 19:41 crossing, and the wide range of latitudes which are possible (from Penang), that it would be much safer from a modelling point of view, to consciously discard 19:41 as an anchor, and “only” consider the three reasonably certain inside to outside crossings at 20:41, 21:41, 22:41 as “anchors” for constraining any “stable cruise” model.
TWO
Following on from that, I also think that the end point used in path models should be restricted to where we can be reasonably certain that the aircraft was still “in stable cruise flight”. The 00:19 data clearly does not meet that fundamental requirement, and should not be used (in my view) to generate paths, and further, the actual derivation of the the 00:19 BTO was “fudged” (in my view), to logically be consistent with the 00:11 BTO. Therefore, I feel that the last data point we can use for cruise modelling with real confidence is 22:41, although we can still use 00:11, but with caution. The reason for caution with using 00:11, is that there are too many possibilities at, immediately prior to, or “approaching”, the end of flight. In short, anything after 23:40 is subject to two base cases.
(a) Was it a ghost flight, wherein the actual timing of Right Engine Flame Out followed by Left Engine Flame Out followed by presumed APU Start may impact the 00:11 data ? If the first engine flame out was at or after 00:11, the “stable cruise condition” requirement is satisfied up to 00:11, so all well and good, but if first engine flame out occurred prior to 00″11, say at about 00:07 (as some believe) then it will have some (minor) impact on the 00:11 data.
(b) Was it an actively piloted flight to the end ? If so, this changes everything. We have to throw out even 00:11 as a reasonably safe “anchor”, because at, or very soon after 23:40, an active pilot (if intending to ditch) would have to commence descent.
THREE
I note the recent discussion re the 19:41 “tangent” question. My current proposed path crosses inside the 19:41 arc at a very shallow angle, and then crosses outside at 19:41. The actual crossing point is the second one, crossing from inside to outside the arc, about 100nm south of MUTMI, at 19:41, at about 5.80°S 92.71°E.
The currently proposed path is:-
From Penang, descend and turn left towards Tasek at 0542N09900E, thence, TASEK NAGAN MABIX ISBIX MUTMI RUNUT then onwards to the final waypoint (unreachable) which is IGPOL (on the old Perth to Cape Town route).
A second similar path is basically the same, with a slight variation off the west coast of Sumatra. The path is the same as far as NAGAN, then LUBIS UPROB to rejoin the original path at MUTMI. The track ISBIX – MUTMI – RUNUT is 189°True, and onward from RUNUT to IGPOL is 190°True, in other words, near enough to a great circle track from ISBIX onwards, which (since Isbix is more or less “on the Equator”) makes perfect sense, so as to maximize southern reach, commensurate with remaining in the dark. This route strategy produces a 6th arc (00:11) crossing about 38.1°S 86.1°E, and a 7th arc (00:19) crossing about 39.2°S 85.8°E.
@Warren Platts. The Poupin study was supplemented by another near Paris by Blamart and Bassinot, who researched oxygen isotopes in Lepas anatifera shells. Using Inatsuchi growth research results in particular they established that the largest was just a few months old and oxygen isotope levels in their shells were consistent with the specific water temperatures that prevailed in the vicinity of La Reunion from March to June 2015, the flaperon’s recovery being on 29th July.
While I notice from their references that Inatsuchi’s research was into Lepas anserifera I have the impression that the two are thought to be similar. Evans researched anatifera.
Barnacles removed from item 5, the interior panel recovered at Rodrigues Island, Mauritius on 30th March, 2016 were examined by Geoscience Australia, who referred to both Evans and Magni. They thought the faster Evans growth rate the more likely in the sea surface temperatures surrounding Mauritius between January, 2016 and the panel’s recovery.
That is curious; their recovery being 8 months apart yet the barnacles (both anatifera) age being of the same order (the panel’s, 45-
50 days).
It could be that these two items even beached earlier though it would be a coincidence if these two both did 2-3 months before recovery. Also, whereas other items recovered had been picked clean of barnacles, these two had not so the time from beaching to recovery should have been roughly similar.
One theory I have heard as to why there were no older barnacles is that, “Crabs, nudibranchs, worms and fish all love to feast on barnacles, providing a ready explanation for an absence of barnacles. A piece of debris could be colonised then picked clean several times.”
The similarity of the flaperon and panel raises the possibility that there is a more convincing explanation than coincidence, presumably natural, and some connection with predation might have to do.
As to the accuracy of growth rates, these are dependent not just on temperature but food supply, crowding, position, food supply, water movement, the surface texture at attachment and, presumably, age and immersion times. Daunting.
There is a little known paper by Goldberg who, at Vancouver Island, looked into commercialising Lepas anatifera. At pages 92/93 he describes mortality from toxic waste and Pile Perch of these barnacle albeit under quite different conditions (eg no piles or tides), and also growth. I see his references include Evans, McIntyre (fast growth: cited elsewhere too) and both Patel and Skerman, who were cited by Poupon also.
https://open.library.ubc.ca/cIRcle/collections/ubctheses/831/items/1.0096087
One other interesting feature of the recovered items is that they lack weed. The flaperon had more windage than others so travelled through the water faster, which should reduce weed. Others were transported more by current and Stoke’s effect, though their appearance on recovery was similar.
I have read no account of their natural longevity but it was interesting to learn of an overturned yacht that drifted past Kangaroo Island, South Australia early this year. It had overturned in the Indian Ocean 8½ years before and presumably had been drifting around it since.
https://www.theguardian.com/australia-news/2019/jan/03/teens-round-the-world-yacht-wild-eyes-found-floating-eight-years-after-boat-abandoned
Assuming that the barnacles are anatifera or the like, they may well have old amongst them though unfortunately the opportunity to gather some for research relevant to MH370 was missed. As it happens they answered one question that Jeff Wise raised, which is whether they can survive out of the water, though not the effect of dry time on their growth rate and for how long they can survive in a calm.
I note there is weed evident above the barnacles.
In summary, I think the question as to why there were no older Lepas recovered from these two items has legs still, though research is scanty. Therein lies a challenge.
@David,
Seemingly endless paths to follow.
“I think the question as to why there were no older Lepas recovered from these two items has legs still, though research is scanty. Therein lies a challenge.”
Having walked that path, I found that the early lifecycle phases of the Lepas, larvae to cyprid prior to attachment, is poorly understood. During a visit onboard the marine research vessel operated locally I learned that eddies (or gyres, but not the garbage patch scale examples) are typically well populated breeding grounds and habitat for similar sea life. Oceanography references show that eddies are typical around the islands of the SW Indian Ocean. Perhaps there’s a correlation between Lepas colonisation and such eddies/gyres? That the larvae-cyprid development phase and initial colonisation is subject to some localisation.
@Ventus45
I tend to agree 22:41 Arc5 is unfortunately our last solid point in the straight line flight assumption. The sat phone call at 23:14 took away the next Arc we would have otherwise had. Also the BFO for the 23:14 phone call was vacillating as far as making up a pseudo-Arc6. I got lost if the recent “power” discussion might help remediate the 23:14 sat call BFO.
On waypoints, re: flight sims, I have not found a way to do polar waypoints on the older PSS777. I believe it has a 89.3 degree southern limit. This might explain why ZS was using NZPG for PSS777, but presumably he was well aware in a commercial jet he could do polar waypoint. The newer PMDG777 does do polar waypoints. As far as flying to a waypoint on the other side of the globe, per your graphics, I am not sure if the flight sims can do that or not.
Personally I am not hung up on waypoints since it is very easy to enter any lat/long coordinate as a custom oceanic waypoint, and furthermore my vision tends to be he flew CMH or CTH in part to avoid a nefarious-looking waypoint. My vision tends to be, if we ever find the aircraft, we will not find a nefarious waypoint on the FDR or any computer chips (IFE, flight computers etc).
@Ventus45
Why is it necessary to trash the radar data? You can get the same result by adopting Warren Plats’ suggestion of NILAM_POVUS-ISBIX++ ?
Also, how does the 18:40 BFO data fit in? The bias offset may not be as well defined as for the BT0/BFO pairs, but it not significant in view of the magnitude of the measurement.
@all
As has been pointed out, the 3rd arc is not geometrically positioned to closely relate the BTO value to a position along the flight path. But it serves as a useful filter, eliminating a class of paths having an azimuth that is relatively constant near ISBIX. My point is that it ought to be one of the limitations on the plausibility of a proposed path at least in a qualitative sense.
@Don Thompson. “Perhaps there’s a correlation between Lepas colonisation and such eddies/gyres?” That’s a thought.
De Dekker, at the Australian National University, who as you know undertook work similar to Blamart and Bassinot, wrote, “L. anatifera has a cosmopolitan geographical range across the open water”, though that does address the question directly.
Adding to the muddle he noted also, “Further difficulty at assessing the results of the analyses on the shells is that we are unaware as to (1) when the barnacles first adhered to the aircraft debris, (2) if they did possibly undergo a period of reduced or no growth during their life, (3) if all the barnacles on a single debris grew synchronously. Comparison of the profiles for two barnacle scuta collected on the same aircraft debris provided different estimated temperature profiles, thus confusing our possible interpretation of the path in the Indian Ocean where the barnacles may have grown.”
I got in touch with NOAA and asked whether they had photos of recovered drifters or any records of marine growth on them. No.
@Sid Bennett
The 18:40 BFO can be explained by being in a climb, (when safely heading away from Sebang radar), in either the leg Mabix to Isbix (at approx 3 N) or, on the Lubis to Uprob leg (at approx 1.9 N).
My path Nagan Mabix Isbix is about 150nm shorter from the 18:25 arc (crossing the west coast of Sumatra near Nagan) to Isbix, than Warren’s path, Nilam (near the 18:25 arc) Povus Isbix.
My time to Isbix is therfore about 18 minutes earlier than Warren’s, meaning I can get about 2.5 degrees latitude further south on the 19:41 arc.
On the other path, (Nagan Lubis Uprob Mutmi) the time difference passing east of Isbix is a bit over 20 minutes.
The point to be made is this.
The further south the actual 19:41 arc crossing point, the further south west the path to the 00:11 crossing becomes (and by extension the 00:19 end points).
Therefore, since end points on the 7th Arc around 85°/86°E (and south of it – gliding towards Igpol) are possible, and have not been searched, they must do so, in my view.
Ventus: Re “The 18:40 BFO can be explained by being in a climb…”, don’t you mean descent?
@Vevtus45
The difference in our approaches is that I don’t care where the plane ends up. The path needs to have the minimum number of factors that need to be explained away. That is: those factors that are not supported by another piece of independent technical data. (BTW, except for the possible invalid data point at first re-log-on and very last data point, I consider the Inmarsat data to be self-supporting within some plausible error bounds.)
Note that with attributing the 18:40 BFO to a descent (presumably), there is no independent satellite data evidence for a turn South. (Except for the later discovered debris). The time of the descent may be explained (perhaps) but it is essentially arbitrary.
I believe that the 189T path is more satisfactorily explained by Warren’s waypoints, although I still feel it needs a little refinement near NILAM. This still does not resolve the debate about fuel.
Can you remind me where the plane is at 18:25? And why.
@Sid Bennett said: Note that with attributing the 18:40 BFO to a descent (presumably), there is no independent satellite data evidence for a turn South. (Except for the later discovered debris)
The BFO values from 19:41 to 24:11 are evidence of a southward track.
@VictorI
Sorry for the delay in answering. I was sort of off line while getting to London.
The original Ashton paper postulated that there could be a North path and a South path, but concluded that there was a better match to the later time BFOs for the south. But that analysis didn’t include azimuth and path changes as some people have used to match the predicted and observed data.
I spent an hour with an old version of the Barry’s program to recall some studies I did very early on. With some curvature of the path (340 at NILAM down to perhaps 320 at the late stages, and some “adjusting” of the speed one can find a plausible (maybe) path. But, the number of assumptions as to maneuvering to get it makes it unappealing.
So, I withdraw my comment regarding the unique significance of the 18:41 data point.
@DonT @sk999 @Victor
Going over some old posts.
@sk999/all – re: RAT
> is there a black contrail with the RAT deployment?
> What causes that? and
> how long does it last?
@DonT/all – re: Sat Calls MAS-to-MH370
On the unanswered, sat phone calls at 18:40 and 23:14
> Does the caller MAS know in real time the call went thru to the aircraft? So this should tell them the aircraft was flying, if they are thinking.
> Does the phone ring in the aircraft but is just not answered?
> Was there a sat call before 1840? I know they tried ACARS text.
I know MAS COO Dunleavy said they assumed the aircraft might still be flying, but he did not say why they felt that.
@Richard
Are you still thinking low altitude descent for MH370 to circumvent Indonesian radar?
This below is very nice “incredible” video of the shipping routes… seems like MH370 might not get too low?
https://www.vox.com/2016/4/25/11503152/shipping-routes-map
@TBill
I know MAS COO Dunleavy said they assumed the aircraft might still be flying, but he did not say why they felt that.
Every facet of the Malaysian response telegraphs that they knew the aircraft was still flying, and they were waiting for a landing to determine the details of their response. The S&R efforts were removed from normal channels and handled at high levels in the government.
@DennisW…could you please care to expand on your statement?
@CMR
No. Just read the ICAO summary of the Malaysian response.
https://www.icao.int/APAC/Meetings/2015%20APSARTF3/WP05%20ICAO%20Brief%20on%20the%20SAR%20Response%20to%20MH370.pdf
@TBill
You asked “@Richard Are you still thinking a low altitude descent for MH370 to circumvent Indonesian radar?”
You also kindly shared a video animation of the global shipping routes.
Many thanks for the very interesting video of just how many ships pass through the Malacca Straits. I have sailed through that area and you not only need to watch out for all the ships passing, but also for the rubbish they throw overboard. I once saw a 3 seater sofa with a metal frame floating towards me whilst sailing in the middle of the Malacca Straits. That would make quite a dent in a fibre glass hull at the waterline.
In answer to your question, yes I am still thinking a low altitude descent is required for MH370 to circumvent Indonesian Military radar at Lhokseumawe and Thai Military radar at Phuket. Reliable sources report that Sabang radar was not operational that night, of course, whether the pilot knew that fact is open to discussion. In order to be out of radar range for the FMT, the altitude needs to be below 20,000 feet. In order to be still in a descent during the call and match the BFOs, the altitude would need to be around 10,000 feet or lower. I think the pilot would have selected a flight level at a round number like FL100.
I am not sure that a crew on a large cargo ship would notice MH370 at say FL100 (10,390 feet). There is so much noise from the engine room on a large cargo ship, that you would not hear MH370 even on a windless night. Even on a moonless and cloudless night with the navigation lights switched off, it would be very difficult to pick out an aircraft at a low altitude even if you were on deck. However, for a sailing boat a windless, moonless, cloudless night is great for staring at the stars and spotting passing aircraft.
@DennisW
Many thanks for reminding us of the damning ICAO 2015 report on MH370.
Full of words like “unsuccessful”, “difficult”, “poor”, “ad-hoc”, “lack”, “lapse”, etc. in relation to “understanding”, “information flow”, “coordination”, “preparedness”, “cooperation”, “agreement”, “resources”, “oversight”, etc.
The report is generally damning of the lack of cooperation between the involved countries and in particular between their civil and military organisations. The report singles out the problems that Australia had to get information from Inmarsat on the satellite analysis and from the Malaysians on the cargo manifest.
Too little, too late, too confused, too obfuscated, too hush-hush and too don’t care.
@DennisW
That is intersting ICAO they imply Malaysia was watching 370 on primary radar. I would say maybe they were watching with a tape recorder not human eyes. If MY really were watching, they have some explaining to do. Also they say 2:15 last radar point vs. 2:22 (18:22).
@TBill,
You asked some questions about satvoice.
Only two calls were originated to 9M-MRO, one at 18:39 from +60387871264 (MAS Flight Operations office) and the second at 23:13 from +60387874704 (recollection that it was listed as assigned to a specific individual). The calls routed to the flight compartment, so would chime via the AMU and be annuniciated on the MCDUs. Call clearance was due to no answer, the satcom channels were established & held for 60 seconds as each call was progressed.
FWIW, MAS operates its own HF air-to-ground communication system, put in place as the long-range (voice) communication system for its B737 fleet operating over the Bay of Bengal. 9M-MRO was equipped with HF radio yet no reference has been made in any official report concerning the loss of 9M-MRO concerning any search of archived recordings, should they exist, for that HF communication system.
@Richard
I partcular in response to @CMR above, paragraph n) on page 3:
n) The RO had communication with the RCCs in Kuala Lumpur and Canberra, which expressed concern about the management of aircraft within the Australian Search and Rescue Region (SRR). The search aircraft appeared to be under the direction of high Malaysian officials, and not the RCCs. It was not clear that the States involved were actively searching within their airspace under the provisions of Annex 12 paragraph 5.3.1 i). Moreover, the RCCs were reportedly receiving information only from journalists or via ‘diplomatic channels’.
@DonT
No I never heard about the MAS HF radio system. Interesting and up my alley as far as considering off-the-record contact with MH370, but I am weak on understanding aircraft radio comms.
@DennisW. Of passing relevance in case you were unaware of it, Malaysia tabled a report (as -WP06) at the same Jan 2015 meeting:
https://www.icao.int/APAC/Meetings/2015%20APSARTF3/WP06%20MH370%20SAR%20Operations%20and%20Lessons%20Learnt%20(Malaysia).pdf
Points relevant to recent discussions:
• A Bombadier CL415 was the first Search and Rescue aircraft despatched (2.13).
• The Kuala Lumpur Aeronautical Rescue Coordination Centre first learnt of a possible air turn back from the RMAF at 10:30 PM local on 8th March (2.14).
• Verification of the military data took a while (2.25 (e)).
• Incomplete information to the KL ARCC on search area derivation hampered fast action by others (2.25 (g)).
• At 2.29, there is a requirement to, “Establish a legal framework to support the roles and responsibilities in handling various SAR missions.”
Australia reported also (-WP14). There was also a power point motivator and others I suppose.
In addressing this accident the ICAO issued the Asia/Pacific Search and Rescue Plan, Version 2.0, in September 2016: https://www.icao.int/APAC/Documents/edocs/Asia%20Pacific%20SAR%20Plan%20V2.0.pdf
• This mentions GADSS (2.5 and 5.5 to 5.7) and COSPAS/SARSAT developments (5.8 to 5.11).
• At section 6.2 – 6.12 it summarises the Asia Pacific SAR resource and organisation situation.
• At 7.1 it responds to Malaysia’s 2.29.
An erudite June 2017 master’s thesis by Lt. Haertel, USN focusses (pages 73-83) on MH370 information sharing issues (apposite to what the US military can expect in dealings with ASEAN countries):
https://apps.dtic.mil/dtic/tr/fulltext/u2/1038727.pdf
There was also an August 2015 paper summarising the outcome of the January and July meetings that year, which attached a draft version 1 of the September 2016 ICAO paper above.
At 2.19 it does mention a change to initial ELT transmission delay from 50 secs to 3.
https://www.transportstyrelsen.se/contentassets/f42f070c245e4572abf73d7fd795f8d8/22-wp34.pdf
@David,
A topic about which I have not found discussion, is the abandonment of ATS route B219, replacing it with W546.
B219 was the direct route, involving multiple crossings of the Bangkok and KL FIR boundary, between the VKB and VPG VORs.
W546 now involves an intermediate waypoint, OPOMO, between VKB and VPG thus keeping traffic that is enroute to/from VPG via the IGARI area within the KL FIR.
@David, Dennis, Don: It is difficult to know whether Malaysia’s actions reflect malice, incompetence, or attempts to hide either. After many years, I am leaning towards incompetence and then attempts to hide the incompetence out of embarrassment.
The military response is a great example. Despite claims to the contrary, likely MH370 was NOT seen in real-time because the military were not watching the radar, and the civilians were not monitoring primary targets. A review of the military radar recordings after the disappearance demonstrated that MH370 was indeed detected by both military and civilian primary radar. However, the military radar data showed that altitude discrimination was not working, and there were significant holes in the coverage, both due to inadequate maintenance and calibration. The contorted explanations in the days after the disappearance were attempts to avoid embarrassment.
To this day, the ATSB still has not received the entire military data set that was (mistakenly) shown to the NOK at the Lido Hotel.
@Victor
Was Malaysia embarrassed because of,
a) Malaysian incompetence in dealing with the hijacking,
b) or was it because the hijacking exposed the nefarious activities of MAS?
@CanisMR: I suspect incompetence rather than malice, but I don’t know. What malicious behavior do you attribute to Malaysia?
@CMR
Competence was an issue, of course, but the control of the response by high levels of government transcends an incompetence explanation. Do you think Trump would involve himself or his staff in an aircraft hijacking episode (other than in the Ukraine perhaps)? Every state has people assigned for that purpose and trained in protocols.
@Don Thompson
@David
RE: “A topic about which I have not found discussion, is the abandonment of ATS route B219, replacing it with W546.
B219 was the direct route, involving multiple crossings of the Bangkok and KL FIR boundary, between the VKB and VPG VORs.
W546 now involves an intermediate waypoint, OPOMO, between VKB and VPG thus keeping traffic that is enroute to/from VPG via the IGARI area within the KL FIR.”
I flew B219 on many occasions pre-2011. We were controlled by Kuala Lumpur ACC all the way from VKB to VPG and there was no requirement to contact Bangkok ACC, even though the airway crossed into southern Thailand. I assume there must have been some regional ATC agreement in place to simplify the control of traffic along the airway. Thailand might have withdrawn that agreement because of the ongoing problems in its southern border area, particularly given Malaysia’s lacklustre response to the passage of an unidentified aircraft (ie MH370) along the airway. The withdrawal of such an agreement would have made the airway unviable.
@Victor,
I agree with Dennis. Take 9/11, and the lack of response from NORAD.
Was it not embarrassing they failed to recognize that 3 aircraft had gone ‘dark’ after the first tower got hit, and they failed scramble fighter jets? Most would agree that it was. The Malaysians would be in the same predicament.
But it’s a big leap to go from embarrassment to active cover-up, involving not just Malaysia but also the Australia, UK, and other SEA countries.
Cover-up implies that secrets could be exposed.
Malaysia is not just embarrassed, but has been trying to cover-up what happened.
@CanisMagnusRufus
Don’t forget that Asian cultures are very different to the ‘West’, particularly when it comes to ‘losing face’. The prevention of embarrassment at all costs is a very powerful motivator in Asian cultures.
https://internationalman.com/articles/what-is-face-in-asian-culture-and-why-should-we-care/
https://www.tripsavvy.com/saving-face-and-losing-face-1458303
@Andrew… ‘face’ applies at the individual level, but I doubt it applies at the level of institutions. Malaysians have clearly not been shy about exposing 1MDB scandal.
@Andrew
Nice try, bit it is deeper than that in IMO.
ZS hijacked the aircraft with a specific set of demands in mind. Those demands were not met, and he exacuted the alternative.
@Victor,
Why the cover-up due to malice?
The Malaysians were either conducting, or aiding surveillance in the S.China Sea.
The following Reuters article is a very nice summary.
https://www.google.com/amp/s/mobile.reuters.com/article/amp/idUSKCN1S80YB
@CanisMagnusRufus
RE: “…‘face’ applies at the individual level, but I doubt it applies at the level of institutions.”
If you had ever lived in Asia you would know that is not true; it applies at the national level as much as it does at the individual level. The following paper discusses the concept of national face in East Asia, but the same concept applies in other Asian cultures:
Nation, Face, and Identity: An Initial Investigation of National Face in East Asia
I’d argue that exposure of the 1MDB scandal is political and is largely confined to allegations against certain individuals (Najib Razak in particular), not the entire nation. MH370 is a very different case, in that the government’s atrocious response to the disappearance exposed its incompetence and showed how poorly the nation was prepared for such an event. I suspect that’s the major reason why the Malaysian government is reluctant to keep searching for MH370 – in its view, the least worst option is to keep quiet and move on, rather than be constantly reminded about its failings.
@DennisW: If the captain wanted to maximize his chances of Malaysia agreeing to a proposed settlement, he would have used public pressure. After all, he had a satellite phone for calling any news agency in the world. In the event the negotiation failed, that public pressure would have also reduced the chances of the administration’s re-election. It makes no sense to me that during or after the negotiation, the negotiators would keep things quiet.
@Victor
Valid point, and one I have also strugged with. The lack of publicity definitely runs counter to our conventional Western thinking.
However, the notion that ZS was a suicidal murderer has no appeal to me. The diversion was done for a reason, IMO.
The question of communications with the plane has always troubled me.
There were (apparently) only two satellite telephone call attempts. One would have though that attempts would have been made more times (at least between the two known attempts) once the brilliant (?) idea of trying to use the satellite link was executed. Is there explanation of this in the reports.
I presume that there was a way of establishing communication between a military chase plane and the flight? That is, some common emergency frequency. Would that be always monitored in the plane?
@Sid Bennett
RE: “I presume that there was a way of establishing communication between a military chase plane and the flight? That is, some common emergency frequency. Would that be always monitored in the plane?”
According to ICAO Annex 10, aircraft are expected to monitor the VHF emergency frequency (121.5 MHz) whenever possible. That requirement was reflected in the MAS Operations Manual.
@Sid Bennett
There was a long string of ACARS messages from MAS operations to MH370!
Some to the Cockpit Printer, some to the Cockpit Display and 2 to the Cockpit Sat-Phone.
Some ACARS messages were via Satellite, some via VHF.
Most messages were on auto-repeat.
What I find strange is (with one exception at 23:14 UTC) the communication attempts stopped at 18:41 UTC.
@Richard
…yes that is a little strange.
MAS/MY did pretty good sat comm attempts from 1800 to 1840, but MH370 SATCOM was off til 1825.
Couple of possibiities, either something hidden going on, but simpler explanation is they did not immediately realize the sat phone ringing meant the aircraft was still flying with SATCOM on, which would have suggested more tries. At this point lesser experienced MAS ops on duty. Later COO Dunleavy came in an tried to manage and he started putting 2&2 together better.
Richard,
You said:
What I find strange is (with one exception at 23:14 UTC) the communication attempts stopped at 18:41 UTC.
A call at 23:14 might be consistent with an anticipated landing at YPCC after that landing became overdue.
@TBill,
You are incorrect to state Dunleavy’s role, in March 2014, was COO (Chief Operating Officer).
Hugh Dunleavy’s role was Director of Commercial/Chief Commercial Officer.
If you are thinking of a member of the MAS senior management team who may have been capable of managing from a position of operational knowledge, then Mohd Fuad Sharuji might be that person. Sharuji was then VP for Operations Control Centre and is also described as having assumed the role of Crisis Director during the loss of both MH370 and MH17.
@DonT
Thank you clarifying the MAS management titles. But I am thinking of Dunleavy I am quite sure he gave account of the latter part of the evening as he arrived early for a 6AM flight and started working in it.
@TBill,
The Dunleavy interview, by Lucy Tobin & published in the London Evening Standard, described that Dunleavy received an ‘emergency text’ at 4am while on his way to KLIA to catch a plane to a business event. The article also describes that the text was sent by the air traffic controllers. I doubt DCA’s ATC was the origin of the message, more likely that the MAS flight ops team instigated the alert to a senior management group. A writer’s license, Tobin’s article wasn’t providing a precise timeline for events.
In other news, a third vessel joins the Ocean Infinity fleet: the Normand Frontier.
@Don Thompson: My guess is if it stops in South Africa, perhaps there is a chance it is provisioning for work in the SIO. Otherwise, it doesn’t seem likely. What do others more knowledgeable think?
Re the OI Normand Frontier, according to an OI source, it is NOT headed to the 7th arc. It is on a different mission now.
Re Peter Large’s thesis… having to do with his theory that it might be possible to extract rough heading information from the GES Rcv-Pwr data, I have confirmed with an ex-Ball engineer who was involved in the AirLink antenna design that the Beam Steering Unit (BSU) on 9M-MRO did conform to the 1991 ARINC 741 standard that requires the BSU to send the antenna gain back to the SDU continuously so that the SDU can adjust the HPA output continuously so as to maintain a near constant AES uplink EIRP, regardless of the antenna pointing angle. Sorry for the long sentence!
@Victor. Your, “However, the military radar data showed that altitude discrimination was not working, and there were significant holes in the coverage, both due to inadequate maintenance and calibration. The contorted explanations in the days after the disappearance were attempts to avoid embarrassment. ”
Possibly the holes arose as the aircraft traversed the varying strength in radar antenna radiation lobes, inadequate maintenance and calibration having reduced overall performance. That might imply also that there was no vertical sweep operative, in the radar(s) concerned.
However in the diagram at page 8 of the below a feature is that the durations of tracked times and of those when there was no tracking have trends, the tracked decreasing as the aircraft travels west, while the no tracking gaps (ie coasting plus lack of ‘paints’) increased steadily.
http://www.mot.gov.my/en/Laporan%20MH%20370/MH%20370%20Safety%20Investigation%20Report%20Slides.pdf
That is contrary to what one would expect – that irrespective of lobe shapes the gaps would decrease in size with range increase as would their frequency decrease with range decrease. So there might be another cause. What that might be, and its importance, are not obvious to me.
More generally, unless a momentary equipment failure caused this surveillance and air direction system’s apparent inadequacy, that would have been evident earlier. Presumably it would extend to all alert phases unless that radar system had supplement, eg airborne early warning.
It would be understandable if after this accident there was a reluctance to expose such a weakness to malefactors, at least until the problem was rectified.
Similarly, had a temporary failure been the cause, or even if not, I would have expected this to have been made public to explain/cover for the system’s lack of integrity.
With no such explanation having been offered it is puzzling why the apparent vulnerability has been left unscrutinised or even remarked on in Malaysia, and what it might mean to the investigation.
That aside I wonder how convincingly has been the demonstration that other radar records, apparently not suffering such egregious gaps, link these track segments to the one aircraft and that being MH370. Is the supposed track up the Malacca Straights known for sure?
What would have been known to the perpetrator(s) is another question, though rhetorical. He might well have been confident that the aircraft’s whereabouts disclosed by radar would be followed in real time and this made known to the Malaysian Government, though the importance of all this would depend on what the plan was.
Surely he would not have supposed that an unidentified aircraft at speed heading unheralded towards a major base would be classified as friendly, without even some interrogation?
5th para first line: Amend please to, ” …the gaps would decrease in size with range DECREASE…
@David,
Per the “BRIEFING to MEDIA” slides, data relating to items 1 thru 8 on the page “TURN BACK AND MILITARY RADAR (RMAF)” were sourced from the air traffic control systems, including Butterworth’s TAR operated by TUDM as part of the national air traffic control network.
You write, “Is the supposed track up the Malacca Straights known for sure?”
The post here, MH370 Flight Around Penang, shows all PSR plots as transmitted across the ATC network to DCA’s Subang ATC centre. Those plots cease before the target overflies Palau Perak but it is established on a vector directly towards VAMPI. These segments of short, but continuous, PSR tracking from Butterworth’s TAR and Kota Bharu’s radar do link together coherently.
Subsequent to the last plot from Butterworth’s TAR we have no ‘data’, only a picture depicting something. Something that is likely to be the continued track 9M-MRO.
Concerning failures, inadequacy of operational performance, refer to recent posts about ‘face’.
@David
I am certain that most of your questions can be answered by: It’s too secret for you to know.
This is unlikely to change. My expectation is that most of the staff have never seen a real alert and were on tea break. The higher ups were appalled by this and after punishing several corporals severely, swore everyone to secrecy under pain of ….
@David: The figure you cite is misleading. It is labeled “Turnback and Military Radar”, yet the events labeled 1-8 actually describe the [civilian] primary radar data, where the appearance and disappearance of targets can be explained by the range limits of Kota Bharu and Butterworth approach radar, and the cone-of-silence over Kota Bharu.
VI: I inadvertently left out the word “civilian”, and later added it in brackets.
@David
@DonT
The one radar question in my mind is why the gap(s) in the Butterworth civil primary radar?
As far as Pulau Perak to MEKAR, I assume we may have some non-Malaysian points in there such as 1822.
@DennisW: The scenario in which the captain’s original intention was to divert the plane to the SIO is not appealing to me, either, for a number of reasons. However, that continues to be the simplest explanation consistent with the data. I remain open to other possibilities if other evidence surfaces.
We know that corruption exists in Malaysia. We also know that over time, the corruption tends to be exposed (whether or not the perpetrators are held accountable for crimes). Yet, other than blog comments from @TimR, we’ve heard nothing about a possible negotiation between the Najib regime and a team on the ground working with the captain.
Of course, the cover-up could have been perfect (and perhaps there were other crimes and perfect cover-ups unknown to us). I weigh that as less likely than the scenario in which the captain was working alone with the original intention to fly the plane to fuel exhaustion in the SIO, as unappealing as that scenario is.
@Victor
Other than TimR I would say there were other social media posts and the annonymous email to one of the media rags, which escapes me at the moment. Admittedly we are still a day late and a dollar short.
@TBill: Do you mean the email claiming the Uyghurs were responsible?
We have radar data from:
(1) KLIA TAR.
(2) Genting RSR.
(3) KB TAR.
(4) KB PSR.
(5) Butterworth PSR.
(6) Western Hill PSR.
We need to be careful to differentiate between radar sources.
@Victor
you said:
Yet, other than blog comments from @TimR, we’ve heard nothing about a possible negotiation between the Najib regime and a team on the ground working with the captain.
The Malaysian response in the hours after Igari strongly suggest that the diversion was known and understood at high levels in the Malaysian government. Why else would the response be coordinated by those people (as stated in the unusually critical ICAO report).
@DennisW: I suspect that once Hishammuddin, who was both the Minister of Transport and Minister of Defense, was briefed soon after the disappearance, all future actions were primarily motivated by control of political damage.
@Victor wrote:… all future actions were primarily motivated by control of political damage.
With the passage of time the politicians in charge have gone; in a “new broom” sweeps clean scenario. The only problem is the so-called “new broom” was an “old broom”. The likelihood of any meaningful change is not good.
@Don Thompson, Sid Bennett, Victor, TBill. Re the radar, thank you for your remarks, the reminder Don of that comprehensive January post and the Malacca Straits transit reassurance.
Thank you Victor for correcting my misapprehension of that page 8.
@Victor
You said – in response to my strange Malaysian behavior post:
@DennisW: I suspect that once Hishammuddin, who was both the Minister of Transport and Minister of Defense, was briefed soon after the disappearance, all future actions were primarily motivated by control of political damage.
Are you suggesting that damage control was in progress before the Malaysian government realized MH370 was diverted and not suffering some sort of failure? I believe it is obvious the government knew it was a diversion long before the flight terinated. Clairvoyance?
@Victor
…above where I said there were others in addition @TimR I was in reference to Yahoo.sng comment posts and the following email reference (Daily Mail 12-Apr-2014)
“An email received by the Mail recently suggested that the aircraft had been hijacked and that the pilots had been ordered to fly around Malaysian and Indonesian air space while negotiations were carried out.
Those negotiations, said the email – from a source in Malaysia which could not be verified – demanded the dropping of a jail sentence imposed on Malaysian opposition leader Anwar Ibrahim.
The hijackers, said the email, gave government negotiators five hours to meet their demands or the plane would be destroyed.”
@DennisW. About negotiations you wrote, “Those demands were not met, and he executed the alternative.”
@TBill. You wrote, “The hijackers, said the email, gave government negotiators five hours to meet their demands or the plane would be destroyed.”
Conflating these, ‘plane’ destruction would end the threat, so pointless, that is unless it was to be a demonstration by the perpetrators and if necessary to be followed up.
That there was no such follow up might be explained by recoil at the unintended loss of all souls onboard, possibly as a result of co-pilot, crew and passenger intervention.
@DennisW: I suspect that once the military radar data was discovered, it was obvious to everybody that an intentional diversion was most likely. That likely occurred some hours after the disappearance at IGARI, and perhaps before the flight terminated.
As an aside, I was told by somebody that was sent to Malaysia after the disappearance that there was conflict between the military and civil aviation officials. The civilians believed there was a crash in the South China Sea. (I don’t know why they ignored their own primary radar data.) The military believed there was a turnback at IGARI. It took some days before the turnback became the accepted narrative.
Which actions do you think are consistent with a negotiation between Najib and the diverters?
@TBill: Thanks for that email reference. The implication in the email is that neither the captain nor the first officer were complicit in the diversion. That’s not consistent with the timeline of events at IGARI.
@Victor
I think most people believe the military radar data was not used in real time, but recorded data was invoked well after the aircaft terminated. That would be consistent with the initial search in the South China Sea.
It is hard to reconcile the high level Malaysian SAR involvement early in the response if they were not aware a diversion was taking place. There is still a group of people on this site who do not believe the flight was intentionally diverted.
I don’t have any evidence of negotiations having taken place, but it is the most likely scenario given the facts we have. No other way to explain the initial Malaysian response, and subsequent behavior. There is nothing to even remotely suggest a murder/suicide scenario or an aircraft failure.
@Victor @David
Well I was giving some license to the creator of the email to modify the story by April_2014. You know my ambivalent feelings. the rumor could be true or false, and if true, might be inaccurate, if false, was created for some unknown reason. By April the emailer would have known the plane was declared crashed, so the older rumor of pilot diversion needed a new ending and potentially a new perp. In any casse we are saying George Bibel’s assessment still stands: MH370 likely crime = Malaysian home grown, typcial KLIA intrigue.
@Victor as an aside, not the least bit sure on this, but I am keeping open the possibility the distress call picked up USA was true and maybe the same radio contact to the (MH88) pilot. If so this might partially explain a few things like the intial SCS search focus.
@Victor
PS- When I say above the distress call “true” what I am saying is the distress call was actually made, perhaps of course for reasons of subterfuge.
I would like to suggest considering an option that is related to cargo, which are still unexplained (2200 kg of accessories, 90 kg added to the manifest after departure and maybe something else).
The load could contain something:
– very important and valuable and/or
– very embarrassing
for the government (or VIP associated with the government) in relation to the cargo destination.This can explain direct and immediate interest in disappearance at such a high level and the lack of determination in finding the aircraft.
The reason for the diversion could be:
– take over or destroy the load for the perpetrator’s own purposes (this matches the third-party hijacking) or
– disclosure of the the load contents in order to create a governmental scandal (this matches ZS, requires an unexpected but safe landing and access to free media).
Probably in both cases the action could not be planned in advance but it could use elements practiced in other matters. A minimum share of people on the ground (1-2) is sufficient. These people will hide until the plane is found.
All above applies to diversion initiation only.
What happened next – who knows?
Pilot error? Plane malfunction? Accident? Death of passengers and cabin crew? Hiding plane? Blurring traces? Suicide? Saving face?
@Greg
The ‘mysterious’ load could simply be a cover story to disguise extra fuel the aircraft was carrying which enabled the plane to veer off and take a detour from it’s original flight path.
To the pilots here: is this plausible?
@CanisMR
There appears to be normal fuel load on MH370. The MAS ecords have been quite open on this matter and we see no major problem. Except for the fact we do not have other MH370 flights data base, there is not much room for questioning the fuel load. For a flight to China, you need a little extra in the base case. Obviously the normal amount of fuel loaded already allowed a quite long flight maybe as long as til 9AM if you assume a long glide.
Florence De Changy and others use the false accusations of extra fuel as proof that there is a conspriracy to unfairly blame the pilot and railroad the pilot. Let’s not give her any more ammo to seed doubt about the facts. She is from Venus and I am from Mars, as far as data interpretation aptitude.
As far as cargo, my perception is lots of secret/clandestine cargo is the normal case for MAS, so while there may have been some secret stuff on MH370, as far as we know, that was the normal secret stuff. There is certainly room to consider cargo issues, but to date after 5 years nothing yet apparent.
@Tbill
The fact that Malaysian govt. is willing to allow accusations of murder/suicide against ZS to go unchallenged speaks volumes. They’d rather allow this than let the truth come out, which in turn suggests that the truth is much uglier.
@CanisMR: Starting about a month after the disappearance, the Malaysian government has hidden evidence that incriminates the captain, including the simulator data, the broken relationship with Tim Pardi’s family, and reckless online behavior. There are other rumors that I won’t repeat here. None of this evidence proves guilt, but holding back of evidence by the Malaysians demonstrates an effort to direct blame elsewhere. The final whitewash was the attribution of the diversion to an unknown third party in the SIR.
The 737 Max’s flight computer architecture now is being designed.
https://www.businessinsider.com.au/boeing-737-max-flight-computer-redesign-delay-simulator-2019-11?r=US&IR=T
Extract, “While the fix originally focused on MCAS, there was closer scrutiny of the entire plane following the second crash, including of how pilots would respond to multiple cockpit alarms and what would happen in both common and extremely remote emergency scenarios.”
Now it will even accommodate, “what would happen if gamma rays from space corrupted data in the plane’s flight-control system – an extraordinarily unlikely scenario, but one that must be addressed to prove to safety regulators that the plane can survive virtually any possible failure.”
The old computer, “… based on an older version of the 737, is now considered antiquated.”
That will be of small comfort to those flying in the older versions.
As to the relevance to other aircraft types of the architecture and software changes needed, the Bloomberg article cited has a quote, “more recent Boeing models and Airbus SE’s jets — use three computer systems to monitor each other…”. Also it notes, “This change is an important modernization that brings the plane more in line with the latest safety technology but raised highly complex software and hardware issues.”
Aside from older models and types then those more modern are unaffected directly, though their “extremely remote emergency scenarios” (of para 3 above) might need a brush up.
Related, the Boeing/FAA assumption as to the time pilots need to take action in such instances (based apparently on an industry standard), “has been called into question” (Bloomberg). Changes there might have wider implications than just to the 737 Max, though there is no apparent relevance to MH370.
First line. For ‘designed’ please read ‘redesigned’.
@David
RE: ‘The old computer, “… based on an older version of the 737, is now considered antiquated.”
That will be of small comfort to those flying in the older versions.’
I suspect what they mean is that the ‘old computer,…based on an older version version of the 737’ was simply not up to the task of doing everything that was required of it in the 737MAX. The old computer is perfectly fine in the older versions of the 737, which don’t have the extra bits (eg MCAS) that were added to the MAX. After all, those older aircraft have been flying for years with a very good safety record.
RE: ‘Aside from older models and types then those more modern are unaffected directly, though their “extremely remote emergency scenarios” (of para 3 above) might need a brush up.’
The EMI/EMC requirements for the certification of new designs are far more stringent than those that were applied when older designs such as the B737 were first certified. Being a derivative of an older design, the MAX was probably able to escape the new requirements during its certification. I think you’ll find that more modern aircraft will already comply with the requirements that are now being applied to the MAX.
@Andrew. While the 737 has a good record, from these articles I think it would be reasonable all the same for the public to question whether the one computer arrangement, without a cross-checking capability, is suitable any longer for other more recent models.
While the 737 design perhaps does not have the same need as the fly-by-wire type, the issue could be whether earlier model upgrades led to increase in the need for cross-checking but only now has that become apparent, because of the MCAS problem.
An added question is whether some of the experience gained from the recent extensive testing of remote scenarios might too have some bearing retrospectively on this one computer issue.
About EMI/EMC, while the fly-by-wire aircraft again are more vulnerable, the articles implied that the Max is now to meet the most stringent requirements. If so, that begs the question as to why the Max escaped those earlier – and thence whether earlier models with their incremental changes escaped likewise.
I do not know whether a record of a good safety will be enough by itself, in the light of the extensive redesign of the Max now unearthed as required.
@David
It’s my understanding that a MAX FCC does include two processing channels with output comparison as a means of protection against bit errors as may be caused by random noise effects. The constraint remains that only of the two FCCs is normally active.
It seems that, at a broad conceptual level, it was accepted that a flight controls intervention could be implemented in an aircraft that was not built with an avionics architecture that could safely support it. It remains to be seen how a solution will be implemented. The fleet of useless airframes continues to grow.
@David/Andrew
I find the arguments on computer aiding humorous. Similar to the ABS introduction.
https://www.thetruthaboutcars.com/2006/08/killer-abs-abs-braking-increases-rollover-risk-by-51/
I am an avid motorcycle racer and affectionado. I have not bought a bike since 2009 because after that date they all came with ABS.
I am glad my better half has ABS on her bike, but it is certainly not for me.
At the end of the day there is no substitute for a skilled pilot – aircraft, car, motorcycle, … A computer cannot be a substitute.
@Victor
I’ve always wondered how hijackers could have gained access to the cockpit. Intrusion into the E/E bay and opening the cockpit door is one possibility.
But what about Social Engineering?
For this to work, the pilot would have had to know the perps. Did ZS know the IFSO’s who hijacked MH370?
The IFSO’s may have originally been deployed in Feb 2014 during the Sochi Olympics, and ZS may have made his acquaintance with them. This explains the simulator, and Malaysia’s reluctance to release the data.
@Don Thompson. Thanks.
I’ve never been convinced that if the perps had access to the E/E bay and a maintenance terminal plugged in, cockpit access would be necessary.
@CanisMR: IFSOs? What explains the simulator?
@CMR
I doubt the aircrew are going to allow unauthorised visitors they know socially into the cockpit. Airlines don’t take kindly to that.
Your conjecture that rogue IFSOs carried out a hijacking while a possibility, seems unlikely to me.
Anything about the disappearance of 9M-MRO that requires a conspiracy between two or more individuals I tend to discount as being highly unlikely.
I think the PIC was a troubled individual and the simplest and unfortunately least interesting explanation is that he acted alone.
Is it worth the energy to explore other avenues of explanation if the evidence tends to point one way?
@Tom O’
think the PIC was a troubled individual and the simplest and unfortunately least interesting explanation is that he acted alone.
I have trouble reconciling that conclusion with the Malaysian SAR response. How did Malaysia know very early on that a diversion was in progress?
@Victor
Seems to me we have a growing ISAT data denial movement, which is presumably outgrowth of denial of pilot involvement. If ISAT data is accepted, it is harder to refute pilot involvement. Also to really grasp ISAT data you need to work with it, and even work with flight sim to see how it works.
So many would rather see more attention given to eyewitness reports, which they feel are being ignored. Of course there are many conflicting eyewitness reports, so that results in a wide variety of end points, depending on what eyewitness report(s) is chosen. Generally these folks feel the crash was after IGARI, Vietnam etc.
The denial movement sees Malaysia as holding back evidence that the ISAT data is wrong and that the pilot is innocent, in order to let the world believe the pilot may have done this. Scapegoat.
Those who feel MH370 may have indeed been pijacking feel Malaysia is holding back incriminating evidence. So at least there is consensus that Malaysia is holding back info.
Various implications, but the inability to find MH370 is claimed as proof the ISAT data is wrong.
@TBill: The most reliable data sets we have (in no particular order) are the civilian radar, military radar, and satellite data, together with the results of the drift and fuel consumption models. Some choose to disregard one or more of these data sets in favor of witness reports (which in themselves are not consistent), rumors, hunches, and falsehoods. As you say, the justification used to dismiss the reliable data sets is the failure to find the debris field, without an understanding that data sets cannot precisely locate the plane without invoking other assumptions.
If we’ve learned anything, it’s that intelligent discussions about MH370 do not occur on Facebook and Twitter.
@DennisW: Can you please state explicitly what actions lead you to believe that the Najib administration was aware of a diversion by the pilots soon after the disappearance? Was it simply the delay to start the SAR operation?
@Victor
cut-paste from ICAO summary:
The RO had communication with the RCCs in Kuala Lumpur and Canberra, which expressed concern about the management of aircraft within the Australian Search and Rescue Region (SRR). The search aircraft appeared to be under the direction of high Malaysian officials, and not the RCCs.</b) It was not clear that the States involved were actively searching within their airspace under the provisions of Annex 12 paragraph 5.3.1 i). Moreover, the RCCs were reportedly receiving information only from journalists or via ‘diplomatic channels’.
https://www.icao.int/APAC/Meetings/2015%20APSARTF3/WP05%20ICAO%20Brief%20on%20the%20SAR%20Response%20to%20MH370.pdf
@DennisW
I don’t think they knew at all initially. Directing the SAR effort towards the last known location of the plane is not unreasonable, given what little was known at the time, even if it was thought the plane was still apparently flying for some time after loss of contact.
@DennisW: ICAO admonished Malaysia for allowing “high Malaysian officials” to intervene in the search efforts. Why does this lead you to believe that the Najib administration was aware of a diversion by the pilots soon after the disappearance? I attribute this meddling to be a symptom of trying to control the political damage.
@Victor
“If we’ve learned anything, it’s that intelligent discussions about MH370 do not occur on Facebook and Twitter.”
Admittedly I have stepped into the Twitterverse to sample opinions.
The other big conclusion I see, aside from eyewitness reports, lots of credibility is being given to debris reports, sateliite photos etc. Like the eyewitness reports, the unconfirmed debris reports are all over the globe almost, so that leads to wide mix of crash location theories.
However, offshore Vietnam is one focal point, with oil rig worker MacKay’s eyewitness sighting being given credibility. Yes requires a belief that the MH370 radar data at IGARI has been falsified. I should add radar-data denial to the ISAT denial.
@Victor
What is polically damaging is a diversion not an aircraft failure. Do you recall the president or PM of any nation getting involved in the details of S&R unless there was terrorist threat associated with the dissappearance or diversion?
@DennisW: We’re not getting anywhere. I attribute the meddling to incompetence and the embarrassment due to the disappearance of the plane, the ineffectiveness of military defense systems, and the potential involvement of the crew. You think the meddling is a symptom that the Najib administration was negotiating with the diverters during the flight. What is clear to you remains only a possibility to me.
