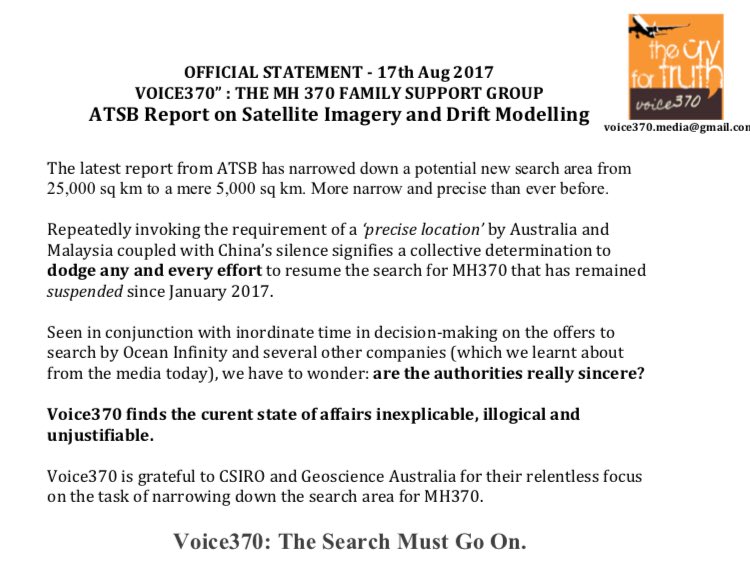
Drift model for a crash site at 35S latitude. Black lines are paths for debris and arrow heads are positions on December 31, 2015. (Click on image to enlarge.)
A recent report from Australia’s Commonwealth Scientific and Industrial Research Organisation (CSIRO) was greeted with much fanfare. A previous report published in December 2016 predicted that MH370 would be found along the 7th arc at 35S latitude. With new results in, the ATSB proclaimed that they were even more confident in their findings.
Using advanced computer models of how debris from the crash might drift across the Indian Ocean towards Africa, and comparing those results to the location and timing of debris discovered along the shores of Eastern Africa, it was possible to narrow the location to 25,000 sq km of unsearched sea bed. However, the results from this model, presented in December 2016, did not predict that one of MH370’s flaperon would arrive on the French island of La Reunion by the discovery date of July 2015. This perplexed the researchers at CSIRO, who were committed to better understand the discrepancy.
Researchers knew that because the recovered flaperon floated with a portion above the water, the drift path was more heavily influence by wind and waves than debris that floated flat on the surface. The computer model for the flaperon was therefore adjusted for the extra “leeway” by measuring the drift behavior of replica flaperons that were constructed and tested by CSIRO. However, even when the computer model for the flaperon was corrected for this extra leeway, the drift models still did not predict that the flaperon would arrive in La Reunion by July 2015. That was until the American National Transportation Safety Board (NTSB) was able to locate a spare flaperon, which was modified by Australian investigators to resemble the flaperon debris that was recovered. The drift behavior of the modified flaperon was then experimentally measured just as the behavior of the replicas was previously measured. The experimental results said that the computer model should include even more leeway, and the wind would also tend to push the flaperon about 20 degrees to the left. When these effects were included in the computer model for the flaperon, the drift models now predicted an arrival date in La Reunion that was consistent with the discovery date of July 2015, and this was released in a new report. CSIRO felt as though the last missing piece of the puzzle was found.
As reported recently in the media, these results gave CSIRO even higher confidence that its drift models are correct, and MH370 would be found along the 7th arc at 35S latitude. Surprisingly, nowhere in those stories was it reported that at this latitude, the seabed was already searched to a distance of about 20 NM from the arc without finding the plane.
Fellow IG member and co-collaborator Richard Godfrey viewed CSIRO’s drift model with skepticism. He had already performed his own drift study using a computer model he had independently developed, which I have previously discussed and published on this blog, and he came to a much different conclusion. He argued that the timing and location of the debris recovered along the shores of Africa were not consistent with a crash at 35S latitude. Rather, a crash at 30S latitude, well north of the seabed search, was much more likely.
