Figure 1. Great circle paths that match the satellite data after 19:41. (Click on image to enlarge.)
Introduction
In the last post, I presented how the simulation data found on the home computer of Captain Zaharie Shah suggests that the recovered data were from a single flight session on Feb 2, 2014, in which the aircraft takes off from Kuala Lumpur International Airport (KLIA), flies northwest over the Malacca Strait, flies past the Andaman and Nicobar Islands, turns to the south, and exhausts its fuel in the Southern Indian Ocean. The simulated flight could have represented a diversion of flight MH150 from KLIA to Jeddah, Saudi Arabia, which the captain commanded two days later on Feb 4, 2014.
The alignment of data set 10N (the northernmost), 45S1 (just after fuel exhaustion in the SIO), and Pegasus Field (NZPG) at McMurdo Station, Antarctica, suggests that the simulation user might have selected autopilot and used LNAV mode. If LNAV mode is selected, the aircraft follows a great circle path between the starting and ending waypoints of the active leg. This raises the possibility that McMurdo was used as a final waypoint for navigation with the expectation that fuel would be exhausted in the SIO, well before reaching Antarctica.
In this article, I reconstruct flight paths with the assumption that MH370 was flown in automated flight in a similar way as in the simulation session. In particular, I reconstructed flight paths using the following two criteria:
- After 19:41, MH370 was flown in under autopilot, and was following a great circle path in LNAV mode and speed was controlled using the autothrottle.
- In addition to (1), after 19:41, MH370 was following a great circle path that leads to an airport in Antarctica.
What this article does not consider is how drift analyses based on the location and timing of recovered debris from MH370 affects the impact probabilities along the 7th arc. A review of the available drift analyses needs to be considered along with any path reconstruction studies before a new search area can be recommended with any level of confidence.
Flight Paths Along Great Circles after 19:41
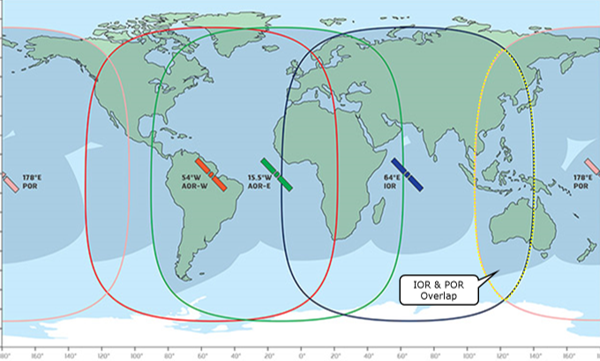
Figure 1 shows the path (green) of MH370 as captured by Malaysian civil and military radar. After the last radar capture at 18:22, all we have to help us reconstruct possible paths are the Burst Timing Offsets (BTOs) and Burst Frequency Offsets (BFOs) from communication between the aircraft, Inmarsat’s F1 satellite above the Indian Ocean, and Inmarsat’s Ground Earth Station (GES) at Perth. The BTO values indicate how far the aircraft was from the satellite, and therefore possible locations that satisfy the BTO values form an arc when plotted. Shown in Figure 1 are the arcs at 19:41 (the 2nd arc) and 00:19 (the 7th arc). While the BTO values are indicative of position, the BFO values are indicative of the speed (horizontal and vertical) and track of the aircraft. The BFO nvalues tell us, for instance, that MH370 was traveling south after 19:41, and also tell us the aircraft was in an increasingly steep descent at 00:19.
The radar path ends as MH370 was traveling northwest in the Malacca Strait. Yet we know from the satellite data that the flight ended in the SIO, and the satellite data after 19:41 shows a progression of values consistent with automated flight. The details of how MH370 might have been flown between 18:22 and 19:41 is still the subject of much debate, and it is possible that multiple maneuvers occurred in this time period. (I’ll be presenting some thoughts on this in the next article, benefiting from some new insights.) For now, we start our analysis at 19:41 and don’t consider the time period between 18:22 and 19:41, but also recognize that some of the paths presented below may be eliminated by constraints imposed when the time period 18:22 – 19:41 is considered.
The reconstructed paths starting at 19:41 and ending at 00:19 are shown in white in Figure 1 for paths at a constant pressure altitude of 35,000 ft. Wind and temperature data from GDAS were used to relate Mach number to ground speed. Each path corresponds to a specific track angle at 19:41. (The track angle will in general vary along each path as would be expected along a great circle.) Initial track angles between 162°T and 192°T were considered, and these paths cross the 7th arc over a range of latitudes between 22S and 40S. For each initial track angle, the position at 19:41 was found that minimized the RMS error for the BTO at the times 19:41, 20:41, 21:41, 22:41, and 00:11. (The position at 19:41 was not constrained to fall exactly on the 2nd arc.) The corresponding RMS error for the BFO values at times 19:41, 20:41, 21:41, 22:41, 23:14, and 00:11 was also recorded.