I don’t know if the leader of another nation has ever intervened in an SAR operation. I do know that the facts around this case are much different than any other case.
@Victor
I do know that the facts around this case are much different than any other case.
Yes, but those facts did not emerge (in a public domain) until well after the flight terminated. There lies our disconnect.
The question of whodunnit and why is surely of interest, but the discussion here lacks a connection between the persons or persons who did it and the behavior of the plane after the diversion in each instance.
Is there any difference in the end point for each of the scenarios?
For the negotiations-like scenarios, the path of the plane might have many changes in flight parameters. Other scenarios may have little little or no pilot intervention.
Does any of this help us better understand the technical analysis that has been done so as to differentiate between 180T, 186T, 189T, a dive, a glide or whatever? At least we should try to form a grouping of the end points based on the specific scenarios.
In my mind, we are not making much progress right now. Richard has dismissed a number of proposed paths based on Dr.Bs fuel modeling, but we have yet to see an actual proposed path from start to finish for the various alternatives.
I have studied the 186T path most extensively and can provide a path in 15 second increments from NILAM including guidance as to how to select the FL and Mach speed. My thesis is that the plane maintained a constant Mach speed for these paths. I think that I can come close to a similar data set for the 189T model.
But I do not have a coupled fuel model to work with.
If anyone wants my data, let me know, but expect a delay of several days as I am in transit….
Sid Bennett asked: Is there any difference in the end point for each of the scenarios?
Without a doubt if we understood the motivation for the diversion (which is what much of the discussion centered around) we’d prioritize paths differently. For instance, a scenario with an ongoing negotiation makes paths that include hold patterns more likely, and also would favor paths that incorporate paths towards airports. That was the genesis of scenarios like the CAPTIO path and the path I proposed that incorporated a turn towards Cocos Island.
You say In my mind, we are not making much progress right now. And on that basis, you propose the same path that many of us proposed back in July 2014, without regard to fuel and drift models because you have decided to not use them. How is that progress?
The work undertaken by Bobby, Richard, and me is nearing completion. Without a doubt, it will be the most comprehensive and precise path reconstruction effort to date, and includes many factors others have chosen to ignore.
@Victor
On Feb 7,2014 a Pegasus airline leaving Eastern Ukraine was ‘hijacked’ by a passenger who demanded the release of anti-govt. protesters, and wanted the aircraft flown to Sochi,Russia where the Winter Olympics 2014 opening ceremony was underway. The pilots switched the transponder to 7500, and supposedly deceived the hijacker into believing they were on their way to Sochi, but instead continued on their journey to Istanbul where the he was ‘apprehended’ without much fuss. While the aircraft was in Ukrainian airspace, it was shadowed by Russian jets, then NATO jets took over in Turkish airspace.
Every detail about this incident screams of a false flag operation conducted by the Russians to test hijacking interception readiness during an event of great importance to the Russians. Remember, they cheated their way to the top of the medals standing.
In the opening scenes of a 2016 biopic on the leader of Russia who was standing for re-election, this incident was retold with dramatic flair. “A hijacked aircraft was heading to the opening ceremony, and the leader was informed. He requested the standard operating procedures to be implemented, including a shoot-down if necessary. Jets were scrambled from Crimea to escort the aircraft away from Sochi.”
Why is this relevant to MH370?
A cursory glance at ICAO documents clearly show that high on the list of targets for terrorists are large-scale sporting events such as the Olympics. During the 2012 Euro soccer tournament held jointly by Ukraine & Poland, a Polish security threat assessment identified among other things, ‘Plane Crashes’ as one.
ZS flew MH150 to Jeddah, Saudi Arabia on Feb 4, 2014. His flight simulator had a session on Feb 2, 2014, a flight up the Malacca Strait, and then into the SIO. Is this a coincidence?
Were there IFSO’s on board MH150?
@TBill
Very few people are calling into question the ISAT, or other data for that matter. What is being called into question is the unwillingness to overlook ZS’ personal foibles and willingness to attribute motive to him for this incident, as well as the unwillingness to look at the other data that point in a different direction for investigation.
BTW, the Kiwi oil rig worker’s description of what he saw on Mar 8 strongly suggests that a military aircraft had released an incandescent flare floating down by parachute. They were searching for something in the ocean. Was it the debris of MH370, which they expected was there, off Vietnam?
@VictorI
So far, the areas that have been proposed that have been considered the “most probable” have been searched without result.
Part of this situation is the serial nature of this quest where information has become available over a period of time. Another part is the absolute refusal of some to consider the glide scenario.
Will you consider the glide scenario for the 180T path? If you consider it to be improbable, on what basis? If there was a skilled pilot at the end, a glide is the most probable outcome.
Will your study include a full fuel analysis for the 186T path, without a descent near the FMT?
Perhaps all of this will become clear when you publish, but until then we are just spinning out wheels.
@DennisW
I reviewed the MAS and Hishammuddin Twitter posts for 7th-8th of March. Two accounts are associated with ‘Hishie’, @H2Ocomms, apparently updated by his communications team, & his official personal account @Hishammuddin2O.
Twitter provides timestamps for each post, perhaps as good as is available at this stage for a timeline of Hishie’s actions.
MAS made its public statement at 0724 (relayed via social media at 0812/0813, all times MYT on 8th March).
At 0750 Hishie tweeted good wishes for World Women’s Day, at 0816 he tweeted a family pic.
At 1003 Hishie’s first MH370 tweet appeared stating that he was on his way from Janda Baik*. He tweeted two further MH370 related msgs at 1023, concerning mobilisation of various agencies & the armed services for a search, before stating at 1039 he was making his way from Janda Baik to the Flight Mgmnt Bldg.
@H2Ocomms took over with a flurry of tweets 1356, 1357, 1400 & 1403 for his arrival at the crisis centre & meeting with MAS & DCA. Two tweets, 1439 & 1445, with images of a press conference. Another tweet at 1550 depicting a conversation including Liow and the Chinese ambassador.
[*] Janda Baik refers to Institute Latihan Memperkasa Ummah, the UMNO leadership resort, where Najib, Hishie, and other UMNO politicos were in conference on 8th March.
It appears serendipitous that the governing party’s high officials were all to be found at the same place on the morning of Saturday 8th. Hishammuddin drew (was given) the short straw to be the face of Malaysia Inc’s response to MH370. As for knowledge prior to, say, 0830… I’m not convinced.
@CMR wrote “the Kiwi oil rig worker’s description of what he saw on Mar 8 strongly suggests that a military aircraft had released an incandescent flare floating down by parachute.”
It doesn’t suggest anything of the sort.
A more likely explanation for what he saw was the landing light of a helicopter enroute to another offshore facility, a semi-sub rig or FPSO either north or south of his location (approx 230km east of Con Son island).
@Don T
Hishammuddin drew (was given) the short straw to be the face of Malaysia Inc’s response to MH370. As for knowledge prior to, say, 0830… I’m not convinced.
So “Hishi” embarked on damage control (Victor’s description). Why? What damage was there to control at that point, if the diversion scenario was not known ? The Malaysian response was clearly defensive and tightly controlled. Why? You are ignoring a major red flag, IMO.
@Sid Bennett: Please go back and read my comments. I have never said that we should not consider a glide. What I have said is that a dive-glide-dive scenario seems less likely than a dive with no glide, in much the same way that straight paths are more likely than paths with many maneuvers. However, if the debris field is not close to the 7th arc, I believe it is farther from the arc due to a glide. For now, what I am not recommending is we search further north along the 7th arc.
@DennisW
The lack of a coordinated response to MH370’s disappearance by various Malaysian government agencies was evident from the start and various contradictory statements by the Director-General of Malaysia’s CAA early after the disappearance didn’t help matters. Would it not be reasonable for the government to appoint a senior minister as the frontman in an attempt to control the narrative and limit any further damage to the government? That might have been seen as necessary even if the government had no prior knowledge of the diversion.
@victor
For now, what I am not recommending is we search further north along the 7th arc.
That is a very serious mistake, IMO.
Suspicious that all senior UMNO figures were safely cloistered away in a party retreat compound on the night of Anwar’s sentencing in the first place. They were expecting trouble of some kind
@DennisW,
One could also attempt to put a timeline for each contributor to the search. The Malaysian Coastguard/MMEA, TLDM/Navy, TUDM/Air Force. Then the neighbouring & wider international contributors Thailand, Indonesia, Singapore, Viet Nam, Australia, China, US.
The ICAO SAR Working Group report did state that DCA lacked SAR trained staff for the RCC. If DCA did not have those staff, no MY organisation did as the RCC was their responsibility.
I’ll suggest DCA had come to realise the gravity of the situation, that playback of their own primary radar had shown that the turnback had occurred. That Azharuddin realised DCA was, effectively, out of its depth and had to escalate upwards. Ministry of Transport was the escalation route and the transport portfolio was then also held by the Minister of Defence. I’d guess DCA escalated to MoT around 0830, just as MAS issued the statement confirming that contact with MH370 had been lost.
@Don Thompson
@DennisW
The following report, presented by Malaysia at the same ICAO APSAR meeting as the Secretariat’s report that Dennis quoted, provides further background (no doubt sanitised!):
https://www.icao.int/APAC/Meetings/2015%20APSARTF3/WP06%20MH370%20SAR%20Operations%20and%20Lessons%20Learnt%20(Malaysia).pdf
@CanisMR
…above I was not suggesting that you personally deny the radar and ISAT data.
Rather that is a common postion on Twitter. It has always been a side-interest of mine why people deny the apparent pilot involvement in MH370, even going back to the initial CNN coverage.
What we have now is many on Twiiter, and other forums, proclaiming a great conspriarcy. They say the radar/ISAT data was falsified by USA and others to cover up a henious international crime, and they say there is definitive proof that the aircraft actually came down near the SCS (offshore Vietnam leading spot), and that this truth was hidden from the public.
In some ways, the conspiacy theories are “justified” because Malaysia is not addressing them.
For example, let’s say early on, working with FBI, there were some answers to what eyewitness MacKay might have seen, or why there was a low flying aircraft over Kota Bharu (civil primary radar should show?). The pubic has not been given those answers, so some people use the vacuum of open communication as ammo say the denial of eyewitness reports is defintive evidence of cover-up, and that the radar/ISAT data was falsified.
In the absence of gov’t disclosure, perhaps those of us who discount the eyewitness reports, have a side job to explain why we are discounting that data, including speculation on what the person might have been looking at (which in some cases the witness might have fabricated the story). @DonT above is taking a crack at explaining MacKay’s sighting, which I appreciate.
@ All,
dicthing is the most probable end of flight according to a detailed structural analysis of the flaperon performed by CAPTIO.
The latest findings on this structural analysis of the flaperon have been presented at the address to the RAeS Brussels last Sept.
The link to the video is now on http://www.mh370-captio.net
The video includes 3 parts:
1- A more detailed analysis of the trajectory
2- The findings of the structural analysis of the flaperon
3- Q&A Session
Enjoy the viewing 🙂
@Jean-Luc Marchand: Thank you for sharing the video. I enjoyed it, and appreciate your commitment to making important technical contributions. I encourage all readers here to watch the video.
On the topic of the finite element analysis of the flaperon, you determined that the observed damage is not consistent with a separation in flight, which you believe would have damaged the leading edge. However, implicit is the assumption that the leading edge would have impacted the water first. For an object with the flaperon’s mass distribution and no aerodynamic forces, I believe that is correct. However, when aerodynamic forces are considered, I think the result would be quite different. Have you attempted to study how the flaperon might fall in air?
I also found it interesting that one of the arguments for searching further north was that previous searches in the SIO failed. However, you also propose that a controlled glide with an attempted ditching is likely. It would seem that if a long glide did occur away from the 7th arc, it could very well explain why the previous searches failed.
@Jean-Luc Marchand: The flaperon and flap segment witness marks and damage patterns indicate in-flight separation was indeed likely. The flaperon was a relatively light weight object with a large flat surface area. There is no way it would descend like a knife edge. Instead, it could only have descended like a leaf falling from a tree. Basic physics.
@Jean-Luc Marchand:
Thanks for the well presented video.
The RAT was probably not deployed following immediately the diversion, as the SATCOM can be disabled by isolating the LH transfer bus. The efficiency of the RAT at circa FL430 is not good!
The apparent rapid descent evidenced by the final BFO, was more likely in anticipation that the APU would run out of residual fuel not long after the FE of #1 engine. The reason for this descent could be to get the RAT deployed below FL200 in order to safely extend a proposed glide.
My proof reading is not good!
following immediately should be ‘immediately following’.
@Barry Carlson: The RAT performs perfect well at flight levels higher than FL200, as long as the indicated airspeed is high enough (great than around 115 KIAS).
I found the video presentation interesting too. Of course, it raises a number of questions, and there are some points that I find questionable.
I was a little surprised that there was no question regarding the motive for aiming the flight towards Christmas Island. Then, if everything else was planned meticulously why exhaust the fuel unexpectedly.
Actually I think the flaperon water impact simulations were simplistic, because it is hard to see how the trailing edge could drag in the water in that manner with those massive engines immediately in front of the flaperons.
Notwithstanding the assumptions and the unanswered questions and the gaps, I think the video is a useful summation of many of the facts.
@Victor @all
Re: Pulau Perak eyewitness reference – finally found
I keep asking if there was a Pulau Perak eyewitness, finally found with a little help, that reference is in RMP report Appendix K2 the map figure shows an eyewitmess at PP. Wonder what altitude the person saw?
Re: Captio
Yes I agree strongly with electric power off at IGARI, and I theorize the purpose was to cut off the Flight Data Recorder as well as SATCOM. Perhaps possible to avoid RAT deployment by keeping L XFER bus ON. I tend to agree with Victor that A/P is back on by Penang for the smooth curvature, so maybe APU on or something like that.
I liked the Captio discussions of conflict with the conspiracy theorists, which seems to me a lot of the conspiracy theorists come from France (pls excuse my bias) but I am very appreciative that the French “engineers” at Captio are data-centric. What I woud say is, we engineers would not be working with the data if we thought it was bad data.
Thanks CAPTIO,
Thanks for highlighting that your route is one of possibly 1000s that can fit the INMARSAT data. I find the route shown just far too contrived.
A simple mechanical failure(O2 bottle rupture), massive electrical damage and unconscious pilots fits just as neatly. A Direct mode, no autopilot, meandering flight fits too. ELMS load shedding main bus power then reinstating at 1825.
If we can agree that the 7th arc is in the right place, then let’s persuade OI to search it.
@TBill said: Yes I agree strongly with electric power off at IGARI, and I theorize the purpose was to cut off the Flight Data Recorder as well as SATCOM. Perhaps possible to avoid RAT deployment by keeping L XFER bus ON.
It would be extreme to cut the left and right AC busses and transfer busses. And disabling the ACARS was accomplished without powering down the SATCOM. My best estimate is the left AC and transfer busses were powered down, which removed power to the CVR. Later, power was restored to overwrite what was recorded before the power down. The autopilot was therefore always available, and the RAT did not deploy until fuel exhaustion.
@Victor
If your proposed IGARI electric config cuts off DFDR too, which I think it might, then I probably accept your proposal.
@TBill: No, I am proposing that rendering the CVR inoperable was more important than the FDR. After all, it would be much more incriminating. Also, it is not possible to cut power to both the CVR and FDR from the cockpit and use the autopilot near Penang.
@TBill
Why would the person on watch duty on Pulau Perak take a note of a commercial airliner at say FL400 ?
As I noted upthread, the plane could have been configured to be more visible and thus appeared to be lower.
@flatpack
Thank you for asking Re: Pulau Perak MH370 altitude
Malaysia’s final report (Safety Informstion Report) says MH370 was at about 5000-ft at Pulau Perak by radar. Assuming Pulau Perak Island itself is about 1000-ft tall, that would be a “haircut” for the eyewitness. So I would like to know if the eyewitness (presumably military outpost?) got a haircut or if MH370 was, as you say, at nominal FL400. We are really short on altitude history after Penang, and it could help figure out what was going on, if it was low.
@Victor
You are correct we are still in some disagreement. Above you said the key words “transfer buses” powered down, but I now see that you did not intend to imply both XFER buses, which would give us the RAT deploy anyways.
I feel the CVR could be fixed later or otherwise tampered with. He wanted to stop recording the intentional depressure steps, in my theory, if it was fast and furious he could get the job done by Penang and still get A/P back on. Alternately maybe low altitude at Pulau Perak means he was repressuring there…not sure.
@flatpack: Perhaps it’s because it is within WMD420, which is designated a dangerous area due to “RMAF Supersonic Jet Training and Live Firing”.
@TBill
I agree with Victor, that the Cockpit Voice Recorder was cleaned of any incriminating evidence.
Here is a link to all the Boeing 777 Systems and their electrical power source:
https://www.dropbox.com/s/46ngm51asalcfac/Boeing%20777%20Electrical%20Power%20to%20Systems.png?dl=0
Most systems are redundant and have multiple power sources.
I have highlighted the 7 systems, which are powered from the 115V AC Left Main Bus, 115V AC Left Transfer Bus, 115V AC Left Secondary Bus and 115V AC Left Standby Bus.
Out of these 7 systems, there are only 3 that do not have a circuit breaker in the cockpit overhead panel P11 including the Satellite Communication System and the Cockpit Voice Recorder.
The purpose of switching off the 115V AC Left Transfer Bus at diversion was to stop the Cockpit Voice Recorder.
The purpose of switching on the 115V AC Left Transfer Bus at ca. 18:23 UTC when all was quiet was to restart the Cockpit Voice Recorder and make sure there was nothing to record. In 2 hours the Cockpit Voice Recorder is clean.
The PIC would have known the Satellite Communication System was rebooted, but did not know that the aircraft could be tracked using BTOs and BFOs. The goal was to clean the Cockpit Voice Recorder, the Satellite Communication System was viewed as unimportant.
@Richard
That sounds right to me. Good post.
I have doubts about cabin depressurization because the BFO at 18:25 was simply spot on. Plus that, in my preferred scenario the PAX were kept alive.
@TBill
Re: ‘Assuming Pulau Perak Island itself is about 1000-ft tall …‘
I don’t think that it is that high, Bill. I haven’t been able to find a topographical map of it but based on photos I’d say that the highest point on the island is about 200-300 feet above sea level.
@flatpack
Re:’ … the plane could have been configured to be more visible and thus appeared to be lower.‘
The wingspan on a B777 is about 215 feet. At 5,000 feet that wingspan looks like 43mm viewed from 1 metre (147.8 arcminutes); at 40,000 feet it looks like about 5mm viewed from 1 metre (18.5 arcminutes). I can’t imagine any ‘configuration’ that would give rise to the appearance that the aircraft was that much lower than it was.
And bear in mind that it was a moonless night, observing an overflying aircraft at 40,000 feet would have been highly unlikely unless it had at least its navigation lights active. Even then it might be a stretch to see it without the anti-collision beacons being active.
At 5,000 feet with no external lighting would you be able to make it out from just the effect of the interior lighting? I don’t know.
In response to TBill & Mick Gilbert
According to the Admiralty List of Lights the altitude of the light on Pulau Perak is 128m (per NM, 5th col shows elev in metres). The light is reported to be mounted on an 18m tower. Ground level: 110m/360ft.
Concerning the likelihood and veracity of eyewitness reports. On one hand, discussions above involve power sources being isolated from busses, outcomes from those acts include the aircraft external lighting and much of the cabin lighting rendered inoperative. No external lighting makes visual location… tricky.
The ‘Pulau Perak eyewitness’ report requires stronger verification than an annotation on a Google Earth placemarker. The placemarker might simply be a bad cut-paste-drag-edit of the placemarker noting the eye witness report near Kota Bharu. Circumstantially, one has to ask why would the TDM/Army garrison be interested in noting a fixed wing aircraft, and as Mick notes, how would they achieve recognition on a moonless night? The garrison’s role is territorial protection of the rock which lies beyond the 12NM territorial seas limit from the Kedah coast.
@Don Thompson
Re: ‘On one hand, discussions above involve power sources being isolated from busses, outcomes from those acts include the aircraft external lighting and much of the cabin lighting rendered inoperative.‘
Is that right, Don? I thought that most of the cabin lighting is powered by the 115V AC Ground Service bus, which is powered by the Right AC bus in flight. So depowering the Left AC and Transfer Buses should have at best a very limited impact on cabin lighting.
Similarly, depowering the Left AC and Transfer Buses should have a limited impact on the external lighting; it would take down the left and tail nav lights and the wing and tail strobes (I think). The upper and lower beacons, the right wing nav lights, and the logo lights that illuminate the vertical stabiliser should all remain operational.
That said, the BEACON, NAV, LOGO and WING lighting can simply be turned off from the flight deck using the relevant switches on the P5 overhead panel.
@Mick Gilbert asked: At 5,000 feet with no external lighting would you be able to make it out from just the effect of the interior lighting?
If a B777 flew over your head at 5,000 ft, it would be quite loud, and combined with whatever interior lighting and obstruction of stars, I think it would be easy to identify as an airliner. It would be much harder to visually identify at cruise altitude, but since airliners don’t typically fly over Pulau Perak, the sound might have helped identify the aircraft.
@DonT
Considering the disinformation campaign suggesting that the radar data has been faked, the Pulau Perak eyewitness is potentially important. I feel like at one point we heard more details about that sighting, now I am trying to remember that.
@TBill: Anybody that dismisses the veracity of the civilian and military radar data won’t be persuaded by an eyewitness. To me, the possibility of an eyewitness is more of a curiosity.
@Victor
Yes it is interesting re: Pulau Perak.
I live under a high altitude NY-to-Charlotte flight path, and certainly I can see the aircraft with the lights. Lights off is probably a different story, but of course I cannot get that opportunity.
It is interesting, looks like the jets are directly over our house but on FR24 I can see they are a mile or so away usually. With the newer FAA rules allowing more freedom to the jets, due to less noisy engines, we also get a fair amount of DCA traffic overhead so we get a variety of altitudes.
@Mick Gilbert,
I should’ve been more explicit: my suspicion is that, in addition to isolation of the L AC Bus and consequent removal of power to the AES, the R AC Bus was also isolated. Absence of supply on both AC buses has an impact on the cabin lighting and also the Cabin Services System.
Other interests
I’m not persuaded that it was necessary to isolate power from the CVR. If alternate outcomes for the diversion were anticipated beforehand, one being a landing, the pilot held the option to delay that landing for two hours while the CVR overwrote, or to land promptly with the CVR bearing witness to whatever agreement was concluded with whoever. In the case of a flight ending 7hrs after the diverson, the CVR is probably irrelevant.
Low flying aircraft…
My location is close to EGAA and EGAC. In the last short while I have checked on an Airbus A319 and a Bombardier Dash-8-400, both passed close during descent into EGAC at approximately 5000ft. The Dash-8 was more noticeable, mainly because of its turboprop engines. It is a clear, moonlit night. Granted, this is an anecdotal observation but even at 5000ft, during descent, and without external lighting it cannot be assumed that an observation is certain.
@Don Thompson: I believe the scenario that caused the captain to stop the CVR was the possibility of shootdown before getting to the Malacca Strait. That was no longer a concern when the aircraft left the Malaysian FIR.
Where I live, it’s quiet at night, and planes overhead at cruise altitude can be heard. At 5,000 ft, any kind of aircraft can easily be detected. I don’t doubt that at an aircraft flying at night over Pulau Perak at cruise altitude could be heard and detected.
@ all – Couple of related news in the past week for readers who might have missed it.
https://www.reuters.com/article/us-malaysia-aviation-usa/u-s-aviation-authority-downgrades-malaysias-air-safety-rating-sources-idUSKBN1XL12O
https://www.thestar.com.my/news/nation/2019/11/10/mh360-air-turn-back-due-to-landing-gear-issue-says-mas
@Don, you said “my suspicion is that, in addition to isolation of the L AC Bus and consequent removal of power to the AES, the R AC Bus was also isolated”. That’s interesting. Why do you suspect that? And what do you think was restored/not restored at the 1825 login?
@Andrew
@Jean Luc
@all
Re: CAPTIO’s RAT Idea
Here is my question, regarding the fact that CAPTIO has radical suggestion of all power off at IGARI, so they propose flying manually with RAT deployed with power back at 1825.
>>O2 Masks- Is it possible that cutting all power like that could stop the O2 masks from dropping down upon depressurization? In the past I think we said there is no way to stop the O2 masks from CockPit due to Back-Up batteries, but I do not know if we considered this more radical idea. Conceivablly there might be no pressure reading to trigger the nasks (or would there still be?).
I do not think CAPTIO gives us a rationale for this proposal vs. Left BUS Isolation. But it could be consistent with my deniability hypothesis, to cut off everything at IGARI, including CVR, DFDR, SATCOM, etc
@TBill
RE: ”Is it possible that cutting all power like that could stop the O2 masks from dropping down upon depressurization? In the past I think we said there is no way to stop the O2 masks from CockPit due to Back-Up batteries, but I do not know if we considered this more radical idea. Conceivablly there might be no pressure reading to trigger the nasks (or would there still be?)”
The passenger oxygen system (including the pressure sensors) is powered by the standby power system. That system will be powered by the RAT or the main battery if all other power sources fail. It is not possible to stop the automatic mask deployment by cutting the AC power supplies.
@Andrew
Thank you!
Then my understanding is the only way to stop the O2 mask drop down would be to switch off certain circuit breakers in the MEC Bay.
@TBill: I see no evidence that the autopilot was ever disengaged. In fact, considering the workload on the pilot during the turnback (turn off transponder, turn off exterior lights, power down left bus, start the turn onto a new course, enter new waypoints, depressurize, climb, all the while worrying about a forced entry into the cockpit), and considering the airmanship required to fly at altitudes and speeds near the performance limits of the aircraft, it makes no sense to manually fly.
In order to use the autopilot, either the left transfer bus or the right transfer bus was powered. My guess is it was the right transfer bus with the power, as the left main bus was unpowered, as evidenced by the SATCOM power down. That would mean that power to the FDR was not interrupted.
@All
On another subject, it has come to light today that there were regular telephone calls between Ukraine separatists and Russia that went much further than just military help.
Andy Kraag from the MH17 Joint Investigation Team has today published recordings of almost daily telephone calls between Putin’s aide Wladislaw Surkow and Alexander Borodaj the 2014 leader of the Donetsk Republic, that show the Russians would take over command of operations in East Ukraine.
Not only was MH17 shot down with a Russian BUK Ground-to-Air missile:
https://www.dropbox.com/s/t65xzx4ksvxi2uz/MH17%20Russian%20BUK%20Missile.jpg?dl=0
It appears that the MH17 cockpit was riddled with bullets in an Air-to-Air attack shortly beforehand:
https://www.dropbox.com/s/h2i40ylk4y3vzt4/MH17%20Cockpit%20with%20Bullet%20Holes.jpg?dl=0
@Richard
RE: ”It appears that the MH17 cockpit was riddled with bullets in an Air-to-Air attack shortly beforehand…”
The Dutch Safety Board report found:
”The high-energy object damage was not caused by an air-to-air gun or cannon because:
• the number of the perforations was not consistent with gunfire, and
• air-to-air gun/cannon fire does not produce fragments with the distinctive forms that were found in the wreckage and in the bodies of three of the crew members.”
Has something new emerged from the investigation?
RE: “It appears that the MH17 cockpit was riddled with bullets in an Air-to-Air attack shortly beforehand…”
I remember reading something at the time, where it recorded that the BUK missile warhead was filled with shrapnel. The warhead is detonated by proximity detection, and the shrapnel is released at that point.
@Barry Carlson
Two more quotes from the DSB report:
”The Buk system’s missiles (the 9M38 and 9M38M1 missiles) carry a 70 kg high-explosive fragmentation warhead, composed of a high-explosive detonator surrounded by layers of pre-formed fragments. The 9N314 and 9N314M warheads are composed of two layers of pre-formed fragments. The inner layer of pre-formed fragments in the 9N314M warhead is composed of bow-tie shaped fragments together with square shaped ‘filler’ fragments. The outer layer consists of larger square shaped fragments…”
”The total number of pre-formed objects in a 9N314M warhead is, according to the Russian Federation defence group, JSC Concern Almaz-Antey, between 7,000 and 8,000.”
@Andrew;
Thanks for the refresher.
When Bellingcat got on to back-tracking the BUK launcher and the low loader used to transport it, I spent some time pinning down the time of day and locations of many of the images that appeared on Ukraine and other websites. All very interesting, but as far the DSB were concerned, their investigation on behalf of the Malaysian authorities was to establish how and why MH17 came to be scattered over a large area in SE Ukraine.
Getting clearances over potential war zones became a thing of the past.
@Barry Carlson
RE: “All very interesting, but as far the DSB were concerned, their investigation on behalf of the Malaysian authorities was to establish how and why MH17 came to be scattered over a large area in SE Ukraine.”
The DSB investigation was actually conducted on behalf of Ukraine, not Malaysia. Ukraine had responsibility for the investigation under ICAO Annex 13, but the Ukrainian authorities formally delegated that responsibility to the Netherlands about a week after the accident.
In accordance with Annex 13, the purpose of the DSB investigation was to establish the causes of the accident and to recommend safety actions to minimise the possibility of a future occurrence. It was not the DSB’s job to determine who was responsible. The criminal investigation is being conducted by the Joint Investigation Team, whose members include police investigators and judicial authorities from the Netherlands, Australia, Belgium, Malaysia and Ukraine.
@Andrew, @Barry Carlson
Many thanks for correcting the MH17 picture.
The BUK fragmentation warhead is obviously responsible for the cockpit damage and not air-to-air gun fire. I was a victim of poor reporting in the media.
The only new thing that has come out regarding MH17 is recordings of telephone calls at the time between the Ukraine separatists and Russia, that clearly show that Russia had taken over command of the situation in eastern Ukraine and the co-ordination between the Ukraine separatists and the Russian Military was closer than had previously been thought to be the case.
@Victor
With reference to the side discussion of possible connection between MH17 and MH370, do you see anything here that makes a connection? Presumably we’d be looking for selective target of MAS jet to punish Razak for MH370 or 1MDB activiites. Of course we do have the Razak relative on MH17.
@TBill: I see many possibilities of links between MH370 and MH17, but with no solid evidence, I prefer to consider them in private. Of course, unlike some, I’m not trying to push a book.
@VictorI
Don’t you think it’s remarkable that the chain-of-command for MH17 shootdown may go all the way to the Kremlin, bypassing the rebel commanders in E.Ukraine?
I think it’s also remarkable that the normally chatty Bellingcat is keeping quiet about this revelation.
You gotta admit, despite Jeff Wise trying to sell his spoofing theory, he may be right about the culprits for MH370!
@TBill
Watch the following video on Youtube, between 6.15 – 10.00.
https://youtu.be/CCFs0PtzeVE
Now remember, the Pegasus incident happened Feb 7, Sochi Olympics opening ceremony.
MH370 happened Mar 7, opening ceremony of the Sochi ParaOlympics.
@CanisMR
MH370 dissappeared on March 8 in Malaysia – a significant date in Malaysian political history.
https://www.malaysiakini.com/news/92049
I am more inclined to believe the MH370 timing was related to Malaysian politics, and that there is no connection between MH17 and MH370.
Mick Gilbert
“I can’t imagine any ‘configuration’ that would give rise to the appearance that the aircraft was that much lower than it was.”
Well, I have.
The example I gave upthread on October 11th at 11:13am was that of a U2 but the principles are the same:- lights-on and descend holding an attitude that holds the focii of forward/downward facing lights where you want them.
I suspect that ‘bright equals close’ comes into it somehow. After all Jupiter isn’t close but seen over your cowshed it may appear to be a nearby UFO. But it’s not, it’s Jupiter.
It’s always Jupiter.
@DennisW, @CanisMR: I really don’t think Russia was responsible for the disappearance of MH370. I also think MH17 could be related to MH370. I also think it’s possible that MH17 was targeted, and not the result of a mistake.
@Victor… if not the Russians or ZS, then who else?
@CanisMR: To be clear, with all we know, I don’t see how anybody can believe that the captain was not at least partly, and perhaps solely, responsible for the diversion.
@VictorI… The French clearly don’t believe that!
@CanisMR: What is that the evidence that “the French clearly don’t believe that”?
@DennisW
2014 Sochi Paralympics opened Mar 7 at 20:14 Moscow time (UTC+3) i.e. 1714 UTC.
MH370 transponder switched off five minutes later, at 1719 UTC Mar 7. MH370 became a ‘rogue’ flight, and IFSO’s are within their prerogative to retake control of the flight to prevent it from heading towards Sochi.
@VictorI
French NoK Gyslain W mentioned in media interviews that the investigating judges don’t believe the pilot suicide theory. He reiterated this point on the MH370 France Facebook page.
@CanisMR
The opening ceremony of the 2014 Winter Paralympics took place at the Fisht Olympic Stadium in Sochi, Russia, on 7 March 2014. It began at 20:14 MSK (UTC+4) to match the time to the year.
20:14 MSK is 16:14 UTC. MH370 had not even pushed back from the gate. BTW, MYT is (UTC+8), so at 16:14 UTC it was March 8 in Malaysia.
@CanisMR
You would be correct today. You would have been correct in 2015. Russia changed the use of daylight savings time In October of 2014.
https://photos.app.goo.gl/NVQp83e1uHuTk5pU6
RE: “MH370 became a ‘rogue’ flight, and IFSO’s are within their prerogative to retake control of the flight to prevent it from heading towards Sochi.”
I’ve read some bizarre theories surrounding MH370, but really??
@CanisMR: Mr. Wattrelos has said many things. I prefer to hear directly from the French officials.
@CanisMR
I know that NoK Wattrelos is a shoot-down theoriest, and that it seems his access to confidential Boeing info and, an in general more info than the rest of us, all of which is consistent with flight to SIO, he prefers to reject that and go with shoot down theory. Which is interesting to me, because he is not the only person feeling that way. In fact I wonder if it majority opinion in some places including NoK.
But I am not aware he said the French judges said that. I am thinking that is the way he feels.
Meanwhile, in recognition of the existence of the “MH370 Thruther” movement (which I call it until they give themselves their own name) which rejects the Indian Ocean iSat and IGARI swtchback radar data, I have assembled the 6 pillars which confirm that the data that we here say is good data:
The 6 Pillars of MH370 (IGARI Switchback to Indian Ocean):
(1) Sanitized military radar multi-country w/ NTSB check
(2) Detailed raw civil radar data from MY
(3) FO cell phone at Penang
(4) eyewitness Pulau Perak
(5) ISAT 18:25 data burst exteremely consistent with radar data
(6) Debris Findings (eg; flaperon) in the Indian Ocean
@CanisMR
Sorry, I messed up my link above. The one below is better anyway, and is based at midnight in Kuala Lumpur in March 2014.
https://photos.app.goo.gl/z8vHVi45ErPjWaSg6
@TBill
I have completed over recent months a detailed analysis of your “6 Pillars of MH370 (IGARI Switchback to Indian Ocean)”:
(1) Sanitised military radar multi-country w/ NTSB check.
(2) Detailed raw civil radar data from MY.
(3) FO cell phone at Penang.
(4) eyewitness Pulau Perak.
(5) ISAT 18:25 data burst extremely consistent with radar data.
(6) Debris Findings (eg; flaperon) in the Indian Ocean.
The only analysis that came out questionable is (4) “eyewitness Pulau Perak”, as MH370 was calculated to be at FL385 (40,706 feet) at this point and not at 4,800 feet as claimed in the Malaysian SIR.
Regarding (1) the “Sanitised military radar multi-country w/ NTSB check”, the radar returns at 18:02:23 UTC, 18:05:05 UTC, 18:07:16 UTC, 18:13:36 UTC and 18:15:28 UTC, that have been deciphered from the Beijing Lido image, are subject to a degraded accuracy. Averaged over wider spans, the Military Radar data fit both (2) “Detailed raw civil radar data from MY” and (5) “ISAT 18:25 data burst extremely consistent with radar data”.
I would add that the MH370 Flight Path from diversion at 17:21:04.220 UTC to the ISAT data burst starting at 18:25:27.421 UTC, fits the Boeing 777-224ER flight performance and local weather data from the Kota Bharu (WMKC) and Penang (WMKP) radiosondes data, as well as the GDAS historic archived data.
@VictorI,
the massive cover-up we are dealing with involves, I think, the French govt. too. The French investigating judges are working independantly of the govt. which is why Gyslain W. trusts their opinion and quotes them, in contrast to the French govt which he accuses of lying. Here are possible conflicts of interests of the French govt.
– The IFSO’s on board MH370 may have been ex-Foreign Legion
– flaperon may have landed not on Reunion but on disputed Indian Ocean territory currently held by the French
– France imposed sanctions on Russia following the annexation of Crimea, but it holds onto disputed territory in the Indian Ocean, and Russia has exposed the hypocrisy of the West
@Tbill,
the reason some doubt the ISAT data towards the SIO is because they also doubt the ISAT data during previous flights of MH370 over the S.China Sea towards Beijing and back. It could have been spoofed by either MH370 itself, or the Satcom could have been turned off, while another aircraft spoofed the ISAT/transponder data and conducted surveillance over the S.China Sea. However, Gyslain W has recently been disabused of this. The point remains though, was Malaysia using MAS aircraft for surveillance in S. China sea?
@DennisW, Andrew,
Whether the MH370 transponder was turned off 5 mnts, or 50 mnts after the Sochi Paralympics opening ceremony is irrelevant. Flying time from KL to Sochi is 10 hrs, so the target wasn’t the opening ceremony, but it could potentially have been the athletes village or events. There was a plausible threat to the games and the chief of Paralympics stated that the security arrangements was exactly the same as for the Olympics.
Imagine the following scenario:
Two young middle-easterners with stolen western passports board a long-range jet departing an airport with lax security. The IFSO’s are deployed to keep an eye on them to prevent a hijacking. However, plane’s transponder suddenly turns off. Had other terrorists taken over the plane?
There is plausible deniability for the IFSO’s presence on board, as well as any preventative action they take.
@all
I’m not a fan of TYT, but this video covers one group that could pose exactly the kind of threat that the Russians were preparing for. There are links in the description.
https://youtu.be/cCBd0hDR6s0
@CanisMR
Whether the MH370 transponder was turned off 5 mnts, or 50 mnts after the Sochi Paralympics opening ceremony is irrelevant.
I did not bring up the time. You did.
Seattle Times:
Boeing’s fix tames the ‘tiger’ in the 737 MAX flight controls, say experts and critics
@all
My current thinking – not particularly well-orgnaized or complete.
Malaysian officials, high in government knew about the diversion early on. The response is clear in that regard as criticized by ICAO. They expected to be dealing with a post landing scenarion not S&R.
Malaysian officals had no clue about the flight path until days (perhaps weeks) after the diversion. The initial search in the South China Sea underscores that point (unless it was a deliberate deception).
Shah was the sole perp. His “democracy dead” and “submarine” shirts depict his state of mind with respect to the government. His relationship with Tim Pardi is also a red flag. Shah regarded himself as an agent of change.
The diverion date coincides with the anniversary of a major polical upheaval in Malaysian politics that did not work out. People expected change, and after six years got nothing.
The diversion was polically motivated and orchestrated by Shah and others on the ground. Negotiations took place, and did not work out. The flight path reflects an intention to land – Penang, Banda Aceh,…
Plan B was executed – a final possibility to land at the Cocos. It did not work out. The last satphone call reflects that anticipation.
Victor’s Cocos scenario is the best description of the termimus.
Locations previously searched are low probability (<10%). A dive glide dive scenario is a fantasy. Exner and I can disagree on the color of the sky on a clear day, but he is absolutely correct on the final plunge, IMO. The termination was very close to the 7th arc.
Richard, DrB, and Victor are very talented guys, and I certainly appreciate their extended analytics, but I doubt their conclusions will be compelling. Constraints on the accuracy of the ISAT data will be required that are not realistic or substantiated by previously logged data.
@CanisMagnusRufus
Re: ‘Flying time from KL to Sochi is 10 hrs, so the target wasn’t the opening ceremony, but it could potentially have been the athletes village or events.‘
How was a B777 with 49,700 kg of fuel on board going to fly the 4,400 nm to Sochi?
@DennisW.”The response is clear in that regard as criticized by ICAO.”
At the below and an immediate supplement I posted references that made clear the observation was by a regional ICAO secretariat for discussion at a forthcoming meeting. Also considered was a working party paper by Malaysia. The purpose of the paper is at its 3.1: “The meeting is invited to: a) note the information contained in this paper; b) comment on the Key SAR Issues and Possible Actions; and c) discuss any relevant matters as appropriate.
The secretariat noted broadly at its 2.4 that, ““The weaknesses in Asia/Pacific SAR preparedness, particularly in respect of a lack of SAR Agreements and testing of systems using SAREX, had been identified previously by the APSAR/TF. An APANPIRG Conclusion (24/22) Search and Rescue Agreements urging States to make arrangements for senior civil and military decision-makers to facilitate the implementation and maintenance of SAR Agreements as early as possible had not resulted in a noticeable improvement.” I take it that this comment does not apply just to Malaysia.
At 2.5d the Secretariat then implied that without regional level political attention, ie ASEAN, SAARC these problems would not be fixed. I do not think that is aimed at Malaysia in particular either.
The meeting forwarded a draft ICAO paper. The final ICAO paper is critical of regional SAR organisations and recommends improvements by late 2018 to those.
https://mh370.radiantphysics.com/2019/06/30/a-comprehensive-survey-of-possible-mh370-paths/#comment-25759
I think it is reasonable to take from that that the Malaysian organisation was common with others and the whole regional infrastructure needed corrections, particularly with its SAR exercises.
In short, because the Malaysian and other SAR organisations were not properly structurally (‘legally’) or skilled or manned; or their competence demonstrated to government, in Malaysia’s case it was by-passed. As I understand it the same could have transpired elsewhere.
The ICAO final report does not address the secretariat comments you quote specifically, more treating that as an example and an outcome.
However that was not the only failure and various other recommendations were made, including fixing the ICAO Annexes 12 and 13 and their overlap, which had caused confusion, delay and misinterpretation.
@DennisW. “A dive glide dive scenario is a fantasy.”
With a pilot there could have been a glide after left engine AC power loss for 2 mins before the nose down. (From my earlier examples about vapour lock it emerged that the time of a final nose down to realise the first transmission’s descent rate would be brief, around 8 secs). In those 2 mins glide he could have maintained high speed, gaining up to around 16 miles. At the limited descent angle needed for the second transmission’s descent rate he could have gone further depending on his remaining altitude.
Then again with the electrical configuration such that the right engine was delivering all the generated AC, there could have been a powered high speed descent after that failed, the pilot restoring AC power from the left engine subsequently at around pitch down, having shut down the APU when he noticed it starting or, more likely, it failed from fuel exhaustion from vapour lock.
So I think that even without a ‘dive glide glide fantasy’, from these examples your 10% is too low.
@DennisW. Corrrection to my 5:32 am, the first of the possibilities above would not of itself refute the need for a dive glide dive glide to extend the range from the 7th arc substantially.
Even so a dive after right’s failure, the second example, then powered-flight to an extended range would do that, the transmissions being prompted by the pilot restoring AC power to the SDU from the left engine during pitch down then flying on, with no subsequent repowering of it after left engine failure.
@David
I’m not sure that I understood your points and position regarding likelihood of APU fuel availability and vapour lock. Are you assuming that significant pitch-down is required for fuel to be available to APU? Also, if there is already air in the APU line, I presume that this could only be overcome by the DC fuel pump because the APU itself couldn’t “pull” fuel. Is that right?
@DennisW
Thnak you for fine tuning your theory.
I do not undertsand the point about took Malaysia weeks to know flight path. I think they saw radar by morning as far as IGARI switchback. Even if they somehow missed that, by Sunday Inmarsat was trying to say the plane kept flying, and NTSB was on the case, and 1-week later Razak announced the scenario and that was probably several days after he knew.
What I was wondering if China was pressuring SCS search, but I see their newspapers say China was upset to waste that first week. The conspriracy theorists say the distress call to USA was true, if so, the crash was offshore Vietnam. And if so, you’d think China would want to search there.
@TBill
I do not undertsand the point about took Malaysia weeks to know flight path.
We still don’t know the flight path. Just kidding, Bill :-). The “perhaps weeks” usage was to emphasize that no way the Malaysians ever tracked MH370 in real time or made a decision not to intercept.
@DennisW Do you see the crash as a ‘flying accident’ or as a deliberate act?
@Paul Smithson. I think it worth summarising the possibilities as to powering of the final transmissions, since any simple bottom line answers might prove unhelpful.
I have drafted that summary: however in my dotage I am making too many mistakes so will cast a fresh eye over that before posting it, probably tomorrow.
@Shadynuk
A deliberate act by Zaharie Shah. Little doubt about that given all the circumstances.
@Mick Gilbert, @Andrew
How was a B777 with 49,700 kg of fuel on board going to fly to Sochi?
I’ve read some bizarre theories surrounding MH370, but really??
The IFSO’s are in no position to determine how much fuel is onboard the aircraft, but the nominal range of a B777-200ER could easily cover the distance from KL to Sochi, and that is I think the primary criterion.
To be clear, I’m not suggesting that the IFSO’s were truly on a mission to stop hijackers in the case of MH370. In fact, I think the 2 Iranians were intentionally framed. Read the following excerpt from NYT:
https://www.nytimes.com/2014/03/12/world/asia/malaysia-flight.html
Instead of putting them on separate flights, both the Iranians were intentionally placed on the same flight, by an unknown ‘Mr.Ali.’ But, if you look at the seating chart, they were not sitting together.
As for the IFSO’s, they were indeed sitting next to each other, but whether they were authorized to be on board by the Malaysian authorities is the big question. Perhaps, it was informally agreed that IF suspicious passengers were booked, THEN they would be welcome to fly along in the aircraft, during a specific time-frame such as the Sochi Olympics. The MH150 flown by ZS to Jeddah, Saudi Arabia could have been one such flight.
@CanisMR
So how do you fit the ZS simulator data into your theories?
@DennisW re: “A deliberate act by Zaharie Shah. Little doubt about that given all the circumstances.”
A deliberate act that coincided pretty much with fuel exhaustion. OK. Possible. If it was deliberate (north or near 34 south) I don’t understand how ZS could have left the entire post-event narrative in the hands of the Malaysians. With today’s technology, it would be easy to leave something behind that would be next to impossible to suppress and directed to many recipients, even days after the event. He must have anticipated likely failure on a negotiation.
Andrew,
You said:
November 17, 2019 at 6:57 pm
“Seattle Times: Boeing’s fix tames the ‘tiger’ in the 737 MAX flight controls, say experts and critics”
I would like to hear your response to (or your comments on) one of the comments made by a reader of the Seattle Times.
That comment reads:
“What about stab trim cutout switches? Have they been re-wired to the NG spec, so that manual trim switches could be used with STS/MCAS off?”
My interpretation or rephrasing of this comment/question is:
Would a pilot in the revamped aircraft to be able to isolate automatic control of the electric trim independently of the pilots trim switches ?
Please, your response. I realise you may not have information concerning what may actually been done in the re-vamp, but your comments on desirability would be appreciated.
@George G
I haven’t read anything that suggests the wiring architecture of the stab trim cutout switches has reverted to that found in earlier versions of the B737. The design changes all seem to be software-related to prevent the inadvertent activation of MCAS and to prevent MCAS moving the stabiliser beyond the point where the pilot can still maintain control. I don’t know why the wiring architecture was changed in the first place, but I suspect that reverting to the original design would be a major exercise.
To answer the reader’s question: No, I don’t think the revamp will allow pilots to disable the automatic electric trim without also disabling the manual electric trim. It’s all or nothing. That’s not unusual – other Boeing types are similar and Boeing’s recommended procedure for all types is to select both switches to cutout in the event of a trim runaway.
However, with the 737MAX there is still the manual trim problem if the electric trim is deactivated when the aircraft is too far out of trim, in which case manual trim becomes impossible. It seems the reduced authority of MCAS Mk II will not let that happen and presumably the certification testing will make sure that pilots can maintain control even if MCAS does runaway to its limit. I also assume the FAA and other regulators will impose new training requirements for runaway stabiliser scenarios. They might also resurrect the ‘roller-coaster’ manoeuvre as a recovery technique if the manual trim does become difficult to use.
ZS in an extended mid-life crisis?
Possible parallels with a ‘situation’ that I am peripherally aware of.
This started off with the chap concerned appearing to have a bog standard mid-life crisis ie excessive risk-taking behaviour with actual injury (though not serious). However he was in a very senior position and was told in no uncertain terms to cease and desist. In particular he was banned from all forms of recreational aviaton including skydiving.
A couple of years or so later he had progressed to other forms of risk-taking that were totally unacceptable (which incidently, he clearly did not recognise as being unacceptable) and he was immediately booked into a private clinic…
So far, so meh, however the kicker is that the very expensive medics immediately shoved him in a brain scanner and discovered a severe neurodegenerative condition of some kind. It seems likely that this condition was the cause of his previous physical risk-taking as well as the subsequent unacceptable behaviour. So not a typical male mid-life crisis at all.
The upshot was that he was given a very generous early retirement package.
There seems to me some possible parallels with ZS eg his initial physical risk taking and injury.
I wondered whether ZS had been banned from recreational flying by MAS as a condition of continued employment.