Rather than post Richard’s short comments on this blog, I asked him to prepare a more in-depth critique of CSIRO’s work, as certainly his comments would raise many questions. Within 24 hours, a critique arrived in my inbox, which I publish in full here. In addition to the simulated trajectories of debris, Richard also includes the effect of temperature history on barnacle growth, and comments on the effect of storms in the region. He concludes: Despite the significant contribution in refining the accuracy of the drift model, the new data is interpreted as confirming the findings of the ATSB First Principles Review. The pre-conceived idea, that “other evidence” constrains the MH370 End Point to between 32°S and 36°S is a false assumption. A MH370 End Point at 35°S does not fit the fact that the underwater search has already discounted this location to a 97% level of certainty. An MH370 End Point at around 30°S does fit the available data.
While Richard was preparing his critique, I tried to independently reconcile the differing conclusions of CSIRO and Richard. Basically, CSIRO was predicting a crash site at 35S, and Richard maintained that a search at 30S had a much higher probability of success. Fortunately, the results of CSIRO’s drift studies were made available as KMZ files that could be imported into Google Earth. Using these files, as well as the recent report and the report from December 2016, I was able to piece together some information.
The arrival of debris on the shores of Eastern Africa is highly dependent on the latitude of the crash site. In general, crash sites further to the north along the 7th arc will produce debris that arrives earlier in Africa. After traveling west across the Indian Ocean towards Africa, the debris then tends to travel south. Therefore, debris reaching Eastern Africa would beach last on the shores of South Africa.
The figure at the top of the article shows the position of debris on December 31, 2015, as predicted by the CSIRO model for a crash site along the 7th arc at 35S latitude. The debris is assumed to have “low windage”, which is consistent with the shape of the engine cowling and flap fairing that were discovered in Mozambique and South Africa in December 2015. As can be seen in the figure, CSIRO’s model does not predict that a crash site at 35S latitude would produce debris that would beach as far south along the shores of Eastern Africa as the actual debris that was found. The results of CSIRO’s model are in this respect consistent with the findings of Richard Godfrey.
So why does CSIRO maintain that a crash site at 35S produces debris of the correct location and timing as what was found? The answer lies in a panel from Figure 3.2.1 of the report from December 2016, which is shown below. The vertical axis represents the latitude of potential crash sites along the 7th arc, and the horizontal axis represents the time of arrival along the shores of Eastern Africa, and the color represents the associated probability, with dark blue the lowest probability and red the highest. The red and white bar shown in the figure is aligned along December 2015, which is when the first debris in Eastern Africa was found. And indeed, the colors in the figure do show that for a crash site of 35S latitude, the debris will start to reach Eastern Africa around December 2015.
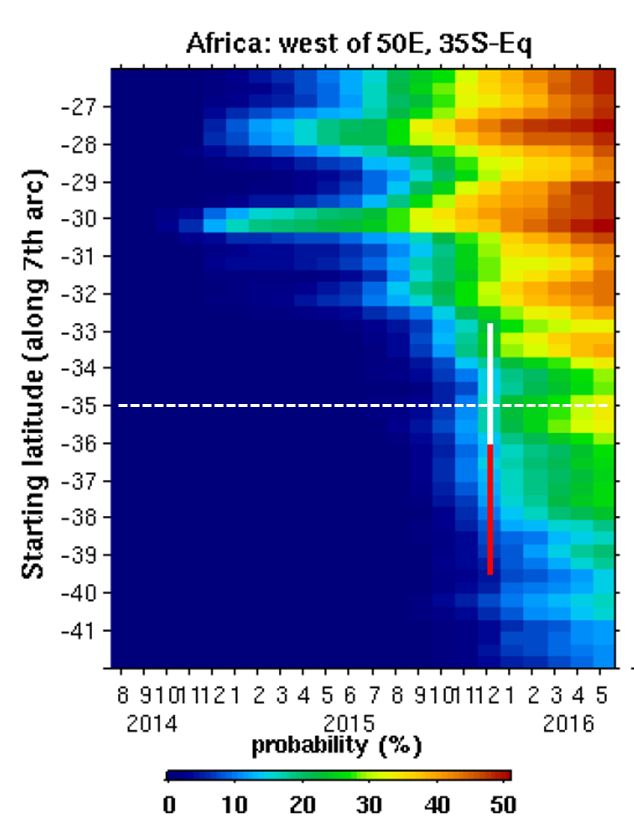
Probability of reaching Eastern Africa for various crash site latitudes. (From CSIRO, Dec 2016.)