Further, I wondered whether there was a serious underlying condition that was adversely affecting his judgment or possibly progressive brain damage initiated by his serious hang gliding accident.
@David. re memory – you and me both!
Looking at the simulations, I was struck by the observation that in all of the “conventional” scenarios, the aircraft basically stalls twice.
The first stall happens some minutes after loss of first engine when speed drops to the level that it can no longer maintain initial altitude. For 40,000ft scenarios, this happens at GS of ~310kt. For the 35,000ft scenarios it is 250-270kt. After an initial ROD blip of -4000fpm, a fairly steady rate of descent is established at around -600fpm.
With the second control upset, I found it difficult to distinguish between stall and second engine flameout. In each instance, we have more or less simultaneous loss of directional stability and another stall followed by phygoids. Initial ROD on the second upset more like -5000fpm.
If nose-down is required to make fuel available to the APU, then it seems to me that this would only happen a) at the stall points b) during the phugoids. If it takes some time to slow down to stall point, then our assumption of second flameout 001730 (or 001930 minus two) might be wrong. Depending on speed and altitude, second flameout could have occurred earlier.
@flatpack
I was just reading about actress Mary Steenburgen who had a minor arm surgery some years ago, somehow the anesthesia instantly changed her personality into an avid song writer. Which was a concern for the family, but she decided to go with it and became a noted song writer.
Although we like to hold pilots on a cut above the rest of us, my view is the human mind can change with passage of time, for various reasons, and it would be good to have certain barriers (eg; 2 in cockpit) to remove temptation that might come with security rules that are too loose (eg; MH370).
Andrew,
Thank you, for your answer on B737 Max stab trim cutout.
@paul smithson. This is in response to your earlier.
“Are you assuming that significant pitch-down is required for fuel to be available to APU?”
In the below I relate how pitch down can slosh residual fuel forward, depriving the APU DC pump of suction and so the APU of a pressurised supply.
“…if there is already air in the APU line, I presume that this could only be overcome by the DC fuel pump because the APU itself couldn’t “pull” fuel. Is that right?”
Vapour could form in the line, most likely at the APU in which case the APU wouldn’t pull fuel as you say. In the below I go into the likelihood of that.
While we here use the ATSB/Boeing interpretation of what powered the SDU’s final transmissions, that is unproven and I think other possibilities warrant consideration also.
Unfortunately there is no clear answer nor is that likely since it would be impractical as the matter now stands to conduct the needed flight trials.
https://www.dropbox.com/s/57rnyoslq2trqu5/On%20whether%20the%20final%20transmissions%20were%20APU%20powered%20or%20not.docx?dl=0
Does the above help with your 8:43 am above?
@TBill
The anesthetic thing is surprising and interesting.
My view is that personality is pretty constant over time and that (other than mid-life crisis) in blokes any change is towards increased stability or mellowness. I would caveat that view with “unless there is a brain insult or traumatic event”.
As to ZS, I feel that between them, the RMP and MAS likely have enough information to distinguish between a vanilla mid-life crisis and a neurodegenerative condition.
Slightly off-topic, didn’t that germanwings loon actually self-report to a doctor that he had psychesomatic blindness?
That kid should have been grounded and shoved inside a brain scanner straight away.
I suspect that pretty soon airline pilots will have to have baseline scans at the start of their career followed by re-scans at regular intervals or following any ‘brain insult’.
@David
Nice paper and I feel you could be correct that Arc7 is not really fligth end. But I probably think we need search Arc7 first and then move on, unless Boeing can tell us a big hint. If I had to be honest right now I would assign quite low % chance of success for any proposed search area. I just think that means we have a big job to find MH370, and there are many chunks of the elephant that need to be searched. So I’d be talking some kind of multi-year joint-industry, joint-country effort, and maybe they could also use complex (active pilot) models to narrow down, not sure. But of course a comprehensive search approach is a pipe dream right now.
@flatpack
Yes Germanwings Lubitz seems to be a classic case of a suicidal person. I am not sure the fixes but it could be a combination of approaches. By my count almost one fligth per year is either suicide or “mystery” since 2014. I’ll say MH370, Germanmwings, India AN flight, Seattle mechanic DASH joyride, and Air Atlas.
@David
In the case of reconnecting the power at 18:25, there is a belief that the SDU had been cold soaked, and that the cabin had been depressurized for a period of time prior to this event. In the end of flight scenario, one might believe that the cabin had been re-pressurized after 18:25 and that the re-connection of power was the only influence on OCXO frequency. There would not be a cold soak, so I imagine that the OCXO start-up transient would be small. (Due to the thermal mass of the unit itself and of the surrounding cabin)
In some or your scenarios, the possibility of a later engine re-start is discussed.
If it were the left engine, then the duration of such a re-start would less than about 2 miniatures else there would have been a re-log-on attempt. In this scenario, the duration of a restart by the right engine might be longer depending on the fail-over configuration of the buses.
Since the currently believed maximum rate of descent is not inconsistent with a later recovery of stable control of the aircraft, none of your conclusions should rule out a glide. (and I accept that you do not do so)
@david. Thank you very much for the write up.
@TBill. “….I’d be talking some kind of multi-year joint-industry, joint-country effort…”
While that would be favoured by the families and NOK I am unsure that of itself provides enough incentive. Were there suspicions of a serious materiel flaw affecting airworthiness, as with the second Comet crash, yes.
A high probability of success is the alternative prompter but that is not yet evident.
@Sid Bennett. “There would not be a cold soak, so I imagine that the OCXO start-up transient would be small.”
Thank you, yes my terminology “cold soak” should have read “start-up transient” as you imply. Also it was due to being depowered for a minute, not 2.
However that transient does make a significant difference. See Holland’s V. B. on page 8 of his 2018 version.
My para 5 at page 2 has been amended accordingly.
I notice that Holland 9DSTG) flags satellite link loss as one prompt for his Hypothesis 2 so have added the thought that a pilot could cause that.
I have to leave aside your second paragraph for later.
@Sid Bennett. Line 5. For “…..page 8” please read “….page 7.”
@Sid Bennett. Following you para 2 you indicate that a left engine restart longer than 2 mins would result in a log-on attempt if its duration was more than 2 mins. I take it that a left engine restart would be accompanied by an APU auto-start. But if the engine ran for longer than this that would transport the aircraft away from the 7th arc at that 2 min mark, so perhaps I do not follow.
Also you say, the right engine might run longer, “depending on the fail-over configuration of the buses”. Do you mean if the left’s generators carried the electrical load, the right’s generation inoperative, and the left’s failure led to the 7th arc transmissions the right could transport the aircraft further as above?
In case this is germane, putting my page 1, paragraph 8 scenario another way and more completely, supposing a left engine relight in the dive, and that the pilot had not;
• shut down the APU during its start and,
• it had not suffered from vapour lock or,
• if he had selected the left IDG on after the relight,
then SDU reboot from either source would mark the 7th arc and there could be powered flight beyond that. That would continue until left engine fuel exhaustion – or a crash. If the latter there would be no further transmissions and likewise there would be none at fuel exhaustion if the APU would not auto-start a second time or it suffered vapour lock during that or in the minute following.
@David
“…While that would be favoured by the families and NOK I am unsure that of itself provides enough incentive. Were there suspicions of a serious materiel flaw affecting airworthiness, as with the second Comet crash, yes.”
If MH370 was a nefarious event, we need to know what all may have been done, just as important as a mechanical fail. I have tried to say that is one justification, as far as public is concerned. I can understand why officials may be less eager to disclose that information though.
@David
If understand the power supply situation (and I may not!), the power to the SDU under normal circumstances comes from the left engine generator. If that generator fails for any reason, the right engine generator is cross-connected to supply the entire load. (same in the case of a left engine generator failure).
The right engine fuel exhaustion occurs somewhere around 00:11 or slightly before, and the only manifestation is that we may see a slight change BFO due to a descent (I think this is really just a presumption, since it is slight and could have other sources).
The left engine fuel exhaustion causes complete electrical failure for all those things supplied from the generator systems (I am certain I have overlooked those things supplied by battery backed up power such as the INS).
This causes the APU to start and eventually (2 minitues nominal) he SDU re-logs-on. It appears to run out of fuel for some reason (you have explained that) and the RAT deploys, supplying power to a rather limited set of equipment.
At this stage, I understand that it might be possible that the change in attitude of the plane (dive), in combination with the auto-restart function of the engines might cause one or both of the engines to re-start for a period of time.
If that happens, would not the power to the SDU be restored? Depending on the bus configuration, either engine might be the source of power. I assume(wow) that if the engine restarts and the generator begins to supply power, the power would be restored to the equipment on the bus (e.g., SDU)
Since there is no evidence of a further attempt to log on after 00:19, it would appear that any subsequent restart of the engine would be less than the startup time for the SDU.
I believe that this scenario is technically correct, but I expect that both the details and the underlying assertions will be commented upon by the readers.
My interest in this aspect of the flight is to help develop a bound on the powered flight at the end based on the currently available information.
Sid:
There’s a lot to unpack in your post above. Let me address it inline as follows:
If understand the power supply situation (and I may not!), the power to the SDU under normal circumstances comes from the left engine generator. If that generator fails for any reason, the right engine generator is cross-connected to supply the entire load. (same in the case of a left engine generator failure).
[To clarify, it was the IDGs (integrated drive generator), not the back up generators)]
The right engine fuel exhaustion occurs somewhere around 00:11 or slightly before, and the only manifestation is that we may see a slight change BFO due to a descent (I think this is really just a presumption, since it is slight and could have other sources).
[There is no descent whatsoever for several minutes after a single engine failure. Instead, the speed begins to decrease while maintaining altitude. Assuming an altitude of ~35-40K ft, this continues for ~5-10 minutes, depending on initial conditions, until a speed of ~stall +20 kts is reached, at which time the descent starts. The descent continues until the single engine service ceiling is reached, ~25,000 ft.]
The left engine fuel exhaustion causes complete electrical failure for all those things supplied from the generator systems (I am certain I have overlooked those things supplied by battery backed up power such as the INS).
This causes the APU to start and eventually (2 minitues nominal) he SDU re-logs-on. It appears to run out of fuel for some reason (you have explained that) and the RAT deploys, supplying power to a rather limited set of equipment.
[You have the sequence backwards. Immediately after second (left) engine fuel exhaustion, the RAT deploys within ~30 seconds and the APU begins to start up. Approximately 30 seconds later, the APU begins to deliver full power (after the RAT). It is at that point that the AES begins to reboot.]
At this stage, I understand that it might be possible that the change in attitude of the plane (dive), in combination with the auto-restart function of the engines might cause one or both of the engines to re-start for a period of time.
[Based on Level D sim’s, any restart would last less than a second or 2.]
If that happens, would not the power to the SDU be restored? Depending on the bus configuration, either engine might be the source of power. I assume(wow) that if the engine restarts and the generator begins to supply power, the power would be restored to the equipment on the bus (e.g., SDU)
[No, as noted above, any attempt to restart following MEFE would result in no more than a second or 2 of engine run time. There is no possibility that the main engines could have supplied electrical power (sufficient for a reboot) to the AES following MEFE.]
Since there is no evidence of a further attempt to log on after 00:19, it would appear that any subsequent restart of the engine would be less than the startup time for the SDU.
[Yes, far less, as noted above.]
I believe that this scenario is technically correct, but I expect that both the details and the underlying assertions will be commented upon by the readers.
My interest in this aspect of the flight is to help develop a bound on the powered flight at the end based on the currently available information.
@Sid Bennett. Complementing ALSM but coming at it from another direction.
In your scenario, if the APU has suffered fuel exhaustion there would be no pressurised supply available to the engines. It is unlikely that any residual fuel left would cover the tank outlets for their gravity feeds in a dive much less provide enough for either to reach IDG generating speed. Also from the time of failure to the time of the transmissions they would have run down to the point they would shut down automatically so there would be no automatic relight available after that irrespective of a windmill and in a windmill they would not reach generating speed.
Hence there would be no chance of power to the SDU being restored in that scenario.
You might find @Andrew’s treatise below helpful as to sequence and consumption.
https://www.dropbox.com/s/lhw5lr3qruceszd/MH370%20ENG_APU_Start.pdf?dl=0
Mike, David,
May I please summarise the above two posts 25960 and 25961 in three sentences:
If main engines suffer flameouts due to the fuel tanks running out of fuel whilst in cruise, then there is simply no more fuel for them to sensibly auto-restart.
Even IF, due to the presence of a small amount of residual fuel in the relevant fuel tank, a main engine relight occurs it will be very short-lived and all it will do is lessen the amount of residual fuel in the tank.
However, If an APU auto re-start occurs, then its much lower fuel requirement may allow for a short time of operation after the start is complete, until there is no longer enough residual fuel to even sustain the APU.
Meant to add, anyone who may disagree with the above please feel free.
George G:
Yes, and I (and others) believe there would be at least a few minutes of fuel in the APU fuel line available to keep the APU running after the tank was dry.
@George G
Thank you. I was having a lot of difficulty following the narative.
@ALSM
So nothing has really changed in the end of flight theory??
@George G. “If main engines suffer flameouts due to the fuel tanks running out of fuel whilst in cruise, then there is simply no more fuel for them to sensibly auto-restart.
Even IF, due to the presence of a small amount of residual fuel in the relevant fuel tank, a main engine relight occurs it will be very short-lived and all it will do is lessen the amount of residual fuel in the tank.”
First, It might be worth you looking at @Andrew’s work that I referenced above.
Second, it depends on the circumstances of the flame out and in particular whether an active pilot is present.
Third I am sure that another rendition of my objections to outmoded simplifications will be as prolix as ever but I am bound to summarise why I think the issues should not be reduced to such simplification.
So herewith. The Boeing simulations of double engine flame outs from lack of fuel offered an APU powered explanations of the 7th arc transmissions and descent rates, whatever the electrical configuration. However they did not replicate those well at all. One of them met the descent rate in a small section of one descent in one configuration but at quite the wrong timing. In an alternative configuration more than one descent replicated the descent rates but again with timing was awry.
The ATSB took it that these simulations demonstrated that the APU powered theory was satisfactory despite these shortcomings. In part I believe that was because there was no other considered that might have offered more convincing solutions.
In my view that analysis was constrained by the assumption that there was no pilot, a principal reason for that being that accepting there might have been one would mean allowing various manoeuvres and, particularly, a glide after fuel exhaustion, this all rendering the area to be searched impracticable.
The searches subsequently have failed and so such assumptions are subject to re-examination. I believe that while the APU powered theory may be sound, a new search should take other possibilities into account nevertheless.
I have argued that aircraft attitude changes might have shifted the residual fuel out of the reach of the pump supplying the APU, depressurising its fuel line, and that vapourisation of the unpressurised line could prevent the APU accessing that too.
In that case another explanation is needed for the final transmissions. With a pilot there are other possibilities that I have gone into, laboriously and boringly I know. That is because it is complicated and assumptions are needed.
These possibilities as I have explained can be consistent with an APU powered 7th arc, or IDG power restoration leading to that, IDG cycling, or even a manoeuvre leading to temporary loss of the satellite. What these can lead to is powered flight beyond the 7th arc descent.
To constrain the search it could be assumed that the pilot would maintain the pre 7th arc course, that needing adjustment as the extension beyond the 7th arc increased, to allow the added fuel.
I should add that there are other reasons for mistrusting the Boeing simulations. While an APU start has been a cornerstone, relying on residual fuel, in turn that relies on aircraft attitude, manouevring and no risk of vapour lock.
Yet vapour lock risk is offered as a reason for a pressurised fuel supply. Still, the ATSB includes the fuel in the fuel line as available to the APU without raising that as a possibility. Then attitude and manoeuvring simulation takes no account of the APU start, which it cannot replicate even though it its operation is assumed. The alternative electrical configuration simulations do not replicate any relight or the effect of a flame-out yet in that configuration the left engine probably would flame out when the right engine failed, its pressurised fuel supply failing. The simulator must assume that in this case its gravity supply would keep it going pending arrival of the standby APU DC pump driven supply. However the purpose of the pressurising boost pumps at high altitude is to obviate such risk. Why does the simulator think that engine would not flame out? I doubt it that would be based on flight trials.
My suggestion remains that minds are not closed to other possibilities given that the search has failed so far and besides the simulations do not give great confidence that the current approach should remain unquestioned.
In haste (compulsory) I regret.
@David,
1. I had carefully considered and chosen my words in Comment- 25962. They included:
1.1. “flameouts due to the fuel tanks running out of fuel”; and
1.2. “whilst in cruise”; and
1.3. “to sensibly auto-restart”.
I had previously studiously read @Andrew’s work, and prior to Commentt-25962 I referred to your link and and started to read Andrew’s work again, for sufficient time to be sure it is what I had read before.
Before preparing this current comment I have re-read Andrew’s “MH370 ENG_APU_Start.pdf”, specifically with respect to what he has reported on fuel and re-start of a main engine.
This has only reinforced in my opinion my terminology “to sensibly auto-restart”.
Remember this is all predicated on there being only 30 lbs of fuel potentially available.
In Section 7. Fuel Flow Analysis and Section 8. Fuel Consumption Analysis Andrew has used FL350 in his estimates for the two (Main) Engine Restart cases he has evaluated.
If the aircraft had descended from (say) FL350 to (say) FL290 after the first Main Engine flame-out and prior to the second then the fuel required to restart the engine will be more due to the lower altitude and higher air density but will possibly take a little less time.
Andrew’s analysis seems to me to confirm that if a main engine relight occurs it will be very short-lived, even if it may actually get very briefly to a significant N3, N1 and thrust level.
I do not know at what N3 speed there might begin generation of electrical power during the re-light or brief attempt at re-start. Others should be able to provide this information.
Suffice it to say that 30 lbs of fuel would not seem enough.
2. I posted Comment-25962 for one reason. In previous posts it seemed that discussion was getting bogged down into whether a Main Engine Re-start was going to happen and was it going to produce the (presumed) electrical power generation allowing the communication to the satellite. I thought not, and think not.
3. Note that I make no comment on whether the APU may have Auto-Started, other than my last sentence in the previous Comment-25962, repeated here, AND that it would seem most amenable for successful APU auto-start if the aircraft was still in level cruise. That last sentence was:
“However, If an APU auto re-start occurs, then its much lower fuel requirement may allow for a short time of operation after the start is complete, until there is no longer enough residual fuel to even sustain the APU.”
4. David, you say: “or even a manoeuvre leading to temporary loss of the satellite.”
It is up to others to consider whether a temporary loss of the satellite would cause a re-logon when contact was restored. But, in previous Comment-25629 October 17, 2019 at 4:59 am, I said: ‘If there remained active human participation in the cockpit, then may I be presumptious and offer that “all bets are off”.’
(Even though I then proposed some possibilities)
Adding further to the APU fuel “body of knowledge”…Boeing stated that, absent an unusual attitude, there would have been ~13 minutes of fuel left in the Left Tank, available to the APU, at the time the Left Engine no longer had access to any fuel in the Left Tank (this is by design). It’s not hard to imaging unusual attitudes to develop post MEFE. But how fast? It’s hard to see the APU running dry prior to the expected IFE logon (~00:21 UTC).Remember…we know it started and ran long enough for the AES to logon. So theories about low line pressure, etc., need to consider all this.
@ALSM
The lack of IFE logon is a solid observable.
A “soft” qualifier is that there is no logical reason for the PIC (assuming PIC active control) to execute a steep descent followed by a pull out and glide. We mostly agree that the PIC was not aware of BTO/BFO tracking, so executing a dive-glide-dive scenario to complicate the search would not be a motive.
I would qualify that above are the base case assumptions assuming the pilot managed the fuel and elec congigs in the assumed manner.
CAPTIO proposal with RAT deployed at IGARI is an example of an investigator straying from the assumed base case.
@TBill
What if, the fuel cross feed valves were opened?
@George G. The way I read the effect of the responses to your post was that they appeared to shut the book on piloted possibilities. Hence the nature of my reponse.
With my mind on this I regret not having addressed your specifics.
“Andrew’s analysis seems to me to confirm that if a main engine relight occurs it will be very short-lived” Yes, though as below as his work also finds, it can lead to a high descent rate if the ALSM simulation of simultaneous engine flame outs is relevant.
“I do not know at what N3 speed there might begin generation of electrical power during the re-light or brief attempt at re-start. Others should be able to provide this information.”
Maybe @Andrew can comment. I think those relights to 75% N1 would be well above generating speed though generators take a little while to come on line.
“Suffice it to say that 30 lbs of fuel would not seem enough”. No not for a relit engine to generate final transmissions.
“….discussion was getting bogged down into whether a Main Engine Re-start was going to happen and was it going to produce the (presumed) electrical power generation allowing the communication to the satellite. I thought not, and think not.” I think there could be a piloted or auto relight if it flamed out with fuel left as I have hypothesised. That or a simultaneous APU auto-start could have produced the final transmissions.
Other than that I do not recall a relight-powered SDU reboot being raised.
Regarding loss of the satellite link, piloted, you say, “in previous Comment-25629 October 17, 2019 at 4:59 am, I said: ‘If there remained active human participation in the cockpit, then may I be presumptuous and offer that “all bets are off”.’
(Even though I then proposed some possibilities)”. Fair enough.
I hope that has cleared up at least some of it.
However I add some further interpretation of @Andrew’s fuel consumption assessments and his paragraphs 8 -10, agreeing with his qualification about ALSM’s level D simulations that, “The accuracy of the simulator systems modelling is unknown, especially in relation to the availability of residual fuel after the initial flameout.”
• In both Andrew’s engine relight cases, fuel consumption would have caused the pressurised fuel supply to the APU to have failed before the final transmissions were completed.
• Had there been no light-offs, there would have been residual fuel left for APU powered transmissions. However the steep dive during the transmissions may have led to the tank fuel being unavailable, if previous attitude changes hadn’t already.
• In one of the simulations, after a left engine relight the descent assumed the broad character of the MH370 final descent. However that was after both engines had failed together. That is similar to the quite likely outcome of a right engine failure when the electrical configuration had that engine generating all AC power.
• Where the left engine failed minutes after the right, as in the currently supposed sequence, a similar brief relight did not lead to such an outcome, even though the autopilot was disengaged in both instances. In other words the level D simulations did not replicate the MH370 descent as currently supposed.
@ALSM. If the 30 lbs of residual fuel, available to restart the left engine after exhaustion of its main tank fuel is “by design”:
• What do you think that might be for? The engine will not start without fuel. To bring the APU on line briefly? What would that be for?
If the right still had fuel, opening the cross feed will supply the left and APU so no point to the residual then. With the right with out fuel, again there seems little point.
• Why does the Boeing engineering simulator overlook it?
David: I don’t know why the designed it this way, but they did. The APU inlet is lower than the left main engine inlet. From ATSB 3 Dec 2015
Auxiliary Power Unit (APU) fuel inlet
The APU fuel inlet is located in the left main tank. The APU is estimated to consume (when electrically-loaded) approximately 2 lb of fuel in 55 seconds. In a standard flight attitude (1° pitch), the difference in location between the left engine fuel inlet and the APU fuel inlet would result in approximately 30 lb of fuel being available to the APU after a left engine fuel exhaustion. From this information, the APU had a maximum operating time of approximately 13 minutes and 45 seconds.
It should be noted that this 30 lbs of fuel is fuel in the left tank (below the main engine inlet). It does not include fuel in the APU line. You and I have discussed this more than I care to remember. Let’s not rehash all this again. It is a waste of time.
@ALSM. “I don’t know why the designed it this way, but they did.”
Hmmmm. 30 lbs, that to be available if the pilot pulls the nose up just the right amount and holds that until consumed. Nothing in the FCOM?
Your quote is from 2015.
I have taken a refresher on the ATSB’s stance since, via its Search and Debris Examination update statement of 2 years later. That is rather more circumspect:
“In the simulator, when the fuel tank is empty, zero fuel is available to all systems fed from the tank. However, in a real aircraft, various aircraft attitudes MAY result in unusable fuel (usually BELOW engine/APU inlets) becoming available to the fuel inlets for the APU/engines. IF this resulted in APU start-up……” (My upper case).
You will see the APU inlet is now described as usually below the unusable fuel. For there to be a pressurised supply to the engines and APU the residual fuel must be moved to the rear and stay there. (I notice from @Victor’s 19th August 2018 post that the simulations were at 35,000 ft and 40,000. I presume that if that (apparently purposeless) 30 lbs was “designed in” Boeing would have seen to it that it was pressurised for such high altitude.)
In the APU’s case that stay would include the glide and dive, up to log-on acceptance, 2:08 mins after AC loss and about 2:18 from fuel exhaustion of the last SDU-powering engine.
My post to which you responded made no mention of fuel in the line, that being irrelevant to it. Up to you.
@David
RE: ‘ If the 30 lbs of residual fuel, available to restart the left engine after exhaustion of its main tank fuel is “by design”…’
I don’t believe there was any intent by the manufacturer to make residual fuel available to the APU when the aircraft was designed. It’s simply a by-product of the different locations of the fuel intakes, nothing more. I think that’s what @ALSM meant when he said ‘by design’.
There is no information in the FCOM about residual fuel. As far as I’m aware, the first time most people became aware of it was when the ATSB published its report.
@Andrew. Thanks, though “by design” to me means deliberate, with purpose, not incidental or a by-product.
“As far as I’m aware, the first time most people became aware of it was when the ATSB published its report.” That was my understanding too.
However I think the underlying question really is how reliable the assumption is that the SDU was powered by the APU post usable fuel exhaustion for the final transmissions, that is to the point that other possible explanations for this should be excluded.
Without knowing actual sizes or any other detail, it may be that the presumably smaller fuel tank outlet for the APU may simply be that, smaller, and thus the upper edge of the outlet may be closer to the bottom of the tank than one of the fuel tank outlets for the main engines ?
Whether or not by design, or no, it may fortuitously one day give a pilot who has run out of fuel a bit of breathing space to try to transfer fuel, to communicate, to plan a controlled descent.
( briefly complementing the RAT )
@David
Seems to me one “hanging chad” coming out of the recent French meetings with Boeing, is Boeing’s *alleged* belief that the pilot was active to the end.
Which leads to yet two more (frustratingly secretive) questions about MH370: (1) did Boeing really say that? and (2) Why does Boeing say that?
@Richard
Equalization of the fuel tanks was Victor’s proposal earlier this year. It means probably constant speed over Arc6, which allows an estimate of where on Arc6 MH370 might have been. I forget the implications for 180 South, maybe possible glide beyond Arc7.
What I would like to see, if we say per David that Arc7 may not be end of flight, and assuming some glide at the end, the fuel exhaustion distance limit over the whole Arc7. Big job so I am not expecting you to actually do that. I believe there was an earlier version of this by ATSB.
@David said: However I think the underlying question really is how reliable the assumption is that the SDU was powered by the APU post usable fuel exhaustion for the final transmissions, that is to the point that other possible explanations for this should be excluded.
If not the start of the APU after fuel exhaustion of the right or left engine (depending on the electrical configuration), what would explain the reboot of the SDU? Most here are in an agreement that there was insufficient fuel for an engine re-light followed by a minute of IDG power.
I had hoped to refine the scenario of the end game by my hypothetical a few days ago, but I see that there are a lot of open questions re the APU operation.
That there might be 30 lb(?kg?) of fuel left need only be an incidental consequence of the design where the APU is available for in flight back up purposes and the concept of engine failure due to fuel exhaustion is not a plausible situation (what next, parachutes?).
@TB [did Boeing say…l?]:
I’ll take a swing: IF ‘Boeing’ did say that, they are probably reflecting a predominant opinion here: If no active pilot at end, the wreckage would almost certainly have been found. Since it has not been found, some sequence of maneuvering is very likely.
[Also — responding to your earlier post about ‘nefarious’ action: The initial search, and continuation by OI, were responsibly [IMO] focused on the 7th arc, since ghost flight following some unknown mechanical problem should have come down there. Mostly by elimination we are left with ‘nefarious’, which is well enough known as a risk from other crashes, a risk which can and should be reduced without exact knowledge of what happened to MH370.]
@Sid Bennett
“…. engine failure, due to fuel exhaustion, is not a plausible situation (what next, parachutes ?)”
Really ?
I disagree.
Total engine failure is the issue, which can have multiple causes, of which fuel exhaustion is but only one.
Example.
Cactus 1549.
Bird Strike.
“We’ve got one rolling back. We’ve got both rolling back. I’m starting the APU”.
The fact that the APU was running, did help somewhat.
On modern airliners, battery power alone is not enough for safety for any significant length of time. That is why you need the RAT, for hydraulic and electrical power. The problem with the RAT’s though, is that their capability to generate substantial amounts of electrical and hydraulic power is limited. Back when they were mandated, the “load” requirements of airliners of the time were manageable. Modern airliners are much bigger, more complicated, more systems, more computers, more actuators, and really do need bigger RATs, but there is a practical limit to how big they can be. The result is that only a few systems can be powered by the RAT in modern large aircraft. So, you then have to choose which systems you will power with your limited power budget. Load shedding is necessary. So, overall safety is compromised, by those necessary choices. If the APU was guaranteed to be available, the power budget issue would not be an issue. It would be far safer all around.
I personally think that there should be a dedicated APU tank in the immediate vicinity of the APU, with guaranteed gravity feed capability, and with a capacity to guarantee at least 30 minutes “full load” operation of the APU, ie, so that the APU is always available and able , to provide all / full electrical, hydraulic and pneumatic requirements.
Thirty minutes would allow for the worst case scenario of loss of all engines at cruise altitude, the glide descent, and allow normal configuration set up for landing (flaps / gear) hopefully, for an emergency landing on any runway within glide range.
Since most APU’s are installed in the empennage, the APU tank itself could be easily installed in the fin (as per the VC-10 header tank). During normal operations, the APU tank itself, should be continuously fed from the main tanks, and the only outlet from the APU tank is to be to the APU itself, so that it is always full.
Therefore, guaranteeing APU availability, for 30 minutes, becomes a valid consideration, for future design and certification requirements, in my opinion.
@Victor. Thank you. “If not the start of the APU after fuel exhaustion of the right or left engine (depending on the electrical configuration), what would explain the reboot of the SDU?”
Recently I have touted the possibility of a piloted manoeuvre that broke the satellite link, as raised by Holland, and also a pilot cycling the IDG powering the SDU before fuel exhaustion, though without a rationale as yet.
Also I have raised the likelihood that in the ATSB’s electric configuration where the right engine is carrying all electrical load, 10 secs after flame out from its fuel exhaustion there would be loss of AC in the aircraft causing failure of the left engine boost pumps, ie failure of the pressurised supply to the left engine. At high altitude an instantaneous left engine flame out thence is likely.
I have supposed in that case, a pilot would dive to windmill start the left engine. APU auto-start on the loss of AC (the APU DC fuel pump providing a pressurised supply from the remaining left engine available fuel) would lead to the 7th arc transmissions, though a relit left engine might beat it to that its IDG now selected on. Powered flight after recovery could then continue to a crash.
Even so, IFE non-connection would need explanation in that scenario and reconciliation with fuel consumption to the 7th arc would be needed.
I would see the right IDG having been selected on at 18:24:27, that and the left engine generators being off before.
There well may be other piloted scenarios in the ether: this last has occurred, to me anyway, just recently. I have not followed the French thinking that @TBill alludes to.
@Victor. Fourth paragraph. At its start please add a missing sentence:
“The APU DC fuel pump will start at left engine failure, supplying it with relight fuel. However the prospects of a relight at altitude are not high.”
@David;
… also a pilot cycling the IDG powering the SDU before fuel exhaustion, though without a rationale as yet.
Perhaps the rationale was to get the RAT down and established before all IDG power was lost at ME and APU FE.
I’ve often mused that this pilot was going to do a bit of “test piloting” on the way down. Could have even started with a stall.
@Barry Carlson. Yes loss of AC on both transfer buses for 15 secs will deploy it and he could deploy it manually also should he wish.
Lion Air’s voice recorder found:
https://stockdailydish.com/indonesia-finds-lion-air-jets-cockpit-voice-recorder/
@David
Old news? The CVR was found on 14 January 2019. Relevant excerpts were included in the NTSC’s final report.
@all
…out my league here, but anybody consider the possibility that the perps would have restarted the transponder towards the ‘end of flight’ to signal their approach to collaborators on the ocean? Would the transponder have required power?
@loren russell
“If Boeing did say that, they are probably reflecting a predominant opinion here: If no active pilot at end, the wreckage would almost certainly have been found. Since it has not been found, some sequence of maneuvering is very likely.”
Active pilot not predominant view here (yet) anyways loren. This is IG website and IG is still focus on passive pilot flight. A few of us blog participants are active pilot proponents. If Boeing thinks active pilot to end, I am thinking they see a clue like maybe reboot of the SATCOM (which base case here was caused by APU restart upon Fuel Exhaustion FE).
I have supported Arc7 search strategy til now. Now I probably still support search of Arc7 for 20-25 South and any areas missed (BR? and maybe 180 S recheck). But I have an intuitive feeling that we could be missing some possible crash location proposals that active pilot assumptions might yield. It is a bit academic without a serious search effort.
@CanisMR
CAPTIO has suggested maybe XPonder was optionally put back on for crash prevention (TCAS). I’ve not heard any other rationale suggested.
Does anyone have the Banda Aceh ATS-B data for the relevant time period?
New Subject….
With respect to the question of piloted v. non-piloted end game:
I would suggest that we should adopt a more structured approach to the problem. I think we may reach different conclusions depending on this binary choice (and there is a separate set of subsidiary choices depending on how long you contend that the plane had a pilot.)
We can argue that, if a waypoint flight commenced shortly after the initial diversion, the only evidence of a pilot present later is the re-log on at 18:25 and the apparent offset for collision avoidance.
On the other hand, there is no evidence that the pilot was not present after 18:25.
In there were a pilot present after 18:25, and that pilot believed that the plane had either evaded detection, or was sufficiently distant from an interceptor to be able to escape (even so, would the interceptor shot down the plane?), the pilot need do nothing but monitor the flight as an ordinary procedure. (Why, because.) The FMT is the ultimate disappearing act. (There are some details here that could be debated.)
If the pilot were active (changing course and speed….) after 18:40, we are unlikely to find the plane as the data set is too sparse to confidently hypothesize a complex path.
So, the next step is to consider the other evidence. That is, the result of the various searches. It is accepted that no matter how diligent the searches may have been, there is a 10 percent chance that the plane was there and undetected. If there were no other hypothesized locations, then the options would be to abandon the search, re-search the areas, or take the results of the search into account and seek additional plausible search areas.
Apart from the CAPTIO hypothesis, most of us believe that the path lies somewhere to the west of a line running due south from IGOGU. (I expect some rebuttal here…)
The only evidence arguing in favor of a search to the north are the drift study. There have been many of them and I respect the diligence of Richard and the others who have expended much time on the subject, but there are too many different conclusions. (Has there been a meta analysis?) Since the percentage of the plane that has been found is very small and the plane is known to have generated may fragments, can we develop any analytical approach to the validity of this sample of recovered debris versus a situation where almost all of the of the remaining floating debris being trapped in the SIO gyre?
Most of the work now (even by Richard) focuses again on a nominally due south path (and I would include 180, 186 and possibly ~189).
We also need to take into account the trend of the group thinking since the event.
At the beginning there was no thought of an intentional piloted diversion, the hypothesis being that there was a significant equipment malfunction/fire or the like and the pilots may have been suffering from hypoxia. This explanation has since lost favor, but it was the basis of the official studies and the original search, since it suited the Malaysians and they were in charge.
The evidence points to a piloted flight until 18:25, and no evidence of anything after that time. (agree, disagree?)
This influenced the simulator studies as well, as I am not aware of a professional simulator study with a pilot at the end. An un-piloted end game is likely to be represented by the studies that showed the plane crashing close to the 7th arc.
However, it took some time to uncover the Gimli glider and some similar events, including subsequent events, that seem to indicate that a dive-glide scenario is at least possible.
Some questions?
How much weight should be given to the drift studies?
Do we still reject the pilot at the end as a plausible hypotheses (and why)?
I hope that the group will understand that I am trying to provoke a discussion of these points so that we can make some further progress. Most of us (yes, me too) seem to be re-arguing our individual points of view without convincing a preponderance of the other contributors.
Happy Thanksgiving to those in the US and a similar wish to those outside the US. And my hopes for closure for the NOK.
Sid
@Sid Bennett: Some thoughts on your last comment:
Does anyone have the Banda Aceh ATS-B data for the relevant time period?
Captio has published the ADS-B from public sources (e.g., FlightAware, FR24).
If the pilot were active (changing course and speed….) after 18:40, we are unlikely to find the plane as the data set is too sparse to confidently hypothesize a complex path.
I would move the cut-off time from 18:40 (which lacked a BTO value) to 19:41.
This influenced the simulator studies as well, as I am not aware of a professional simulator study with a pilot at the end.
This has not been studied because it is not difficult to estimate the distance of a glide without the use of a Level D simulator. The dive-recovery causes a net energy loss of 2 or 3 thousand feet, and a descent angle during the glide of around 2.8 to 3.0 deg is achievable. This puts the possible glide range at 110+ NM for an initial altitude of around 40,000 ft.
However, it took some time to uncover the Gimli glider and some similar events, including subsequent events, that seem to indicate that a dive-glide scenario is at least possible.
As we have discussed before, I am not aware of anybody that disagrees with this.
Most of us (yes, me too) seem to be re-arguing our individual points of view without convincing a preponderance of the other contributors.
My goal has never been to reach consensus on the location of the plane, as that would be impossible. Rather, my intention has always been to provide a forum where ideas can be exchanged and evaluated.
TBill said: This is IG website and IG is still focus on passive pilot flight.
There are a number of people here who believe it is unlikely that a path with multiple maneuvers (turns, climbs, descents, and changes in speed) would have the same BTO and BFO signature as a straight flight at cruise altitude and cruise speed. That, combined with the difficulty of allowing maneuvers and limiting the search area to a manageable size without introducing unjustifiable “hunches”, is the basis for a number of us favoring paths with no maneuvers after 19:41.
The Captio analysis (in my opinion) is an example of reconstructing a path with the assumption that the pilot intent was to reach an airfield on Christmas Island. The implied assumption is that the match of the BTO and BFO data to a straight flight is a pure coincidence.
@VictorI
Thank you for your remarks. I accept and appreciate that you have indeed provided a very useful forum for the exchange of views regarding this tragedy. But, surely, we all hope to be able to further the search by somehow identifying facts or implications of the data that could suggest an effective search strategy.
I have made the point too many times, that a scenario should explain the entire duration of the flight consistent with the known data, the physical constraints of the flight and operational constraints due to training or knowledge. Except for people publishing books, there does not seem to be such a scenario.
Just to add a little more confusion to the end game, I recently realized that a turn to 90T at any time near 00:11 would result in a same time duration to reach the 7th arc as a path continuing on 180 or 186. This suggests that, if there were a glide, the quadrant in which it might most likely be found is between roughly 90T and 180T)
@Sid Bennett: Recommendations to OI about a new search area can be made at any time by any contributor here. There is no need for consensus for that to occur, nor would I ever claim that my views represent those of the entire group. Then it’s up to OI to decide which of the many recommendations they receive they will follow (if any). Based on news reports, we also know that at least three universities have been selected to provide similar studies.
The track of the (6th arc and) 7th arc at 34S is around 46°, so due south and a due east crossings will cover about the same distance. However, if a due south path was selected to maximize the southern extent of the flight, it seems unlikely that the pilot would choose a turn to the east. Also, a turn to the east would mean flying towards the rising sun.
@Andrew. Thanks.
Lawyers representing passengers that are suing Malaysia Airlines, Allianz, and Boeing lost an appeal to litigate in US courts.
Two D.C. Circuit judges offered little hope Monday to victims’ relatives fighting to revive their multidistrict litigation to hold Malaysia Airlines, its insurer Allianz SE and Boeing Co. liable for the mysterious disappearance of Flight MH370 more than five years ago.
Circuit Judges Robert Wilkins and Arthur Randolph, who heard an appeal challenging a D.C. federal judge’s dismissal of the litigation last November, appeared to agree with the trial court’s conclusion that Malaysia, not the U.S., is the appropriate venue to resolve the wrongful death and product liability litigation.
The judges have ruled that Malaysia is the appropriate venue to seek damages since likely the disappearance was caused by “human error”, and Malaysia is the proper place to interview witnesses.
Boeing’s lawyers are also arguing that the turn back at IGARI was likely flown manually, which further absolves Boeing.
Eric B. Wolff of Perkins Coie LLP, who argued on behalf of the defendants, agreed that Hubbard’s client has the strongest case to pursue the claims in the U.S. But he urged the panel to affirm the district court’s ruling on what he called the “greatest aviation mystery of all times.” Among other things, he asserted that authorities have found that planes on autopilot cannot make a left turn at the rate and speed the Malaysia Airlines aircraft that disappeared was flying.
As I discussed in a previous post, I do not believe that there is sufficient evidence to conclude that the turn back was not executed with the autopilot engaged, as the military radar data lacks sufficient precision to make that determination, as we can see by the discrepancy between the military data with the ADS-B data before the transponder was disabled. That said, there is little chance that the turn back was not part of a deliberate diversion by the crew.
@Victor
Unclear from above whether Boeing actually feels IGARI was manual or just hanging their legal hat on Malaysia’s reports. I tend to agree with Boeing, once we still have a pilot flying at Penang, we have apparent “human error”. It would be nice however if we knew what Boeing and other JIT participants thought about the flight.
“Human error” is a new legal euphemism. We can add that to apparent “criminal act”. Wonder if that term is more acceptable to some.
Originally June_2019 was Malaysia court date, but that did not happen. Sounds like they may have been waiting for this appeal.
@TBill: I suspect that Boeing also doubts those conclusions, but they would be foolish not to repeat them, since they were claimed by Malaysian investigators, and it shifts liability away from them and towards Malaysia. In many ways, the SIR was a gift to Boeing.
https://auntypru.com/forum/showthread.php?tid=24&page=36
@Ventus45
I assume your point is the non-release of MH370-related information by various Australian authorities. Given that Malaysia is the accident investigation authority, that question should be firmly pointed in Malaysia’s direction rather than Australia.
ICAO Annex 13 states that “Accredited representatives and their advisers…shall not divulge information on the progress and the findings of the investigation without the express consent of the State conducting the investigation”. By not divulging information, Australia is only complying with its obligations under Annex 13, as embodied in Australia’s Transport Safety Investigation Act 2003. Why is that so difficult for some people to accept?
@David. Regarding the final SDU login at arc 7. Can you remind me why the RAT could not be the power source? I have a dim and distant memory that this was the first working hypothesis, rapidly subsituted by APU start-up using residual fuel.
@Paul Smithson: The SATCOM is powered by the left AC bus, and the RAT does not supply power to the left AC bus.
@paul smithson
The SDU is powered by the L Main AC bus. The RAT cannot power that bus.
@Paul S
The RAT does not supply either Main AC busses, or their direct subsidiary busses (from where the AES is supplied).
The RAT supplies only the C1 and C2 DC Transformer Rectifier Units to maintain essential 28V DC supply.
Just to be clear: a static inverter, supplied off the DC system, is invoked to maintain the AC Standby Bus when the L XFR bus supply is lost: the AC Standby Bus does not supply the AES.
@Andrew, victor. Thanks. But is it actually impossible for RAT to power the left side? From my reading of the electrical configuration diagram, it would depend on the setting of TRU C1/C2 relays?
@Paul Smithson: What you are proposing is impossible. The transformer-rectified units (TRUs) are powered by the AC transfer busses, and produce DC power. You can’t “run them backwards” and produce AC power from a DC power source, not to mention that the SDU is powered by the left main AC bus, not an AC transfer bus.
@Victor @Don. Thanks. I hadn’t seen Don’s response when I asked my chaser – which now makes clear why/how the RAT cannot power the SDU.
@Victor,
@All
Please find here the link to a short technical note complementing the presentation made in Brussels in Sept.
https://drive.google.com/open?id=1mPtd8laDaooQLURL6Ic2HC2CWWaCwhPX
This information could not be presented as it is too detailed. But it provides answers to some of the questions raised here about:
1- the physics of a free fall of the flaperon (which we beleive did not happen according to our damage analysis),
2- the status concerning the question on how water could get to the flaperon in ditching conditions and
3) the rational for the isolation of the electrical buses inducing the RAT deployment.
So far we did not see any equivalent detailed analysis of the (hypothetic) free fall of the flaperon. We would definately welcome any deeper (or at least as detailed) analysis on the behaviour of the flaperon. Until then the most probable free fall of the flaperon to be considered is a diving spiral with its leading edge first.
Hoping this clarifies.
Have a good reading and a good day 🙂
@Jean-Luc Marchand: On the topic of a free-fall analysis of the flaperon, I thought about doing a simulation of this using a 2-D airfoil shape to model the dynamics. However, due to the asymmetry of the flaperon, I believe only a 3-D analysis will properly capture the dynamics.
In order to reach a quasi-steady pitch, bank, and yaw angle, the net moments produced by the distributed lift, drag, and gravity forces have to exactly balance along the three orthogonal axes. I just don’t see how that would be possible with the an airfoil of the shape of the flaperon that was recovered, although I’d be interested in seeing a formal analysis.
You say Until then the most probable free fall of the flaperon to be considered is a diving spiral with its leading edge first.
For the reasons I mentioned, I disagree.
@Jean-Luc
Have not heard DME shut down mentioned before.
How do we shut those off? What is the implication if left on (possible signal pick up at KB or Penang?)
RAT deploy rationale seems weak as stated, vs. L BUS ISOLATION, but I’d personally go ahead and add CVR and FDR shutdown as possible desired objectives especially FDR. On RAT, how does pilot make such a smooth S-shaped turn around Penang and then cutting over to VAMPI?
@Andrew,
Re – “Why is that so difficult for some people to accept ?”
Your legallistic points apply, IFF (if, and only if), MH370 is a bona fide “accident”. MH370 clearly was not – “an accident”, bona fide, or otherwise.
Once an “accident investigation”, gets to the point, where the directly available evidence, or even in a case where there is no solid evidence to hand, but where mounting circumstantial evidence, begins to clerly indicate, that it clearly was not an “accident”, then it clearly becomes a “crime”, and thus, it then becomes (should become) a “criminimal” investigation.
We passed that transition point, between being an Annex-13 “accident” investigation, and a “criminal” investigation, long ago, in fact, you might say, very early on, even as early as when Najib announced it to the world to be – “a deliberate act – by someone on the plane”.
What I find “difficult to accept” (as you put it) is that (contrary to the apparent belief of some people) “aviation” is not, “a special field of human activitiy”, that is somehow exempt from the criminal law, the ICAO, and it’s “Annexes” not withstanding, and further notwithstanding your legalistic point that, “Australia is only complying with its obligations under Annex 13, as embodied in Australia’s Transport Safety Investigation Act 2003”. In my view, murder, suspected murder (or murder suicide) trumps all, period.
In short, continuing to play “the Annes-13 card”, is no longer credible, and has not been, for a very long time now.
One should remember, that concealing evidence of a crime, or even concealing details of strong suspicions of a crime, is also a crime, “in and of itself”. That is a clearly held fact, in virtually any legal jusristicion you may care to nominate. If you do so, you become an accessory to the initial crime itself, “after the fact”. The staffers concerned, are thus in a rather inenviable dilemma, are they not ? It would be interesting to see how they would fare, if they were ever hauled before a court.
I am curious, what is your view of the current case, of the NTSB apparently “sitting on” Atlas Air 3591, the 767 freighter that crashed into Trinity Bay Texas ?
@Ventus45
Like it or not, but that’s how it works. MH370 might well be a criminal act, but that’s not for the ATSB to decide. There are avenues for the courts to compel the release of information in the event of a criminal investigation. In the meantime, the ATSB’s release of information is regulated by the Transport Safety Investigation Act 2003. That includes the release of information by those acting as consultants to the ATSB, such as DST.
The NTSB’s deafening silence on Atlas Air 3591 is surprising. There are rumours about the cause of the accident that might have some bearing on the issue. The First Officer’s family has also filed a lawsuit that raises training and fatigue issues, so it seems likely there are ‘complications’. I can only assume the NTSB isn’t ready to go public with its findings.
@Ventus45: The ATSB did not lead the criminal investigation–Malaysia did. In fact, Malaysia did not share much of the evidence in the RMP report with the ATSB. I believe that the ATSB truly was committed to sharing as much as they were allowed, within reason.
@Andrew;
The NTSB’s deafening silence on Atlas Air 3591 is surprising.
Perhaps this an incident that the NTSB have concluded is a “black swan” event, and as such the aircraft per se is not the issue. The complications revolve around the litigious nature that impinges on safety issues in the USA. Needless to say, those in the higher echelons of power may not be interested in having such a mess highlighted in the media.
@Barry Carlson, @Ventus45, @Andrew:
Back in February, I put together a short video that shows the 5Y3591’s flight path together with the publicly available ATC exchange. Some observations and comments:
1. The PIC was communicating with ATC at 12:34:04L, but at 12:36:19L, it was the FO. Some have theorized that the PIC may have left the cockpit.
2. The FO was clearly in an impatient and agitated state at 12:36:19L, as he transmitted over ATC several times.
3. The publicly available radio recording seems to be incomplete, as the NTSB states that “About 12:37, the controller instructed the pilots to turn to a heading of 270°.”
4. Just before the steep descent, the aircraft was entering an area with high winds, as shown by the superimposed Doppler radar data. According to the NTSB, “radar and ADS-B returns indicated the airplane levelled briefly at 6,200 ft and then began a slight climb to 6,300 ft. Also, about this time, the FDR data indicated that some small vertical accelerations consistent with the airplane entering turbulence. Shortly after, when the airplane’s indicated airspeed was steady about 230 knots, the engines increased to maximum thrust, and the airplane pitch increased to about 4° nose up. The airplane then pitched nose down over the next 18 seconds to about 49° in response to nose-down elevator deflection.”
5. The CVR was recovered. The NTSB stated that “Crew communications consistent with a loss control of the aircraft began approximately 18 seconds prior to the end of the recording.” The transcripts of the recordings have not yet been made public.
6. There have been rumblings in the industry that the FO had performance issues.
7. The accident was likely not the result of a mechanical malfunction as the NTSB has not ordered inspections on other aircraft. That means that pilot inputs likely caused the crash, whether or not the crash was intentional.
Ouch! Previous reports indicated that an incident that occurred during 777X testing was caused by a cargo door blowing out. The Seattle Times reports that it was somewhat more dramatic, despite Boeing’s attempts to downplay the incident.
Boeing 777X’s fuselage split dramatically during September stress test
In other matters of accident reports MAK, the Russian Interstate Aviation Committee, recently published their final report into the March 2016 Fly Dubai 981 crash at Rostov-on-Don (URRR/RVI).
The MAK analysis shows that the PIC, apparently through disorientation, manually commanded the stabilizer position from -2.67º to +2.49º causing the unrecoverable descent and catastrophic impact on the runway. The aircraft config, as the go-around was initiated, resulted in the trim motor moving the stabilizer at maximum rate to the nose down position.
French miniseries on MH370 coming up:
https://www.c21media.net/france-tv-banijay-prep-mh370-miniseries/
Mostly in English:
https://variety.com/2019/tv/news/banijay-rights-boards-mystery-thriller-mini-series-flight-mh370-1203420978/
Miniseries appears to be fictionalized based on Wattrelos [novel] and de Changy. Lovely!
@Don Thompson
RE: “the Russian Interstate Aviation Committee, recently published their final report into the March 2016 Fly Dubai 981 crash at Rostov-on-Don (URRR/RVI).”
Thanks Don, a very interesting report. There were several contributing factors, but the following paragraphs highlight the critical importance of pilots thinking about and pre-briefing the actions they will take in the event of a go-around during an approach:
‘As a result, the PIC, whose actions did not allow him achieving the goal, had been in “a mixed-up” condition and lost the ability to predict the further behavior of the aircraft (he was “behind” the aircraft). This led to the loss of the situational awareness and psychological incapacitation.’
‘The onset of the abnormal situation was at the point of initiation of go-around and, most probably, had resulted from the inherent lack of psychological readiness of the PIC to perform go-around that led to the loss of his leadership in the crew, the disruption of the flight mental mode and piloting errors, which within a short time were transformed into the inappropriate actions, resulted in the loss of control of the aircraft.’
Other reading:
Airbus Flight Operations Briefing Note: Descent Management – Being Prepared for Go-Around
Flight Safety Foundation ALAR Briefing Note 6.1:
Being Prepared to Go-Around
@Andrew:
RE: 777X stress testing
Boeing isn’t ordered a re-test, because the test failed at 99% – just 1% shy of federal requirements. That’s interesting. I always thought manufacturers exceed the requirements by wide margins …
Re the 777X static test failure; it occurs to me that pressurising the interior beyond normal levels, as Boeing chose to do, would have the effect of stiffening the fuselage and so increasing it’s resistance to buckling. Effectively it would become a pressure stiffened shell.
I do hope that Boeing were not trying to game the test in this way. Having said that, I can see some rationale to conducting the test in this way ie to simulate a specific altitude.
@Peter Norton
RE: I always thought manufacturers exceed the requirements by wide margins …”
No, they design the aircraft to meet the ultimate load requirement, which is 150% of the limit load, and they usually come pretty close. The original B777 design was tested to destruction and failed at 154% of the limit load:
https://youtu.be/Ai2HmvAXcU0
The B777X isn’t the first aircraft to fail its ultimate load test in recent times – the prototype A380 wing failed at 147%.
@ikr
“Miniseries appears to be fictionalized based on Wattrelos [novel] and de Changy. Lovely!”
I hate to go here, but I wonder if objectivity of orig story-tellers is lost when something like this miniseries happens.
@TBill: There are parts of GW’s rendition that include unfounded accusations. Similarly, FdC has some wild theories. I do hope the producers have the sense to dial back some of those claims, and focus more on the personal aspects of the story.
Off the current discussion, but in the afterword if Michael Lewis’s latest book, The Fifth Risk, he talks about Arthur Allen. an oceanographer with the Coast Guard. He developed a drift model and I’m not sure if it was ever considered with MH370. “Fundamental shortfalls in our understanding of leeway drift behavior have hampered the search and rescue (SAR) planning community’s ability to predict search object drift with high confidence. This report organizes the existing body of knowledge on leeway to address many of the shortcomings in the present use of leeway. Ninety-five leeway target types reported on by twenty-five field studies are presented. A systematic categorization of the possible targets of interest to the Coast Guard is presented as a leeway taxonomy. The leeway taxonomy is based upon rules that describe the target and help quickly guide the search planner through the seven possible levels of the taxonomy. Sixty-three search object leeway classes and their leeway speed coefficients and divergence angles are recommended for manual search planning tools.”
@Trip. It can be downloaded here.
https://www.researchgate.net/publication/235044274_Review_of_Leeway_Field_Experiments_and_Implementation
From a quick glance he lists (p117/352) old-style surfboards drifting at 2% of windspeed, at up to 35 deg angle-off.
Also he describes drift of a more modern surf board he studied as different but that seems to have had a person onboard.
At p314, Appendix B he describes aviation wreckage but it seems that the only item adjudged relevant to that on which there are data is a life-ring; drift of 2 – 5% of wind varying with its speed.
So nothing directly relevant that I found.
thanks Andrew. I didn’t know that.
The WTC twin towers were designed to carry 20 times its weight:
« In 1964, four years before the start of construction, an article about the planned WTC appeared in the Engineering News-Record. The article declared that “live loads on these [perimeter] columns can be increased more than 2,000 percent before failure occurs.”»¹
Of course, you cannot compare buildings to aircraft. Still I had thought the safety margins would be somewhat larger (in order to account for material fatigue, turbulences, etc.).
—
¹Eric Douglas, R.A., “The NIST WTC Investigation — How Real Was The Simulation?”, A review of NIST NCSTAR 1, Journal of 9/11 Studies, December 2006, p. 8.
@Jean-Luc Marchand. Rather late but I offer some comments on your video and technical note. (I tried sending an advance copy to your CAPTIO site though it would not ‘send’.)
https://www.dropbox.com/s/q89cthlu5dxwk5v/Comments%20on%20CAPTIO%27s%20Youtube%20video%20and%20Technical%20Note.docx?dl=0.
What are the reasons everyone assumes the flight was on autopilot in the last stages of the flight?
Thanks David for that fantastic flaperon/flap analysis. I agree it looks more like a high speed, inflight structural failure of the right wing. We must finally put to bed any notion of a slow speed controlled sea landing.
@MG, I don’t think there is any evidence the autopilot was ever re-engaged after IGARI. This of course makes the calculation of a EOF position much more complicated.
@Jean-Luc Marchand
In addition to @David’s comments, a couple questions for you:
(1) What is CAPTIO position on why ELT did not send signal upon crash?
(2) Have not heard DME shut down mentioned before.
How do we shut those off? What is the implication if left on (possible signal pick up at KB or Penang?)
@Victor
In case Jean-Luc is not monitoring, can you say a little more what DME is and why pilot might want to disable, and how?
@David
Do you still have handy your prior estimate of bleed air flow rate? I am trying to get a feel for how much time to repressure aircraft at altitude if it was depressured. I do tend to wonder if reduced altitude was used to repressure in the actual flight.
@TBill: Just the way an aircraft transponder replies to pulses from the radar head so that ATC can calculate range, the DME replies to pulses from the aircraft so that the aircraft navigation system can calculate range. CAPTIO is correct that if the intention is to eliminate all RF emissions, it is necessary to disable DME functionality. (I have not checked what is required to do this.) However, I don’t believe it is possible for the DME (which is typically coupled with a VOR) to identify the plane, nor do I believe that DME activity is recorded. That said, I haven’t really looked into it, so others might want to chime in.
@MG
Here is the way I look at it:
(1) Draw a vertical line on Google Earth straight South approx from ISBIX.
(2) Assume Arc3 to Ac5 is constant speed
Basically you can A/P fly thru those Arcs almost perfectly re: BTO/BFO. Or if you do not have a flight sim, just look at it with the Google Earth ruler function. With ruler it is not exactly perfect, but close, but when you and a mild wind field blowing a little to the west, then it is perfect fit.
Without A/P is meandering speed and direction and a pain in the butt to hold aircraft on a path. Also since we know SATCOM is on, we know power to A/P is probably available. Having said that no A/P is possible mode.
@Tim
What would constitute evidence of A/P re-engagement?
@all
The satcom call at 23:14. Who made it and why?
@DennisW
…fyi I asked a somewhat similar question above Nov. 1@10:05 and there follows some discussion with DonT and Richard. If I recall, somewhere above Don says two different phone numbers for the calls at 1841 and 2314.
We do know by 2314 that MAS official Hugh Dunleavy was at KLIA directing the MAS effort, and we must assume a last ditch attempt was made to contact MH370 just before MAS issued its first offical public notice that MH370 was missing.
I would like a reminder on expected UT arrival time at Beijing for this flight. This flight, I am thinking, left the KLIA gate before 12:30AM whereas 12:40 was the schedule. So presumably expected arrival time at Beijing, projected from IGARI, would have been a bit early.
@TBill
As Don points out, the 23:14 call did not come from MAS flight operations. The timing of the call, and the fact that it was a singular odd occurrence beg for an explanation. It (the call) is a solid observable, and should not be ignored.
@DennisW
Someone would have to verify UT, but if I recall the MAS first MH370-loss announcement came shortly (within 30 mins) after this call.
@TBill
MAS (normal officials – RCC’s) had no clue the aircraft was still flying at 23:14. The radar data was clearly used well after the fact, not in real time. The early search effort in the South China Sea indicates the MAS mind set. Only after Inmarsat divulged the SATCOM data indicating the aircraft was flying at 00:19 did the MAS official narrative change.
@DennisW
Hugh Dunleavy of MAS has said he came into the office well before a 6AM flight and they assumed the aircraft could still be flying. But never said that he knew that for sure.
According to Wikipedia:
“Malaysia Airlines issued a media statement at 07:24 MYT, one hour after the scheduled arrival time of the flight at Beijing”
So it I have my UT correct:
KLIA Departure Time Schedule: 0035 (16:35) {left gate bit early}
Beijing Arrival Time Schedule: 630 (22:30)
SAT Call to MH370: 23:14
MAS Announcement: 7:24 (23:24)
@TBill, @DennisW
I don’t believe there is anything that states Dunleavy was ‘directing’ the MAS effort. I recently read Richard Quest’s book on MH370, Quest gave a similar timeline for MAS CEO, Ahmad Jauhari Yahya, making his way to the airport. I would expect all MAS C-level execs got the same SMS at the same time.
The MAS “contact lost” press release was issued at 0724MYT & I assume that was sent directly to press organisations. Subsequently, the press release was posted to MAS Twitter and Facebook at approximately 0812/0813MYT.
Note that the Factual Information ATC transcripts show that DCA staff ‘spun’ on the activation of the Aeronautical Rescue Coordination Centre for an hour (between 0530 and 0630MYT) without progressing anything. The KL ARCC issued a DETRESFA at 0632MYT.
Between 0530 and 0600MYT there is record of discussions between DCA staff and AAT concerning a review of the ‘recordings’. AAT is the technical service provider for radar surveillance systems to DCA. I have no knowledge of the replay or diagnostic tools available to AAT but should a tool have provided the facility to scroll through a timeline of radar targets and tracks recorded from MH370’s departure time through to an hour beyond the diversion time, the PSR track segments in the vicinity of WMKC and WMKC should have been quite obvious and raised immediate questions.
The 2314UTC/0714MYT SATVOICE call originated from a number that is allocated to the Sepang (KLIA) area. It’s possible that it’s a MAS line.
@David. Thank you for your paper. In it, you said:
He said that all engine and APU generated power was turned off at altitude at the IGARI turn back. That would cause loss of all AC driven engine fuel pumps, so loss of the pressurised fuel supply to the engines. At altitude not long after take-off the fuel would be warm with air entrained so the gravity supply from the fuel tanks would very likely fail to keep the engines alight, due to vapour lock.
What about the air-driven fuel pumps?
I don’t think most people have “cottoned on” to the full significance of MH370 “going dark” at IGARI, and the DME discussion is proof of that. In the military Electronic Warfare (EW) environment, the term EMCON, refers to the control of one’s own RF Emissions, so as to minimise the chance of, and preferably to prevent, detection by enemy sensors. It is routine procedure for all military EW units (land, sea and air, i.e. Army, Navy and Air Force) to monitor most, if not all frequencies, in real time, so as to:
(i) detect / receive all transmissions,
(ii) to record them, to identify them, and
(iii) to classify them, and
(iv) if possible – to geo-locate them.
Thus, over time, they can build up their “threat libraries”. This is the 24/7 “bread and butter” work of the ELINT community, within the EW community.
I think that we can confidently assume, that Z was well aware, that the militaries of all of the local nation states, (Malaysia, Thailand, Indonesia and India) possessed significant EW and thus ELINT capabilities. He knew that he could not “defeat” PSR’s, but he did not want to be detected or tracked “by any other means”, either in real time, or by later ELINT analysis.
If we ignore PSR’s for the moment, this means that Z had to “eliminate all EM/RF emissions” at IGARI (including visuals, i.e. navigation lights and strobes, but also cabin lights). This means turning off the transponder(s) obviously, but it also means turning off the weather radar, the VOR/DME’s, the Radio Altimeters, and the SATCOM, and that they should (ideally) all “go dark” simultaneously. This supports the idea that the manipulation of the electrical power systems was used, instead of turning off each system manually – “one by one” – as it were – which of course – takes time, (since later ELINT analysis may be able to produce a timeline of events). Moreover, the other class of RF emissions that he could not EMCON directly were the multitude of mobile phones etc in the cabin. He could however defeat them indirectly by two means. First, they are human operated, so the first step is to disable the humans (i.e. depressurise). Doing so at IGARI was essential, since IGARI is too far from any GSM like system ground station, i.e. any telco tower (max operating range is only 32km due to system timing protocols). Second, even if some humans managed to prepare a message (SMS or e-mail) before loss of consciousness, flying directly back to KB and thence (over sparsely populated and serviced border territory) directly to Penang at high altitude and high speed, means that the Doppler limits would prevent any log-ons, and additionally, overflying most towers in a city at such high elevation angles when within the 32km max range, would be outside the ground station antenna lobes, thus minimising the probability of a log-on, and finally, given that the aircraft itself acts like an “RF cage”, the likelihood of a log-on is much further reduced. In fact, we can deduce all this, from the simple fact that, he made a mistake, with the turn at Penang. He should have flown, straight on, at 245 true, for at least 20nm, before turning NW. Thus, “he slipped up on the Doppler” by making that turn where he did, thus enabling the FO’s phone log on attempt (in the cockpit, large windows, so large RF aperture). None of the phones in the cabin were recorded (small windows so small RF aperture).
This all brings me to one further point, in the final hour or so of the flight, and it concerns the French.
Way back, fairly early on, long before the flaperon was found, the former President of France, Nicolas Sarkozy, inadvertently revealed, that France had “secret information” about MH370.
My theory is that they have ELINT information, collected by one of their patrol ships, (which patrol the French Southern and Antarctic Lands), in the vicinity of “Îles Saint Paul et Amsterdam”, and that the EM signals that they recorded, were most likely the known characteristics of the weather radar, and/or the radio altimeter, both of which Z would have used at “end of flight”. Post event analysis would have enabled the French to eliminate any other air traffic in the region as a possible source of those signals. It is even remotely possible, that they may have also recorded, some, or all, of the outgoing Satcom transmissions from 9M-MRO at the 6th and/or 7th Arcs.
When you consider how the Malaysians locked the French out of the investigation, (quite bluntly), in the first few days, (which the French quite naturally took exception to) and the fact that at the time, that ELINT information would not have raised any eyebrows, even “on the ship”, at the time, since there was no reason, at the time, for the crew to consider that it may be MH370 (after all, they probably didn’t even know about it, at the time, and even if they did, the search was, at the time, in the SCS), then that ELINT information would have remained on the ship, in the ELINT data recordings, but not yet analysed, since it’s possible significance, was not yet realised, by anyone on board. I keep repeating, at the time, deliberately.
Now, fast forward 9 days, and all of a sudden, Jay Carny makes his White House announcement, the NTSB two tracks hit the news, and eventually Najib is forced to say that the flight ended in the SIO, and the search swings to the SIO.
You are now one of ONLY two or three EW crew on that ship. You are watching the NEWS on the satfeed in the mess. You are now aware of what is going on. You remember that “odd recording” nine days before, and the penny drops. All ESM/ECM/ELINT work is “need to know only”. You, and the other guy, or two guys, are the only people who know. You confer with your EW mate(s), you all agree, Um, Captain, sir, you might want to look at this, sir.
You get the Captain into “the bat cave”, and you brief him. A quick analysis is done. Own position was, time was, bearing was, possible range was, so “line of position” was. Hmmmm …. it seems to “fit” the “NTSB two tracks”, and the current air search by AMSA (from the satfeed news in the mess). In the intervening 9 days, the ship has of course been on patrol, and it is now well over a thousand miles away from where it was at dawn on the 8th March, when those signals were recorded, and nowhere near the search area now, so any immediate or direct involvement in the search is not on the table. Captain, “OK, not a word to anyone about this, I will signal Fleet HQ”.
The French Government, when made aware of this, would have had no reason to release the information, at the time, and indeed, when the flaperon was found, it’s security classification was probably upgraded, due to the criminal investigation.
MILITARY ESM – https://fas.org/irp/doddir/dod/jp3-13-1.pdf
CIVILIAN DME – https://www.casa.gov.au/sites/default/files/distance-measuring-equipment.pdf
@Ventus45: Why would the captain care about the RF emissions when within range of PSR? After all, it’s radar that is used for rapid response. If there was a desire to prevent RF emissions, it would be when out of range of PSR, which is precisely when the SATCOM began operating.
@Victor,
He knew PSR’s would track him obviously. The point was, he was gambling that any fighter response would be too slow to actually intercept him, and he would escape. He was correct. He was not intercepted.
The reason for early EMCON is to make it look like (with later analysis) that it was an accident / emergency / systems failure scenario, and not a hijacking, either by himself, or a third party.
Out over the sea, out of range of land based PSR’s, is also out of range of land based ELINT systems. After all, RF is RF, it is line of sight at VHF and above. Ships on the other hand (naval) are a possible risk, but presumably he decided that risk was low enough to accept.
Once out over the sea, away from, and out of range of, any possible detection by land based ELINT systems, he restored electrical power, because he needed his systems back on line, for the long flight south, both for navigation and the auto pilot. He was not going to hand fly all the way.
As for SATCOM, I don’t think he thought that it would provide any useful information, (certainly no position information), other than confirm that it was still flying, but would not tell them where it was, or went, or where to eventually search for it. In his mind, it would itself help to support the “accident” scenario by not responding to the phone calls, which adds to the ghost flight scenario, (which was adopted) which means “no blame” for him, thus protection of his family etc.
@Ventus
He knew PSR’s would track him obviously. The point was, he was gambling that any fighter response would be too slow to actually intercept him, and he would escape. He was correct. He was not intercepted.
I can’t imagine ZS being concerned about interception. What would an interception do? They certainly would not shoot down a commercial airliner, and Shah knew that any intercepting aircraft did not have the range to follow him.
@DennisW,
All true and I agree. I was simply responding to Victor.
All an interceptor could or would have achieved was positive identification of the aircraft, nothing else. Given that it was a moonless night, even that is debatable. Fighters as a rule, do not have searchlights, (although I recall that RCAF F-18 Hornets did have one looking to the starboard) and you certainly can’t put the gear down at 500 knots to use your landing lights ! The only way they might have been able to see well enough would be with night vision goggles, but I don’t think fighter pilot helmets had them back then, only helicopter crews ?
The only concern he may have had was if a fighter pilot could see through the windows. Having all lights out, cabin and cockpit, would make that near impossible.
DennisW:
“The satcom call at 23:14. Who made it and why?”
Safety Investigation report, p. 123:
“Two Ground-to-Air Telephone Calls were placed to the cockpit
from MAS Operations Centre (MOC) at Airline Operational
Communications (AOC) Q10 priority level at 1839 UTC and at
2313 UTC, 07 March 2014. Neither of the calls was answered.”
Is this what you asked about?
@Ventus45
Interesting sounds like you might be onto something.
However, one possible inaccuracy in your scenario, the FO cell phone connect I believe was approx 180 South of Penang at the close approach, so curving around Penang did not cause that connection, rather getting so close to Penang caused that. If I recall the cell phone connet came during one of the BW radar gaps, which I do not understand why we had the gaps at Penang, but anyways.
Sounds like you support Captio’s idea of RAT power at IGARI. But how could a pilot make those smooth curves around Penang without A/P? I was thinking maybe A/P was off at IGARI, but back on by Penang.
@Tim. Thanks.”We must finally put to bed any notion of a slow speed controlled sea landing.” The evidence for that currently does look weak.
@TBill.”Do you still have handy your prior estimate of bleed air flow rate?”
From your context, the air flow schedule to the two packs is constant volumetrically so its mass flow varies with altitude. From the Training Manual the -200 figure for 35000 ft is 255 lbs/min, for 348 seats and less. @Andrew might have a figure directly applicable to the MAS aircraft.
@Victor. “What about the air-driven fuel pumps?” I know of no air-driven fuel pumps. Maybe you have the air-driven hydraulic in mind?
@sk999
Yes! You nailed it. Thanks.
@TBill,
The fact that the position was basically south of the tower, and within the 32 km range limit, is not the defining point. The Doppler issue with the FO phone log on, is based on the “range rate” from the telephone tower. The radius of the turn around Penang, and thus from the tower, was essentially constant for a few seconds. That was all it took, for the Doppler window to “open”, and the log on attempt to occur. Then the Doppler window “closed”. It was essentially very fortuitous that we got the recording at all.
I don’t think the autopilot was on between IGARI and the FMT. The detailed track plot around Penang is smooth, but not perfect, like on autopilot. It looks to me like a perfectly hand flyable track for an experienced pilot. Moreover, the slight overshoot in heading to Vampi and the slight correction left to Vampi, supports the notion of hand flying, since if the autopilot was engaged, and Vampi selected, it would not have done that.
@TBill
Further to your other point, the missing BW radar data for those few seconds.
That could also be related to the range rate as well. The radius and thus the range rate from the BW radar site to the NNE has a very similar geometry, and it is possible that the radar processing software may have considered the returns in those few seconds as stationary targets (no range difference) even though the azimuth changed a bit. A rubbery explanation, granted but possible. Not everything works perfectly as advertised all the time, particularly if the system is not well maintained, tested, and calibrated, often, which apparently, it was not.
@David: Yes, of course you are right about the fuel pumps.
@David
Belatedly putting my chem engr hat back on:
(1) why would we get air entrainment in the jet fuel lines? Cavitation is due to the vaporization of the liquid being pumped.
(2) Is it really true that at FL380 the engines would fail on warmer fuel? If it is true, it could explain some of the erratic behvavior after IGARI.
I used to do flash calcs of hydrocarbon vaporization almost on a daily basis…interesting to consider if I could do the calcs in retirement without buying simulation software.
The discussion of events at about the time of IGARI seems to raise some issues.
If both AC busses were disabled, would not the APU start (auto or manual) and provide sufficient power for the fuel pumps? Was there enough time after the turn back to do this? If only the left bus was disabled, would this not account for the observed behavior of the satcom and transponder?
This also has some implications regarding the CAPITO hypothesis of the early deployment of the RAT.
Also, I believe that the DME equipment contains no identifier of the aircraft. This would also be true of any radar altimeter. (Yes, one could direction find on it, but the number of such aircraft and the low intel value expected makes it unlikely.)
@Sid Bennett asked: If both AC busses were disabled, would not the APU start (auto or manual) and provide sufficient power for the fuel pumps?
The APU would automatically start when both transfer powers were unavailable. However, if the AC busses were deliberately powered down, the bus ties would be opened, and the APU would be unable to provide power to the fuel pumps.
@All;
Off topic.
Ocean Infinity’s “Seabed Constructor” has located the WW1 German Battle Cruiser SMS Scharnhorst which was sunk by British warships on December 8, 1914 near the Falkland Islands in the South Atlantic.
Video footage taken from an ROV is at:-
https://www.bbc.com/news/world-latin-america-50670743
The Falklands Heritage Trust announced the finding of SMS Scharnhorst, and
https://en.mercopress.com/2019/12/05/discovery-of-ww1-german-battlecruiser-sms-scharnhorst-in-falklands-waters
has good coverage including sidescan sonar images. The website is a bit slow – probably due to high traffic.
@DennisW, @sk999,
The first call to MH370 was made at 18:39:51.831 UTC from caller ID 160387871264.
The second call to MH370 was made at 23:13:57.346 UTC from caller ID 160387874704.
1 = International
60 = Malaysia
3 = Kuala Lumpur
8787 = Kuala Lumpur Airport
1264 = Malaysian Airlines System – Flight Operations
4704 = Air Traffic Control Complex – Department of Civil Aviation
@Richard
Very nice. Thank you.
@TBill, @Ventus45,
I previously posted a list of the Boeing 777 electrical power sources to the various systems and the location of the respective circuit breakers and the redundancy level of the systems.
https://www.dropbox.com/s/46ngm51asalcfac/Boeing%20777%20Electrical%20Power%20to%20Systems.png?dl=0
The DME, VOR, Weather Radar and Radio Altimeter all have multiple redundant electrical power sources, but can all be switched off via a circuit breaker in the cockpit overhead panel P11.
The SATCOM and VOX RCDR cannot be switched off individually in the cockpit and require the 115V AC Left SEC 2 BUS and 115V AC Left XFR BUS to be isolated.
@TBill. Air entrainment/vapour lock. Air is dissolved in aircraft fuel (as it is in hydraulic oil, diesel and petrol, as per the web) at sea level. I expect that would increase in the turbulence of replenishment.
About suction fuel feed, paraphrasing FCOM it advises pilots that in climbing, entrained air is released due to air pressure decrease. The air may restrict fuel flow and at high altitude there may be thrust deterioration or flameout.
It adds that that air will deplete eventually at cruise altitude, the time needed being dependent on altitude, fuel temperature and fuel type; and that once the air is gone the engine will operate satisfactorily on suction fuel.
(As to the last bit, I note that the engine is beneath the tank, contrary to the APU)
I have included that phenomenon within the general vapour lock risk category, to simplify.
So warmer fuel will entrain more while at the same time its vapour pressure will be higher. As you know higher fuel pressure to suppress that. Pump cavitation can both contribute and result, although the APU DC fuel pump can discharge vapour back into the fuel.
I have quoted Langton’s “Aircraft Fuel Systems” before. At his page 59 he says, ‘..the feed system must ensure the fuel pressure at the interface is maintained above the fuel vapor pressure (ie above the fuel boiling point) by a predefined margin throughout the operational envelope…”
I presume that the suction source of fuel is not considered to be part of the 777’s (and others’) ‘operational envelope’, although I suppose the fuel head at the engine conceivable would satisfy that ‘predefined margin’.
Let’s know please should you regain your ‘flash calcs’ skills. I would ask you to look into some of the examples of APU vapour lock in the Holland final descent that I posted a couple of weeks ago.
@TBill. Last line, for ‘of’ please read ‘on’.
@David
Looks like jet fuel sucks up around 0.2 vol air/vol liquid which vents off at altitude, and the fuel tank vent system needs to account for that. Also there would be a little vaporization of the warm fuel as pressure goes down. Whereas the engines are below the fuel, there would be the head pressure tending to inhibit much vapor formation in the lines. Presumably if still warm the fuel may be getting cooler in the lines on the way to the engines.
Basically (re: IGARI situation) you are saying early in flight there is a chance the fuel is not yet fully vented/equibrated thus is supersaturated with air/HC light ends, and the excess vapor might want to come out with agitation (flow) in the fuel lines and if so, vapor lock could impact fuel flow. This is going to be hard to predict becuase we do not know how much % degassed the fuel is before the RAT gets deployed, and we do not know how much vapor is too much vapor. If I am B777 pilot, I wonder if I am doing an ultra-sharp U-Turn before or after RAT deployment?
Remind me about end of flight APU situation, because by then the fuel is cold and well degassed.
@David
Looks like jet fuel sucks up around 0.2 vol air/vol liquid which vents off at altitude, and the fuel tank vent system needs to account for that. Also there would be a little vaporization of the warm fuel as pressure goes down. Whereas the engines are below the fuel, there would be the head pressure tending to inhibit much vapor formation in the lines. Presumably if still warm the fuel may be getting cooler in the lines on the way to the engines.
Basically (re: IGARI situation) you are saying early in flight there is a chance the fuel is not yet fully vented/equibrated thus is supersaturated with air/HC light ends, and the excess vapor might want to come out with agitation (flow) in the fuel lines and if so, vapor lock could impact fuel flow. This is going to be hard to predict becuase we do not know how much % degassed the fuel is before the RAT gets deployed, and we do not know how much vapor is too much vapor. If I am B777 pilot, I wonder if I am doing an ultra-sharp U-Turn before or after RAT deployment?
Remind me about end of flight APU situation, because by then the fuel is cold and well degassed.
Video to come, comparing a “death dive” with a ditching.
https://www.theaustralian.com.au/business/aviation/sim-test-regutes-mh370-dive-theories/news-story/28f0762511c98d46fd3ce7f770ae8382
@TBill.”Also there would be a little vaporization of the warm fuel as pressure goes down.”
Fuel pressure inhibits vapourisation. Air pressure contributes to fuel pressure.
“…you are saying early in flight there is a chance the fuel is not yet fully vented/equibrated thus is supersaturated with air/HC light ends…”
I was saying that air in the fuel before it dissipated could well cause suction fuel supply failure as per the FCOM warning.
Vapour itself might contribute but is more relevant to the APU’s start after engine accessible fuel exhaustion when all the air will be dissipated. If its pressurised supply fails before the SDU final transmissions are completed, it will have to suck against various forces.
“Remind me about end of flight APU situation….” That is described in challenging detail below. I refer you to the “examples” mentioned and in particular the “tables” drawn from the examples.
https://www.dropbox.com/s/tvqcsikcllt2csr/vapour%20lock%20risk%20assessment%2C%20by%20David.docx?dl=0
A broader summary is at:
https://www.dropbox.com/s/57rnyoslq2trqu5/On%20whether%20the%20final%20transmissions%20were%20APU%20powered%20or%20not.docx?dl=0
@David
Interesting I think that article is pay wall, but from the first couple sentences do we have a new independent pilots group?
@Richard
OK thank you…I think I see those cricuit breakers (for DME, etc) on the upper panel using PMDG777. That suggests complete power removal with RAT deploy is not necessary, but RAT deploy not impossible I suppose.
Note that my personal proposal, made well before Captio’s RAT deploy idea, is that at IGARI, SATCOM is off as well as Flight Data recorder (DFDR), which requires turning off L BUS as well as Right XFER Bus. Optionally L XFER is only thing on to allow autopilot and prevent RAT deploy.
>The key point here is that the elec config that the pilot used after IGARTI is an unknown at this point. Although Captio might be wrong about RAT deploy, they are correct to illustrate that we do not know exactly what the pilot did. And the problem with that is, it potentially impacts fuel consumption estimates, autopilot ops, and trajectory of the aircraft with some extra drag on the one (right?) side.
@David
As a first approximation, you could assume the fuel itself is “well weathered” into the vapor space at end of flight. So not much vaporization of the fuel itself on the way to APU.
The “air” content, according to one reference is quite dependent on type of blanket gas (air vs. N2, O2, CO2 etc) however is independent of pressure. So let’s say the fuel still contains 0.2 vol Air/per vol fuel. However, due to the reduced pressure, the 0.2 vol Air/per vol fuel is less grams of air (per Ideal gas law). So less ppm by weight of Air in the fuel. Now you can use your estimated head pressure differential to estimate how much air could be evolved upon mixing/agitation. I am having trouble seeing this be a big enough number to cause an immediate vapor lock problem, but I am not experienced in aircraft fluid flow issues.
On Nov 22 2019, Nigeria became the 22nd state to ratify ICAO’s Montreal Protocol 2014 (MP14), thus allowing for the protocol’s accession and entry into force beginning 2020.
The Protocol notably extends the jurisdiction to try unruly passengers from the state of aircraft registration to also include the states in which the operator is located and that is the destination of the flight (including a state to which a flight may be diverted).
“The Protocol will also serve to enhance global aviation security provisions by expressly extending legal recognition and protections to in-flight security officers.”(IFSO) It also clarified the roles of the Captain and the IFSO’s.
https://www.icao.int/Newsroom/Pages/Entry-into-force-of-the-Protocol-to-Amend-the-Convention-on-Offences-and-Certain-Other-Acts-Committed-on-Board-Aircraft-.aspx
ICAO’s legal committee met in 2013, and a diplomatic conference was scheduled Mar 26-4 Apr 2014 in Montreal, Canada to adopt this amendment to the Tokyo Convention.
Pegasus flight 751 from Kharkiv, Ukraine to Istanbul, Turkey was hijacked on Feb 7, 2014, the same day as the Sochi Winter Olympics 2014 by a 45 yr Ukrainian man. Here are some facts:
He was a graduate of Kharkiv Aviation university, but working as ‘web-designer’. Kharkiv Aviation is an ICAO designated training institution for aviation security. Kharkiv was one of the host cities of the Euro 2012 soccer tournament, jointly hosted with Poland
He had not exhibited any previous strange behaviour, but had become ‘agitated’ in the days prior to the hijacking
But here’s the kicker: during the hijacking, he wore an NHL ice hockey jersey of the Montreal Canadiens, the number 11 jersey belonging to Saku Koivu, the longest serving captain of the team till 2009. Many Ukrainians expressed surprise at the hijacker’s choice of clothing, not least because ice hockey is not a particularly popular sport in Ukraine.
ICAO’s headquarters is located in Montreal, Canada. The Montreal Protocol 2014 was a followup to the Beijing Convention 2010 which criminalized the ‘unlawful seizure’ of commercial aircraft, addressing the problem of the 9/11 hijackings. Was the Ukrainian hijacker working with the Russian security services and ‘trolling’ the media about the upcoming adoption of the Montreal Protocol?
Was MH370 hijacked by IFSO’s prior to the adoption of the Montreal Protocol 2014, before the clarification of the roles of Captain of aircraft, and IFSO’s?
Interestingly, the Canadian government publicised in July 2014 that its aircraft are policed by armed Inflight Security Officers (IFSO). One would assume this was already the case, so it’s strange why the Canadian government decided to make this ‘public.’ Was this a ‘signal’ to any country thinking of deploying IFSO’s without authorization on Canadian aircraft?
https://www.theglobeandmail.com/news/politics/ottawa-to-let-security-officers-carry-loaded-guns-on-canadian-flights/article19439062/
@Victor
Basic detail, it hard to know whether to say if MH370 departed a little early or a little late,
00:35 MAS Schedule Depart
00:25 approx Left Gate (I am thinking)
00:43 Departure Time FR24 (seems to be approx. wheels up time)
6:30 MAS Schdule Arr
6:06 FR24 Arrival Est.
Anyways if there was really long “glide” to say 9AM we are talking almost 3-hours flight time past an early arrival time.
In comparing to the prior weeks MH370’s the 8-March was among the earliest but some other days were quite similar.
@TBill. Thanks. I forgot the paywall. Herewith text including attribution.
“Sim test refutes MH370 ‘dive’ theories
The Australian
BYRON BAILEY
CONTRIBUTOR
12:00AM DECEMBER 6, 2019
Two months ago in a Boeing 777 simulator I compared the IPG (Independent Pilots’ Group) pilot-controlled descent and ditching of MH370’s final moments with the Australian Transport Safety Bureau’s death-dive-upon-fuel-exhaustion theory.
Both began at the DSTG (Defence Scientific Technology Group) hotspot on the 7th arc from 39,000 feet and Mach 0.84. The IPG descent at 230 knots indicated airspeed (IAS) stabilised at 1700 feet a minute.
I progressively lowered the flaps; the auxiliary power unit (APU) autostarts at 22,000 feet on remaining fuel and bled the speed back to ditch about 120 knots. In the 3m-4m swell this would have wrecked the aircraft, probably tearing off the engines and flaps and breaking the fuselage at the weakest point — forward wing junction. This took about 20 minutes and covered about 130km. Next, as per the ATSB report, which states when the second engine flamed out the aircraft turned left, I allowed the B777 to enter a left-spiral death dive and two minutes later we impacted the sea at 620 knots (nearly 1100km/h). At this speed the water acts like concrete and the aircraft would have exploded into smithereens. Tens of thousands of small bits of flotsam would have floated for months.
This did not happen.
The evidence and opinions of aviation experts point to the fact that the ATSB wrongly based their MH370 search on this nonsense and persisted with the farce, ignoring the outcry from aviation experts. The video of the comparison of the two descents will be in a forthcoming TV documentary.
It is now close to six years since the Malaysia Airlines’ flight disappeared en route from Kuala Lumpur to Beijing with 239 people on board, including six Australians.
To this day the Australian government refuses to release documents requested under FOI by The Australian. What are they trying to hide? We have a right to know.
Byron Bailey is a former RAAF fighter jet pilot and flew B777s as an airline captain.”
Does anybody know what he is talking about?
@TBill. “….you could assume the fuel itself is “well weathered” into the vapor space at end of flight. So not much vaporization of the fuel itself on the way to APU.”
No, vapour itself is independent of air content, another phenomenon entirely, though both contribute to the generic vapour lock of my terminology. (I do not think it would be helpful to muddle the issue even more by separating “gas” lock risk from “vapour”, the two when mixed then forming yet a third sub-set.)
However since the risk of entrained air causing “vapour” lock is uncertain it would have been better in my comments to @Jean-Luc Marchand, instead of describing the consequences of removing all AC generated power at IGARI, to indicate that because of the risks a pilot surely would have been deterred from doing that. I will add something there to that effect.
@Victor. I assume you mean the FOI demands.
He and Ean Higgins, a ‘The Australian’ reporter, continue their populist joint assault on the ATSB. All part of an anti “them” campaign, presumably to add colour, drama, righteousness and the appearance of helping NOK, families and friends of those lost.
Part of this is encapsulated in the below. Higgins rails against the ATSB for not releasing information supplied by the French when obviously it would have been constrained from doing that; and he is so uninformed as to be unaware that the French report had indeed been made public by Malaysia in July last year.
From The Australian:
“EAN HIGGINS
REPORTER
@EanHiggins
12:00AM OCTOBER 26, 2019
44 COMMENTS
Five years after Malaysia Airlines Flight MH370 disappeared, Australian authorities are still suppressing information desperately sought by bereaved families and refusing to answer claims their search strategy was wrong.
The Australian Transport Safety Bureau has employed lawyers from the big end of town to threaten editors of the free press in a failed bid to suppress expert criticism of their actions, and has banned private-sector contractors from speaking to the media.
The ATSB’s denial of the public’s right to know outrages relatives of the disappeared to this day.
“To only be told part of a story that has changed our lives, and not for the better, is gut-wrenching and unacceptable,” said Brisbane woman Jeanette Maguire, who lost her sister Cathy and brother-in-law Rob Lawton on MH370.
This week the nation’s media outlets united to launch the Your Right to Know campaign, calling for greater press freedom following a sustained attack on the rights of journalists.
On Monday, The Australian, along with newspapers around the country, blacked out sections of their front pages in a mock demonstration of the constraints restrictive laws place on their ability to publish the truth.
With the Malaysian government having completed its investigation into MH370 more than a year ago, Ms Maguire said it was time for the ATSB to come clean.
“If a mistake was made, then so be it, but to redeem themselves, fix it,” she told The Weekend Australian this week. “We need all of the information so the search can continue — find our families.”
MH370 disappeared on a flight from Kuala Lumpur to Beijing on March 8, 2014, with 239 people on board. Radio contact ended 40 minutes into the flight with a routine transmission. The Boeing 777 disappeared from radar screens soon after as its secondary radar transponder was turned off.
A replay of military primary radar, and automatic satellite “handshakes’’, later showed the aircraft reversed course back over Malaysia, and headed up the Straits of Malacca before turning south on a long track to the southern Indian Ocean.
While under international law Malaysia held responsibility for the overall investigation, at its government’s request Australia led the $200m underwater search for the aircraft, but failed to find any trace of it.
The ATSB had worked on a search strategy based on an assumption that MH370 was a “ghost flight” with “unresponsive” pilots at the end of the flight, and crashed down rapidly after running out of fuel on autopilot.
Many leading aviation experts believe the facts indicate otherwise, particularly the pattern of damage on wing parts of the aircraft that washed up on the other side of the Indian Ocean.
Those experts believe Captain Zaharie Ahmad Shah hijacked his own aircraft and flew it to the end, ditching it, a scenario that would dictate a different search strategy.
The ATSB has refused repeated Freedom of Information requests to release this evidence, including the advice the ATSB received from French authorities concluding that a flaperon had been lowered, and international expert opinions on the satellite data the bureau claims support its “death dive” theory.
In one FOI refusal, ATSB senior officer Colin McNamara said to release the information could damage international ties; while in another, ATSB chief commissioner Greg Hood invoked laws under which bureau officials can be jailed for two years if they provide information to the media.
Danica Weeks, whose husband Paul died on MH370, said she found “the ATSB silence” to be “frustrating and distressing”.
“How can the ATSB continue to use their draconian laws to refuse FOI requests and why does Greg Hood continue to shield the ATSB by using them?” she said this week. “We continue to suffer and those in power, those with the information, continue to keep us in this jailed hell.”
When The Australian published analysis from a team led by senior Canadian air crash investigator Larry Vance concluding that the aircraft had been ditched by a pilot, the ATSB hired law firm Minter Ellison to write to the editors in a threatening tone asking that they “refrain” from publishing that style of article.
The ATSB banned the leader of the search conducted by Dutch underwater survey firm Fugro, Paul Kennedy, from speaking, and ATSB spokesman Paul Sadler would not say why.
Mr Sadler has repeatedly refused to answer questions, including this week when he did not respond to an inquiry as to whether the ATSB still believed in its “ghost flight/death dive” theory or now accepted the aircraft was flown to the end by a pilot.
Businessman and former Civil Aviation Safety Authority chairman Dick Smith has said such ATSB actions were “outrageous”, and called on Transport Minister Michael McCormack to demand that Mr Hood run the bureau in a manner consistent with a democracy that believed in freedom of speech and freedom of the press.”
@David: Yes, I recall the article, but I was referring to Bailey’s statements about the ATSB and “IPG” simulation studies. What were the IPG simulation studies? What exactly is he trying to prove? That a long glide was possible with pilot inputs? We know that is possible. Is there some other new revelation?
@Victor
I’ve equally no clue what Bailey was trying to prove in his article (all of 321 words!). His “This did not happen.” I’ve no clue what that even refers to – the spiral dive and/or “Tens of thousands of small bits of flotsam would have floated for months.”? And then briefly rambled on for another paragraph or two without actually providing any evidence to discount whatever it was he was struggling to discount.
While his tabloidesque populist-appealing articles should not go unnoticed, his articles should be called to account as they have been before, here and elsewhere. Not withstanding his public rebuke from the ATSB itself; I rather find his input like getting stuck in a barroom with the local bore professing an opinion and knowledge of anything and everything to anyone who will listen to him, just as long as there is a full glass in front of him.
@Victor/Mick
Wow! Tough crowd. I found the Bailey article to be largely OK, and simply pointing out that the spiral dive at 600 knots was not supported by the observables.
@Mick Rooney
RE: “I rather find his input like getting stuck in a barroom with the local bore professing an opinion and knowledge of anything and everything to anyone who will listen to him, just as long as there is a full glass in front of him.”
A very apt comparison. As you said, his opinions have been challenged on a number of occasions, but he steadfastly refuses to debate the issues. There’s a lot more I’d like to say, but it might get me in trouble!
@Victor. Like @DennisW I thought his intent was clear. He has continued with his long maintained theme that there was a piloted ditch and here he now aims to “prove” it, with the support of the Independent Group of pilots, whoever they be.
Part of that is to disprove, with the others, the “death dive”, now using a simulator in support of such as debris size.
Clearly he will have had trouble recruiting @Andrew; thankfully.
He is not off to a great start with this article. The APU will auto-start and generate 115V AC at all altitudes, not waiting to get down to 22,000 ft. In fact what happens on descent through 22,000 ft is that it will start its pneumatic delivery, that capability being at ‘Idle’ higher up. Yet he does not seem to notice such observations.
Still, I for one will want to hear him and his group out. Amongst other things it will be of interest to hear how they account for the final descent transmissions in a 230 kt IAS 1700 fpm descent slowing to 120, flaps down. Not by ignoring them I hope.
Tens of thousands of small metal bits could easily have remained at the surface for a while, and many for many months. Not inconsistent with the beach combing success of a single individual over the next several years. More than half of the known or presumed MH370 fragments, and just about all of the smallest and those less obviously fragments of an airplane were recovered via the efforts of BG — an undoubtedly incomplete survey of a few 10s of km of coastline in the EIO. If you account for the entirety of the eastern IO coastline, for losses at sea and burial on land, and for pieces lost in the central gyre, the number of initially natant fragments has to be in the thousands, perhaps much more. The smaller the fragments, the more rapidly the cells will be penetrated and the pieces sink..
Or so it seems to me…
@David: I guess we’ll have to wait to see the video.
@lkr: The smaller pieces, if they survived the trip across the ocean, would also be less likely to be recovered and reported.
I’d say the success of the Blaine Gibson’s search efforts in finding debris is evidence that there were a large number of fragments generated by the crash.
Boeing tested the B777 wing to destruction.
It passed the 150 percent ultimate limit load test point.
They kept going, until it eventually failed.
Does anyone know at what location (span-wise station or rib number) failure occurred ?
@ventus45
I believe the stress test is on YouTube so visually we can see.
@ventus45
”Wing failure occurred at 154.4% from our initial readings. Failure occurred in both wings, so again analyzing data afterwards we determined that they failed 20 milliseconds apart; right wing going first. Additional analysis after that showed that the right wing failed beginning in the area of rib 25, and the left wing also failed at rib 25 and also at rib 21 on the upper surface of the wing. This was as they expected. They had high-speed video exactly in that location and were able to capture those failures as they progressed.”
Boeing 777 Major Static Test Video Audio Transcript
Rib 25 is about half-way between the wing root and wing tip.
@Andrew, @ventus45
Rib 25 is mid point between the two main outboard flap attachment/extension mechanisms.
The load test was undertaken with a wing bare of any trailing edge control surfaces.
@TBill @Andrew @Don Thompson
Have been away from home for a couple of days.
Thanks for the test failure information.
The reason I asked was because of the Pemba Flap inner support, specifically, the failure of the heavy steel rod, in what appears to me to be a “twist” around the longitudinal axis.
The inboard flap support mounting for the outboard flap appears to be attached to rib 21 at the front, and to the main wing box rear spar, at the rear, just inboard of rib 22.
If the wing failed in a wind up spiral dive at 3.75G+, (at high speed) in the rib 21 to 25 region, what would happen to the outer wing section ?
What would it’s motion be, relative to the remaining inner wing section ?
Would it bend upwards (due to air loads) or might it actually bend downwards and/or rotate downwards (due to wing twist / washout at very high speeds).
Either way, the outboard flap had to fail at some point, since it only has two mounts, the inboard mount still attached to the inner wing section, and the outboard mount still attached to the outboard, now broken off wing section.
What does the twisted end of that hefty rod on the remaining inboard mount tell us about “it’s” failure conditions, and what (if anything) does that tell us (by inference ?) about the failure of the flap itself.
Did it break into two, or (perhaps) three places ?
We know it broke into at least two pieces, since we have the inner one third piece with the mounting attached, found at Pemba. The failure is immediately outboard of the mount.
But, might it also have broken just inboard of the outboard mount as well ?
If it did, then the large, long, relatively slender flap section between the mounts (roughly half of it) is floating in the ocean, or beached somewhere, and should be “findable”.
Either way, what does the twist in that rod tell us about the span-wise forces on the inner section of flap at failure, and what might that imply re it impinging on the outboard end face of the flaperon ?
French authorities concluding that a flaperon had been lowered
Is this true? That the French authorities in possession of the flaperon have concluded that the flaperon had been lowered?
@all
Chilean Airforce C-130 enroute from Punta Arenas to Antarctica lost contact, presumed crash with 38 onboard.
Weather was good, no distress signal.
There is a nice graphic showing the timeline from when plane disappeared, with arcs corresponding to engine flameouts(?) of 3 engines, then 4 engines, then total fuel exhaustion.