What is not shown in the figure is the timing of when debris will reach various locations along the shores of Eastern Africa. Instead, as can be seen in the title above the figure, all locations along the shores of Eastern Africa from 35S latitude to the Equator are grouped together. But we know that debris will reach locations further south along the shores of Eastern Africa last. In fact, CSIRO’s own model predicts by the end of December 2015, the “non-flaperon” debris, i.e., debris with low windage that floats relatively flat on the water, will reach the shores of Eastern Africa only between 1S and 12S latitudes. On the other hand, the debris was found in Mozambique at 24S latitude and in South Africa at 34S latitude, which is well outside of the range of latitudes predicted by CSIRO’s model.
CSIRO might argue that although a crash site of 35S doesn’t allow debris to reach South Africa by December 2015, a crash site of 30S, as suggested by Richard Godfrey, would have produced debris along the northern shores of Eastern Africa well before Blaine Gibson found the portion of the horizontal stabilizer (nicknamed “No Step”) in March of 2016. In fact, debris might have arrived well before Mr Gibson’s discovery, and either was not found, was beached and later was again carried out to sea, was caught in offshore eddies, or was found and not reported. In these cases, a distinction should be made between the date of discovery and the date of arrival. Obviously, the arrival must always precede the discovery.
Based on the results of the drift models of both CSIRO and Richard Godfrey, recent claims about the most likely crash site of MH370 should be carefully reviewed by independent investigators.
Update 1 on April 24, 2017.
For those wishing to explore the drift model results in Google Earth, the KMZ files generated by CSIRO are available for the flaperon debris, for non-flaperon low windage debris, and non-flaperon high windage debris. The particular file I used to create the image at the top of the article is the file for low windage, non-flaperon items starting at 35S latitude. Once dragged into Google Earth, simply move the time slider and observe how the particles travel in time.
Update 2 on April 25, 2017.
The Guardian has published an article that discusses our interpretation of CSIRO’s results. “Both CSIRO and the ATSB have been contacted by Guardian Australia for their response.” No response has yet been received by reporter Elle Hunt.
Update 3 on April 26, 2017.
I received the following email from David Griffin of CSIRO:
Dear Victor,
I saw the Guardian article referring to your blog. A few comments:
- You are correct that ‘Roy’ was found at an earlier date than the model predicted. But to be fair, the model error is ‘just’ 2 months. I consider Roy’s arrival time – before anything else upstream – to be something that is simply too hard for any present-day model to convincingly explain. You’ve seen the paths that things take. But those paths should not be interpreted too literally. Our Dec 2016 report mentions that we do not have confidence in the model’s ability to hindcast the arrival times of individual items along the African shore. That’s why we focussed on the more-robust things that the model tells us.
- As you correctly pointed out, a 30S crash site would, according to our model, have resulted in debris washing up on Madagascan and Tanzanian shores a full year earlier than was observed. That is a discrepancy that is hard to set aside.
- The other factor against 30S that we find very hard to discount is that 30S is right in the middle of the zone targeted most heavily by the surface search in 2014. This is the “other evidence” that Richard overlooked. Please see Section 4 of our Dec report, and Fig 4.2 of the April report.
Best regards
David