Everybody is learning from MH370.
https://www.fach.mil.cl/noticias/2019/diciembre/09_comunicado2/09_comunicado2.html
@WarrenPlatts
The reports compiled by the French DGA/TA did not make an emphatic conclusion. Rather the report stated:
“In the absence of data from Boeing, and despite the deterioration of some fracture surfaces, a hypothesis was nevertheless formulated: taking into account the results of the examinations, it appears that the flaperon impacted the water while still attached to the aeroplane and that at the time of the impact it was deflected. A fall simulation for the flaperon with an initial speed corresponding to that of an aeroplane in flight could definitively exclude the loss of the latter in flight.
The little data supplied by Boeing did not enable the examination to be progressed by making calculations that would have made it possible to confirm or reject the proposed hypothesis.”
The DGA/TA report is published as an appendix to the July 2018 Safety Investigation Report (as a separate PDF file).
My view is that the DGA/TA analysis does not give the failure of the two attachment structures sufficient consideration.
@CanisMagnus
Interesting and condolences to the families.
Here I thought 2019 might go by without a “mystery” or pijack. Almost one a year, but too soon on this one.
@TBill.. I wonder if Ocean Infinity may have to be ‘pulled’ away from other tasks to find the black box of this C-130. The conditions are very similar to where MH370 may have crashed in the SIO.
On July 1, 2019, a fire broke out on the ‘Losharik’, a Russian deep-diving nuclear powered submersible, as it was about to dock with its ‘mother’ submarine. The fire killed 14 military personnel, all with officer ranks, and some of whom were previously awarded Russia’s highest military decorations. Although, the ‘Losharik’ worked with the Russian Navy, the crew actually worked for a specialized unit known as GUGI, which was part of Russian military intelligence GRU. Among its special tasks were installing/dismantling listening and noise making devices on the ocean floor, and retrieving sensitive military debris, such as satellite/missile/aircraft parts.
Many media reports have written that fire is a common hazard in submarines, and its occurrence here was tragic but not unusual. However, some very knowledgeable military writers have pointed out that the true nature of what happened may never be known because of the secretive nature of this submarine’s mission, and that the ‘fire’ may actually be an acceptable excuse proffered by the Kremlin to the media.
But that begs the question: why disclose the event at all, and why with so much detail available in so many Kremlin-friendly or (somewhat) neutral Russian media?
Some have speculated that an intentional media operation with strategic leaks has been conducted, designed to deceive the public.
Here are some of the anomalies that observers have noticed:
-the tragedy happened as the Losharik was about to dock with the mother submarine, but in shallow waters off the Russian coast near Norway, hence not being deployed for deep diving tasks that it was uniquely suited for. Five days previously, the mother ship had docked at Severomorsk port, and it is now assumed that the Losharik was already underneath it at that time.
-the first hint of this tragedy was leaked to a local news website with reports of casualties, then almost immediately removed from the site
-the Norwegian nuclear authority was ‘informed’ by the Russians of an ‘explosion’ on board the submersible, but the Russians then denied having informed the Norwegians (and the Norwegians never actually reported an explosion being recorded)
-some local fishermen were conveniently on location, and witnessed first hand as the mother submarine suddenly emerged out of the water and saw men running around the deck
-two tugs arrived on the scene almost immediately and helped with the rescue
-apparently a civilian was ‘evacuated’ prior to event, raising questions about his presence, leading to media speculation that the submersible was ‘testing’ out new equipment
-the fire apparently broke out in the battery section of submarine, and the bodies of the men were later found with all the fire fighting equipment and emergency breathing apparatus completely empty
-the entire submersible was finally flooded to douse the fire, thus no chance of anybody remaining alive, yet it’s not explained why this could not have been done without evacuating the men first. The men had been ordered to stay behind to ‘save’ the vessel.
-At a meeting between the president and defence minister, he requested that the submersible be repaired as soon as possible, and returned to service immediately. This allows for it to quickly return to service without too many questions asked about the true extent of the damage.
-during investigations, a test was done to the batteries by heating them up, leading to their explosion, but it’s not clear if that was the cause of the fire. Some have speculated that the batteries could have been sabotaged, but why, and by whom is not known.
-during the funeral for the men, media was not allowed to film the event, but based on the few images that have emerged, a distinct lack of emotion is noticeable among the ‘mourners’.
-the men were posthumously awarded medals and their families are to be well looked after
Here are some additional points to consider:
-2020 would have been the 20th anniversary of the sinking of the Kursk, considered a traumatic low point for the president. Now, that anniversary has to compete with the 1st anniversary of the ‘heroic’ Losharik incident which would arrive a few weeks before the Kursk anniversary.
-the Losharik incident happened a few days after the anticipated release in Russia of the Hollywood movie ‘The Command’ which retells the Kursk incident
-according an Ukrainian news Twitter feed, Russian military counter-intelligence had conducted an investigation into the personnel at the GUGI recently
-the same Twitter feed had a picture taken in May 2014 of the youngest Losharik officer posing in casual civilian clothes with the premier (former president)
Ars Technica website had coverage of the Losharik incident and the comments were partisan toward Russia, leading some to speculate that Russian trolls were active. One comment which drew the ire of the readers was the following:
Russia had absolutely no good reasons for telling us about this. The fact that so many senior people were on board and the fact they said anything tells me something. This was intentional, they killed those men. Talking about it afterward is a warning to others who know who they are. These men were untouchable. We (Russia) set fire to their submarine and recovered the actual sub. Stay in line.
What could they have possibly done that got them killed by the state which actually desperately needs men with the special set of skills that they possessed? And are they truly dead or simply gone into some kind of witness protection program?
An aid to the head of the Russian Navy, Sergei Pavlov, stated at the funeral for the sailors lost in the accident, “With their lives, they saved the lives of their colleagues, saved the vessel and prevented a planetary catastrophe.” Pavlov reportedly did not elaborate.
https://www.popularmechanics.com/military/navy-ships/a28340271/submarine-nuclear-reactor-accident/
Many have pointed out that nuclear accidents on board submarines, although rare, are not in the category of ‘planetary catastrophe’.
How did these men prevent a planetary catastrophe? And what could they possibly have done that got them killed by the state which actually desperately needs people with the special set of skills they possessed? And are they truly dead or simply gone into some kind of witness protection program?
My theory
I’ve observed Ghyslain Wattrelos for a while now, and read his book. In his book he mentions having visited a French nuclear submarine as part of his efforts to understand what happened to his family on board MH370. And in his media interviews, his face usually displays the despondency and sadness of the bereaved. But in the TV interview he gave after the visit of the French judges to Boeing, his face had considerably brightened. He admitted that he may never know what happened to his family, yet he seemed to be much more cheerful. Something had changed his demeanor. I put this down to his feeling some kind of vindication and justice done.
If Jeff Wise is right, then Russian (IFSO’s?) working for the GRU were responsible for hijacking MH370 and downing it somewhere in the SIO, for both strategic and tactical purposes. The GRU would also be responsible for retrieving the aircraft debris as well as the blackboxes, and the GUGI unit in the Losharik would have been tasked with this job. If men in the GUGI can’t keep secrets, then they’d have to be made to disappear. Their ‘death’ would also satisfy the need for justice, and pave the way for Russia to return to the international community.
Many in the Soviet secret services were very unhappy when Yeltsin handed over the blackboxes of the B747 shot down in 1983 to the Koreans in 1997 as a gesture of goodwill.
The current president of Russia in his first year in office in 2000, awarded the highest Russian medal to the air force officer who ordered the shootdown of KAL007 in 1983. 2 months after MH370 disappeared, that same retired Air Force general died under ‘unexplained’ circumstances.
@TB, CMR — A bit premature I think, especially invoking MH370 and OI. Unless there are political indicators [Chile is a mess right now], I expect the Chilean military won’t want to invest 10s of millions to find the black box unless they have a very concise search area. That unlikely unless there are more radar and satellite assets than one would imagine. Loss of radio contact over water is still going to happen, and this plane didn’t do a MH370, going black, then backtracking… They should be looking at maintenance logs, especially if this happens to be an old aircraft.
@CMR, TBill, lkr
It’s unlikely that Chile’s C-130s were equipped with voice or data recorders.
It’d be interesting to know which FACh a/c serial number was lost: 995, 996, 998, 990, 992, or 999. The latter three are the AAR tanker variant.
The lost FACh C-130 is #990, a C-130R. Ex USMC, stored at AMARC between 2009 & 2014 before its refurb & sale to Chile.
H/T to the team C-130.net
@CMR
I am curious if Ghyslain Wattrelos’ book is available in english?
Also Florence deChangy’s book same question.
@Richard, Victor, Bobby. I appreciate that this is a major undertaking that you do in your own time – but can you give us a hint when the paper will issue? A month ago you gave us another teaser: “The work undertaken by Bobby, Richard, and me is nearing completion. Without a doubt, it will be the most comprehensive and precise path reconstruction effort to date, and includes many factors others have chosen to ignore.”
@Paul Smithson: I apologize if the last statement seemed like a teaser, as it was meant to provide a status update. What was true a month ago remains true today. The work is nearing completion, and documentation of the results remains.
There was desire to accurately reconstruct a viable path between 18:28 and 19:41, and this work took much longer than planned. We now have a candidate path that satisfies all the technical criteria, and can be justified based on hypothetical objectives.
We’ve made no secret that our proposed path is on a trajectory due south of BEDAX, crossing the 7th arc near 34.3S latitude. We’ve discovered nothing that would alter that conclusion.
[Latitude typo now corrected.]
@victor. Thanks for that. Not a complaint – I’m genuinely wondering when we might get a chance to read it. I’m clear what your conclusion is regarding path. What I am eager to see is the empirical demonstration that the statistics demonstrate this to be the singular solution.
34.3 latitude?
@paul smithson
Correct! 34.3°S
@Paul
We already have a singular solution – the 7th arc +/- C. What we do not have is a unique solution.
David,
Having had a week or two where I could only take time to briefly read, not consider nor absorb, certainly not construct,
And now that the three (BRV) have re-confirmed (via R and V’s recent comments) that they consider there to be only one path south meeting the available evidence,
We should return to Stage 5 of the flight, where Stage 5 is defined as starting at the moment of first main engine fuel extinction.
But first I wish to refer to your Comment #26079 of December 5th, 6:56 pm. Here you acknowledge that fuel flow to underwing engines has a small gravity assist. I would like to state an opinion that main engine fuel flow should remain satisfactory to sustain level flight at altitude, even without operation of the fuel tank electrically driven boost pumps.
Without calculation, points contributing to this opinion include:
i. The system should be designed with capacity to handle Sea Level Take-Off fuel flow requirements;
ii. Required fuel flow to maintain level flight at altitude will be considerably lower than Sea Level Take-Off fuel flow requirements, and as a result the line pressure losses will be considerably less than at the design point;
iii. This next can be confirmed by yourself or others, but presumably the fuel tank pressure is maintained a little above ambient static pressure during flight;
iv. The above mentioned small gravity assist will contribute to maintaining suitable fuel inlet pressure at the inlet to the Engine Low Pressure Pump element;
v. Should there ever be a disturbance, for whatever reason, to the fuel arriving at the inlet to the engine LP pump, then the pump will be rotating at a relatively high speed within its operating range and will produce a pressure rise to satisfactorily supply the engine high pressure pump and the engine fuel metering system whenever there remains fuel within the LP pump.
Or in other words, the summation of the ambient static pressure at altitude and the presumed slight fuel tank pressurisation and the small gravity assist should be sufficient to overcome line pressure losses (and whatever small pressure loss is necessary to operate the suction line check valve) and provide adequate inlet conditions for/to the engine fuel system.
And the reason for the above stated opinion is that we have evidence that there were at least three re-configurations of the aircraft electrical system during the last flight of 9M-MRO. The first of these was when contact was lost. Another was when there was a aircraft Satcom Log-on at 1825 UTC and the other was at the last Log-on at 2419 UTC. There has been speculation concerning the nature and extent of these electrical re-configurations. The reason for the stated opinion is simply to opine that the aircraft could (and clearly did) continue on in satisfactory powered flight until fuel extinction or some deliberate contrary action.
_______________________
Returning to Stage 5:
David, you have continued to ask for some probable means and reason for the last log-on other than that it was due to APU Auto-Start and subsequent Log-on. I will offer one possibility, to ensure it is included in the list of such, even though it may NOT have any real contribution as to whether or not the aircraft descended, or continue to descend, at a high rate and thus (relatively) close to the aircraft position at last Log-on, or whether it was guided to a more distant impact point with the ocean.
For the record, I think your last request for such was your Comment #25991 of November 24th, 8:34 pm.
In that comment, amongst other discussions you included: “Recently I have touted the possibility of a piloted manoeuvre that broke the satellite link, as raised by Holland” …,
One of your main concerns, as it has been one of mine, whether or not fuel supply to the APU in the rear of the aircraft could be maintained for long enough for the APU to start and then for the Satcom to log-on.
Referring to Holland, 1702.02432 Ian D Holland – 07Feb2017.pdf (per my file storage), and weeding out his estimates for northern bound paths, thus only including southern bound paths. I calculated AVERAGE descent accelerations of approximately 0.7 g DOWNWARDS. This was over a time period of 8 seconds
Hence there remains only 0.3 g upon the fuel for the ambient air pressure, plus any tank pressurisation, to overcome whilst the APU inlet fuel line is emptying (into the APU fuel pump) after the fuel tank APU feed pump inlet is no longer is covered in fuel. Line losses do exist, it is acknowledged.
If this type of downward acceleration continued for long enough to continue any ongoing electrical activity then APU operation may have been sustained for sufficiently a long enough time for the log-on.
My APU scenario, should it be noted, would be that the APU actually started prior to the transition from level or near level flight to the rapidly “falling from the sky” increasing rate descent. That it, too, ran out of fuel before the expected (from my memory) IFE Log-on, would be understandable. I leave it to others as to why this IFE Log-on was expected.
My calculations were interrupted and I have not proceeded further. Also I have read somewhere “here” that Holland issued a revised report in 2018, but I have not gone hunting.
_______________________
But, WHAT IF:
Let’s consider that there remained an element of some humanity within the cockpit, possibly in a slumber or otherwise comatose.
At the extinction of the first main engine due to fuel exhaustion, it is presumed that there would have been an audible warning.
Let’s consider that the now partially or wholly active human element made another electrical re-configuration.
Perhaps this re-configuration begat the last Satcom Log-on ?
Second engine fails due to Fuel exhaustion.
_______________________
@David
@George G
I do not have too much to add, but B777 pilot Andrew Banks advised me on Twitter:
“…The B777 FCOM, like other Boeing FCOMs (eg B747, B787), states that thrust deterioration or flameout might occur in the event of suction feed at high altitude. The B777 QRH indicates that the risk of flameout is low provided the altitude is 38,000 ft or below.”
Captio’s idea of deploying RAT at IGARI via power=OFF is still of interest to me. If we argue possible goal was feign accident, maybe I am cutting all main power, not sure.
On a completely different matter.
For @DennisW
Not often that an EMS helicopter has to make an ILS approach to YSSY RW34R in broad daylight !
This occured Tuesday 10th Dec 2019 due to the choking smoke we have been suffering for a couple of weeks now due to our bushfires around Sydney.
After the chopper had landed, it was ground taxi, and the tower still could not see it.
The hospital helo pad refered to in the video is about 1 mile to the NE.
The view of YSSY tower at General Holmes Drive expressway tunnel (which goes under RW 34L/16R was stock footage, not on the day.
Tower said visibility was 1,500 metres at best.
I live about 3 miles WNW from this spot, and Canterbury Hospital is about 400 metres due north of me.
I could not see it.
https://vimeo.com/378946759
@Ventus
The flight medics/pilots are our primary line of defense in the very rural area where I live. My hat is off to them for sure. 2.5 hours to a hospital by ground versus 40 minutes by helicopter has made a huge difference several times.
Yours truly below after just loading a patient.
https://photos.app.goo.gl/cUua8e7ZPfst343b8
@George G.
I can add little more to the risk of air entrainment causing a double flame out at IGARI. Yes there will be some fuel pressure at the engine due to gravity and air pressurisation in the tank from its vent will add to that. Yet the outcome according to FCOM is as I paraphrased, at high altitude there is a risk of flameout.
As I responded to @TBill later, I do not think a pilot versed with the FCOM would chance that since recovery could take some time and altitude; aside from the distraction.
Likewise as to whether there could be a fuel flow reduction, which to me might introduce other control issues particularly if sporadic, the FCOM warns of that too. I imagine the risk level depends on the level of air entrained at refuelling, the elapsed time at cruising altitude and conditions.
At IGARI it may be that the warning no longer applies but that would be hard to establish in retrospect or, by a pilot in prospect, assuming the turn back was planned.
On your point v. if the low pressure pump tries to draw more from the suction feed than it can deliver, vapour lock is likely to result, leading at least to a sporadic supply to the nozzles and the thrust deterioration that FCOM warns about.
You raise the 0.3g effect on fuel supply to the APU. There are various contributors and I have been into this in obviously what has been read-deterring length and complexity. That entailed drawing up descent examples (at different entry speeds and pitch rates) that are consistent with the Holland’s interpretation of the final transmissions. The examples are at: https://www.dropbox.com/s/anlsxuxi0c0w3rb/some%20final%20descent%20models.xlsx?dl=0
A summary of whether vapour lock would occur, supposing these examples to be representative, is at:
https://www.dropbox.com/s/u516p2xstshd9om/vapour%20lock%20analysis%20results%20and%20outcome.xlsx?dl=0
The Holland 2018 paper is at:
https://arxiv.org/pdf/1702.02432v2.pdf
About your, “That it, too, ran out of fuel before the expected (from my memory) IFE Log-on, would be understandable. I leave it to others as to why this IFE Log-on was expected.”
The 30 lbs of residual estimated by Boeing would have been sufficient to power the APU through to IFE log-on if all had been available to the APU and the aircraft had not crashed and the transmissions may not have been received.
@TBill. “The B777 QRH indicates that the risk of flameout is low provided the altitude is 38,000 ft or below.”
It puzzles me why FCOM would not be more specific in that case. Also puzzling is how they would come to pick 38,000 ft in particular when aeration at refuelling and time in the air obviously vary.
@David
@TBill
RE: “It puzzles me why FCOM would not be more specific in that case.”
The section in the B777 FCOM regarding suction feed is generic. The B747 and B787 FCOMs (and possibly others) have exactly the same paragraphs, word for word.
The B777 FUEL PRESS ENG L, R NNC caters for a loss of pressure (ie suction feed) on one side. If the aircraft is above 38,000 ft, the crew must open either crossfeed and descend to 38,000 ft or lower, after which the crossfeed should be closed. The 38,000 ft maximum altitude presumably caters for the worst case.
@Andrew, @TBill, @David:
Based on the recent exchange, I would say that based on fuel flow considerations, it’s possible that after IGARI, the AC busses (left and right, main and transfer) were disabled and only RAT power was available. However, I would also conclude that this would greatly increase the risk and workload on the pilot, as there was a possibility of fuel flow disruption due to cavitation, and the autopilot would not be available.
I see no evidence that the autopilot was ever disengaged after IGARI. The conclusions reached by the Malaysian officials were based on attempts in a simulator to precisely matching the time and location of targets from the military radar. However, based on comparisons with the ADS-B data before the transponder was disabled, we know that the military radar data was either inaccurate or intermittent in this time period. On the other hand, the civilian radar data (the SSR data before IGARI and the PSR data near Kota Bharu) can be matched with the autopilot engaged.
@Victor, @David, @GeorgeG
Just a little more, Andreas on Twitter feels risk is low:
“…Still, even high risk can mean flame out only likely in 1% of the cases. Low risk in aviation is more in the one to a million range.”
But one would think if maneuvers at IGARI were wild and altitude was very high, then fuel flow might be issue on RAT only. Over on Reddit, @pigdead has recently posted an animation he made of his interpretation of the IGARI turn, and it is quite wild (below). But we just don’t know how the IGARI-turn back was managed, except we think minimum FL380 at KB.
https://streamable.com/o1kqb
@TBill: That animation is fantasy. It is somewhat based on the groundspeed data as provided in the DSTG report, and that groundspeed data is in turn based on inaccurate, intermittent military data.
David,
Thank you for the Holland 2018 paper.
He has revised several aspects but he has continued to bundle up both the North and the South Tracks in his final Descent Rate Bounds tables. This is clear for Tables IV (Hypothesis 1) and VI (Hypothesis 2) but no distinction is made in his final Table VII.
He does give a warning that when interpreting Table VII, the different conditions under which a tabled bound was derived need to be considered.
And earlier in his report he discusses the BFO evidence indicating a track southwards.
Thanks, also, for your retransmission of your “some final descent models”. I previously had to just store this without any serious analysis. However, perhaps you may wish to recheck them for your use of averages from Ian Holland’s report.
Returning to vapour-lock, and your vapour lock analysis. When pumping liquids, the inlet pressure of a fluid entering the vanes of a pump impeller should have little if any effect on “angle of attack”. Only if the pressure reduces to close to vapour pressure should there be any effect; and that is, of course, what you are investigating in your analysis.
Please don’t think I reckon that all that 30 lbs of residual fuel estimated by Boeing got burnt within the APU whilst the aircraft was descending. It would seem unlikely that a stable fuel supply to the APU would be maintained once the descent began to oscillate.
If I ever had the complete satcom log, I don’t have it know and I have a question.
Is there anything different in detail between the complete sequence of messages for the call attempts at 18:40 and 23:14?
@Andrew, TBill, Victor. I see the NNC does indeed override the FCOM thank you, though the prospects of him having chosen to do that do remain doubtful.
@George G. That was quick.
I agree that restricting the course to south, which is reasonable, would alter the Holland averages though using averages is to be indicative only and literally there could be a range of tables for each example, extending across the Holland range and indeed including varying SDU outage times, also of his Table vii warning.
The effort versus likely consequence to the search deters me, since there are also other assumptions and approximations. However, I think the case remains that vapour lock is quite possible.
I agree also that it is pressure reduction that will induce that and impeller blade angle of attack (the impeller is driven mechanically so on load is essentially is at constant speed) will be affected just by flow rate.
@David
RE: ”I see the NNC does indeed override the FCOM thank you, though the prospects of him having chosen to do that do remain doubtful.”
I’m not sure what you mean by “that”. I think the likelihood of the pilot de-powering all AC buses at IGARI is extremely low, irrespective of fuel pressure considerations.
@Andrew. Yes. By ‘that’ I meant chop all generated AC.
Forgot the RAT. Should have read…all engine and APU generated AC..
All,
IF,
It can be determined that there is sufficient evidence to “pin-point” the location along Arc 7 where the last Aircraft Logon to the satellite was made; and
It becomes agreed that this last transmission was made during a high speed descent;
Then,
May the remaining problem may be summarised as:
Whether or not the aircraft descended, or continue to descend, at a high rate and thus (relatively) close to the aircraft position at last Log-on, or whether it was guided to a more distant impact point with the ocean.
?
Should a list be begun here of every little tidbit of information or evidence towards one or the other of these two alternatives. ?
BRV, particularly Victor, your blog, your thoughts ?
@George G: We’ve debated for some time whether or not there was a glide after the last message at 00:19. Most of us believe there is not enough evidence to decide whether there was an impact close to the 7th arc, or whether there was a dive-glide-dive sequence, although some people strongly favor one scenario over the other.
@Andrew. I guess to fly “headings” the autopilot must still be engaged and functioning. I am wondering whether there is some degraded status for autopilot where only headings (rather than LNAV/VNAV/waypoint routing) would be available?
@Victor. “I see no evidence that the autopilot was ever disengaged after IGARI. …. the civilian radar data (the SSR data before IGARI and the PSR data near Kota Bharu) can be matched with the autopilot engaged.” I agree that a good approximation to the PSR route approaching and existing Kota Bharu can be obtained with a series of inferred straight segments. However, a number of course changes are required over a relatively short period. I can’t see how that track would be explained by a route (why would you have several minor course changes in quick succession?). Moreover, because there is so much noise in the calculated azimuth from the PSR data, I feel it is difficult to conclude definitively whether this was handflown or AP. I think this latter question might be settled by examining the PSR data from a routine flight past the same radar, which I believe has been obtainable. If the azimuth noise is comparable, then we can accept the AP hypothesis (but still need to explain the turns). If it is substantially less, then the handflown explanation would gain credence.
@Paul Smithson: You seem to equate autopilot engaged with flying an LNAV route. Rather, I think it is likely the turn at IGARI was performed in HDG or TRK SEL mode. The pilot progressively selected a reciprocal heading (to ensure the turn proceeded to the left), and then either aimed towards a waypoint near Kota Bharu (such as KADAX) or flew direct to the waypoint in LNAV mode.
As for the waviness, we see it in the data derived from the Kota Bharu head but not the Butterworth head. For a number of reasons, I believe it is noise in the radar data at Kota Bharu, and not indicative of hand flying.
@Victor. The point I am making is that I don’t think we can be conclusive that the segment of flight captured by KB PSR was on AP. If he was flying toward a planned destination, that would normally be achieved by use of a waypoint. The fact that the course demonstrates at least 3 course changes either indicates he was flying a route with multiple waypoints over a relatively short period (which, why?) or was flying short segments on constant heading/track with incremental adjustments (why, if he had a destination in mind?).
I would welcome the opportunity to compare another PSR track from the same radar to compare how steady the azimuth is.
@victor. So I guess what I’m saying is that if it was AP we need to explain why there are multiple course changes. And secondly, that a comparison of azimuth noise MH370 vs another trace from the same PSR would give us an indication of who straight the “approximately straight” bits actually were.
@Paul Smithson: There are not multiple course changes. For the inbound segment, the track is fairly constant until about 10 NM from KADAX. There’s then a small turn towards KADAX, followed by a “direct to” KADAX about 5 NM from KADAX. After passing KADAX (in the cone of silence), the outbound data falls on a leg from KADAX to OMGAK. To my eye, it fits perfectly with a flight on autopilot.
Relative to the waviness, we don’t have PSR tracks from the Kota Bharu radar head to compare. We do have some SSR tracks, and a waviness can be observed even for paths that appear straight using the matching ADS-B data.
Malaysian FAA rating downgraded. Earlier November article was for subscribers. This seems not to be.
https://aviationweek.com/commercial-aviation/malaysia-faces-lengthy-process-regain-faa-rating?utm_rid=CPEN1000000945612&utm_campaign=22590&utm_medium=email&elq2=2fc0134244be4f98ac9fc08c6d633370
Having revisited my review of the Kota Bharu PSR data, I have to concede that Victor is right. Theres no compelling evidence of more than one significant course change in that dataset. Incoming trace is approx 230 over ground. Outbound is approx 239. The turn from 230 to 239 seems to have commenced around 100s before the before KB cone of silence.
However, I am also of the view that there is evidence of another turn between the turnback and the start of the KB trace. And at least one further turn during the peninsular crossing before reaching the west coast and the start of the Penang turn.
@Victor
@PaulS
I can go either way on it, but there is an apparent discrepancy in that Safety Information Report details two points in the turn, and it is an extremely sharp turn. They then use the data to conduct an apprently serious series of simulator studies and conclude it is manual flying for that turn. I know we can dismiss the radar accuracy but seems funny that they would study the turn so seriosuly if they did not believe the data quality was any good. Captio seems to be buying into the SIR rport.
I (cheat) but make a relatively sharp turn on sim autopilot by setting 25% bank and then do a zoom climb to slow down and make sharp exit from the turn, but as sharp as that is, it don’t think it squeezes down to the narrow radius that the SIR report suggests. I use custom waypoints made up from the KB radar to force the turn.
@TBill: The turn can be accomplished on autopilot if the left bank begins before the first waypoint, the speed is reduced to MMS, and the bank angle selector knob is set to 25°. Why the Malaysians did not try that, I don’t know, but there are MANY questions about how the Malaysians conducted the investigation.
@Victor
So our perp perhaps likes to fiddle with the % bank limit knob — 25% for IGARI then 15% for Penang– not your ordinary hijacker.
@TBill: I think the slow, steep, automated turn at IGARI is a lot easier to explain than the shallow turn south of Penang Island, although both can easily be accomplished with simple inputs. I lean towards the pilot’s keeping things as simple as possible, and here the autopilot helps tremendously.
As I have previously demonstrated, the turnback itself can be modeled very effectively with a straightforward 180 turn, starting from the IGARI-BITOD leg. In other words, it did not carry straight ahead from mid point if IGARI turn as the military trace would have us believe and means the aircaft position would have been a little south of the SIR’s “waypoint 1”, permiting a slightly larger turn diameter.
This model predicts that a 180 turn was started at 17:22:00, at 465kt and bank angle 25 degrees. Maintaining the same speed gets you back to the start of the Kota Bharu radar trace 17:30:33 exactly on time.
It can also be readily demonstrated that the military radar would not have been capable of distinguishing fine variations in track angle at the range in question, so attaching a high level of accuracy to the azimuth of WPT1 or WPT2 is not prudent (though the ranges ought to be good).
The “trombone” model paper is here
https://docs.google.com/document/d/12D7BKDD7vOmFizjhtz-n8DFEA7jDCg35Dg7d8n5-ti8/edit?usp=sharing
@Paul Smithson: I agree with your principle elements, that is, to begin the turn after IGARI after the wings are level and before the first military radar waypoint, and to turn to a reciprocal heading with a bank of 25°.
@Victor
Not to belabor but here is recent MH370 article from the Mirror.
https://www.mirror.co.uk/news/world-news/flight-mh370-mystery-never-solved-21083168
and they talk about manual flying, and the inference (though not directly stated as such) is Boeing may feel that.
PS- If the inference is wrong we should probably say so because we take heavy incoming from the naysayers anytime something is wrong, even if it is inconsequential to the narrative
@Victor. Thanks. To elaborate a little further…The idea of the trombone model is to see what speed, bank angle and turn commencement timing is required to get back to 173033 position on time, with a turn of the correct diameter and in the right place.
It is possible to have a smaller diameter turn at higher speed and AOB, but if you do that you either get back to 173033 too early, or the position of the turn has to be shifted further out to the ENE (with later start). So what I sought to demonstrate is that if you want to simultaneously satisfy the positioning of the turn, the approximate diameter of the turn and the arrival time at 173033, then you end up with the solution I have explained.
The solution space was constrained by assumption of constant speed from turn start up to 173033, and that the aircrat completed turn onto IGARI-BITOD leg before commencing the turnback. It turns out that the speed solution derived by this method also matches aircraft speed when it was first picked up by Kota Bharu PSR. Inclusion of wind vector doesn’t materially affect the solution (time/position of start of turnback) but does drop the required TAS by a few knots.
@TBill: We discussed this above based on an article from a better source than The Mirror. It was Malaysia that determined the inputs to the test (speed, waypoints, times, position to begin turn). Boeing would be foolish to dispute Malaysia’s findings, as it supports its contention that it has no liability.
@Paul Smithson: Again, I might quibble about how you included the effect of wind, and when the turn began, and how these affect the calculated speed, but I basically agree with your analysis and your conclusion that a turn with the autopilot engaged can match the radar data.
Also, we don’t have the 10-second military radar data that was supplied to the DSTG, but based on the graphical representations that we do have, the military data does not match the ADS-B data before IGARI. I trust the ADS-B data. I think the military data suffers from inaccuracy and intermittency, and the quality of the data deteriorated even more after IGARI.
“the military data does not match the ADS-B data before IGARI. I trust the ADS-B data” – agreed.
@paul smithson, @Victor,
I agree the ADS-B data is more accurate than radar data or ACARS data, but we only have ADS-B data up until the diversion.
Here is a link to a comparison of the ADS-B data with the ACARS and radar data prior to diversion:
https://www.dropbox.com/s/ux7j5llaczm1fgx/ACARS%20ADS-B%20KLIA-TAR%20GentingRSR%20KB-TAR.pdf?dl=0
In my view, the turn back toward Malaysia was under Autopilot LNAV mode at ca. 17° and not under HDG/TRK SEL with the bank limit selector either in Auto bank limit or a Manual setting of bank limit at 25°. An Auto bank limit setting of 25° would not work under an Air Speed of 332 KTAS in any case.
Please see the attached links for the turn back and bank angle limitation:
https://www.dropbox.com/s/s58jw0qxgmr23ad/MH370%20Turn%20Back%20over%20Malaysia.pdf?dl=0
https://www.dropbox.com/s/zttir14f9zpv9ck/Bank%20Angle%20Limit%20-%20HDG-TRK%20SEL.pdf?dl=0
CORRECTION:
An Auto bank limit setting of 25° would not work above an Air Speed of 332 KTAS in any case.
@Richard: Two points:
1) I said in a previous comment that if the mode was HDG SEL at the IGARI turn, the bank angle selector knob would be set to 25°, not AUTO.
2) If the turn was in LNAV mode, then waypoints would need to be selected. Which waypoints do you think were entered that would produce that turn?
@Richard.
1. Thanks for sharing the info on auto-bank angle constraints. This further strengthens evidence for a turn with AOB set at 25, as VI suggests.
2. Thanks also for the comparisons of radar vs ADSB & ACARS.
3. Your turnback hypothesis illustrates a turn diameter of 21.6NM. Although you haven’t overlaid the graphical representation of the military radar, I can’t see how it is remotely compatible with the military trace (or WPT2 described by the SIR). Your turn exit would be about 8NM to the NW of WPT2.
4. Using the speed estimation methods to extract good groundspeed estimates from the KB PSR data (that I thought we had consensus on), I also get ground speed over the first 1+ minute of the KB PSR records of around 460kts, not 495kts.
For reasons above, I still think that my hypothesis (level turn onto reciprocal heading or track, AOB 25, started at 1722, with mean groundspeed of around 465 +/-8kts throughout) provides a good fit to the data we have.
If initial course over ground after turnback completion was 239 (reciprocal of 059 IGARI-BITOD) or 237 (per FI), then that course must have been held for ~5 minutes after turn exit before turning another 7 (or 9) degrees left to get you on to the KB inbound track on 230. A hook is evident in the military trace roughly where you would expect/predict this course correction to occur, about 30s before the start of the KB track.
Out of interest, is the “Bank Limit” label (beyond the 25 mark) a selectable option on that AOB selector knob? Or is is 25 the maximum that can be manually selected?
@Paul Smithson: It’s the maximum selectable position stop on the AOB knob.
@Victor, Andrew. Another descent possibility is that after the left engine failed and the APU auto-start commenced there was residual TAC and right flaperon deflection (compared to the left, that floating above neutral were there no hydraulics, both PCUs (actuators) in by-pass) that caused a tightening left spiral. Once the APU came on line the flaperon deflection differential ceased. Possibly TAC reduced also. I speculate that the spiral then was largely halted but the descent rate was such that the aircraft pitched up and broke up.
There could have been some spoiler changes too on the APU coming on line.
See the attached for a spiral dive description: the second para on p4 in particular:
http://www.skywalker.ca/Flying_Stories/Bob_s_Stories/SpiralDive.PDF
Were the final transmissions at high altitude, a descent thereafter in a spiral dive followed by straightening, the dive then could be truncated by break-up. The heavy wreckage would of course be close to the 7th arc but could be well scattered, not like AF447.
A right wing break is my preferred flaperon and part right flap separation theory.
I note that the Boeing simulations could not allow for APU auto-start. You attempted to simulate what would happen before that in your April 2017 post below, a part spiral resulting but supposing APU-absent asymmetry would continue. I note in that the aircraft exceeded Mach 1.
https://mh370.radiantphysics.com/2017/06/04/mh370-end-of-flight-with-banked-descent-and-no-pilot/
This possibility above is very much a sketch outline of a hypothetical for discussion.
There is some uncertainty as to whether the windmilling engines would provide continuing hydraulic power pending APU start. You assumed not though since my memory has it that later this was assessed as likely. The ATSB did not respond specifically to that in some questions I raised some time ago.
Then there is the issue as to whether during windmilling a right engine PMG would power the right PSA and in doing so could alter flight control positions.
Finally there is the time between engine failure and the RAT coming on-line, 10 seconds for left engine rundown, 15 to react, 2 to deploy, that then powering a right flaperon PCU.
While these aspects would have been encompassed in the Boeing simulations (and some at least were in yours), those too were without the APU auto-start interface, restoring any missing hydraulic and electrical power to the left and right systems about 1:10 after left engine failure.
For any preliminary comments please as to whether I am barking up the wrong tree.
@David: I long ago reached the conclusion that there are so many unknowns about how the many systems of a Boeing 777 interact after fuel exhaustion that it is impossible to rule out impact very close the 7th arc. It is also impossible to rule out the dive-glide-dive scenario. Therefore, we have to consider both cases. The main question seems to be what probability to assign to each case, which would in turn determine how to devise the most effective search strategy.
@Victor. “….The main question seems to be what probability to assign to each case, which would in turn determine how to devise the most effective search strategy.”
I assume the search would start at before the second arc then extend in the route direction beyond it.
A difference a high altitude break-up brings is the potential wreckage scattering and any effect that would have on the possibility it would have been missed, not being a field of the assumed size, density and reflectivity.
@David
RE: “I speculate that the spiral then was largely halted but the descent rate was such that the aircraft pitched up and broke up.”
If a spiral did develop, it would take a lot of opposite direction roll control to level the wings. I doubt that simply centring the controls would be anywhere near enough. As it says in the reference you cited: “The only way out is to get the wings level, and this will take lots of opposite aileron deflection, and rudder will help too.”
@Andrew. OK. Thanks. I think therefore therefore that there is no logic leading to a mid air breakup, that is unless the Boeing simulator cycles that led to the highest descent rates could cause that.
@Victor
Reading some old 2016 JW posts, a couple points interested me:
1. RetiredF4 speculated the IGARI turn could be a “break turn”, the purpose would be deceive the primary radar operator, if looking at the screen, to think he/she was observing a hardware glitch on the radar screen vs.something an aircraft would do. That maneuver would require manual flight mode he was thinking.
2. Unrelated to above, the 34.5 South area of Arc7 was cited as an area where the French satellite had spotted possible debris.
3. Also some discussion if the fishermen offshore KB might have actually seen a low flying MH370? At the time you said we have to leave in on the table. Now that we have the raw civil radar data, I am thinking it is hard to get to FL400 from there. Still on the table?
@TBill: Contrary to what many people believe, I don’t think the pilot flew the B777 with fighter plane maneuvers. Nor do I believe the plane was flown at low altitudes near Kota Bharu.
Can you please provide the reference to French satellite images of debris near 34.5S latitude?
@Victor
On July 18 on JW below see @Erik Nelson’s comment about 34.5 starting point on Arc7. I believe Erik has 3 or 4 posts in this thread where he discusses this with some links, with reference also to Duncan Steel posts.
http://jeffwise.net/2016/07/15/how-we-know-where-mh370-went/comment-page-4/#comments
It’s an interesting thread especially where ZS brother allegedly appears and spars with RetiredF4 and @DennisW. In the thread, it is never established if it was really ZS brother or a ZS-sympathizer/imposter. Of less interest, that might be my very first post in there.
@TBill: Can you please provide a link to reports that French satellites imaged debris near 94.5S latitude? I’m not asking for links to comments.
@Victor
Well Erik gave a lot of links in there, some of which I reviewed briefly. I will have to go back and search for key links.
If you are suggesting there is no substantiation, I apologize in advance.
@Paul Smithson
Thank you for showing so much of the details and methodology of your analysis. My comments include thoughts are based on the discussion of your post:
Immediately after IGARI, the radar track has, as I understand it, a behavior typical of overflying the waypoint and making an azimuth change under AP control to the next pre-entered waypoint. You have made a persuasive case for a turn at 25 deg bank angle immediately thereafter. (More later). After exiting the turn, on a first essentially reciprocal azimuth, the pilot then enable a new waypoint sequence which became the route to Penang.
The turn back is “manual” in the sense that it is not based on a predetermined next waypoint, but a pilot input to the dashboard. The reciprocal path was approximately entered on the dashboard as was the maximum bank angle. The turn was “manually” initiated but “automatically” performed. It was not “hand flown.” I believe that this is the basis for the confusion in the popular press as to the nature of the turn back. So, the turn back could have been performed with no preparation until after IGARI.
The miss-match between the turn exit azimuth and the continuation track suggests that the first azimuth was close to the newly entered waypoint and someone might propose a hypothetical AP track to capture the route.
@Victor
We agree on this. Right now we have not been able to identify a clear differentiator between a dive and a glide. That this is so means that a large probable search area was bypassed when searching the original hot spot region (and I do not exclude the region that you currently favor).
The reason that it happened is our reticence in the early days of this effort to acknowledge that there could have been a pilot at the controls at the end. The official position was that this was a zombie flight, and we had no objective evidence to the contrary. However, the assumption of a zombie flight was a political decision.
Question: If the IFE on the plane was disabled a) would the there be a log on attempt when the system re-logs-on after a reboot?; b)would the phones call be affected by this?
Sid Bennett said: Immediately after IGARI, the radar track has, as I understand it, a behavior typical of overflying the waypoint and making an azimuth change under AP control to the next pre-entered waypoint.
IGARI is a “flyby” waypoint. As such, the turn to BITOD preceded IGARI, as shown in this post.
I believe that this [manual inputs to the autopilot] is the basis for the confusion in the popular press as to the nature of the turn back.
The maximum bank angle in HDG SEL mode is 25°, and the path simulated in by the Malaysian investigators required a bank greater than 30°. For this reason, the Malaysians concluded the turn was hand-flown, and this was reported in the press. However, as we’ve been discussing above, the inaccurate and intermittent nature of the military radar data calls into question these conclusions, which I discussed in the aforementioned post.
The reason that it [a large probable search area was bypassed when searching the original hot spot region] happened is our reticence in the early days of this effort to acknowledge that there could have been a pilot at the controls at the end.
There were political reasons, but there was also a need to keep the search area to a manageable size. The ATSB search was originally 60 sq km, and then increased to 120 sq km, which was a large area to search with ships that used a towfish to scan.
However, the assumption of a zombie flight was a political decision.
There is a common misconception that the DSTG analysis assumed there were no pilot inputs. In fact, the study did allow for maneuvers (changes in direction, altitude, and speed), which were probabilistically described. That said, the posterior PDFs favored straight paths, which is why 38S latitude was the hot spot.
If the IFE on the plane was disabled a) would the there be a log on attempt when the system re-logs-on after a reboot?; b)would the phones call be affected by this?
If the IFE switch in the cockpit was turned off, functionality would be lost at the passenger seats, but an IFE log-on would still occur. Satellite calls to and from the cockpit (which do not rely on the IFE) would still occur.
@Andrew.
I am a little perplexed, re your “and rudder will help too.”.
I would have thought, that the procedural steps to be taken in recovering from an existing and/or intensifying high speed winding up spiral dive, in order, would be :-
(1) control any further speed increase – by increasing drag by any and all available means, ie, power to idle, and dump the gear (regardless of placarded limits – after all – if you don’t – you will be dead in a matter of seconds anyway),
(2) control and prevent further “G” increase – by consciously and deliberately (but very carefully) applying nose down stick input, and if possible, “unload” ie, reduce “G”, loading (to near “zero G” if possible),
(3) ONLY THEN – gently roll to nearest horizon,
(4) consciously and deliberately restrain and control – the now “way out of longitudinal trim” aircraft’s natural tendency to “pitch up” on it’s own, (in it’s attempt to return to trim speed) by firmly holding forward pressure – to limit recovery “G build up” to a reasonable figure, say two, to three G, maximum.
All that assumes plenty of altitude to do it of course, take your time, don’t panic, and don’t “rush it” either.
The point about “rolling” that seems to me to be a critical and often greatly under stated consideration, is that the “roll authority” of either conventional ailerons and/or flight spoilers diminishes greatly at “high G’s”. If you want to roll, you have to “unload” as much as possible first.
I can not see how any use of rudder would be productive in this situation, other than being used very gently, for controlling any adverse yaw, that may be produced by the use of ailerons and/or flight spoilers.
Is that what you meant ?
@Ventus45
Those weren’t my words, it was a quote from the link that @David provided. I suspect they meant coordinated use of rudder to offset the adverse aileron yaw. A boot full of rudder would not be advisable, particularly in a large aircraft!
@Andrew
Thank you.
@VictorI
I am a little rusty in my Boy Scout map reading knowledge, but when I finally found the key for the filled triangle, it is a mandatory reporting point, not a waypoint. I understand that these points are on the map and can be and are used also as waypoints where a turn may be programmed. But it is not clear that the fly over or fly by attribute is predetermined except by the way it is entered in the FMS.
@Sid Bennett: I’ve only seen fly-over waypoints in arrival or departure procedures. In fact, in a B777, I don’t believe it’s even possible to manually enter a fly-over waypoint using the CDU. Also, somebody associated with the Malaysian DCA has confirmed that IGARI was a “compulsory fly-by waypoint”.
@Victor
@Sid Bennett
RE: ”I’ve only seen fly-over waypoints in arrival or departure procedures. In fact, in a B777, I don’t believe it’s even possible to manually enter a fly-over waypoint using the CDU.”
In the Boeing world, fly-over waypoints only exist as part of coded procedures in the FMC nav database; they cannot be manually entered. Waypoints that define an airway are fly-by waypoints (eg IGARI). Boeing FMCs do not allow pilots to change a fly-by waypoint to a fly-over waypoint.
@Victor. You asked TBill, “Can you please provide the reference to French satellite images of debris near 34.5S latitude?”
In case this was it, CSIRO’s, “The search for MH370 and
ocean surface drift”, report EP174155 of 26th June, 2017 at 2.1 says of Pleiades imagery, “Minchin et al. (2017) found the greatest number (9) of
probably man-made objects in image PHR4 near 34.5°S, 91.3°E….”
Mind, that imagery was of 23rd March.
@David
To flange it up, I did give Victor the links I had which seemed to old inactive links, for the most part.
But it seems like way back in March – April 2014 that Duncan Steel and others may have felt the French sat imagery Debris possibly originated from approx 34.5 South on Arc7. It’s a possible point in favor of 34.5 South region.
@Victor
You asked “Which waypoints do you think were entered that would produce that turn?”
Waypoint KADAX.
@Richard: If direct to KADAX was entered at a position after passing IGARI, the target path would be a great circle (nearly a straight line) between that position and KADAX. A great circle with those endpoints has a track of about 243°, which means that the plane would as quickly as possible (as limited by bank angle and speed) complete the turn and intercept a track of around 243° in the inbound leg towards KADAX. In fact, at the start of the civil radar data, the track is closer to about 231°, and another turn is required to pass over KADAX.
I don’t see how it’s possible to replicate the path flown in LNAV unless multiple waypoints were entered. On the other hand, the shape of the path looks very similar to a simple turn using HDG (or TRK) SEL.
@Andrew
Thanks for clearing up the waypoint question, since I certainly do not how to change it to flyover (and I tried).
If flyover option were allowed then Richards prior proposal of turning due South at AGEGA could be made to work. What kind of waypoint is AGEGA anyways? Flyby or flyover?
Clarificaton: One early proposal was to go all the way to AGEGA and then turn South, so the radius of the turn would go out to about 93.75E (beyond) AGEGA.
@TBill
AGEGA is a fly-by waypoint. Fly-over waypoints are associated with some instrument approach and departure procedures at some airports.
@TBill, @Victor, @David,
There are 2 sets of french satellite imagery, both taken on 23rd March 2014.
(1) There are 4 satellite images that were presented in Beijing to the NOK in 2014, along with satellite images from other nations.
https://www.dropbox.com/s/dsg2lh2h4iqyepj/Beijing%20Satellite%20Debris%20Images.jpg?dl=0
Here is a link to a close up of the locations. No images were presented at that time to my knowledge.
https://www.dropbox.com/s/whm182fbfevu73b/French%20Satellite%20Images%20Locations%2023032014.jpg?dl=0
The first location on the list is at -34.57417 91.86889. This is 96.1 nm west of our MH370 location on the 7th Arc of -34.3506 93.7875. In 15 days the average drift speed of MH370 floating debris of 0.267 knots is perfectly feasible.
(2) There are also 4 satellite images from the french Airbus Pleiades 1A satellite presented in a report by Geoscience Australia in 2017 showing 70 objects of which 12 are designated man made.
https://www.dropbox.com/s/by1rc7cyrdg596s/mh370_satellite-imagery-geoscienceaust-report.pdf?dl=0
The central point of the 12 man made objects is -34.560150 91.116691. This is 37.3 nm further west of (1) and 133.1 nm west of our MH370 location on the 7th Arc of -34.3506 93.7875. In 15 days the average drift speed of 0.370 knots is also perfectly feasible for MH370 floating debris.
Below is a link to an analysis of all 4 Pleiades 1A satellite images, that I prepared back in 2017. The most important is image 4 (the PLEIADES PHR_4 image), where the majority of the man made objects are found in a cluster. The analysis includes the CSIRO low and high windage drift between 8th March 2014 and 23rd March 2014 from 35°S on the 7th Arc.
https://www.dropbox.com/s/6o2zudb47d5q9m6/Geoscience%20Australia%20Images%20vs%20CSIRO%20Drift%20Analysis.pdf?dl=0
There is an excellent fit to our MH370 end point from both (1) and (2).
What I find interesting is that the french authorities already shared a first set of satellite image locations in 2014 with the Malaysians and then a second set from a slightly different locations with the Australians in 2017.
It begs the following questions:
(a) What images are available for the 2014 locations?
(b) What satellite took the first set of images on the same day as the second set of images, but at another slightly different location?
(c) Why wait 3 years to share the images from the second set?
(d) Are there any more french satellite images available?
At the time we questioned the average size of the man made objects at 43 m2 (ca. 6.5 m x 6.5 m).
@Victor
Do you think the initial turn was executed with HDG/TRK SEL and then subsequently waypoints KADAX, ENDOR, OPOVI and VAMPI were entered?
The radar path appears to pass directly over KADAX, ENDOR and OPOVI.
@Richard: I think the HDG/TRK SEL mode was used to manage the turn after IGARI, and then waypoints were followed either in LNAV mode or by “aiming” for waypoints using the ND in HDG/SEL mode.
@Victor
@Paul
If I’m not mistaken, I think that with AOB selected to 25, the bank angle is still restricted at high TAS. 25degs will be the max limit not the target. So, there is no difference from selecting Auto.
Happy to be corrected!
@richard.
“It begs the following questions:
(a) What images are available for the 2014 locations?
(b) What satellite took the first set of images on the same day as the second set of images, but at another slightly different location?
(c) Why wait 3 years to share the images from the second set?
(d) Are there any more french satellite images available?”
Available imagery (optical and SAR) with metadata for the Airbus group is browsable here https://www.intelligence-airbusds.com/en/4871-geostore-ordering though you may need to set up a free account to view the catlogue. I had a quick look around the location -34.5 91.2 but available imagery seems to all be south of there.
The kmz is here https://drive.google.com/open?id=1cvAI2kOslliaTG3EdwbYnHP1jF_gvz4t
The sub-1M resolution Pleiades images mentioned in the Geoscience Australia report aren’t listed in the catalogue perhaps not available commercially.
@Richard. “then subsequently waypoints KADAX, ENDOR, OPOVI and VAMPI were entered?” Would you not need another turn somewhere in the middle of the peninsular between KADAX and ENDOR to account for the “bow” shape in the track?
If he was flying waypoints, what is the explanation for choosing such a routing rather than flying directly towards wherever he was purposely going?
After ENDOR, for the turn south of Penang, you go right, right a bit more, then left. Again, why fly a complex turn if your intent is to proceed up N571?
..another turn somewhere in the middle of the peninsular
I believe OMGAK fits the track perfectly and this has been noted by others. But again, the question is why? If it isn’t a published airway, why insert additional turns?
@Paul Smithson: I can’t explain exactly why the path was chosen, but it appears the plane was navigating by waypoints when crossing the Malaysian peninsula. The radar data outbound of Kota Bharu seems to follow the path KADAX to OMGAK, passed OMGAK remaining on that track, and then turned towards ENDOR about 40 NM from that waypoint. Interestingly, the ND will only display waypoints when the range of the display is set to 40 NM or less, so it could be that ENDOR became the target once it was displayed on the ND.
MH6163, which was a cargo plane that landed at Penang, followed the waypoints VKB-OMGAK-TARIP-PUKAR, landing on runway 22.
@Tim
RE: “If I’m not mistaken, I think that with AOB selected to 25, the bank angle is still restricted at high TAS. 25degs will be the max limit not the target. So, there is no difference from selecting Auto.”
Not true. The FCOM states:
BANK LIMIT Selector (outer)…sets the AFDS commanded bank limit when in the heading select (HDG SEL) or track select (TRK SEL) roll mode as follows:
• AUTO – varies between 15 – 25 degrees, depending on TAS
• 5, 10, 15, 20 or 25 – the selected value is the maximum, regardless of airspeed.
@Victor
Correct me if wrong, but the other unsual thing about the IGARI turn points in the SIR report, is how very fast it got around the sharp bend.
@Victor. I share your view that he may have been “‘aiming’ for waypoints using the ND in HDG/SEL mode”. When I said previously that I believe the plane wasn’t “flying waypoints” I used that as a shorthand to mean an LNAV route comprising waypoints (a) because there is an unecessary number of waypoints – why not fly direct (b) they don’t match airways (c) turns don’t always match waypoints.
I was interested to learn that the ND doesn’t display waypoints unless range is set at 40 or less, though max range can be set at 80/160/320. Can you or Andrew confirm that definitively? From this reference
http://mediawiki.ivao.aero/index.php?title=Navigation_Display_-_ND
it says “When using the waypoints display function with a high range, it may overload the SGU (Symbol Generator Unit) giving an error message” and may display empty diamonds rather than wpt information. Perhaps WPTs could be seen at ranges >40NM but without their labels?
Its maybe of interest that the same reference says that VOR/VOR-DME and airports are displayed at higher ranges if the appropriate buttons have been selected on the control panel.
So if the plane was being navigated in this manner, the “point-to” features could potentially have been >>40NM range VOR/VOR-DME (bearing +/- distance indicated on ND) or even airports.
I often wonder about Pulau Perak in the same light. If not an aeronautical waypoint, did he fly over it purely by coincidence on the way to VAMPI? Is there some way he could have seen it on the ND whether by a rolling map [is that a display option?], terrain radar, radio beacon or even by its lights? As far as I’m aware, there’s no VOR and I’m doubtful – but don’t know – that such a small light target would be clearly visible >60NM out.
@TBill. I believe that the “sharp bend” is an artefact created by connecting two segments. Before the turnback, the target was followed by the radar because it had nearly constant bearing (or because it was coasted at course last detected by SSR?). Mid-way through the turnback, the radar picks it up again because the target is now at nearly constant range. Joining up those two discontinuous segments gives you the right angle.
Why the corner of that right-angle was plotted is anyone’s guess. Why did the malaysians gave the australians 10s position periodicity when the actual position plots would have been 4s? Is that “depiction” even a faithful representation of position plots by the military radar?
As VI has already said, the ADS-B record proves that the military trace did not faithfully represent the turn at IGARI. Moreover, on basis of primary returns alone, the Western Hill radar demonstrably could not have been capable of promptly detecting course changes at near max range given its azimuth resolution capability. With maximum azimuth accuracy of 0.3 degree and >200NM out you have lateral discrimination of only 1NM. In practice probably a good deal poorer. Range, on the other hand, should be pretty good.
Once the aircraft has completed its turnback, it is once again on near constant azimuth with respect to the radar. So you would expect the target to be re-established.
This is why I feel that we should not trust the “details” of the depiction of the turnback, but that we should be able to trust (a) the range of the mid-point of the turn – because range discrimination is very accurate (b) the continuous section of trace after turn completion when the target seems to have been properly re-established.
@Paul Smithson: When I said waypoints are not displayed if the range is set to greater than 40 NM, I was not referring to airports or navigational aids. In particular, I was referring to waypoint KADAX, which would not be displayed unless either 1) the range is less than 40 NM AND the WPT option is selected, OR 2) KADAX is a waypoint in the route, OR 3) KADAX is selected as a fix.
@Paul Smithson wrote “Why did the malaysians gave the australians 10s position periodicity when the actual position plots would have been 4s?”
The Western Hill RAT-31DL antenna rotates at 6rpm, so 10sec plot intervals. The civil radars rotate at 15rpm, so 4sec plot intervals.
However, I agree with your suggestion that “that the “sharp bend” is an artefact created by connecting two segments” as a consequence of the cessation of tracking by the RAT-31DL’s SSR function, a period of ‘coasting’, and then reacquisition of target by the PSR function as the likely sequence of events that explain the artefact.
Concerning navigation: the 2nd Penang Bridge, the Palau Rimau lighthouse, and the Palau Perak lighthouse may have provided dominant visible landmarks. Admiralty data for the Palau Perak light states an 18NM visible range from its 128m vantage height. My opinion for the course towards VAMPI, overflying Palau Perak, is that it was established by activating LNAV guidance with VAMPI as the next immediate waypoint.
@Victor. Thanks for that clarification. Do you know if the ND on 777 would display waypoints at ranges >40NM (assuming WPT filter selected), albeit without labels (which the other point I was getting at above).
@Don. Aha. So the 6rpm does indeed match the periodicity of the data plots provided to Australians. Thats useful, thanks.
From the speed profile of the Butterworth PSR, it looks as if speed was reduced pretty much as soon as the western coast was crossed, or perhaps the bridge. As if it was the distinctive visible landmarks that prompted the change. This is another fragment that fits with the limited instrumentation flying scenario.
Re PP maritime navigation light – I guess published range determined by its elevation as well as/rather than the power of the light. But even from the air I’d be suprised if it would be visible >50NM or 60NM out.
I hear you on the appearance of N571 intercept and LNAV thereafter per Victor’s previous article. I think that’s compatible with the scanty data we have post 1755 or so.
But if he was navigating by HDG/TRK and point-and-shoot at targets on the Nav Display, why on earth would someone with a plan elect to navigate in such a rudimentary and inefficient manner over a full 30 mins post diversion??
@Victor
I agree with your conclusion that the initial turn back was in HDG/TRK SEL mode.
Subsequently the waypoints KADAX, OMGAK, ENDOR, OPOVI and VAMPI were used, as shown in the flight route linked in my comment 3 days ago:
https://www.dropbox.com/s/4zqoyuvsbfxvyw2/MH370%20Flight%20Path%20Kota%20Bharu%20to%20Penang.pdf?dl=0
To illustrate that the turn at IGARI could have been flown in autopilot, I ran a test case using the PMDG777 model. I used realistic temperature and wind from the Kota Bharu radiosonde data, and maintained constant altitude at FL350 and constant speed at M0.81. After flying by IGARI and establishing the track towards BITOD, I managed a turn on autopilot using TRK SEL mode at a bank of 25°. I was able to fly within 1.7 NM of the entry waypoint and within 1.2 NM of the exit waypoint, while arriving at the first civilian radar point within seconds of the acquired target. The path is shown in this figure.
In short, the conclusion that the turn at IGARI had to be hand-flown is not supported by the military radar data when the proper inaccuracy is assigned.
@Paul Smithson: No, I don’t think the symbols for the waypoints would be displayed if the MAP mode of the ND was set to a range greater than 40 NM.
@Paul Smithson
You ask “If he was flying waypoints, what is the explanation for choosing such a routing rather than flying directly towards wherever he was purposely going?”
I can give you 3 possible reasons:
(1) The segment between KADAX, OMGAK and TARIP follows the FIR boundary between Kuala Lumpur FIR and Bangkok FIR. This follows a strategy already seen at the turn back, which started on the FIR boundary between Kuala Lumpur FIR (delegated from Singapore FIR) and the Ho Chi Minh FIR. The same strategy was adopted again near waypoint IGOGU for the FMT at the FIR boundary between the Kuala Lumpur FIR and the Chennai FIR. Following a FIR boundary has the advantage of neither ATC knowing who should take responsibility and not appearing as a threat to either countries airspace.
(2) Victor has already pointed out that this was a standard route used by other aircraft, so would not unusually alarm a radar operator.
(3) Simon Hardy has already pointed out that the long sweep past Penang may have been a final farewell by the Captain to his birth place.
@Paul Smithson
Further to the data from the 2 sets of french satellite images shared with the Malaysian in 2014 and the Australians in 2017, here is a GE plot of all the locations. The first set of locations are marked F1-1 to F1-4. The second set of locations of the 12 man made objects identified from the four satellite images are marked F2-n-m, where n = the image number and m = the object number within the relevant image.
I have superimposed the CSIRO drift data up until 25th March 2014 from 34S on the 7th Arc, which you will see aligns very well with the main cluster of floating debris from the french satellite imagery.
https://www.dropbox.com/s/ckeaumkxm45x9u8/French%20Satellite%20Images%20High%20Windage%2025MAR2014.png?dl=0
@Victor. Thanks for that simulation. It looks pretty close to what I had proposed. Out of interest: when does that turn start (in “MH370 time”). Why does your turnback look like it is >180 degrees (the turn itself, not the slight kink left after turn completion)? How many seconds early have you arrived back at 173033 position?
… and the swing by Pulau Perak was to be the final contact with Malaysia.
I have always suspected that the method of flying the aircraft as proposed by Victor, was in essence to:-
(a) avoid setting up waypoints in the FMC, and thereby leaving a recoverable trace of a ‘plan’.
(b) allow for a rapid change of intentions should the pilot become aware that military assets were being deployed.
@Paul Smithson: Yes, our paths are very similar, which they should be considering we both assume a constant TAS and altitude to generate our paths.
After established on a track to BITOD, I start the turn 30.4 NM from BITOD, which I chose in order to arrive at the start of KB PSR data at the correct time. The turn is towards a track angle of 231°M, although I slightly fiddled with the track (+/- 1°) to line up better with the KB PSR data. We can’t really know precisely how the path was flown. My motivation was to demonstrate that even the simplest of paths (constant Mach, constant altitude) can match the “entry and exit” waypoints while remaining in autopilot.
On the subject of the IGARI turn back, we have no radar data between 17:21 and 17:30. The path, speed, BA and altitude during that period can not be derived from the end points of that period alone. However, we know the path, speed, BA and altitude leading up to the point at which radar data is lost, and we have path, speed, and inferred BA (~0 deg) between 17:30 and 17:45 (KB flyby). We also know the altitude at 17:38 (~40,000 feet or FL378), 2200 feet higher than when the turn back started.
While most of the discussion last spring about the KB PSR data was focused on determining the altitude at KB, the speed profile between 17:30 and 17:38 is also important. Initially, the speed profile for that period looked pretty noisy. However, Paul noticed that the noise was primarily the result of noisy az data, not noisy range data. Since the Az cannot change significantly second by second, Paul suggested filtering the Az values using a polynomial model for the incoming and outgoing Az values. That turned out to significantly improve the speed profile clarity. See chart here: http://bit.ly/2MaDYcG
From the filtered values, it is clear that the speed increased ~75 kts between 17:30 and 17:38 from a low of 457 kts to 532 kts at KB. Moreover, the increase was not a steady acceleration. The speed increased in 3 distinct steps (reveled by the Az filter) from 457 to 475 to 500 to 532 kts, with a brief steady speed at each step up.
I believe this speed profile is highly indicative of manual flight between 17:21 and at least 17:38 or later. Moreover, it virtually proves there was a climbing turn at IGARI, slowing to ~450 kts, probably reaching an altitude of ~43,000 feet before starting to descend and rebuild speed, in steps, looking for the best speed/altitude to “escape” notice.
While other scenarios might be possible, they need to be consistent with the 17:30-17:38 speed steeps and 40,000 ft KB altitude. But I have not heard any yet.
@airlandseaman said: I believe this speed profile is highly indicative of manual flight between 17:21 and at least 17:38 or later.
Or the pilot simply changed the MCP speed with autopilot and autothrottle engaged.
Moreover, it virtually proves there was a climbing turn at IGARI…
I disagree that the turning climb is “virtually” proven. The climb could have occurred once on course towards Kota Bharu.
Victor: Speeding up 75 kts while climbing 2200 feet at that altitude makes no sense at all. The pattern is most consistent with a climbing turn followed by a descent and speed up. That is much more likely. I would like to hear from other pilots on this.
@PaulS
“though max range can be set at 80/160/320. Can you or Andrew confirm that definitively? From this reference”
I think it’s 640 max and your reference photo shows that (320 for AirBus and 640 for B777)
@Victor
Nice simulation.
@airsealandman
I think that the TAS would be more interesting. Since it is a 180deg turn, can you estimate how much of the speed change is due to the winds?
@TBill. It wasn’t the max range that I wanted to confirm, but whether waypoints would display with range set >40NM, even if their labels didn’t show up.
@PaulS
On a cursory look, Victor is correct that waypoints disappear beyond 40. But I am not clear if the waypoints are part of the LNAV route if then you could see them farther away.
Sid: The direction of flight between 17:30 and 17:38 was substantially a constant direction. The wind between 43000 and 40000 was not significantly different. So the speed changes were due to actions by the PF, not wind.
@ALSM. I understand that you like the idea of a climbing turn to tighten the turnback radius and to account for higher altitude that we have inferred from the Kota Bharu PSR.
I have already explained why I don’t think the depiction of the turn should be taken at face value, and why I think it can be explained by a level 180 turn (albeith at somewhat lower speed than in Victor’s simulation).
The other difficulty I have with your scenario is this:
1. If the turn took place between roughly 17:22:00 and 17:24:30, how come the “slow speed/top of climb” has been sustained six minutes later?
2. Have you checked whether the kinetic energy/potential energy trade-off (reducing TAS from ~480 to ~445) is sufficient to gain 6000 feet in altitude (from @FL350 to FL410) can actually generate? I haven’t, but I doubt it.
Like Victor, I favour the interpretation that the climb happened approaching Kota Bharu. Moreover, I ran some calculations to test a hypothesis. That the power was piled on at ~17:31:30 and used for a combination of acceleration and climb (the flat steps in the speed profile you have just posted being steeper climbs).
I used the slope of the first acceleration and aircraft weight to work out how much kinetic energy per minute we are adding. Now suppose that this energy addition continues at same rate. Work out how much energy has been absorbed by the subsequent accelerations. Any residual that hasn’t been used for acceleration, is assumed to have been converted into potential energy and we can work out the implied height gained.
The results are here:
https://drive.google.com/file/d/0B–BSmBHc7Y9YTNyZi1WaEtnVW44R1M5MElKN3p0R0U4WnlJ/view?usp=sharing
They predict a climb from 36,600ft height (equivalent FL350)to 39500ft. That tallies surprosingly nicely with the altitude required at Kota Bharu.
Obviously assumption of extra thrust = constant power addition => constant rate of acceleration for given mass is a simplification because of extra drag as speed increases and lower thrust as altitude increases. But nonetheless, it does seem to put us in the right ballpark.
I’m not claiming this as gospel – simply pointing out why I favour this hypothesis.
@Tbill. Select ND range 40NM, press the WPT filter button. Change ND range to 80NM. Waypoints no longer displayed?
@paul smithson
Yes. From the FCOM, the WPT switch “displays waypoints, if the ND range selector is in the 10, 20 or 40 NM range.”
Thanks @Andrew.
Do you have a view on how far out you could see distinctive features like Pulau Perak on a clear night?
Paul: I did try to estimate the climb from basic conservation of energy principals. Here is an old paper on the subject. http://bit.ly/2VbM7zo
@Mike I am not talking about conservation of energy 1730 to 1738. I am referring to trading speed for climb during the turn. How much do you need to slow down to get from 37000 geo height to 43000? From what to what speed?
Paul: Without changing the thrust, the altitude gain would be 2500-3000 feet depending on the speed at the top. If the PF did what most believe he did, and increased the thrust to the max available, a 6000 ft climb is reasonable.
@paul smithson
I don’t know about Pulau Perak in particular, but in clear conditions it is possible to see landmarks from quite a long distance (100 nm) at night, especially if there is moonlight and the feature is lit. Even if he couldn’t see it clearly, ZS would have been very familiar with other landmarks in the area (eg Penang Island, Langkawi, Malaysian coastline), and could probably have navigated visually. Mind you, that doesn’t mean he did so!
@airlandseaman said: Speeding up 75 kts while climbing 2200 feet at that altitude makes no sense at all
To properly consider this requires properly considering the available time, distance, and thrust. From the time MH370 essentially rolled out of the turn to the time it entered the cone-of-silence (CoS) over Kota Bharu is about 86 NM. In that time, the plane had to climb about 2500 ft from FL350 to FL385 and accelerate from about 460 kn to 530 kn.
Let’s say half that distance was spent climbing and then the last half was spent accelerating. That amounts to a rate of climb of only 624 fpm over those 43 NM. Considering that 9M-MRO at a weight of about 215 MT could climb at 300 fpm at the maximum altitude of FL406 and at LRC speed, that climb rate of 624 fpm from FL350 to FL385 is easily achieved, even if the entire 43 NM is not used for the climb.
Then we have to accelerate from 460 kn to 530 kn over the remaining distance of 43 NM, which represents a time interval of about 5.58 min. The average acceleration over that interval would be about 0.011g. Now, let’s suppose the average (L/D) over that acceleration is about 16, since the (L/D) will go down as the speed approaches Mmo = 0.87. The total thrust-to-weight from the engines therefore needs to be about 0.011 + 1/16 = 0.074.
Do we have sufficient thrust from the engines to balance the drag and acceleration? The average maximum (dual-engine) thrust at FL385 will be about 16.1 MT, for a (T/W) ratio of about 0.075, which means even this crude analysis shows there should be enough thrust to accelerate to from 460 kn to 530 kn before the CoS is reached.
So in short, I do believe there is enough thrust capability to complete the climb and acceleration in the time and distance between the roll out of the turn and the entry in to the CoS.
I would like to hear from other pilots on this.
Of course! Preferably from those with airliner experience.
@airlandseaman: To properly do this analysis, you have to consider drag and thrust separately, as total energy is not conserved because thrust does not equal drag.
@andrew, thanks for that.
@Mike, I’m no sure I agree that your version is “what most people believe he did”. You will note that our energy calcs are a mirror image. you are trading stored PE for speed gain + descent and find a descent of 3100ft gives you speed gain 460 to 530. I found constant power addition over same period gave you +70 speed and +2900 alt. In YOUR case that initial stored PE at has to come from somewhere pre 1730. In my case it comes from max power starting 173130 at FL350
Would speed
@andrew, thanks for that.
@Mike, I’m no sure I agree that your version is “what most people believe he did”. You will note that our energy calcs are a mirror image. you are trading stored PE for speed gain + descent and find a descent of 3100ft gives you speed gain 460 to 530. I found constant power addition over same period gave you +70 speed and +2900 alt. In YOUR case that initial stored PE at has to come from somewhere pre 1730. In my case it comes from max power starting 173130 at FL350
Pls excuse typos – on phone
@Andrew
no moon that night by the way, setting about 00:41AM (take off) at KLIA.
Sort of confusing error in Langwiesche recent paper, first sentence:
“at 12:42 a.m. on the quiet, *moonlit* night of March 8, 2014, a Boeing 777-200ER operated by Malaysia Airlines took off from Kuala Lumpur and turned toward Beijing, climbing to its assigned cruising altitude of 35,000 feet.”
As Hermione Gingold might have pointed out, there was none that flight.
@TBill
Ah, yes, I remember it well!
Victor:
You can’t dismiss out of hand the basic conservation of energy argument I am putting forward to explain the speed steps, simply because I used an approximate solution based on the assumptions put forward in the paper. Certainly, to first order, my calculations are not unreasonable. Not exact, but close enough to make the point that this is a viable scenario.
When I first discussed this possibility with you privately, you said you would try to repeat my estimate using a more accurate total energy model that takes into account the changes in thrust and drag. I was hoping you would do that, but I have not seen any results. If you could, it would help us all better understand the extent to which my approximate calculations are changed by a higher fidelity model.
@Barry
You said:
“I have always suspected that the method of flying the aircraft as proposed by Victor, was in essence to:-
(a) avoid setting up waypoints in the FMC, and thereby leaving a recoverable trace of a ‘plan’.”
I strongly agree with the idea of not having a trace of the plan, and that could apply for the whole flight. So that would say the AutoPilot to VAMPI is not LNAV but by the heading dial, and I may not be putting South Pole directly into the LNAV.
For example, I could turn South after AGEGA since I am not entering AGEGA as a waypoint, I can fly over it and then turn South, if I want to, whereas in LNAV mode the turn starts before AGEGA.
@airlandseaman: As part of the work that will be presented in the joint paper will be a fairly detailed model for climbs and descents that includes a very accurate fuel flow model, as well as thrust and drag relationships. That model has been thoroughly vetted, and is similar in principle to the simplified model I presented above. A complete path that includes calculations from 17:07 to fuel exhaustion, including the climb and acceleration after the turn at IGARI, will be in the paper.
With the data we have, it is impossible to prove that extreme maneuvers (e.g., manually flown turns at high bank angles and climbs above maximum altitude) were not flown. However, I take exception to claims that extreme maneuvers are required in order to explain the data. In fact, I believe the maneuvers were performed with the autopilot and the autothrottle engaged, and operational limits were not exceeded.
@Victor
Some intial NTSB info about Atlas Air Flight 3591 Cargo Plane Crash has come out. no final report yet, and no official conclusions yet. But tentatively it apparently does not look like pilot suicide.
https://twitter.com/Satcom_Guru/status/1207830366662221826?s=20
@Richard. Thank you for your 2 posts on MH370 debris drift from your crash site to Pleiades satellite locations.
If it could be shown that drift to them strongly supported that site that would indeed boost search prospects.
Unfortunately though the below does not help.
The search of the CSIRO’s sites was unsuccessful. One explanation is that their modelling was flawed, though another is that none of the Pleiades items identified by Geoscience Australia as man-made was in fact from MH370. Indeed in,’The search for MH370 and ocean surface drift – Part III’, the CSIRO noted that, “Several high-resolution surveillance satellites were tasked to obtain images of the ocean in the vicinity of the 7th arc while the surface search for missing flight MH370 was underway in March 2014. Many objects of interest were seen in several of these images from a wide range of locations at the time, but none led to any successful recoveries.”
If this was not MH370 debris, the reason no wreckage was found is obvious.
Thence there would then be no reason to suppose that CSIRO modelling was unsound.
Likewise if the wreckage was missed.
A consequent issue is that while you have estimated that debris could have arrived at the satellite locations and on time, the CSIRO concluded that debris would have come from several specific sites but that was not one of them. You can see the problem here, if the CSIRO model still has standing.
If it doesn’t then your use of its drift data may be problematic.
Incidentally, noting the above CSIRO quote, is it possible that the Lido images were discounted?
@TBill: I haven’t read all of the docket, but there were strange things going on with the FO’s display. That said, it would appear the situation was manageable. In “Operations Attachment 2 – Records of Conversation”, it’s clear that the FO’s performance in the simulator was troubling.
@David
As is evident from the Beijing briefing for the NOK in 2014, the search effort was following leads from satellite images provided by the French, Chinese, Japanese, Australians and Malaysians. It is possible that all leads from satellite images were discounted in 2014.
https://www.dropbox.com/s/dsg2lh2h4iqyepj/Beijing%20Satellite%20Debris%20Images.jpg?dl=0
It is clear from the Geoscience Australia PLEIADES 1A satellite imagery analysis and CSIRO Part III paper in 2017, that the French satellite images were not discounted in 2017.
Fortunately, the joint paper that we are currently working on is not reliant on any evidence from the French satellite imagery. I offer the data only to show that it is possible that the cluster of 12 man made objects identified by Geoscience Australia aligns with a MH370 end point at ca. 34.3°S.
In my view, the work done by CSIRO and in particular David Griffin has significant standing and is the most comprehensive MH370 drift analysis to date.
@Richard. “Fortunately, the joint paper that we are currently working on is not reliant on any evidence from the French satellite imagery.”
Thank you.
Prompted by Victor’s simulation of a turnback at 480kts inclusive wind vectors, I revisited my simulations and compare a slower and a faster solution inclusive Wx. The results are written up here and the kmz for both simulations (paths with 1s step timestamps) can be downloaded from the links at the end of the paper.
The bottom line is that both solutions “work” and one is not definitively superior to the other. The work re-confirms that a 180 turnback at 25 degree AOB starting from the IGARI-BITOD leg provides a turnback that matches the available radar data in all critical respects.
https://drive.google.com/open?id=1_hNmswtVvd06c6NiYm5ZydYQIy0keMB6Z7c91YVp4fo
@Paul Smithson: That looks good. We both agree that a quite ordinary turn executed on autopilot using HDG or TRK SEL can match the military radar data when an appropriate level of uncertainty is applied.
The speed data presented in the DSTG report should also be used with caution. In a private conversation with somebody close to the DSTG, he acknowledged that the speed data was suspect, as evident by the extreme values, and should be used cautiously. Yet, people continue to conduct analyses assuming the radar position data is precise, and the derived speeds are accurate. I believe that is a mistake.
Well regarding speed calculations from point to adjacent point radar data, we found the same thing, didnt we! Range data on miltary radar should be good though. So with appropriate processing it should be possible to derive good speed profile should that data ever come available.
@all
I grabbed a quick photo of an A320 “black” contrail the other day, demonstrating that under certain lighting conditions (back-light) the normal white contrails can appear dark.
Could this explain Kate Tee’s “smokey” contrail observation? Normally they say contrails form at high altitude. Not sure if contrails can form at lower altitudes (per Kate Tee) eg; under certain conditions such as higher humidty. I believe I saw a reference saying that the humidity was very high at her location.
https://twitter.com/HDTBill/status/1208152781581946880?s=20
@TBill
Bill, I made some similar observations in an off-line discussion with DrB a couple of months ago.
At low level in high humidities aerodynamic contrails will form. I live on the coastline adjacent to the approach path for the local airport so I often get to see aircraft at low level in high humidity conditions. Contrails are not uncommon, most often just prior to or just after storms or rain. Interestingly, the contrails often don’t propagate from the wing tips but from the outboard edge of the lowered flaps.
Moreover, a contrail in low light conditions or darkness that is backlit to the observer appears black. I’ve witnessed that effect in the evening but have never been able to capture a photo of it.
In fact, in the right conditions not only will contrails forming but you will get ‘clouds’ of over wing condensation forming a mist in the low pressure region above the wing. Sometimes that effect is quite pronounced.
I don’t think that it would be a stretch for the red light from the anti-collision beacons or the red glow from the cabin emergency lighting to make that over wing condensation look like an orange glow at night.
@TBill
Here’s an example of the effect – https://www.dropbox.com/s/0dyrra1ga6grj6b/jet-vortex.jpg?dl=0
@all
I’ve been researching an “off the wall” path for awhile now, and not really getting anywhere. It is well known by experts hired by the CIA that there was a huge red light blinking on the “option” market before the 9/11 attacks. I quote from the “Death of Money” book by James Rickards.
“As the terror clock ticked away, market signals rolled in like a tsunami. A normal ratio of bets that a stock will rise or fall is about 1:1. On September 6 and 7, option bets that United Airlines stock would fall outnumbered bets that it would rise by 12:1. Markets were closed on September 8 and 9. The last trading session before the attack was September 10, and that day option bets that American Airlines stock would fall outnumbered bets that it would rise by 6 to 1.”
“One sided trading, would not be unusual if there were negative news about the stocks. There was none.”
It is safe to conclude that the terrorists and there acquaintances could not resist betting on a sure thing despite the risk of setting off alarm bells. Human nature is predictable. The stocks of UAL and AMR dropped 43% and 40% on the first day of trading after 9/11.
So it would be interesting to see if there was significant put action on MAS stock on the Kuala Lumpur exchange in the days prior to the diversion. The stock was delisted on Dec 31, 2014, and I have been unable to unearth any records. Maybe someone else could give it a shot.
@DennisW
There was a lot of negative sentiment towards MAS stock even before MH370. The airline had been losing money for a number of years due to high operating costs and increased competition, particularly from the low-cost carriers such as Air Asia. It was reported that MAS’ stock price declined about 80 per cent in the five years leading up to MH370 and lost even more ground after the aircraft’s disappearance.
@Andrew
Yes, what you point out is correct. However, a wave of put options would be an indicator that people “in the know” (if there were such people) were attempting to capitalize on a dramatic additional fall.
@DennisW: That is a very clever path to follow. A high volume of put options on MAS stock just before the event would be a tell-tale sign of prior knowledge. I suspect that did not occur, but I applaud you for trying to make that determination.
@Victor
Our intelligence agencies have developed an elegant “Project Prophesy” that monitors financial markets for any signs of impending terrorist attacks on a classified list of corporations and institutions. Super computer stuff. Attacks include both physical and financial attacks. Of course, the intelligence agencies are quick to point out that they are not concerned with domestic issues such as insider trading and do not report suspicious domestic activity to the SEC (if you believe that). You are well advised to avoid any activity that ends up with you baking cookies with Martha.
question from a silent reader:
I’ve read your discussion with interest, but fail to understand why the pre-FMT-path is important. What does it tell us about MH370 final resting place ?
@Dennis W.
Extract below from:
https://www.investing.com/equities/malaysian-airline-system-bhd-historical-data
Not much to see until after. (8th was a Saturday)
Extract:
https://www.dropbox.com/s/4vrdrim962n4d4s/MAS%20Prices%20March%202014.png?dl=0
@David
Yes, the volume and pricing was pretty bland before and after the diversion. Big volume on the first trading day after the diversion, but not much movement on price,
Mick Gilbert,
Nice piece of photography.
@DennisW, @David, @Victor, @Andrew,
The idea from @DennisW about the possibility of a significant put action on MAS stock on the Kuala Lumpur exchange in the days prior to the MH370 diversion, got me thinking. A put option is the right to sell a stock.
Despite the problems of MAS, that Andrew points out, the price of MAS stock was very stable at MYR 0.31 +/- MYR 0.01, during the 30 trading days between 1st January 2014 and 18th February 2014.
From 19th February 2014, in the course of 6 trading days the price fell MYR 0.06 (-19%) to MYR 0.25 +/- MYR 0.01. The new price level stabilised on 27th February 2014 at MYR 0.24 +/- MYR 0.01 for the next 20 trading days until 26th March 2014. This new price level was held even on Monday 10th March 2014, after the news of MH370 had broken over the weekend.
Below is a link to the MAS stock price chart for 4 months from 1st January 2014.
https://www.dropbox.com/s/sypp0hqsqud8wnx/MAS%20Stock%20Price.png?dl=0
The average daily volume of the MAS stock was ca. 15M shares between 1st January 2014 until 18th February 2014. On 19th February 2014, the volume jumped 10 fold to 163.27 M shares. The high trading volume was maintained until 26th February 2014, where it peaked at 246.70 M shares. On Monday 10th March 2014, the trading volume peaked again at 385.06 M shares. The intra-day share price volatility also peaked on Monday 10th March 2014, but was low during January and February 2014.
Below is a link to the MAS stock trading volume chart for 4 months from 1st January 2014.
https://www.dropbox.com/s/11egawuicznvot7/MAS%20Stock%20Volume.png?dl=0
Obviously when the news of MH370 broke there was a high trading volume and high intra-day volatility on Monday 10th March 2014, but interestingly the share price was not affected and closed at the opening price of MYR 0.24. Many traders were wanting to sell shares, but many other traders were wanting to buy shares. The public perception was that MAS stock was still priced correctly.
What is fascinating is the share price drop between 19th February 2014 and 27th February 2014, with significant volumes, but no unusual intra-day volatility. A few traders were wanting to sell a significant volume of shares quietly. The private perception of a few traders with significant stock holdings was that MAS stock was over-priced.
I note the coincidence that the ZS Simulator was uninstalled and deleted on 20th February 2014.
There has been much speculation that the ZS Simulation to the SIO was based on the flight to Jeddah on 4th February 2014 (Sim data last modified 3rd February 2014, fuel amount to Jeddah similar to the SIO). However, there are 3 pilots in the cockpit and this makes a pilot hijack more difficult. ZS also flew to Melbourne on 26th February 2014 and took the opportunity to visit his daughter. Perhaps MH370 was the target all along on 7th March 2014 and easier with only one junior FO in the cockpit.
It is possible that the share price drop between 19th February 2014 and 27th February 2014 was an indication that some people knew, that something was about to happen. It would be interesting to know exactly who sold large amounts of shares during this timeframe in the second half of February 2014.
@Theo
You ask “I’ve read your discussion with interest, but fail to understand why the pre-FMT-path is important. What does it tell us about MH370 final resting place ?”
There are a number of factors that tell us something about the MH370 final resting place:
1. The aircraft performance and possible speed schedules and navigation modes.
2. The location and timing of the FMT.
3. The satellite data from 19:41:03 UTC onwards to 00:19:37 UTC.
4. The fuel range and endurance from 17:06:43 UTC onwards (the last ACARS message with fuel data).
5. The drift analysis of the floating debris confirmed or likely from MH370.
6. The absence of positive identification of MH370 debris from the aerial search results in March and April 2014.
7. The weather data enroute, whether there were strong tailwinds or headwinds and the variation from standard air temperatures, which effects the engine fuel performance.
8. Radar data from MH370 post diversion with known range, bearing and altitude data.
The pre-FMT path is important in order to know the timing and location of the FMT and the fuel remaining for the post-FMT path. The fuel remaining at FMT indicates the likely distance travelled from the FMT and the likely time taken for the post-FMT path. All the data has to align within the error bounds of each data item in order to give a consistent overall picture.
@Richard
RE: ” It is possible that the share price drop between 19th February 2014 and 27th February 2014 was an indication that some people knew, that something was about to happen.”
Perhaps so, but on 18 February 2014 MAS announced a MYR1.174 billion loss for 2013, a particularly poor result that no doubt affected the market in the following days.
https://www.bursamalaysia.com/market_information/announcements/company_announcement/announcement_details?ann_id=2260023
@Andrew
You are quite correct that the share price drop and increased market activity was entirely due to the announcement of the 2013 Fourth Quarter & Full Year 2013 Financial Results on 18th February 2014.
I have just finished analysing the MAS stock price and trading volume for 2013 and the 2013 MAS Annual Report and see a similar pattern of volatility following each MAS quarterly announcement.
There are relatively few major shareholders outside the state owned majority share holder of KHAZANAH NASIONAL BERHAD which owned 69.37% as of 23rd April 2014. Only the top 30 shareholders (mostly wealth management clients of various banks) had more than 10 M shares each and were only collectively capable of creating the trading volumes seen during February 2014.
Sorry @DennisW, but there is no financial evidence of insider knowledge.
@Richard@David
Thanks for looking at it.
@DennisW
It was a great idea. I am normally a fan of “follow the money” to solve a mystery.
However, MH370 appears to be a different category of mystery.
@Theo
Thanks for reading the blog. It has been a long journey since the event and all of the information we now have (and we don’t have all of the information that could be provided for analysis) might have led to some different conclusions from those which have been expressed and reconsidered in the past.
Originally a mechanical problem (fire?) was the hypothesis, and the path of the plane immediately after the turn back at 17:21 was considered to be a chaotic event. The path of the plane after exiting radar coverage (at about 18:22) was unknown. The radar plot of the plane was known only from a photo of a projected image at a meeting of the Next of Kin in Beijing and has never been officially confirmed. Much of what we know came out in drips and drabs and leaks.
For me, the continued scrutiny of the data that we do have to try and gain further insight into the details of the path before 18;40 (the time of the “FMT”) has several objectives;
What is the competence of the person who performed the turn back and the control of the aircraft prior to 18:22?
Does this give us any insight into the details of the mode(s) in which the flight path was controlled (LNAV, manual waypoints, hand flown)?
Can we infer anything about how long the plane had an active pilot?
The last is very important. There is no longer a strong belief in the original view that the end of the flight was a zombie flight and that when the plane ran out of fuel, the descent was un-piloted. Perhaps it was, but that is a belief rather than something that is based on data. This has a first-order affect on the size and location of any new search area. (This is true even if we are absolutely certain of the exact location where the plane ran out of fuel.) The question is whether or not there was a skilled pilot at the controls when it happened and what was his motivation.
We have followed numerous leads, some of which have been dead ends, and some of which have later been recognized as inaccurate.
The recent analysis of the turn at 17:22 is an excellent example of the group, interacting, using bits and pieces of data and knowledge of many people to understand the details of the flight.
It goes slowly.
The latest result on the turn back, which seems quite reasonable, is that it was not performed my manually flying the plane, contrary to some official statements. It has also led to the development of analytic techniques that more faithfully extract information from the radar trace (The fact that the the trace looks like a GPS track is misleading. It is a range and azimuth plot from a distant radar location that has been laid on a map.)
Others may differ with my view and emphasis.
We have no choice but to be patient and persistent.
@Mick
Thank you for the photo.
@Theo
Recently Captio team came out with proposal that RAT was deployed at IGARI, by complete turn-off of all power. Not saying I agree with that, but it demonstrates the range of options for that important period of the flight, and that impacts flight characteristics, and among other things suggests flight data recorders might be off (which I do feel is possible).
@Richard
However, MH370 appears to be a different category of mystery.
Yes, it deserves the mystery moniker.
Another interpretation for the lack of suspicious stock market activity is that the people in the know, if there were such people, were not expecting the aircraft to be lost.
I recall hearing the news about 9/11 sitting in my office. I would characterize my feelings as resembling a state of shock. The cold blooded “smart money” types immediately shorted UAL and AMR, and made small fortunes on the finite delayed reaction time of the market to the tragedy. My mind simply does not work that way, and I am not dissappointed in myself.
@Richard
I have revisited my analysis of the 186T path (18 Sept) posted on this thread. Previously I had used a path from 18:22 to the end and a constant Mach. I still consider that it is correct, but wanted to see if restricting the analysis to the portion beginning at 18:40 would yield any further insight.
So, taking the initial point at exactly IGOGU and a starting time of 18:41.00 with a heading of 186T, the results were slightly better. The difference is unlikely to be statistically significant. But, for comparison with any study you are doing, the M=0.833 and the TAS=485.9 at 18:41. I do not specify a FL, since you are using a different set of Met data. It seems to me that you would choose an altitude having the temperature implied by the M and TAS.
Barry did include a LRC fuel model but I have not used it up until this point. (It would take too long to explain my philosophical reasoning…) But, using LRC the initial M=0.84 and the corresponding initial ground speed of 490.0, at 00:11, the fuel remaining is 264kg.
Starting exactly at IGOGU corresponds (I think) to a hypothesis involving the offset path after 18:25, and cancelling the offset at IGOGU so that the fight becomes aligned with a 186 radial. There are other similar options. This does not require a climb or descent. But, for the period between 18:25 and about 18:40, the path is offset and so a slight change in altitude could be safely executed.
Flying at a 500ft spacing to cross the paths of other aircraft would pose little risk as all aircraft flying such long distance height altitude routes are fitted with modern instrumentation and controls and a 300ft deviation from the assigned flight level constitutes a violation of the rules.
@George G
George, just to be clear, I didn’t take that photo.
@Sid Bennett: Out of curiosity, is temperature offset from ISA conditions included in the calculations? And what assumptions are made about the flight conditions between IGARI and the FMT?
@Victor
Yes, Barry’s model includes data from the GDAS archive. Typically it is +8K until later in the flight when it decreases. (spread sheet column AP) It is never negative.
The model also includes the wind speed and direction. The effect of the winds on ground speed may be greater than any temperature variations.
Perhaps there have been improvements in forecasting of these parameters in remote areas where there are no pilot reports or ground stations. I take all such met data sets as being indicative rather than precise.
Previously I have “navigated” between IGARI and the FMT by putting in a (f memory serves) about a 12nmi offset to the North and cancelling it at IGOGU. In the data quoted here, I presume arrival by any path at IGOGU and use it as the start point. I found 18:41 to be slightly better than 18:39+, which I use in the full path. I believe this arises from differences in the detail of the treatment of turns.
@Sid Bennett: I should have been more clear. I was referring to the effect of temperature on the LRC fuel model, which is substantial (3% per 10° of TAT offset from ISA).
Also, there is a significant temporal variation in the wind and temperature fields on that day. The GDAS data has to be interpolated between the time values we have. That is something that Bobby, Richard, and I observed when we began comparing results.
Finally, to properly do fuel consumption calculations, it is important to include best estimates of the flight conditions after the turnback at IGARI, where we believe the aircraft flew at high altitudes (around FL385) and at high speeds (around Mmo = 0.87).
@Victor
Let me be clear. I am not an expert on fuel consumption models. Barry’s model seems quite comprehensive, but I cannot judge. It is well documented in his published spread sheets.
I do not wish to debate Met models in the SIO. If you doubt my results, it is pretty easy for you to simulate them, providing you choose a FL that is consistent with the temperature implied by the initial M and TAS at the FMT. In all of my simulations I hunted for the optimum conditions subject to the limitations of the input parameters to the model.
I cannot comment on your hypothesis of a high speed transit between IGARI and IGOGU, but I do not find it necessary, even with the additional path length due to the lateral offset.
@Sid Bennett said:
I am not an expert on fuel consumption models.
I do not wish to debate Met models in the SIO.
I cannot comment on your hypothesis of a high speed transit between IGARI and IGOGU
As you wish, but to accurately calculate fuel consumption, effects such as PDA, ISA temperature offsets, meteorological conditions, and extreme speeds after the turnback all have to be properly included (as do other phenomena such as turning off the air packs).
@Victor
The first sentence is a statement of fact. I did provide a reference to a publicly available model that can be evaluated by someone who understands the specific subject. I can send you a copy of the spread sheet in you don’t have it. As for me, I am just a user.
In the second sentence I speak from some experience and some reading. Many years ago, my field was ionospheric physics and I spent a great deal of time plotting and analyzing sounding data obtained at geographically dispersed ground stations. I also used this data to perturb the monthly median diurnal values to derive a “real time” model taking account of solar terrestrial events. Then as now, there are insufficient data points to provide accurate small scale geographic maps of F-layer ionization, for example (which can be quite large). Some aspects related to absorption events are accurately predictable and related to solar parameters (X-rays and energetic protons). As I read about the met modeling, I realize that at 250hpA, for example, is like rudimentary weather forecasting and as the interest is in large scale effects the granularity is correspondingly large scale. Since tropospheric morphology is not within my work or research experience, all I can do is speculate.
Having said that, anecdotally we know from flying commercially that the “details” of the jet stream are most often gleaned from pilot reports of winds and CAT. A person who is directly involved in the development of the models could better comment, but there does not seem to be one on this blog. For example, are the contours at 250 and 150 strongly coupled, and what is the physical mechanism?
The effect of temperature variation with latitude in a median sense is that it seems to be steady at low and mid latitudes, eventually decreasing towards the poles. By seeking an altitude having a “suitable” temperature regime, using the average needed TAS and M as a disposable parameter, one can find a solution in altitude. That’s what you and now I have done, having no independent criteria (except that it is above the tropopause).
The jet stream is more clearly demarked and can have a significant impact on fuel consumption as evidenced by the oceanic track system. On my recent flight (B777) from London to Chicago, we went North of Iceland. I was amazed to follow the flight path due North from LHR for at least an hour before we turned West. We arrived on time!
Both of us consider the winds in the model. In my paper I present a graph of the along path winds and they are fully considered in the computations.
Finally, while I did not wish to comment on your proposed path without seeing the details and the supporting reasoning, I cannot help but respond in part here. After 18:22 there are only a few milestones I presume that we agree on. (And then I get hints that we don’t).
A FMT occurred at about 18:40 at about IGOGU. The plane turned towards the SIO. Powered flight continued until about 00:15 and the last known position was an determined by a handshake at the 7th arc. The longitude of the last position is to be determined and the trajectory after the second arc is to be determined.
If you have other factual evidence I certainly do not.
@Sid Bennett: I have the utmost respect for Barry M., but at this point, I’m not going to reverse engineer the spreadsheet that he created 5+ years ago because I know there are more complete models available, such as the one that we’ve been developing. I’ve pointed out some of what needs to be included in the fuel model in order to make accurate predictions of fuel consumption. I’ve also explained that the GDAS meteorological data needs to be interpolated in time to accurately re-produce the wind and temperature fields. Any claims about fuel consumption that don’t include these effects (including but not limited to PDA, ISA temperature offsets, temporal variation of meteorological conditions, extreme speeds after the turnback, air packs off) will produce results that are suspect.
The last sentence of the penultimate paragraph of my last post should read *seventh arc*
@Victor
We shall have to agree to disagree. But I since I have not had toe opportunity to read your case, I am certainly willing to be convinced.
Mick Gilbert said on December 23, 2019 at 4:56 pm
@George G – George, just to be clear, I didn’t take that photo.
Realised that. Just that it is a nice piece of photography. Happy Christmas.
@all
While for personal reasons I decided some time ago to stop participating in the discussions here, I’m happy to accept Victor’s invitation to share a summary of my work with you, including some recent results not shared here before.
I will be around for a short while to clarify and react to comments.
Hat off to all here who continue to add pieces to the puzzle despite often busy daily duties.
With 2020 around the corner: Best wishes to all of you!
Niels.
https://www.dropbox.com/s/hm85aq161pfsx0s/MHsummary_Dec2019.pdf?dl=0
Thanks Neils.
Yes,
Thanks Niels,
Happy New Year 2020.
@ All – Wishing you a very happy New year and all the very best to you and your families. This blog has been such a source of knowledge and reading pleasure for these past several years for many readers like me and want to thank each one of the contributors for giving us an opportunity to read your detailed thoughts, analysis and inputs on a quest to solve an unprecedented mystery like MH370.
Looking forward to reading the new paper in 2020 and to hopefully find closure for the families of the passengers of MN370 in 2020.
Happy New Year to all.
My best wishes for 2020 to all the contributors and readers here.
Don
Best wishes for the New Year, and perhaps a bit of luck as well.
Sid
As a regular reader of this blog, I wish the best for 2020 to all people trying to bring their stone to resolve the mistery… And many thanks to Victor for maintening the discussion and the hope alive!
In an article apparently published on June 17, 2019, FoxNews wrote “A Houston company is finalizing a contract with the Malaysian government to resume the search”. Has anybody hear of this?
@Niels
Thank you for the paper.
I now appreciate that your earlier papers considered BFO drift in the magnitude I am thinking.
@all
My email response to Niels from his sending his summary to me before posting it here.
Nice work, as usual, Niels.
There is convergence between your work, Godfrey et.al, and the original Inmarsat paper. That convergence, however, largely ignores the fact that the area of convergence has been searched, and the 00:19 BFO data strongly indicates a rapid descent (indepedent of AES oscillator drift).
As you know, I am troubled by the uncertainty associated with the BFO data. There is no way to know the oscillator drfit during the flight, and we have data from the same aircraft that shows very large AES oscillator drift excursions. I would love to have the Inmarast data for the 20 or so other flights of 9M-MRO, but it has not been made available. Not sure why. That would go a very long way toward characterizing the reliablity of the BFO metric. Good BTO fits can obtained for a large family of paths that do not end near 34.5S.
Also, the behavior of the Malaysian government during the time closely after the diversion, is highly suspicious. As is the flight path selected for the diversion. A murder/suicide motive is not readily attributable to the flight path, the MAS actions, or the mindset of Shah. I feel quite strongly, that there was a reason for the diversion that was not murder/suicide. All those things lead me to be very supicious of the path South strongly indicated by the analytics.
At this moment I feel that the Iannello path toward the Cocos makes the most sense as providing a last opportunity before the aircraft was allowed to plunge into the sea.
It will be interesting to see the work of the latest summary of path analytics (assuming it is ever made public). I am quite prepared to bash it on several bases. Bring it on.
@DennisW
I am so glad to hear you are ready to “bash” the upcoming paper, which you have not even seen yet.
We sent an advance copy to everyone else, except you! 🤫
Actually, the paper is in the final stages of preparation. 🤣
What is time consuming in the analysis and preparation of the paper, is additionally preparing answers to potential criticism like yours, based on your pre-conceived ideas of what the paper actually says. 😅
You never know, you might even be positively surprised! 😳
@Richard. One thought in case it has not popped up in your assessment.
Damage to the aircraft, eg @Mick Gilbert’s window implosion, that disabling the flight deck crew, has not been entirely ruled out yet, I think, though subsequent navigation renders that unlikely.
Same time, higher fuel consumption, slower speed, less distance, ending up more up north.
I assume that your finding would rule that out so there would be no need for an assumption of no damage.
Clarification. Higher fuel consumption vs distance.
@Victor @all
Re: MH370 on FR24 & Pilot Report near MH370
YouTuber “fritzerellie” has posted several different useful FR24 videos for MH370 (and other air accidents). The video below captures best what is going on offshore Vietnam until 17:37 on 8-March-2014:
https://www.youtube.com/watch?v=qsh592Lr6zE
New (for me anyway) is some air traffic offshore Vietnam reasonably close to McKay’s oil rig. At 17:31 a UAE flight heading westbound suddenly pops into ADSB coverage heading to Vietnam. We actually apparently have a first person report from the UAE pilot:
PPRUNE
8th Mar 2014, 07:52
“We entered HCM FIR last night westbound at FL340, passing Moxon (the boundary with WSJC) at about 1720Z, transitted HCM and Phnom Penh and exited, passing overhead PNH at about 1810Z.
We experienced no problem with VHF Comms with HCM Centre, and VVTS CPDLC/ADS also worked fine. We encountered no adverse wx – in fact it was a beautiful clear NE monsoon night, though there was some limited scattered lightning visible way off to the SW.
121.5 was congested, with both HCM Centre and another MH flight trying to contact MH370. HCM Centre were also making repeated attempts to contact the aircraft on the normal Centre frequency.”
TBill back-
I estimate UAE might have been 350nm away from MH370 at the time of the alleged “garbled” reply transmission. Note that UAE is not reporting to have heard that. On the same PPRUNE (MH370 Day-1) page, flight weather expert Tim Vasquez makes his first MH370 report stating mostly clear at IGARI thru Vietnam (he provides radar image) thus I can only imagine the distant lightning referenced by UAE was extremely far off in distance.
@Dennis
” A murder/suicide motive is not readily attributable to the flight path, the MAS actions, or the mindset of Shah.”
Many would beg to differ. There is nothing, I repeat nothing, aside from speculative inferences and assumptions, that works to disabuse one of the murder/suicide theory. Your application of ‘precedent’, so as to attenuate murder/suicide, in regards to both the flightpath and mindset of Shah is neither useful nor illuminating.
MH370 is very clearly a one off event without similar historical precedent. The ‘mindset’ of Shah is of course completely unknowable. Despite this, you continue to incorrectly and disingenuously (or naively?) put forward the falsehood that Shah was not exhibiting symptoms ‘typical’ of a would be murder/suicide.
In fact, though as mentioned earlier Shah’s mindset is ultimately completely unknowable, there are some very troubling signs to be found in Shah’s social media activity in the months leading up to the MH370 event. In particular, Shah exhibits on numerous occasions a high degree of recklessness and untoward behavior, most unbecoming of a senior pilot to be sure. I am happy to post his social media ‘flirtations’ as evidence if you would like? I am also happy to educate you on how and why this type of recklessness Shah demonstrates is deeply troubling and is quite typical during the lead up to suicide? Along with ‘clinical’ depression, engaged in reckless behavior that is unconcerned with consequence is the best indicator we have of a coming psychosis. Respectfully, you seem to be unpersuaded by this and instead cling to this unsubstantiated (in point of fact, refuted) notion that Shah was of sound mind. Geesh.
@DennisW
I understand and share some of the concerns about the BFO error characteristics in the light of the oscillator drift. I agree we would be helped much if the data from the 20 previous flights of 9M-MRO would be made public. Nevertheless: both my combined BTO/BFO as well as BTO only analysis for the combination LRC + straight (TT) give similar solutions, which suggests that the drift is not as “wild” as you may fear. You could of course argue that this doesn’t prove much, as perhaps the combination LRC + straight path is not the one that was flown. In this case the straight 180 degrees, FL350 result would be a surprising coincidence. It cannot be fully excluded. I’m trying to make the case stronger by analyzing other combinations with similar methods. I’m currently busy analyzing the combination of constant M + straight path. So far with little success. Other options I’m considering to look at is the combination LRC with “curved” paths based on CMT, CMH, CTH navigation. CMT should not be too difficult to implement in a similar fashion as I’ve done for CTT. I would be surprised, if such a curved path generated the data, that in reverse this data through the procedure that I developed would give such a straight path solution at a common FL. However, it can only be excluded fully by explicitly checking all possible combinations of common speed/navigational settings. This is a precise and time consuming job.
Regarding your “I feel quite strongly, that there was a reason for the diversion that was not murder/suicide”: I have similar feelings, however without knowing the reason and the sequence of events on board the flight I don’t know how to use any of these intuitions to prefer or reject a particular path.
@Donald
your text:
you continue to incorrectly and disingenuously (or naively?) put forward the falsehood that Shah was not exhibiting symptoms ‘typical’ of a would be murder/suicide.
I assure you it is naivity. I try hard to avoid being disingenous.
All,
Recently I have been exploring the various ways in which Bayes Theorem is used and decided to have a go at applying it to the recent work by Ulich (post from May 31, 2019) and Godfrey et al. (current post June 30, 2019). A preliminary version of a report can be found here:
https://docs.google.com/document/d/1qDWTTxKDdw_jkgYCcaFwTnxYnZNPb67Z0WckIODf8Jk/edit?usp=sharing
If I have misrepesented the work of any of the above authors, please advise and I will correct.
DennisW is welcome to bash it.
On a separate note, I have been following some stories of people who go missing in the wilderness and was even prepared to conduct a search of my own for one particular individual, except the remains (presumably of him) were just recently found. It turns out that multiple search parties has walked by that spot (as close as 60 feet) and just missed him. So my prediction (sure to be wrong) is that MH370 is in an area already searched, and it was just missed.
@David
You ask whether we have considered damage to the aircraft such as @Mick Gilbert’s window implosion, that disabled the flight deck crew.
We have considered in the course of our analysis, an aircraft failure, fire, decompression, terrorism, hijacking and pilot suicide, as the reason for the diversion.
The fact that the aircraft continued flying for almost 7 hours after the diversion and no attempt at an emergency landing was made (as is evident from the military or civilian radar data over Malaysia), contra-indicates a major problem with the aircraft.
In @Mick Gilbert’s scenario, subsequent navigation of the air turn back across Malaysia and the FMT without a pilot is unlikely, as it implies the subsequent route was entered into the FMC by the pilot, as soon as an impending implosion was detected and before the implosion actually took place. The fuel analysis does not show an increase in drag, as would be the case with a cockpit window implosion. As you say the flight would take the same time, with a higher fuel consumption, slower speed, less distance travelled and end up more up north. The satellite data, GDAS data, fuel data, drift data and aerial search data all contra-indicate a more northerly end point.
Your assumption is correct, that our finding would rule out aircraft damage.
@Niels
Thank you for your post dated 31st December 2019. it is an important body of work and there are a number of points, which I find particularly interesting:
1. Your concern that some manoeuvring was perhaps still ongoing in at least the first hour after 19:41. I would not go as far to say as long as for 1 hour personally, but perhaps within the first minute following 19:41:03 UTC. We have investigated the possibility that a manoeuvre was still ongoing at 19:41:03 UTC for a number of seconds.
2. Your conclusion of the LRC Speed Schedule aligns with our findings.
3. Your concern regarding BFO drift and analysis of a range of 00:19 latitudes between 31°S and 38°S with a BFO offset between ±4 Hz. Your conclusion for a zero offset, that a path was found with a track close to 181°T and a 00:19 latitude of 34.9°S.
4. Your decision to implement an elliptical earth model using the WGS84 coordinate system to improve accuracy.
5. Your decision to use the BTO data and conclusion of a 180.0 track ending at 34.5°S.
6. The only area of disagreement is the flight level. Your best fit is FL350, whereas we have a best fit at FL390.
In summary, a strong alignment between both our results.
@Richard @Niels
On Richard’s Item-3 BFO drift +-4, which direction of drift are we expecting? I am thinking if we have BFO drift it is -4 consistent with 31 South. It I have my signs correct, that would be roughly consistent with the pre-flight calibration. So 252 BFO at Arc6 normalizes to 248, if there is a correction to be made.
@DennisW
Thank you for being open and honest about your Niels paper pre-review and I appreciate your intellectual consistency over the years. I was a little worried when your academic friend’s paper came out at 34-35 South too.
@TBill
My comments on the latest paper from @Niels were from my personal email to him, as he was kind enough to send me a copy in advance.
The idea to test a BFO Offset +/- 4 Hz was a clever idea from Niels.
I can ensure the upcoming paper will answer this point in full, even for DennisW.
@sk999
DennisW is welcome to bash it.
You know I am always there for you sk.
My consistent skepticism and criticism of statistical approaches to the MH370 flight path (DSTG, Godfrey et. al., yours,…) has remained the same over time. That is, the BFO bias variations over the duration of the flight will not have a zero mean relative to the bias measured pre-flight in KL. The error in the BFO measurements cannot be modeled in any meaningful way. Selecting bounds on the error with the limited data we have is about the best you can do.
@DennisW
What if, …
We prove the result without using BFO data …
@Richard
I sincerely wish you the best in that effort.
@Richard
Not using the BFO makes the problem easier and much less convincing. The aim is to get a joint minimum of the BFO and BTO errors.
@Sid Bennett: The point is the recommended search area is the same whether or not the BFO statistics are included. That is QUITE persuasive.
@Richard. Re the damage possibility, thank you. I did not have just the window implosion in mind but I am glad you are confident of dispensing with that in the general.
There’s a new documentary from Sky News. From an article in the Herald Sun:
Explosive new information, including allegations of government cover-ups about the greatest aviation mystery of all time, is set to be revealed in a Sky News investigative documentary about the disappearance of the Malaysian Airlines flight MH370.
I don’t expect to see a lot of new information, although they seem to be hinting that high-level officials suspected early on that the captain diverted the plane. It also looks like they will tout Simon Hardy’s prediction of an impact at 39S latitude after a glide.
@Richard
Thank you also for your input/work.
@Victor
OK good I heard innuendo on Twitter something like that was coming. I can stop waiting for the other shoe to drop.
@Victor. I gather Ean Higggins of The Australian is involved so can imagine what the “government cover-ups” will be.
Readable links:
https://www.pressreader.com/australia/the-sunday-telegraph-sydney/20200105/282093458665339
Ugh we have to wait for 19-Feb
For those that cannot access the Herald Sun article, this PDF should work.
@TBill
@DennisW
and others who doubt the usefulness of the BFO data.
Please take a moment to read the Ashton (Inmarsat) paper, starting at p11 and particular section 5 including figs 11-13.
The nominal BFO offset surely does change with time! It looks random, except for the strong solar eclipse effect. Surely we all agree with the inclusion of an offset due to the solar eclipse in any BFO correction model.
Some years ago, I modeled the relationship over the 24 hr period between the measured satellite temperature and the change in translation osc frequency. Excerpts from that analysis and other related papers may be found at:
https://www.dropbox.com/s/1d7ioamhqbzogi1/BFO%20documents.pdf?dl=0
Although we have only one day of this particular data set (Temp and Offset), it seems reasonable to assume that the temperature is a composite of two effects. The first, having a period of a sidereal day relates the the changing aspect angle of the sun on the satellite and the satellite being asymmetrical to a variation of the energy input from solar radiation. The second, is the obvious eclipse effect, would occur only in the equinoctial period where the Earth’s shadow is approximately through the orbit of the satellite. (This is an interesting aspect of celestial mechanics that might be relevant to other test flights as the duration and commencement of the eclipse is entirely predictable..someone else may have that data and I hope it might be published.)
In any event, the change in oscillator frequency is about 35Hz, and the effect on the BFO is about 11.5Hz, which is entirely consistent with the error in the algorithm for correcting for the satellite downlink error. (about 33 percent error)
So, the sidereal effect, which has a peak-to-peak error of about 23Hz, results in a sidereal (ok, diurnal is close enough) error of about 8Hz p-p. This error is deterministic, and could be predicted for other flights if we had the satellite temperature data. But at least we have it for the MH370 event and that is the BFO that we need to analyze.
The data that is presented for other flights may in some cases identify the eclipse effect, but they do not identify the diurnal effect and this is a significant contribution to the apparently random error in the BFO bias when comparing different flights.
Everybody looks at the data in a different way, depending on the importance that attached to a particular parameter. The “officals” in their subsequent work were content to accept a high random error in the BFO as they apparently didn’t think it would make a difference. After all their analysis was dominated by statistics.
Most models consign unknown sources of error to the realm of statistics. Understanding the underlying nature of the physical processes enables us to reduce that amount of error that needs to be attributed to random processes for ease of mathematical modeling.
Conclusion: The BFO bias temporal variation is highly predictable for any flight if we have the appropriate satellite data or a model thereof. We have that data for the MH370 flight and an adequate model.
@Sid
Conclusion: The BFO bias temporal variation is highly predictable for any flight if we have the appropriate satellite data or a model thereof. We have that data for the MH370 flight and an adequate model.
There are three oscillators which can affect BFO bias. The oscillator in the satellite (a crystal oven oscillator), the oscillator in the aircraft (also a crystal oven oscillator), and the oscillator in the ground station at Perth (most likely a cesium reference).
The satellite oscillator is only one component in a chain of references all of which are subject to random walk behavior that is neither stationary nor ergodic. Your conclusion is out to lunch.
@DennisW
Do you not agree with a) the correction due to the Eclipse associated with the translation oscillator? b)with the fact that the translation oscillator frequency is highly correlated with the satellite temperature (and is therefore not well temperature compensated? c) with the fact that the aircraft has a temperature compensated crystal oscillator and is operating at a constant ambient temperature (during the relevant period of time?, or d) that the frequency error of a cesium clock (incorporating a crystal oscillator slaved to it) is zero mean as it is the standard used in the definition of the second.
Undoubtedly the crystal in the satellite is in an insulated housing, but from the point of view of the satellite operator, the temperature variation that it exhibits is well within the operating error budget of the Inmarsat communications protocol. So, it is the only one of the oscillators that is not tightly controlled, and this is probably to minimize electrical power consumption on the satellite.
Each of the oscillators has its individual characteristics, and the frequency stability of each is different. But in the operating environment, only the satellite oscillator exhibits a significant temperature sensitivity in the steady state operating enviornment which has a temperature variation.
I am not personally familiar with each of the oscillators, but I speak from a certain amount of professional experience.
airsealandman may have an opinion based on more specific data.
@Sid Bennett: The oscillator in the satellite might exhibit the more drift than the oscillator in the SDU, but we compensate for that drift in the BFO calculation by using the measured drift of the pilot signal sent from Burum and received in Perth. On the other hand, there is no compensation for drift of the SDU’s oscillator.
@Sid
Personally I am very BFO-centric.
I take BTO for granted or could be off a little due to winds etc.
I look for good BFO match, realizing it might have drifted slightly.
BFO data looks solid to me, however a few units off potentially makes a big difference in end point.
For a flavour of the forthcoming Stefanovic-Higgins documentary, click here.
Code: 75008F
If anyone recognises the contributor at 01m31s I’d appreciate an update.
@VictorI
“We”?
I assume you use the tabulated Inmarsat data for BFO and BTO. The predicted data uses a nominally sinusoidal error model(attributed to you).
For a BFO measurement during the eclipse, the Inmarsat correction of 11.5Hz needs to be applied to the predicted BFO. You can see this in Ashton Fig. 11 where the sinusoidal residual has a dent at the eclipse time. [This issue is separate from any channel-based minor adjustments.]
Do you have additional satellite pilot data? Is the Ashton paper incorrect?
@Don Thompson
Thanks for that link/password for the trailer, Don. That is Captain Mike Keane at 1:31.
@Sid Bennett: To calculate the effects of the satellite oscillator drift on the BFO, you can either use the tabulated data from the ATSB report from June 2014, or the graphical data presented in the Ashton paper. If you use the tabulated data from the ATSB report, you need to add in the C-band Doppler to the EAFC and satellite drift. In the Ashton paper, that C-band Doppler is already included, so what’s reported is the frequency error after EAFC, C-band Doppler, and satellite frequency drift. If you use my sinusoidal term for EAFC, then both the additional shift for temperature and C-band Doppler needs to be included. Any of the three methods produces the same result if properly applied.
@VictorI
Thank you for clarifying the issue. While the alternative methods should result in comparable (well, almost identical) results for the MH370 analysis, they do not do so for other test flights where there are different sampling times in the diurnal cycle; and that is the source of many misunderstandings about the stability of the underlying bias value.
The sinusoidal model appears to be sufficiently accurate when corrected for the temperature variation of the translation oscillator.
Measurements at other times of day (excluding the eclipse periods) will appear to have bias errors of about 8Hz p-p. This is interpreted by some as implying that this error is statistical in nature. Rather, it is a mostly deterministic effect based on the temperature of the satellite.
My objective in belaboring the point is to put to rest some of the comments regarding the underlying statistics of the BFO. In an error model, the variance due to the compensated satellite motion should be very small, that of the satellite translation oscillator similarly small (if corrected for temperature) and the OCXO of the aircraft quite stable after warm up (but there may be a step offset that could occur during a off-on cycle of the equipment). I have been using a 1Hz RMS value in Barry’s model.
Again, I appreciate your patience in the reply as I have taken only of the possible approaches to utilizing the available information.
@Sid Bennett: As long as the BFO calculations used to generate the statistics for the test flights used the (previously recorded) pilot frequency errors (as they were used for MH370 and MH371), I believe frequency drift of the satellite oscillator is properly compensated. I have no reason to believe that Inmarsat and the DSTG incorrectly calculated the BFO for those flights.
@Sid
I suggest you take a look at the DSTG book Figure 5.4.
@DennisW
Yes, I am aware of 5.4 and included it in the note that I referenced in a previous email. But, looking at 5.5 one can see that the particular event was unique and formed the far end of the negative error tail. It is 5 standard deviations from the mean value. The DSTG is also puzzled by this particular result which suggests that it is unique in the data set.
However, the data of 5.5 has a substantial component that can reasonably be attributed to the temperature variation.
That’s it for the evening….
@Sid
I do not agree that the event of Fig 5.4 was unique. I would be inclined to believe that it was a worst case event. In private emails with the DSTG, they are aware that BFO measurements are not well-represented by an RMS charaterization, and they understand the non-ergodicity and non-stationarity of the BFO observations.
Your attempt to put to rest some of the comments regarding the underlying statistics of the BFO. is futile and misplaced. Give it up, please.
Question: Does anyone have info on the times of station-keeping maneuvers for IOR?
@DennisW
I am sure that the variation of oscillator frequency is not a white noise process. Fig. 11 shows that. It has a very small ARW and some quasi-periodic components with a nominal period of 5 or more hours (excluding the eclipse as a separate effect).
I only suggest an electrical engineer’s approach to quantifying the apparent error for comparison with the data of Fig. 5.5
http://www.amostech.com/TechnicalPapers/2015/SSA/Decoto.pdf
Just to throw a little more fat on the fire.
The Inmarsat 5F1 has ion propulsion station keeping. This appears to require small corrections which may be made on a daily basis. There are others who were involved in the early days of our work who dealt with the TLEs. What the manifestation of low impulse orbital correction in the Doppler shift would look like is something I would not speculate upon without further consideration.
@Sid,
I recall ( but maybe not accurately) that 3F1 performed a station keeping manoeuvre the day before MH 370 departure, and that due to fuel constraints such adjustments were infrequent.
I think Duncan Steel originally provided the TLE data, and I know that he has contacts who might be helpful. You probably still have an email address for Duncan, otherwise I could help.
@Brian
Thanks for the suggestion. I will contact him.
My limited reading on the subject suggests that when near end of fuel supply, the N-S portion is allowed to degrade, but the E-W orbit needs to maintained.
3F1 performed a small East-West 80 second burn a day before MH370.
Ref: Inmarsat/Royal Society Q&A 7 October 2014
Sid Bennett,
In the ATSB report of June 26, 2014, Inmarsat provided a table of positions and velocities for MH370 at several times of times before and during the flight derived from its own tracking data. These would have accounted for the impact of any burn. Any impact was small, and had one used a prior TLE it would not have significantly affected any calculation. These details were checked by myself and I am sure by many others at the time.
Yes, I3F1 had a station keeping burn the day before MH370. A couple of mouse farts. We knew that within days of the event. The orbits were calculated and recalculated using different methods to take into account the burn. This is all very old news. The ultimate orbit is good. The 7th arc I provided to OI 2 years ago was within 70m of the arc computed by Boeing 2 months later.
@airsealandman
I believe that. I remember it.
The question on the table is whether a similar fart occurred on 2 March.
We are trying to resolve the anomaly in the BFO error for the flight on 2 March.
@Sid
There was no BFO “anomaly”, It is the within the bounds expected behavior of the AES oscillator.
@DennisW
What is your evidence for the statement apart from the DSTG report? Do you have data on the oscillator itself?
@Sid
I do not have data on the particuar oscillator used in the AES. However, it can be broadly characterized by its class.
@DennisW
Broadly speaking, you are wrong. I will not be provoked into a flame war. It does not serve the purposes of this group. Facts matter.
@Sid Bennett, @DennisW: In the DSTG report, there were 6 validation flights, as presented in Table 9.1. Of those six, only one (KL-Amsterdam) was reported to have occurred during an eclipse, and a different one was reported to have outlier BFO errors (Mumbai-KL). We also know based on the work of Richard Godfrey and sk999 that there were no large drifts of the fixed frequency bias (FFB) for the measured BFOs for MH371 (from the complete Inmarsat log) and for MH16 (as reported in Ashton’s JON paper).
Can we be sure that there was no large excursion of the FFB during MH370 as was seen in the Mumbai-KL test flight? I don’t think we can be certain. However, it does it appear that BFO excursion seen in the Mumbai-KL flight was an outlier, and it doesn’t appear to be related to an eclipse. Also, we are finding a high probability for the BEDAX-South Pole path whether or not the BFO statistics (and assuming only a small shift in FFB) are included, which is fortunate. Hopefully, that can be presented in more detail soon.
[I now see that in Table 9.1, the KL-Frankfurt flight also had outlier BFOs.]
@Sid
Have at it. I am not trying to provoke you or anyone else.
@Victor
Yes, we have plowed that ground many times.
As Sid says, facts matter, and the FFB of the Mumbai-KL flight is a fact. Most people here believe there was a physical underlier (not identified), and the data in Figure 5.4 of the DSTG Bookrepresents an outlier. I regard that thinking as potentially dangerous.
Looking forward to reviewing the analytics you, Richard, DrB,… are working on.
@VictorI
I believe I have located the crash site of UIA flight PS752, flying from Tehran to Kiev, Ukraine.
Please compare images below …
https://fararu.com/files/fa/news/1398/10/18/604220_743.jpg
… and Google earth.
35.561192, 51.103928
Lot’s of questions about the timing of this event, and why this happened.
@VictorI’
Nothing that I have written should be taken to cast any doubt on the validity of the BFO data, as now being used, as a essential discriminator for selecting the flight path.
However, these are interesting anomalies and since the BFO in fig 5.4 has a duration of nominally an hour (and thus successive measurements are highly correlated), it is not a standard statistical glitch.
Something changed the total frequency offset from the plane to the ground station in a systematic manner. I doubt that it is relevant to the present case, but I would rather understand the data than ignore the data and dismiss it as a statistical outlier.
Since the failure of the search efforts all of us have spent a considerable period of time re-thinking the available evidence to eliminate errors or to gain additional insight into the human and physical aspects of the case.
I would argue, as an alternative, that even in highly unlikely event that the anomaly was “statistical” in nature, the remainder of the statistical analysis in the DSTG renders its occurrence during the MH371 event implausible.
However, I would remind everyone that it is only the identification of the eclipse effect and its correlation with a BFO offset that prevents us from arguing the same thing about the MH371 data or attributing the eclipse effect to a maneuver of the aircraft.
@Richard et al.
Without attempting to make your task any more difficult than it is, I believe that some attention ought to be paid by this group to a Bayesian interpretation of the new result, since we have additional prior information at this juncture. Any new result itself that results in a new search will need to consider this. That does not mean that I expect your paper to definitively address the issue.
Is it worthwhile debating the concept now, or should we put it on hold?
@Sid Bennett said: I believe that some attention ought to be paid by this group to a Bayesian interpretation of the new result, since we have additional prior information at this juncture.
I don’t know what new result you are referring to. We have no new data that I’m aware of. We are re-hashing discussions that we’ve had for years now.
However, I would remind everyone that it is only the identification of the eclipse effect and its correlation with a BFO offset that prevents us from arguing the same thing about the MH371 data or attributing the eclipse effect to a maneuver of the aircraft.
Again, I really don’t understand your statement. Yes, the eclipse has an effect on the BFO, but it should NOT have an effect on the BFO error calculations if the measured and recorded pilot frequency error is properly incorporated into the BFO calculation.
@CanisMR: Yes, there are lots of questions that demand an answer. The FDR and CVR should reveal a lot. Hopefully, Iran allows a reputable country to analyze the data, and that data is then released. If the plane was downed, certainly Boeing will advocate for the truth in order to (justifiably) deflect liability. Some say that shrapnel holes can be observed in some of the debris. On the other hand, an engine that flies apart can also produce a lot of high speed projectiles. I see that French media is now reporting that Iranian sources have tweeted a photo showing a missile head that was recovered close to the debris field.
My guess is that we will learn a lot more soon.
@VictorI
I thought we settled the BFO question some time ago. (except for DennisW, although I would like to get his support for the result) Our recent discussion resolved that there were several ways to derive the diurnal variation due to lack of full compensation (e.g., your sinusoidal model) and due to the temperature sensitivity of the translation oscillator (e.g., the eclipse effect). Let it rest.
Well, as for the new result: Bayesian reasoning is that we now have a new situation. Originally we did not have any search results and only had the opinion that we knew that there was a hot spot (original prior). That area (and more) has been searched. (I understand that it is perhaps only about 90% probable that we have eliminated that area).
Your new analysis differs from the original analysis by the IG. For the purposes of discussion, let me presume that you will make a persuasive case that you are correct (even though some of that area would also have been unsuccessfully searched.) So, we have more information and “experimental” results to consider in estimating the probable location of the aircraft. (the new prior)
Previously, the possibility of a glide for any substantial distance was discounted as low probability and so an area in which the plane could have crashed was not searched. What does our additional knowledge suggest? How important is the new knowledge in prioritizing and defining the search program.
@sid
“I thought we settled the BFO question some time ago. (except for DennisW, although I would like to get his support for the result)”
Settling something versus disregarding something I cannot explain are two entirely different things.
My inquiries regarding station-keeping operations are continuing….
@Sid Bennett: I’m not sure you understand what I said about the BFO calculation. The “three methods” are the same. They use the same underlying data (the pilot frequency error), and produce essentially identical results.
As for how we incorporate the “search results priors”, I won’t get ahead of the paper, other than to say we’ve tried to incorporate elements from the surface and subsea search, as well as drift model data.
@Sid Bennett: Station-keeping maneuvers will only introduce BFO errors if Inmarsat and the DSTG used incorrect position and velocity data in their calculations. I seriously doubt this occurred, as Inmarsat measures satellite position to a very high accuracy.
@sk999
Thanks for sharing the interesting analysis (Jan 3rd). I’m trying to understand your approach. Some first questions:
– Could you explain more in detail your fuel consumption model, as well as how you deal with wind and temperature effects (as a function of position and FL)
– Could you please explain the “BFO/UT” cross correlation in more detail
– Could you perhaps share the details (plots incl. the virtual “arcs”?) of the flight paths and BTO / BFO values at the arc crossings regarding your example where you state:
“The ability of the BFOs and BTOs to discriminate among various routes is limited. As an example Figure 1 shows the results of a simulation where an LNAV constant Mach route terminating at latitude -32 was used to generate a set of predicted BTO and BFO values, then a magnetic track MRC route terminating at latitude -35 was used to generate a set of “measured” BTO and BFO values. The BFO offset was allowed to float freely. The rms difference in BTO values is 9 microsec, and the rms difference in BFO values is 2.1 hz”
Sid Bennett,
According to https://www.eumetsat.int/website/home/Satellites/LaunchesandOrbits/SatelliteOrbits/Satellitemanoeuvres/index.html station-keeping burns for longitude occur every few months (depending on location). So there should not have been a maneuver on March 2.
Niels,
Thanks for reading my report. Some answers to your questions.
1. I assumed fuel burn rate is a power-law function of the mass: FBR = mass^alpha. The exponent alpha is a function of mach and altitude, and I created functions to fit Boeing’s performance table. For weather data, I do linear interpolation in time, altitude, latitude, and longitude, same as everyone else.
2. BFO/UT correlation was explained in my 2016 report. It’s pretty simple – just find a website that explains how a Spearman correlation tests works, then plug in the BFOs and UTs as the two sets of data.
3. I added a new Figure 2 to the report that compares the two routes.
@sk999
Thanks for the additional reference. I have lots. But many of them suggest that many small burns are made for control of longitude. The ones for controlling the NS wander are more costly and are infrequent.
Let’s see if anyone has a source of actual info. We once had some satellite gurus participating in the discussion.
Sid Bennett,
First of all, the “outlier BFOs” in Fig 5.4 do not have the signature of a fuel burn. The signature would be a jump in the BFO and then a pair of oscillations, one of period 12 hours, the other of period 24 hours. No return to the previous BFO bias value.
Second, waiting for “actual info” is like waiting for Godot. Why do you ask?
Third, if Inmarsat utilizes many small burns, each one will be small, and their effect on the BFO can be calculated from first principles. If the burns are every four days (as you imply), the impact on the BFO is of order 0.4 hz.
Time to move on.
@sk999
Thanks a lot for clarifying. I like the new figure 2: food for thought
Initial PS752 Report is out, available here: http://bit.ly/2FAccTj
From CBS News:
US officials are confident Ukrainian Flt 752 was shot down by Iran. US intelligence picked up signals of the radar being turned on & satellite detected infrared blips of 2 missile launches, probably SA-15s, followed shortly by another infrared blip of an explosion.
The ‘Bellingcat’ group documented the process of locating the vantage point for a video clip believed to show the missile detonation near to the Ukraine International Airlines 737.
Subsequent to the missile detonation the aircraft turned in an apparent attempt to return to Tehran International Airport before impacting the ground some 16km distant from the missile detonation.
@Andrew. I expect that Boeing will have reviewed the final ACARS engine take-off and climb reports, (SIR App 1.6B). Still I find there are data, for pack flow rates particularly, that are puzzling; at least from the limited manuals I can access.
Hence I am looking for confirmation that there was nothing amiss with the pressurisation system.
At take-off where FCOM indicates the packs normally would be selected off the reported pack flow (‘PKFR’) totalled 136 lb/min (I assume they mean ../min, not ../sec).
Of greater interest, at the 22,278 ft. altitude of the climb report the pack flow rates total 435 lb/min. As I understand it from the Training Manual, for the 777-200 the cabin altitude for a 35,000 ft cruise would rise progressively to 5,370 ft, set by the 8.6 psi cabin to ambient differential limit. Supposing cabin altitude rose linearly, the pack flow rate at that altitude (TM 21-51-00 p37, Schedule 1 minimum, top graph) would be 288 lb/min, were this indeed the schedule in MH370.
According to the AMM for the -300 that model can have two different outflow valves of different part number and weights. They are interchangeable so maybe a more recent model could be fitted to the -200. However that should not alter schedules.
Are you aware of a ready explanation please?
Possibly related I see also that the ‘Environmental control bleed flow rate’ (‘EBFR’) total at take-off is 318 lb/min (again listed as lb/sec) and in the climb 317, though with the right to left pack distribution changed. At first glance I thought this might be the combined recirculation rate but it is exceeded by the pack rate in the climb so that cannot be.
Also possibly related, from my reading duct pressure (‘DP’) should be about 50 psi though here ASCS duct pressure is in the 80’s at take-off, packs nominally operating as above, though back in the fifties in the climb.
@Victor. MH370. Some thoughts about decompression sickness risks below: https://www.dropbox.com/s/jubcj5gc2yvelse/Pilot%20Decompression%20Sickness%20in%20MH370.docx?dl=0
@David
Here’s an online tool for calculating depressurization rate:
https://www.tlv.com/global/TI/calculator/air-flow-rate-through-orifice.html
According to a post on Airliners.net-
“On the B777 there are two outflow valves, with each a maximum flow area of about 90 square inches.”
Assuming the 45000-ft3 aircraft vol (needs a check), and 6000-ft cabin altitude, that’s approx. 0.8 atm, so that says we have 36,000 SCF air inventory at altitude. Quick calc with the tool (needs a check) I got initial flow rate of about 8000-SCF/min. The air flow rate would of course decrease with time (we’d have to do some iterations). But I am thinking this is relatively fast.
@Andrew. 6th line from the bottom, for, ” …though the right to left pack distribution…” should read, “….though the right to left distribution….”
@TBill. Thank you but I am hoping that the simulator data is realistic. If it is, it should incorporate other variables than pressure differential, area, temperature and specific heat ratio. These would include such as the suction from the rectangular outflow valve opening (like an oyster opening, down wind) and into airflow that will include boundary layers, and further out, free flow. The duct area would include the triangular gaps at the sides, all openings doubtless having reinforcing projections. Besides the airflow would need to be turned about perpendicularly.
Also, when at your reference they provide data on flow straight through an orifice I might have missed it but they do not define what shape the orifice is, sharp edged, rounded or a venturi for flow measurement.
It would be nice to have level D simulator results since they would be based on demonstrable data but I doubt they will be available readily.
@Victor Ianello @Richard @DrB The wait for the third post in this series is killing me! It reminds me of the wait for The Godfather Part III…
@David
RE: “At take-off where FCOM indicates the packs normally would be selected off the reported pack flow (‘PKFR’) totalled 136 lb/min (I assume they mean ../min, not ../sec).”
The packs are normally selected to AUTO for take-off, unless additional thrust is required to satisfy the take-off performance requirements, in which case they would be selected OFF. Packs off operation would not have been required for MH370’s departure from KUL. With the packs in AUTO, the ASCPC commands schedule 4 for two minutes during take-off, which, at sea-level, is very close to the total pack flow recorded in the take-off report.
RE: “Of greater interest, at the 22,278 ft. altitude of the climb report the pack flow rates total 435 lb/min.”
The total pack flow does seem very high. I can’t explain why that would be the case.
@Rob Moss: Interesting comparison to GF3. Here, we know the ending. What’s taking some time is completing the material. Trust me, the end is in sight.
@Rob/Victor
Wikipedia cut-paste below from “Godfather Part III” regarding Francis Ford Coppola, director and producer.
Coppola felt that the first two films had told the complete Corleone saga. Coppola intended Part III to be an epilogue to the first two films. In his audio commentary for Part II, he stated that only a dire financial situation caused by the failure of “One from the Heart” (1982) compelled him to take up Paramount’s long-standing offer to make a third installment
I think your metaphor will turn out to be clairvoyant. 🙂
@Andrew. Thank you re take off.
Re in the climb, “The total pack flow does seem very high. I can’t explain why that would be the case.. ” Hmmmm.
@Victor. The last paragraph of my Dropbox URL describing an incidental mass and buoyancy change at altitude needed correction but being a distraction I have deleted it.
@TBill. Also, what to me is not obvious is how at low level the outflow valves are able to discharge about 320 lb/min of pack air supply when differential pressure, cabin less ambient, is very little.
@David
That would require about 0.5 psia higher (eg; 15.3 vs. 14.7) according to the calc tool above. I am using 7.5-inch diameter to approximate the area of the two outflow valves. I would ask if the 320 lbs/min is “uncorrected indicated flow” or actual lbs.
Strikes me the other weight loss is the air/fuel vapor escaping from the fuel tanks as the aircraft ascends. I wanted to estimate fuel vapor loss amount, but did not get to it yet.
@TBill. The “about 320” lbs/min is that scheduled. As to the achieved, there is conversion from the (fixed) volumetric flow rate to that mass flow. How accurately the system monitors and adjusts that for cabin altitude excursions and changes to heat/cooling delivery I do not know.
What “discharge coefficient” do you apply to the orifice and how do you select that please?
One other facet is that FCOM paraphrased says that ‘full automatic operation’ of cabin altitude is possible with one outflow valve operating automatically and the other not operating.
I assume they assume the inoperative would be set to 50% open, its default in a failure mode. That leaves one and a half valves delivering maximum flow at minimum cabin-to-ambient differential.
The 320 lb/min is limited by the seats:other models and layouts might have more. Also, on deselection or failure of any or all of the 4 ventilation fans, flow rate increases by 67 lbs/min per fan to maintain the ventilation. If ‘full automatic operation’ includes this contingency the operative valve’s capacity would be challenged further.
Offsetting all this a little, pressurised compartment leakage will reduce outflow somewhat. The limit of that will be specified in ground pressure testing but I do not know what it is.
I had not included weight change from vapour loss.
Vapour pressure, so that loss, is less in Jet A1 fuel but I notice from SIR Appendix 1.6B that the fuel temperature was 30˚C at take-off and remained that 10 mins later at 22,000 ft so it does not cool quickly.
@David
RE: MH370 EHM climb report
The only thing I can think of that would increase the pack flow rate above the Schedule 1 rate is a RECIRC FANS switch selected OFF, which would increase the total pack flow rate by 134 lb/min. The fans are normally selected ON, but if the APU is in use while on the ground in humid conditions, pilots sometimes select the fans OFF to increase the flow of air through the cabin and reduce the formation of condensation and mist. I’m clutching at straws, but perhaps the RECIRC FAN switches were selected OFF on the ground and one of them remained in that state during the climb out of KUL. If that were the case, the expected pack flow rate would be about 414 lb/min, which is only about 5% less than that recorded.
@Andrew. Sounds plausible to me. Possibly there was the just the switch selected off and forgotten about. (To clarify for others re my 69lbs/fan above to @TBill, each of 2 switches selects two fans).
In that case there can be at least three interpretations. One, it adds evidence that someone had his mind enough on the job enough to be alert to the humidity and counter that; two, that someone had his mind elsewhere in forgetting to turn it off; or three that this was just one of those things that get overlooked from time to time and nothing much should be inferred from it.
From that ambiguity I think we could put it aside at least for now. It is not as though this could be construed as evidence that there was a massive leak, the outflow valves were jammed open or had been manually opened since I do not think that inflow would increase to that extent.
However I do note that power for the left lower and forward upper fans comes from the left main bus, the other two being powered by the right, suggesting another possibility. Were a bus tie open and an IDG selected off that could explain the loss of the two fans.
There would be implications for equipment power supplies and cooling eg the left main bus provides power to cool IFE equipment.
Second line. 67 lbs/min vice 69.
Another go. 1st line……Possibly there was just the ONE switch selected off and forgotten about. (To clarify for others re my 67 lbs/min PER FAN above to @TBill, each…….)
NY Times:
Iran Says It Unintentionally Shot Down Ukrainian Airliner
@David, @Andrew, @TBill,
1. MH371 T/O was at 01:34:15 UTC.
The T/O Report was at 01:34:51 UTC, just 36 seconds later:
Altitude 204 feet.
Pack Flow Schedule 4 in force for 2 minutes after T/O.
Pack Flow 63.9 lbs/min Left, 76.1 lbs/min Right, Total 140.0 lbs/min.
Outside Temperature 1.8°C.
All Fans ON.
The CLIMB Report was at 01:46:47 UTC, 12 minutes 32 seconds later:
Altitude 20,468 feet.
Pack Flow Schedule 1.
Pack Flow 155.2 lbs/min Left, 156.3 lbs/min Right, Total 311.5 lbs/min.
All Fans ON.
2. MH370 T/O was at 16:41:57 UTC.
The T/O Report was at 16:42:21 UTC, just 24 seconds later:
Altitude 344 feet.
Pack Flow Schedule 4 in force for 2 minutes after T/O.
Pack Flow 69.7 lbs/min Left, 66.8 lbs/min Right, Total 136.5 lbs/min.
Outside Temperature 27.3°C.
2 out of 4 Fans OFF, but Schedule 4 is unaffected.
The CLIMB Report was at 16:46:47 UTC, 12 minutes 32 seconds later:
Altitude 22,278 feet.
Pack Flow Schedule 1.
Pack Flow 217.6 lbs/min Left, 217.5 lbs/min Right, Total 435.1 lbs/min.
2 out of 4 Fans OFF, but Schedule 1 is affected by an increase of 33.5 lbs/min/pack.
Equivalent All Fans ON Pack Flow 150.6 lbs/min Left, 150.5 lbs/min Right, Total 301.1 lbs/min.
9M-MRO had 282 passenger seats. MH370 was carrying 227 passengers (80.5% loading). MH371 passenger load is not known.
This is less than the maximum of 440 seats and still less than the minimum of 348 seats assumed in the Boeing Training Manual for Pack Flow Schedule 1.
The difference between MH371 and MH370 is that 2 out of 4 fans were switched off, probably because the cabin air was acclimatised in Kuala Lumpur to a higher outside temperature and humidity.
Taking into account, that 2 out of 4 Fans were switched OFF on MH370 at the start of the flight, then the Pack Flow Schedule chart linked below aligns well, given that the chart shows the total air flow for two packs.
https://www.dropbox.com/s/ljjylcjq47evo67/Pack%20Flow%20Schedule.png?dl=0
@David
I am sticking with the 0.7 discharge coefficient provided as the base case.
According to a Airliners.net post:
“On the B777 there are two outflow valves, with each a maximum flow area of about 90 square inches.
During normal operation, the size of the opening varies depending on the amount of air flowing into the cabin and the required cabin pressure. On the B777 the forward outflow valve is usually further closed than the aft valve, to allow for most optimal flow through the cabin. In a normal cruise condition the forward valve on the 777 is about 7 degrees open and the aft valve around 30 degrees.
In case an outflow valve is ever fully closed in flight (due to a system error, or manually by the crew), there are separate safety valves that will blow off extra pressure to prevent any damage to the fuselage. Typically these safety valves start opening when the pressure inside the cabin is about 8.8 PSI higher than the pressure outside”
I do not know if the above is true for all B777 versions.
@David
PS- Am I hearing 3-5 minutes to repressure the aircraft using bleed air? I was wondering if the pilot dipped altitude to repressure, but if it is fast with extra bleed air, that tends to say altitude drop is not so big deal.
@Richard. Thank you for the comparison.
I assume that had the cause been main bus depowering there would have been other evidence of that.
FCOM 2.20.3 says that fuel consumption increases 0.7% for each fan switch off.
Presumably there would have been notification about the switch to the crew already. Either way, had it remained that way with packs operating, would your report be sensitive to that?
@David
We do consider the possibility of the Packs and Recirculation Fans being selected ON or OFF in our latest paper.
Both are operated from the cockpit overhead panel P5. The switches include colour coded status indication as feedback.
As you point out, Packs and Recirculation Fans status has consequences for the fuel flow rate.
@TBill. Re the outflow valves’ openings, the flow split is described as normally about 20% forward, 80% aft. Your quote’s 7˚ & 30˚ in normal cruise is consistent with that, supposing discharge is about proportional to angle. Thanks for those figures. Hard to come by: the maximum angle they open to is unclear still.
The ‘about 8.8 psi’ differential for pressure relief is about right. The Positive Pressure Relief Valves open at 8.95 psi.
Regarding re-pressurising, @Victor’s simulator did that at 1,300 fpm. If the cabin were depressurised to 25,000 ft, depending on the time there with outflow valves now closed but leakage continuing, to re-pressurise to say 11,000 ft would take around 12 minutes, depending on the simulator accuracy. (In my recent post about decompression sickness I misquoted Victor’s 1,300 fpm as 13,000 and have now corrected for that)
Victor may comment otherwise but I believe that 1,300 fpm was independent of both cabin and ambient altitude.
@Richard. “We do consider the possibility of the Packs and Recirculation Fans being selected ON or OFF in our latest paper.”
Thank you.
@David
RE: “Presumably there would have been notification about the switch to the crew already.”
if one or more RECIRC FANS switches were selected OFF, the crew would have been alerted by an EICAS memo message ‘RECIRC FANS OFF’ on the upper EICAS and possibly a status message on the lower EICAS.
@Andrew. So continuing like that most likely would have been deliberate, or attention was entirely elsewhere.
Since I can see no purpose to continuing deliberately, to me either it was inattentiveness (occupied elsewhere?) or main-bus related.
The SDU was working still so it couldn’t have been that side, at that stage.
Most likely inattentiveness do you think? If so more likely than not that there was just the one in the cockpit?
@David
RE: “Most likely inattentiveness do you think?”
Possibly. People miss the strangest things when they’re busy and/or tired. They had a very short taxi from the parking gate (C1) to the runway (32R, holding point A10), so they would have been busy.
RE: “If so more likely than not that there was just the one in the cockpit?”
I doubt that was the case during the climb. In the absence of an EHM cruise report, we don’t know if the pack flow rate reduced to the more typical Schedule 1 value some time after the climb report was generated.
@Andrew. Thank you.
@Andrew
Re: busy on the runway
I would say MH370 Scheduled gate departure was 12:35AM but they departed gate early at 12:27AM for 12:42AM wheels up, which should leave some time to adjust settings? Of course ZS was on his cell phone logging into WeChat at 12:40AM, so there was that distraction.
@TBill
It sounds like a long time, but there’s quite a lot to happening between push back and line-up. If you break it down further, the ATC communications logs show that MH370 read back their pushback/start approval at 0027:32 MYT and subsequently read back their taxi clearance at 0032:37 MYT. They were then cleared to line-up at 1638:43, about six minutes after they commenced taxi. They certainly would have been busy completing all the required checks during that six minute period (flight control check, final briefing, confirming the cabin is ready, before take-off checklist, etc) as well as communicating with ATC and monitoring the aircraft’s progress as they taxied towards the runway. My employer uses the gate next to C1 at KUL and I have departed from there for take-off on 32R on many occasions. Trust me, it’s busy!
I think it’s plausible that one of the RECIRC FANS switches was unintentionally left in the OFF position, but it might well have been deliberate. Perhaps they briefed they would select it ON during the climb after take-off. I’m only guessing – I obviously wasn’t there!
@sk999
Some additional questions regarding your recent paper:
In fig. 3 the BFO offset is constraint. Do I understand correctly that there you assume some distribution around zero mean (based on approx. 150 Hz bias) for the offset (which will be constant for each path?), and on top of that you account for 2.8 Hz RMS for random BFO error contributions? Perhaps you can clarify a bit more.
In fig. 4: the offset (constant for each path?) can be chosen without constraint?
regarding the results: which probability fraction would you cover in fig. 4 if you would consider the latitude interval S31 – S35.5?
@Andrew. Thanks for giving us a feel for the situation.
Would the EICAS memo and/or status message persist? If so, since this EHR was over 10 minutes and 22,000 ft after take-off, wouldn’t that make it less likely that the switch was just overlooked or not got around to?
Niels,
I think you described my treatment of the bias offset correctly. The BFO bias offset is allowed to vary, but is constrained. Effectively, it is as if I had made one “observation” of the offset directly, and the value was the same as that at the gate, with an rms error of that “observation” set to some value. For Figure 3, the rms was taken to be 1 hz. For Figure 4, the rms was actually 20 hz (same as what the DSTG used), which effectively means that the bias offset is unconstrained a priori, and thus, in the least squares, posterior value is the mean of the actual BFO measurements.
After more consideration of the data that we have in hand, I think one can make a case that the rms of the bias offset prior should be somewhere between 2.3 and 2.8 hz. I have recently generated a set of models for the 2.3 hz case (wiping out the files that went into Fig 4.) However, from the figure, it is apparent that about 89% of the probability was in Lat S31 to S35.5. In the new run it is 85%.
@David
RE: “Would the EICAS memo and/or status message persist?”
Yes – an EICAS memo RECIRC FANS OFF would be displayed in the memo area of the upper EICAS as long as one or more fan switches were selected off. The memo area is used to display reminders of the selected state of some systems or controls, eg APU RUNNING, AUTOBRAKE RTO, PASS SIGNS ON.
A status message, if it existed (I’m not sure if a message would be displayed in this case, given the EICAS memo), would also persist on the status page as long as one or more recirc fans were not operating. However, the status page isn’t always displayed on the lower EICAS; it must be selected by the crew. The status page is checked during the pilots’ initial setup to confirm the aircraft’s dispatch capability and is not checked again unless a STATUS cue is displayed on the upper EICAS to indicate a new status message. The STATUS cue is inhibited from the beginning of engine start until 30 minutes after take-off.
RE: “If so, since this EHR was over 10 minutes and 22,000 ft after take-off, wouldn’t that make it less likely that the switch was just overlooked or not got around to?”
Quite possibly, but pilots sometimes miss things if they are distracted by something at an inopportune time. In my role as a check captain sitting on the jumpseat, I have occasionally seen crews forget to shut down the APU after engine start because they were distracted by some event or other at precisely the time they would normally shut it down. In some cases that condition persisted for quite some time, even though an APU RUNNING message was clearly displayed on the upper EICAS. As I said earlier, a RECIRC FANS switch might have been left off deliberately, but it might also have been inadvertent. I can’t say which case is the more likely.
@Andrew. Understood thanks.
@sk999
Thank you!
@all
I found some interesting links explaining/illustrating the technology used on the “GO Phoenix” (S32.8 – S35 near the 7th arc)
https://www.hydrospheric.com/the-work.html
http://www.slhydrospheric.com/PS60_whitepaper.pdf
Somehow the “end of contract report” (appendix E in the ATSB Oct 2017 report) supplied by Phoenix International Holdings focuses on the 2016 effort (on board Dong Hai Jiu 101).
Does anyone know if there is a detailed report available about the 2014/2015 SAS scan effort (Phoenix/Hydrospheric)?
@Niels wrote “Somehow the “end of contract report” (appendix E in the ATSB Oct 2017 report) supplied by Phoenix International Holdings focuses on the 2016 effort (on board Dong Hai Jiu 101).”
I’ll suggest that is because ATSB’s report details the Phoenix deployment on DHJ-101 while contracted by ATSB.
The Phoenix International-SLH deployment on offshore support vessel Go Phoenix was contracted by Malaysian parties including Petronas and DRB-HICOM Defence Technologies Sdn Bhd (DEFTECH).
I have not found a detailed report for the deployment onboard Go Phoenix.
@Don Thompson
Thanks, Don, I was thinking in similar direction. It would be quite crucial to have such report shared, as many consider it a key area for the search. I anyway intended to contact some Malaysian parties, I can ask.
@Niels/sk999
Bias offset is basically a random walk.
From Wiki below:
“An unbiased random walk is non-ergodic. Its expectation value is zero at all times, whereas its time average is a random variable with divergent variance.”
It is very wrong to talk about RMS statistics relative to a single random walk. Perhaps forgivable for an ensemble of such walks.
@Richard. Do you know of the timing of the MH371 cruise EHM report please? Shortly after reaching cruise?
@David
The MH371 cruise EHM report was sent at 07:02:58 UTC just after leaving cruise altitude.
@DennisW
I think it is better to assume some arbitrary constant offset after 19:41 than not to, in order to at least account for possible offset occuring between the time for which the 150 Hz bias was determined and the start of the analysis interval. Is that a crude “model”? Yes of course it is. Should you constrain the offset through some statistic? With the limited and contradictive data we have in hand: Better not, agreed.
You said “Bias offset is basically a random walk”
How do you know this? I actually would expect it to be more like a biased random walk. Do you know of experimental data supporting your statement for a typical reference oscillator?
@Niels
You are showing your ignorance of oscillator physics by asking such a question. Sadly, you are not alone on this site. All oscillators – quartz, rubidium, cesium, hydrogen maser,… exhibit a random walk frequency instability. The difference is over what measurement interval. Random walk begins at approximately 100 seconds for quartz, approximately 10^4 seconds for rubidium, and some 10^6 seconds for cesium (see graph linked below).
No knowledgeable person uses a standard mean and variance to characterize oscillator performance. The Allan variance (two sample variance) is always used since it does not require the calculation of a sample mean (which is meaningless for oscillator measurements).
https://photos.app.goo.gl/JYPEBECGnW5iFfXD6
@DennisW
I don’t understand why you project your frustration on me, because I don’t think I ever used “standard mean and variance to characterize oscillator performance”. I’m aware of Allan variance; my question basically was why and if always in practice the Allan variance would increase linear with tau. Your idealized graph seems to suggest so (after some offset); I’m just curious to know why, intuitively I would expect this linear regime to stop somewhere.
@Niels
The variance of a random walk increases linearly with time. It has nothing to do with intuition.
I do not mean to take out my frustration on you. I am, however, very frustrated. Probably overdue for me to move on.
@DennisW
Yes I get that. I’ve done a series of random walk simulations to confirm it in the past. Actually, how typical is the graph you shared? It shows for the OCXO a fractional frequency instability of about 10-9 for a day.
@Niels
I have no information relative to the Allan Variance of the AES oscillator. There is quite a large variation among the oscillators in a given “class”. Care needs to be exercised in interpreting the Allan Variance in terms of an observed frequency change. The link below is probably a better illustration of the variation. I could not find it earlier.
https://photos.app.goo.gl/7ddDFh48oLmQPRSZ8
@Richard. Thanks for clearing up the cruise EHM transmission timing.
@DennisW
Thanks for sharing the graph; would you have the ref to the paper?
@Niels
Link to pdf (I think). Will test it after I post.
https://pdfs.semanticscholar.org/733b/be22f6762408770ca5670781496d6e20b207.pdf?_ga=2.70074192.1710046244.1579017539-482692765.1579017539
DennisW & Niels,
The figure and article both show that the Allan Variance for an OCXO as reported there is too small to matter. This suggests that the actual drifts in the BFO bias that are seen, based on the limited data we have, are due to other causes such as thermal environment, vibration, who knows, that will have their own properties. The best way to characterize the bias errors is from the data themselves. In any case, that is the approach that I have taken.
@sk999
Determining the drift magnitude from the Allan Variance is tricky. I will try to write something up on it in before the end of the week.
@bias group
Have you ever used a radio? The frequency of the signal is quite stable after warm up and long term drift is negligible. Otherwise modern radios wouldn’t work. They didn’t work very well 80 years ago 🙂
The only oscillator that is not closely temperature controlled is the translation oscillator in the satellite.
My first order computation is that the temperature of the translation oscillator would have to have changed by 40degC to explain the anomaly in the BFO data in fig 5.4 of the DSTG report. This is twice the change that can be attributed to an eclipse.
The error is not “statistical”. That is, it is not due to a random process.
Sid Beennett,
You ask, “Have you ever used a radio?”
WA2EJM here. I ussed to build crystal oscillator controlled radios. Even designed oscillator circuits. I cannot say that any of it was of imemdiate application to the problem at hand. But it was useful to provide general background information.
As VictorI has previously stated (and if he had not, I would have done so), the temperature drift of the satellite oscillator due to the “eclipse effect” is completely irrelevant. It is all measured by the pilot signal, for which we have complete information.
One has to remember – it took Inmarsat 3 months to figure out how its own communications network worked. The JON article describes the eclipse effect (and other effects) in great detail because that is what occupied the attention of Ashton and others during that time. They came up with the “eclipse” model, which was one of the factors leading to the failed Ocean Shield search. In the end, that model was dumped, and Inmarsat came up with the “unified” model, which is more or less what we use today.
@sk999
+1.
@DennisW
Thanks for sharing the link!
As the focus is on timing, I suppose that the “50 ns time” in table 3 is based on the summation of the deviations in period time.
@sk999
K1AW here. (I designed fiber optic gyros and was chair of the standards committee for a decade.) There are many good papers on the subject of Allan variance that are found with a simple Google search.
Where is this “unified” model of the BFO bias documented?
Can you publish the pilot signal data for the case described in DSTG fig 5.4? Or, do you merely assert that it exists.
Are you asserting that there is no residual eclipse effect?
Victor agreed with me that the sinusoidal model with the temperature correction yields equivalent results to other models. And what is your explanation of the underlying residual diurnal variation other than that previously described by Victor et al?
I believe that the graph referred to yesterday is actually the Allan deviation, which is the sq rt of the Allan Variance.
There are two camps here. The first uses the mass of data in a statistical sense, without attempting to separate out any possible deterministic effects and results in a large equivalent variance. The second eliminates those known deterministic effects and has a small variance.
Apparently this comes down to a question of belief.
The master oscillator in the transponder will drift OTOO 10 kHz over the life of the satellite. There is a repeating diurnal offset OTOO 10’s of Hz. There is an eclipse effect OTOO 10 Hz. NONE of that matters because all of these offsets are 100% cancelled by the observation of the pilot carrier(s) that pass through the same transponder. So, there is zero (unknown) offset from any transponder oscillator changes. All old news, but…
@sk999
I appreciate the history lesson, but can you say why the earlier “eclipse” model was one of the factors leading to the failed Ocean Shield search? (Was the orig BFO too low?). And, what was the time frame that they abandoned that eclipse model for the unified model?
@ALSM
Good info but the BFO bias has to be calibrated every so often, right? In particular before the MH370 flight, I am thinking. Can you put that in perspective?
My point was that the transponder master oscillator can be allowed to drift because its offset is constantly monitored and compensated automatically by the GES pilot tracking system. SOP for all DAMA/FDMA mobile satellite systems. Therefore, it is not a source of short or long term BFO bias change.
BFO bias change can only result from OCXO frequency change. The short term drift (seconds to minutes) is virtually zero, but it can drift a few Hz over a day, which is why the AES goes through a calibration cycle approximately once a day (min time between calibrations is 26 hrs). During these calibration events, the offset is effectively calibrated and the synthesizer is adjusted to keep the offset to <8Hz. More often than not, no adjustment is needed. But when the offset is measured to be more than 8 Hz, the SDU adjusts the offset to be within 8 Hz. I've been advised by people that should know, it is very rare to see the offset adjustment move more than one LSB (16 Hz). Typically, the adjustments over a few weeks average to zero. IOW…this periodic re calibration is intended to zero out long term drift (over many years), not short term variations of a few Hz over the course of a day.
@Sid Bennett: AJ4AQ here, although my HF experience base, including SDR, is not relevant to understanding the BFO’s fixed frequency bias (FFB).
Where is this “unified” model of the BFO bias documented?
Appendix C of the ATSB’s final report, “The Operational Search for MH370”, is the best chronological summary of the development of the BFO model.
Are you asserting that there is no residual eclipse effect?
Unless Inmarsat made a big mistake, that’s correct.
At Perth, the pilot frequency error and the EAFC compensation are measured and recorded. The C-band and L-band Doppler shifts for the pilot can be calculated from the satellite orbit. That gives you everything you need to separate out the satellite frequency shift. In the ATSB report from June 2014, the data was presented in table in the format of EAFC + satellite translation. In the Inmarsat JON paper, that same data was presented in graphical form in the format of C-band Doppler + EAFC + satellite translation. We have to assume that same information is available for all the test flights, and the same BFO calculations can be accurately performed which properly includes the effect of the eclipse.
Forgot to add…K5KBK and W0ICH (inactive now). Built a lot of gear from scratch and kits back in the 60’s. Who remembers razor blade detectors?
@Niels
you said:
As the focus is on timing, I suppose that the “50 ns time” in table 3 is based on the summation of the deviations in period time.
The last row in Table 3 is a bit funky IMO, and simply estimates about how long it would take to accumulate 50ns of time error given the aging rate in the table for the various oscillator types.
My estimate of AES drift given a high quality OCXO frequency reference is linked below. Nothing surprising bsed on many previous discussions.
https://docs.google.com/document/d/1TsjYnj95d09DJ2aO5mRiXQQ0x6GoyrqOQU_T98vl4gI/edit?usp=sharing
Don’t forget to scratch the “Cat’s whisker” !
Formerly – ZL2TSH
Hell’s bells! What are we doing on the internet? Sounds like we should be having a call in on HF 🙂
In the interest of full disclosure, I am ex-WA2 and thus no longer on HF Need to stay on the internet.
DennisW,
As Sid Bennett correctly pointed out, the figure you linked to is actually the Allan Deviation (in spite of the axis labels), so your calculation needs to be redone.
The history of how Inmarsat’s BFO calculation evolved over time has been covered here before and is presented in the ATSB final report of Oct 2017. A short note hinting at the different models was first given in the 8 Oct 2014 ATSB Update. It was actually the first model (OAMS) that was used to define the Ocean Shield search zone, and it had an error of ~12 hz, which pushed the final latitude considerably North. (Other considerations, such as the infamous NW point and an obsession with waypoints and airways, contributed as well.) The eclipse model was developed next, and the Unified model was finally adopted at the end of July, 2014.
Sid Bennett –
I do not have the pilot signal data for March 2. We do not have most of the data analyzed by the DSTG. We do not even have a sample calculation. There is no way to verify that the Fig 5.4 excursion in BFO residuals is actually in the data and not in the DSTG calculation. Unfortunately in the Search business (not limited to MH370), there is a general principle at work – they do not like to share.
@all,
Formerly WN5HCV here. As a teenager in the 60’s, I lbuilt a crystal-controlled 4W 80 m CW transmitter. Receiver was WWII BC-348. Those were the days!
@sk999
Nice catch. I am pretty sure you are right. Will check the source more carefully before I do anything.
@sk999 wrote:-
“There is no way to verify that the Fig 5.4 excursion in BFO residuals is actually in the data and not in the DSTG calculation.”
The DTSG’s cop-out remark regarding a ‘geographical dependency’ has always bothered me. So, I’ve been back and had a look at earth.nullschool 250hPa graphic for 2014-03-03 @ 0000UTC, and found that the subject aircraft flew into and out of a distinct low pressure system over the southern Andaman Sea. With the oceanic QNH set to 1013.25hPa, the aircraft’s geo-height changed slowly as it descended then ascended through this area.
My suspicion is that the BFO drift or so-called OCXO “random walk” is more likely associated the above event.
@Barry
sk999 is right about the DSTG calculation, but I would assume that it was highly automated (or they had access to lot of grad students) given that they checked 20 some flights. I tend to believe it happened and was validated.
Looking very briefly at the sigma versus sigma^2 difference pointed out by sk999, it would amount to a bias drift of 3-4Hz versus 5-6Hz over the flight time. Not huge difference by any means, but definitely trending toward a lower estimate of bias drift. Something unexplained definitely happened on the Figure 5.4 flight.
@all the hams flushed out of the woodwork… I still have my call, but do not participate much. Its a time gone by…Nice to know we share some history.
@BarryC, The duration of the event is quite long and the change in barometric height is probably less than several thousand fee (note: this is a SWAG). The size of the anomaly appears to be unique and constitutes the outlier data in the next figure.
@sk999, There are aspects of he DSTG report that may be incorrect in light of later-obtained knowledge and analysis, so I can only admire the volume of work and collaboration that must have occurred and the willingness to give a chronology. That said, one wishes that the various reports that are mentioned in appendix C were available for the insight they would give. I had not realized some implications of the crude first model. It was not public at a time when it was relevant.
Amateur radio (and model airplanes) was my passion in the 60’s. It motivated me to enroll in the CU EE program which ultimately led me to start 3 satellite communications related companies, including AMSC (American Mobile Satellite Corp) in 1985. 10/15/20m DX antennas: http://bit.ly/2QUOLdQ
@Sid Bennett wrote:-
“The duration of the event is quite long and the change in barometric height is probably less than several thousand fee (note: this is a SWAG). The size of the anomaly appears to be unique and constitutes the outlier data in the next figure.”
I must admit I wrote the piece up without too much thought, and it occurred to me not long after, that I had the whole concept ‘reversed’. That is the aircraft proceeded into a High pressure system and ascended on the Oceanic standard QNH then descended. The random walk was an increase to the BFO followed by a decrease. The reversed bit happened due to me looking at the earth.nullschool graphic and not realizing that the Andaman Sea position was about 8°N. That happens when you’re too long accustomed to looking at Southern Hemisphere weather charts.
Likewise, you’d have to look carefully at the increase to the BFO frequency to see if its increase related to the aircraft’s vertical movement toward the 3F1 satellite. We’re probably no closer to determining what the DSTG’s geographic dependency is.
@Barry
Likewise, you’d have to look carefully at the increase to the BFO frequency to see if its increase related to the aircraft’s vertical movement toward the 3F1 satellite.
Probably not. The DSTG had lat,lon, and alt info for the flight.
And another one . . . . ex ZL2TIA
Built all my own gear from scratch, all solid state, 2M, 70cm and 1296, in the mid 60’s.
@Victor
The popular “Stuff You Should Know” podcast has covered MH370 this month. Nothing new technically (basically giving account of MH370 per Langewieshe/The Atlantic). But this show is apparently a widely listened podcast, so presumably getting significant coverage. IG mentioned as very helpful group.
Episode menu link (see Parts I and II)-
https://t.co/cXzGSHL50a?amp=1
@Andrew.Might be of interest:
https://www.seattletimes.com/business/boeing-aerospace/boeing-pilot-union-decertification-vote-postponed-as-speea-files-charge/
@TBill
Podcasting, in general, has become very popular but SYSK demonstrates sloppy script development and production. The presenters’ narration, below, is a misrepresentation of how the complete “Stratos Log” was provided to family members before being passed to the IG. Such a misrepresentation may have repercussions for those family members involved.
“They made friends with some of the family of MH370, just by the families hearing about what they were doing […] they got the raw Inmarsat data. At a time when Inmarsat were saying ‘this actually belongs to Malaysia, Malaysian Airlines, we can’t release it’. Malaysia was saying ‘err, no, Inmarsat has to release it’. They just went round both and got the raw data.”
Victor’s blog post was explicit in descibing the provenance of the Log.
“The satellite data was shared with me by a relative of a Chinese passenger on MH370. The data was given to him by Malaysia Airlines”
737 Max certification reviewed:
https://www.transportation.gov/sites/dot.gov/files/docs/briefing-room/362926/scc-final-report.pdf
Relevant to Lion Air I think, at page 11/68:
“The FAA should acknowledge the international profile of operators of U.S. State of Design aircraft and implement the necessary changes for its aircraft certification system to consider differences in operations, training, and oversight across States.”
Certification to encompass maintenance and operational inadequacies? How far do you go with that?
@David
Certification to encompass maintenance and operational inadequacies?
You seem to be assuming that a ‘difference’ constitutes an ‘inadequacy’. That may be the case but it wouldn’t necessarily be generally so.
As that report notes in the section addressing Globalisation, the majority of US-designed and manufactured aircraft are registered outside of the US (the same would be true for EU-designed and manufactured aircraft). I don’t think that it is imprudent for the certifying authority for the State of Design/Manufacture to recognise that fact.
@David
RE: ”@Andrew. Might be of interest…”
Thanks. Sounds like there are some cultural issues that need to be sorted.
@Mick Gilbert
@David
RE: “You seem to be assuming that a ‘difference’ constitutes an ‘inadequacy’. That may be the case but it wouldn’t necessarily be generally so.”
Perhaps not, but the Special Committee concluded the FAA needs to recognise that some operators don’t meet the same standards that exist in the US. The next two paragraphs of the report state:
• Some members of the international community are using the Flight Standardization Board (FSB) reports intended for U.S. operators as the foundation for their operational programs, which was not their intended purpose. The FAA, therefore, should consider including operational requirements as part of the type certificate in order to better communicate minimum standards and promote advanced training and qualification programs. This would allow transfer of operational and training requirements through the validation process.
• The FAA should expand its engagement, policies, technical assistance, and training efforts to foster higher international safety standards and practices for aircraft certification, operations, and maintenance.
@Mick Gilbert. Fair comment though adding to @Andrew’s quotes, at page 42 onwards of the Report proper is the discussion leading to that recommendation. Amongst what it says;
“Manufacturers make assumptions during the design engineering process, including assumptions regarding pilot training standards and pilot execution of actions consistent with that training. Design decisions are often made according to the assumption that an “average pilot” will perform the correct action at the right time. The concept of the “average pilot” has evolved, and
the “average pilot” in one State (or jurisdiction) may not have the same skills as the “average pilot” in another. It is therefore important for manufacturers to have insight into their expected customer base and to design aircraft that take into consideration the expected end–users and variances in approach to pilot training worldwide.”
But yes the discussion does address broader issues also.
@David
@Andrew
It really comes down to whether a ‘different’ standard means a less safe or less adequate standard. The US Airline Transport Pilot (ATP) certificate requiring 1,500 hours for First Officers versus the Multi-crew Pilot Licencing (MPL) scheme for FOs that requires as little as 240 hours is one of the ‘different’ standards that immediately comes to mind.
I thought that the ‘average pilot’ discussion, particularly with regard to recognition/reaction times, was interesting. It’s worth remembering that the Joint Authorities Technical Review of the Boeing 737 MAX Flight Control System report from last October found that one of the assumptions about the average pilot, the ‘4 second rule’ for corrective action (viz that recognition time is assumed to be 1 second, and reaction time is assumed to be 3 seconds), had been completely misconstrued by Boeing and the FAA. They were using that ‘guidance as a design assumption that the pilot will be able to respond correctly within 4 seconds of the occurrence of a malfunction‘ whereas the correct guidance was that pilot recognition times will inevitably vary depending on the nature of the failure and other circumstances.
The positive thing is that both regulators and manufacturers are having a think about some long-held but possibly incorrect assumptions. The whole system should be made safer as a consequence.
@Richard. This is about the relevance of the French satellite images of the CSIRO’s, “The search for MH370 and ocean surface drift – Part III” to searching at your final transmissions’ position, 34.35˚S, 93.78˚E’. You commented about this at Dec 20th 5:53 AM.
Below is a methodology for looking into that based on that Part III’s modelling. It concludes that if the Pleiades items include some from MH370, which is as yet unknown, their likely drift speed and direction rule out the crash site being near that position, in other words the aircraft would have had to glide for a greater distance than realised in an unmanned descent, so would have been manned.
https://www.dropbox.com/s/v000i1tgyi4nmpz/Where%20the%20Pleiades%20images%20suggest%20searching%20with%20an%20FTP%20of%2034.35S%2C%2093.78E%2C%20should%20they%20depict%20debris%20from%20MH370.docx?dl=0
In commenting on the use of the Part III modelling for this Dr Griffin has told me that there is a small (~30NM) clockwise eddy centred near the FTP. He says, “This small eddy, and the flows around it and the larger features in which it is embedded, is only approximately represented by the model.” He adds however that, “…..the presence of the 30NM-radius eddy under the FTP is fairly certain, arguing fairly strongly against a glide of less than 30NM (if the Pleiades images are admissible evidence). The model gave us this result, too.”
Based on a glide being up to around 100 NM he agrees that , as to the quarter where the crash site might be, “…the focus can be restricted to the SW quarter”.
Even so he does have reservations about the model’s advice elsewhere, i.e., “against searching near the NE end of the east1 line (~40NM from FTP). I am less confident in that advice, and think that the ground due south of the FTP is worth searching, from 30NM radius out to 100NM radius. I.e. your dot points under point 5 should probably be relaxed.”
So he thinks that my ruling out a crash site south as I did, based on Part III, is not supported by his level of confidence in the modelling there and likewise in some specifics distances that I have suggested could apply further west.
As to the methodology being refined so that its SW search areas could be prioritised, he says, “I don’t think we can further prioritise within this domain without using a more-detailed ocean model, and further looking at the data (all types).” However, occupied elsewhere now, he does not intend any more modelling.
For my part, since relevance of the above relies on some of the Pleiades items being from MH370, and that may not be so, the importance of this is conjectural. Even so, I think it worth considering.
Also, like your FTP site, much of the SW area cross-hatched has been searched already though not that to the south. That therefore should be the higher priority of these two.
@Mick Gilbert. “The positive thing is that both regulators and manufacturers are having a think about some long-held but possibly incorrect assumptions. The whole system should be made safer as a consequence.”
Yes I thought the report was constructive as it was designed to be. Others have been very critical.
https://www.avweb.com/flight-safety/faa-regs/committee-finds-proper-process-followed-in-max-certification/
I meant the comments below the article.
@David
Can you provide the url for Dr. Griffin’s paper.
Thanks.
@David
Regarding the Pleiades images; to add:
Back in 2018 I had an exchange with Dr. Griffin about where the search should focus under the assumption that:
1. The Pleiades items were from MH370
2. MH370 crashed near the 7th arc (so the debris field was somehow missed in a scan)
The conclusion back then was: 35.5S near the arc is where the Pleiades images point to
There is an illustrating animation:
http://www.marine.csiro.au/~griffin/MH370/br15_MH370_8997_tp3l123_bh_east1/20140308.html
(click next, next , etc.)
Note: “Minchin et al. (2017) found the greatest number (9) of probably man-made objects in image PHR4”, See:
https://www.atsb.gov.au/media/5773371/mh370_csiro-ocean-drift-iiil.pdf
@Sid Bennett. https://publications.csiro.au/rpr/download?pid=csiro:EP174155&dsid=DS3
@Neils. Thanks re animation. Graphic illustration of that stream.
Yes PRH4 the principal ‘target’.
To reduce head scratching over my quotes from it, here is the body of Dr Griffin’s comments:
https://www.dropbox.com/s/g5rzietw4gwei0i/Dr%20Griffin%27s%20e-mail.docx?dl=0
Does anyone have a printed or higher resolution copy of the ATSB Report on the Search for MH370?
I am trying to determine the axis markings of Appendix C Fig. 2 which is said to be the pilot frequency measurements at Perth. However it appears slightly different from the data in the JON paper.
I have inferred that the x axis is 24hrs, but I am not certain that it starts at 0000. The y axis major divisions are either 1 or 2 Hz, I think.
My eyes are not god enough to reconstituted the pixelated numbers.
@Sid Bennett
you can get the digitized data from the YAPFF spreadsheet.
I can send you a copy I extracted or the entire spreadsheet…
@Sid Bennett
The left axis on the ATSB Figure 2 is 0000 hours.
Comparing the JON Figure 11. and the ATSB Figure 2. the data are different. There is a ~2 hour offset when overlaying the curves.
So is the x-axis Local? or Zulu? or is it data from a different day for illustration purposes only?
@George T
I am not familiar with the YAPFF spread sheet. Are ther othere interesting data?
victorI has my email, or use dropbox or whatever.
Thanks,
Sid
@GeorgeT
That was the basis for the inquiry. The data is also subtly different (apart from the 2 hr shift). According to the legend, the data is from Inmarsat. But it is not consistent with physical reality (eclipse time).
The ASTB report acknowledges that there are “minor” variations in the BFO at other times of day, and I have spent some time trying to achieve consistency with the BFO offset that most people use. The differences are fairly small. I have extracted the difference between both the JON paper and the ATSB figure and a sinusoid (representing the uncompensated portion of thesatellite motion effect). It shows the eclipse effect as expected and is consistent with the with the oscillator offect of Fig. 12 and the temperature curve of Fig.13. Since the data of Fig. 12 is derived data and the data of Fig. 13 is measured data, I will be trying to get the best fit of the temperature data to the frequency offset data that I have obtained.
I do not believe that the data can be from a different day. I once found a table of eclipse times, and the eclipse duration seemed to vary, but the time of maximum did not. (My memory could be faulty….)
@Sid
One FFYap spreadsheet here see Reference 4:
http://www.duncansteel.com/archives/1366
Sid Bennett: If you graphically lay one figure over the other, you will see that they are identical other than a 2-hour shift, i.e., the ATSB Appendix C figure goes from 02:00:00 to 02:00:00, and the JON figure goes from 00:00:00 to 00:00:00.
@VictorI
The offset of 2hr brings the two curves into close agreement. Any difference is likely due to post processing effects such as the granularity of the plot or averaging.
@TBill
Thanks. I looked at it briefly. The tabs showing the match to Figs 10 and 11 are a bit odd, as the computed period does not match the figures. I have actually digitized both the JON and ATSB graphs. But I need to re-sample the data to eliminate time base skew so I can make a direct comparison.
Probably tilting at windmills…
@Andrew, Victor. About the AoA indicator as a single data source, confusion in the 737 Max cockpits and future certification the following is from a “COSMOS” article on artificial intelligence.
“…..a team of international AI researchers led by David Gunning of the US Defence Advanced Research Projects Agency (DARPA) offer a clear account of what is known in current AI research as explainable artificial intelligence, or XAI.
The authors write that an “XAI system should be able to explain its capabilities and understandings; explain what it has done, what it is doing now, and what will happen next; and disclose the salient information that it is acting on.”
It would have been helpful I think if the MCAS system ‘explained’ (briefly!) that it was intervening on account of AoA data.
Sorry @Mick Gilbert and Victor I intended the second addressee to be Mick. My XAI system at work.
@David: Yes. Explaining the implications of disagreeing AoA sensors would also have been helpful.
@David
Re: ‘It would have been helpful I think if the MCAS system ‘explained’ (briefly!) that it was intervening on account of AoA data.‘
Yes, a bit like HAL explaining to Dave Bowman why it couldn’t open the pod bay door.
I was listening to a podcast on AI recently (I can’t recall which one) and one of the participants observed that what we should be concerned about with AI is not that it will take it upon itself to do things that it wasn’t programmed to do, rather that it will do exactly what it was meant to do and the programmers were just too dumb to consider all the possible consequences properly. There’s a hint of that in MCAS Mk.I.
@David
@Victor
RE: “XAI system should be able to explain its capabilities and understandings; explain what it has done, what it is doing now, and what will happen next; and disclose the salient information that it is acting on.”
“Explaining the implications of disagreeing AoA sensors would also have been helpful.”
A key consideration is obviously time, especially in situations where the pilot might only have a few seconds to assimilate the information and apply the appropriate corrective action.
@David @Niels
Regarding the debris drift models above, and reviewing old posts, the historic critiques of 35 South region were:
(1) Some debris should have hit western OZ shore(per the colorful visual)
(2) Non-predict of Roy timing reaching South Africa
Thus we have to assume, if the crash was at 35 South, the drift model was wrong re: Roy and OZ or we missed some OZ debris. If we envision a longer glide further south of Arc7, more of the same concerns I assume?
@TBill
Although I have not yet compiled enough information to write a paper on the subject, I am leaning towards the following:
Notwithstanding Richard et al., I have not convinced myself that the 186T path is wrong, although it may not be a unique solution.
Very early in the history of the IG, Barry, Geoff and I tried to interest the group in the glide scenario, but it was not favored as led to too large a search area, particularly in the context of the probability-based approach of ATSB/DTSG and the generally accepted zombie flight hypothesis.
Some months ago I suggested that a turn to 90deg at or after the 6th arc would be indistinguishable (based on BTO) from continuing on the original path. A 120nm glide from the 7th arc, continuing on about 90deg, would be consistent with the French satellite images and the short term drift calculations.
There is some serendipity in this hypothesis as a glide search scenario based on this model would overlap with a similar glide search scenario based on Richard et al.(at least based on the hints we have).
We need to think about this possibility when recommending the priority of sub-areas to search.
@TBill
Without diving into all details of drift modelling again:
I suppose Dr. Griffin considered these aspects in the context of the case for checking the “Pleiades” based potential impact locations. Perhaps the initial local westward drift is a factor to consider?
@Niels
Without diving into all details of drift modelling again:
I am NOT picking on you.
Tossing something into the ocean,and watching where it goes is not modeling (or modelling).
Going on with being unpopular:
AI is f’ing dead. It was over-hyped from the get-go. Blame journalists. I have played with AI a lot, and I know what I am talking about.
Self-driving cars?? Are way farther into the future than anyone has predicted. Self-driving planes??
@DennisW
CSIRO’s work was based on using BRAN2015, which is some kind of oceanic 3D circulation model. That’s more than “tossing something into the ocean and watching where it goes”, although in practice some of “your” procedure was used for calibration.
@DennisW
“This is your Captain speaking, I am working from home today!
I would like to introduce my co-pilot AlphaOmega2, a robot with over 20,000 flying hours.
Alpha is sitting in the cockpit.”
AI is not dead, it was never alive.
Turing proved you need a computer with an infinite memory for AI. Big Data is not big enough.
Expert Systems as used for Diagnosis, Automatic Landing or Self Driving Cars, are already available within a restricted domain, but a generalised artificial intelligence based system, with no domain restrictions, with the ability to make rational and emotional decisions, with a conscience and the ability to make ethical or moral judgements and the ability to make mistakes and learn from them … such a system will only be a collection of expert systems with restrictions.
Ocean Infinity. “Our new, ground-breaking battery technology has effectively doubled the vehicles’ endurance and capacity to collect data in a single deployment.”
https://oceaninfinity.com/ocean-infinity-pioneers-advanced-auv-battery-technology/
@Richard
AI is not dead, it was never alive.
You are way ahead of me. My daughter, computer science prof at Cal Poly SLO, makes a ton of money consulting on AI and machine learning. Good deal while it lasts.
I hate to go down there and debate with her and her colleagues. It never ends well. Typical South of the Gate nonsense.
@David
@Victor
@Mick Gilbert
@Andrew
Victor Iannello said:
January 20, 2020 at 9:59 pm
@David: Yes. Explaining the implications of disagreeing AoA sensors would also have been helpful.
Still haven’t reconciled an expectation that both the manufacturer AND the regulator would have considered “the implications of disagreeing AoA sensors” with the reality of what occurred.
In a fantasy world, one could construct a story that the subjects, first of disagreeing sensors, and second of use of only one active sensor to inform Active Interpreter (AI), were misplaced. In this story of a fantasy world, consideration of these subjects was left to Anyone Involved (AI) and not properly delegated, nor documented..
@George G
RE: ‘Still haven’t reconciled an expectation that both the manufacturer AND the regulator would have considered “the implications of disagreeing AoA sensors” with the reality of what occurred.’
It seems clear they didn’t, although I think the jury’s still out on who knew what and when.
Single sensor inputs are nothing new on the B737. The Turkish Airlines accident in 2009 has some parallels to the more recent MAX accidents, as discussed in the following article from The New York Times:
How Boeing’s Responsibility in a Deadly Crash ‘Got Buried’
@Victor
MH370 Cabin Comms-
I am learning from pilots over on Twitter that MH370 Flight Attendants/cabin crew probably had their own (ACARS?) text msg capability & Sat phone. SIR page 373 discloses that there was indeed a sat phone in the cabin. The cabin crew on many airlines commonly use these communication channels for forward gate info and other official flight admin business.
I am not qualified to comment on exactly how these capabilities would have been electronically implemented on MH370. However we know ACARS was stopped after 17:07. If I understand correctly, @DonT advises me that unlike the cockpit sat phone, the cabin SATCOM phone is OFF if the IFE/PASS SEAT is set OFF in cockpit; ie; those cabin communications options can be blocked.
But perhaps this gets us one step closer to explaining why a rogue pilot may have wanted to cut off the SATCOM at IGARI, and also why he/she might have opted to turn SATCOM back on at 18:25.
@TBill: What makes this all the more confusing is there is a distinction between exactly how it works, and how the captain might have thought it worked. For instance, it might not be safe to assume that the captain was aware that turning off the IFE/PASS switch would block SATCOM voice calls in the cabin. I’m told that this feature is not-well documented. On the other hand, powering down the SATCOM would be a certain way to block all communications that use the satellite link.
In addition to @Andrew, regarding TK1951 2009 accident:
Both the report from Dutch safety board and the report by prof. Dekker can now be found through:
https://www.onderzoeksraad.nl/nl/page/16234/reactie-op-berichtgeving-onderzoek-neerstorten-vlucht-tk1951
I cannot not do much better than Google translate; this is what the page contains:
“Response of the Dutch Safety Board in response to the media coverage of the investigation into the crash of flight TK1951 in 2009
January 21, 2020
The Dutch Safety Board is strictly independent in its work. The Board independently assesses the results of the investigations, the content of reports and the conclusions and recommendations.
The US authorities and Boeing have responded to the draft report, a standard investigation procedure. The comments of the parties and the response of the Dutch Safety Board are included in Appendix B of the final report and are therefore completely transparent.
The 2010 report clearly shows that the main responsibility for the crash lies with Boeing: the failure of the systems on board the Boeing 737-800 and the way in which Boeing dealt with earlier warnings. In addition, the pilots did not use the options for correcting this Boeing system error.
Prof. Dekker’s technical report has been processed by the Dutch Safety Board to substantiate the final report. At the time, however, it was not the practice to publish underlying studies. Current practice is different, the Council now publishes as much as possible when issuing a report. Given this current working method, the Dutch Safety Board has decided to publish Prof. Dekker’s report today.
The question of whether sufficient lessons have been learned by Boeing and the US authorities from the investigation into the crash of flight TK1951 in 2009 should form part of the ongoing investigation into recent accidents with Boeing 737 Max aircraft”
@Niels
The DSB website has an English-language version of the media release:
Reaction Dutch Safety Board on media reports investigation crash flight TK1951
@Andrew
Thanks for that; it was clearly late last night..
We will probably learn more about this case, as a committee from the Dutch House of Representatives intends to look into it:
https://nos.nl/artikel/2319931-kamer-wil-boeing-topman-horen-over-crash-turkish-airlines.html
@Niels
Yes, it seems the Dutch House of Representatives is concerned about the NYT’s allegations. They’ve invited the DSB, Boeing, the NTSB and Sidney Dekker to a ’round table discussion’:
https://www.tweedekamer.nl/debat_en_vergadering/commissievergaderingen/details?id=2020A00278
Translation:
“According to the New York Times, aircraft manufacturer Boeing has been able to exert decisive influence over the conclusions in the report of the Dutch Safety Board (OVV) regarding the cause of the crash of Turkish Airlines flight TK1951 in 2009, where nine people lost their lives . The findings of scientist and Boeing 737 co-pilot Sidney Dekker would only be referred to as minimal due to pressure from Seattle.
This case raises fundamental questions about the influence that a company with commercial interest has on an OVV report. The independence of the OVV is the most important guarantee that the council can put its finger on the sore spot, so that it is learned from every safety incident, especially where human lives are lost. If aviation safety is investigated, a commercial company with a strong vested interest should not have any influence on the conclusions, whether it is an airport, an aircraft manufacturer or an airline. The question of whether that has actually happened also touches on other investigations in the aviation domain where commercial parties have major interests and which parties need for the provision of information from the OVV.
The independence of the OVV – and its opinion on safety in Dutch aviation – must be beyond doubt. That is why the Infrastructure and Water Management committee would like to invite the Dutch Safety Board to provide openness about this case in a round table discussion and possibly to draw lessons for the future. To ensure this openness and to be able to draw lessons as a Chamber, the committee decided to organize a round table discussion about the OVV report on the TK1951.”
@David
David, what are your thoughts on recovered debris item 22 – part of the right vertical stabilizer panel? Any view on what sort of force(s) would cause that sort of fracture and squashing damage to the interior laminate while leaving the outer skin only relatively mildly damaged?
@Mick Gilbert. I see the Malaysians left aside damage assessments, being intent on identification only and merely commented that the inside looked “squashed”, as you say.
http://mh370.mot.gov.my/Appendix1.12R-Item22RightVerticalStabilizerPanel.pdf
The honeycomb is described as aluminium below and from that visible it does not look badly crushed generally. The segment’s fastener line at its rear has sheared and likewise at the front there is no sign of the fasteners attaching that to the stabiliser leading edge. Commonly the skin in tension will tear along the fastener holes though here the two skins are joined. Maybe that explains that.
See the video beneath the photo of “Roy”
https://www.dailymail.co.uk/news/article-4297982/How-three-year-hunt-yielded-fragments-MH370.html
The difference in adjacent red paint colours is odd. The large part looks faded yet there is that sharp line of distinction between it and the bright red. The top coat may have been stripped off but of itself that would not explain the faded red beneath.
Other points are;
• the AF447 vertical stabiliser came off whole,
• the similar (leading edge) piece of MH370’s right stabiliser upper surface, item 3,
http://mh370.mot.gov.my/Appendix1.12BItems2&3No.FlapSupportFairing&RightHorizontalStabPanel.pdf
• absence of deep gouging of both from the impact of more forward parts,
• the recovery of no items identified as rudder or elevator parts.
So the empennage may have been fragmented. Based on 747 experience this leading edge damage would not be the result of flutter.
I remember your raising whether that peculiar creasing of the interior skin (looks like fibre glass and perhaps foil lined?) was the result of cabin over-pressure blowing it off from the inside on impact forward and accounting for the squashing. It does look odd and the result of compression though I think quite likely from buckling, the outer skin flexing. It does appear to have residual deformation.
Having a professional damage assessment done on such recovered items, with them to hand, might have given many more clues as to how they separated.
Incidentally we await yet the report on the right engine vortex generator and another part that the Malaysians received some months ago. Ideally they will have sought advice from manufacturers as to what its fractures and appearance mean. Both it and “Roy’ suggest a high speed impact yet the engine right cowling (item 6) is much larger.
@David
Very good, thank you for that.
@David said: Incidentally we await yet the report on the right engine vortex generator and another part that the Malaysians received some months ago.
Why do you believe that a report on the vortex generator (and other parts) is forthcoming? I suspect that until the debris field is found, the official investigation is inactive.
@Victor. Probably as you say, though they have taken months before….
If it should be that only finding a debris field will reactivate any investigation maybe there will be no more offers of recompense to encourage that and indeed another search would not need their concurrence.
@Mick Gilbert. Corrections to some detail in my above please, for the record.
First, the experience with empennage flutter was gained from the Silk Air Flight 185 crash of a 737. The 747 separations during China Airways Flight 006 were due to stress
Second, I refer to the piece from the right stabiliser upper surface as being from the leading edge. The report on it depicts it being near there though from some discussion with Gysbreght some years ago my personal opinion remains that it was from the upper surface tip, because of an offset in its moulding.
https://i.dailymail.co.uk/i/pix/2017/03/09/18/3E1CB1EC00000578-4297982-A_piece_of_horizontal_stabiliser_was_found_on_February_28_2016_b-a-2_1489085052882.jpg
@David
G’day David, thank you for those clarifications.
So, you think that debris item 3 (‘No Step’) is actually a piece of the panel that is outboard of horizontal stabiliser panel No. 3 upper? Technically, it wouldn’t be classified as being from the leading edge as it sits behind the leading edge panel.
Any old how, I had noticed that ‘No Step’ had come from the same section of the horizontal stabiliser that was separated inflight on Silk Air Flight 185. Now, I know that we’re talking about different aircraft and quite possibly different materials/constructions but I thought that that was interesting.
@airlandseaman
@Don Thompson
Et al
Gents, was there a view formed as to whether the Elta EL/M-2022(V)3 surface search radar fitted to the RAAF AP-3C Orions would have been likely to have detected the floating flaperon if it was in one of their search zones?
@Mick Gilbert
During my conversation with the search leads at AMSA, the conclusion was that airborne surface search radar would not have detected the composite build flaperon.
IIRC, the first observation of AF447 debris was visual. Other RAAF AP-3C long range maritime search & rescue ops have been guided to yachts in distress by EPIRBs.
@Don Thompson
Thanks Don.
@Mick Gilbert. Yes. “No Step” outboard of the auxiliary spar to front spar panel, at the tip, immediately inboard of the tip cap, though I cannot locate the photo that helped. ‘No Step’ ran chordways.
However I would not call the evidence conclusive.
Of interest as you say, the separation was from such areas in the Silk Air 737.
https://www.dropbox.com/s/pl01djeptbd037f/Silk%20Air%20737%20separated%20horizontal%20stabiliser%20sections.png?dl=0
@Mick Gilbert, David
Diagram of complete empennage structure. Closing/cover panels, i.e., “No Step”, are not shown but they fit between front spar and leading edge.
I’ll attempt to get the full document, from which the images is sourced, via library tomorrow.
@Don Thompson. I attach a Gysbreght photo illustrating the kink in the panel fasteners, matching that in moulding beneath. He had cut along a photo of the item to illustrate.
https://www.dropbox.com/s/4573ka67jkhcs6h/NoStepFragment.JPG?dl=0
My recollection is that in a photo of a 777 horizontal stabiliser from above there appeared to be a kink in a chordwise fastener line inboard of the tip fairing but there was no such kink in the spanwise panels’ fastener lines.
Clearly the kink(s) would be to pick up structure below.
Still, again as I remember it, the panel dimensions would suggest it would have been a tight fit (if it could be squeezed in at all) had it been at the tip.
It is hard to see from your structural diagram where those kinks would be needed. Maybe you library search will help.
From the AMM descriptive of the -300 series the skin panel layout in that model is different.
It would be handy to have a photo of a Malaysian stabiliser from above, illustrating the fastener lines and where the “No Step” stencilling was. I notice that Victor’s image at the introduction to this post does not help.
All that said I acknowledge that the ATSB finding has a ring of certainty and so far as I can see the whole issue has no consequence much anyway, at least as yet anyway.
@Don Thompson. Eureka.
Posted by Gysbreght:
https://www.dropbox.com/s/v1s8zas0obr8lhb/B777_HS_photo1.png?dl=0
Response by me:
“When I blow it up the quality goes but there does appear to be a kink in just the right spot, below and to the left of the No Step. Would you confirm please? Length flange to apex is about 65cm. Do you think there is that tip cap width before the curvature at the tip?”
Response by him:
“Yes, I see that line too, but I think that line is about 57 cm from the tip. (The tip chord is about 250 cm).
So maybe it’s not a B777 fragment after all?”
Response by me:
“……I think that line is about 57 cm from the tip.” My estimate was scaled from the ruler in a perpendicular photo. I have now found measurements, from a CNN report; 35in X 22in. If right, 56 cm of flat is needed before meeting the tip curve. This would be possible, depending on the length of the curved section at the tip, if your approximate estimate is less than as measured, and/or the 22in is a rounding-up. If it were found possible, confirmation would be needed that there were no other contenders from the 777 or like aircraft.
Unfortunately the ‘as measured’ might be hard to get and I can find no photos or drawings which would do the trick.”
I do not know the source of the above photo or the 777 model.
@david. if you need a photo of specific areas of a 777-200, let me know. i can’t guarantee the view that you want, but i will be taking a flight on one tomorrow (british airways).
Seabed Constructor is gone, say hi Pacific Constructor!
@don. I can’t help but wonder how horrible the windage is on that massive heli-pad in some good-old southern ocean weather.
@David
@Victor
Re: Jet Fuel Tank Model
I made up surrogate analyses for a typical Jet A-1 fuel below. Included are input properties for an on-line vapor/liquid equilibrium calculator at ChEcalc.com (select Vapor Liquid Equilibria calculator and then Multi Component Flash Calculator). Add a case with N2 and O2 and the jet fuel components, and you end up with a decent fuel tank model down to about 0 deg F.
At KLIA I estimate the wing tanks at approx. 80% full each with about 54000-lbs of fuel and about 8000 gallons (340 lb-moles). That leaves 2000-gal vapor space and I assumed another 2000-gal open space, and then you have to add about 1700-gals air, representing air that dissolved into the fuel during storage. That only gives 2 moles of air per 340 moles fuel, so only a miniscule amount of fuel evaporates and vents out upon ascent.
Assuming 75F fuel temp, around 8-psia (FL150) the vapor space exceeds 0.6 mol% which is approx. start of flammable range, which apparently most flights will temporarily transition through this zone (not sure how low ambient pressure impacts the flammable limits). I remain skeptical of vapor lock potential on gravity flow but presumably gravity flow could be problematic on empty tank. Apparently Boeing has a FTPP (Fuel Temp Predictor Program) calculator mainly for cold flow concerns.
Link for estimated jet fuel properties-
https://twitter.com/HDTBill/status/1222935727492751365?s=20
@Paul Smithson. Your 777-200 trip. Thanks Paul. I do not know whether they will let you get at it or how but a shot of the horizontal stabiliser upper surface either side, particularly the front half and tip and showing fastener lines, would be the ants pants.
@Andrew, Niels. Re the 737 Max, leaving aside all the negatives and hindsight of the NYT article and the questionable and defensive response from the Dutch Safety Board – though its report was generally thorough – to me the most compelling document to come to light recently was the radical review sought by the NTSB Safety Recommendation Report. The NYT mentioned that in passing.
I thought that deserved more attention and so have summarised some findings and recommendations at the URL below.
Besides that though, a couple of comments in passing on the some other documents are these:
• While generally thorough the Dutch Report at page 28 (last paragraph) says that immediately before the aircraft hit the ground, stalled, there was, “….a warning with regard to a sudden change in wind speed and direction.” This goes undiscussed and unmentioned elsewhere, leaving it unclear to me whether that was a clerical error or it was overlooked. Even though the aircraft was irrecoverable at that point, had there been a wind change earlier that just then reached ‘warning’ point?
There is no mention of this in the meteorological information.
False warning perhaps.
• For my part the Dekker pages 42 and 43 are of particular interest as to what a pilot should know, that increasing with automation, and the brief history of changed US concepts.
• The Boeing 737 MAX Flight Control System JATR international study dated October 11th, 2019, chartered by the FAA and also referred to by the NYT also has made many observations and recommendations for modernisation and improvement to the certification process.
https://www.dropbox.com/s/qhsfgqu6d0pl5ts/Comments%20on%20NTSB%20report%20post%20737Max%20accidents.docx?dl=0
@PaulS
My understanding is 9M-MRA and 9M-MRE are or were at KLIA being prepared for sale. I would look at area where they retrofit the ELT into it, I would look to see if IFE/SEAT PASS button was put in (PMDG777-200 flight sim does not have it), see if EE Bay door is obvious ask if locked. Things like that.
[Comments here are closed. Please continue the discussion under the new post.]