For automated control of speed, two autothrottle modes were considered for the time period between 19:41 and 00:11: constant Mach number, and Long Range Cruise (LRC), in which the Mach number decreases as fuel is burned and the weight decreases. For the time period between 19:41 and 00:11, a speed is chosen so that the aircraft exactly crosses the 7th arc at 00:19 .
The LRC speed schedule also serves as a proxy for ECON speed, for which the speed also varies with aircraft weight. ECON offers better cost efficiency than LRC because the relative value of time and fuel can be adjusted through a Cost Index (CI) parameter, and because the Mach number is adjusted for wind. However, I chose to not consider ECON speed here because the speed profile would be similar to LRC (depending on the CI), and the exact methodology is not generally available to the public for calculating Mach number as a function of weight, altitude, Cost Index, and wind. (Bobby Ulich has just published a model that makes excellent progress in this regard.) If ECON speed had been considered, it is possible that the BTO values for the same of the paths would have marginally improved.
Figure 2 shows the BTO and BFO errors across a range of latitudes for crossing the 7th arc. Some observations are:

Figure 2. Match to satellite data after 19:41 for great circle paths. (Click on image to enlarge.)
- For latitudes south of 34S, the LRC speed is too slow, and constant Mach number results in a better BTO fit.
- For latitudes north of 34S, the speed reduction offered by LRC speed results in a better BTO fit than for constant Mach number.
- For the paths at constant Mach number, the Mach number varies between 0.801 for a crossing at 22S, to 0.842 for a crossing at 40S.
- Constraining the BTO error to less than 32 μs eliminates paths crossing the 7th arc north of around 26.6S.
- Constraining the BFO error to less than 7 Hz eliminates paths crossing the 7th arc south of 39S latitude and north of 28S latitude.
- The minimum BTO error for LRC speed occurs for a crossing of the 7th arc around 33S latitude
- The minimum BFO error occurs for a crossing of the 7th arc of around 35S latitude.
Flight Paths Leading to Waypoints Past 7th Arc
From among the family of reconstructed paths that follow great circles between 19:41 and 00:19, we consider three paths that align with three airports in Antarctica: South Pole (NZSP), Pegasus Field-McMurdo (NZPG), and Wilkins Runway (YWKS). In August 2014, I first considered a path towards the South Pole that might have occurred after a possible landing at Banda Aceh airport (WITT). Although I have long abandoned the possibility of a landing, the scenario of a holding pattern near Banda Aceh followed by a cruise on a due south course remains an interesting possibility. More recently, the path towards NZPG was investigated in a paper I co-authored with Richard Godfrey, and subsequently Richard proposed the YWKS destination in a separate paper.
The three paths to airports in Antarctica are shown in Figure 1 as black lines that extend past the 7th arc. The coordinates as the paths cross the 7th arc are also shown.
Added Nov 10, 2017: Additionally, a fourth path is shown which aligns with 45S, 104E, which are the coordinates from the final data set found on the captain’s home computer. This case is included to represent the scenario where MH370 was flown towards the location where fuel exhaustion was simulated on the captain’s home computer.
The match of the four paths to the satellite data is shown in Figure 2. Of the four, the path to NZSP crosses the 7th arc closest to the latitude where the BFO and LRC BTO errors are at their minimum values. (Lower BTO errors occur for constant Mach paths crossing at more southern latitudes. However, any path requiring Mach numbers faster than LRC is unlikely to have enough fuel.)
More on the Path Towards the South Pole
The flight towards the South Pole is interesting because there are several ways that the autopilot might be used to create this flight. In LNAV mode, a pilot could enter a custom waypoint with a latitude of 90S and any longitude. Or, he could enter the built-in waypoint for the South Pole, which is SPOLE. Or, if it’s available in his waypoint database, he could enter the waypoint for the runway serving the South Pole, which is NZSP. Any of these methods would cause the aircraft to follow a path that closely follows a great circle to the South Pole. Also, if a pilot wanted to reach as far south as possible, a path towards the South Pole using LNAV would be an obvious selection.
Another procedure would be to use TRK SEL mode, with a value of 180° and the NORM/TRUE switch set to TRUE. Although this would produce similar results as the method using LNAV, it is possible that the aircraft could at times deviate from the required track, and the path could deviate from a great circle. For instance, a wind gust or turbulence could momentarily cause the track to deviate. Although the autopilot would correct for the deviation and bring the track back to the target value of 180°T, the error in path that accumulated during the track deviation would not be corrected. By contrast, in LNAV mode, deviations from the great circle path are continuously corrected so path errors don’t accumulate.
There is also close alignment between this path towards the South Pole and waypoint BEDAX. I’ll discuss this more in a future article.
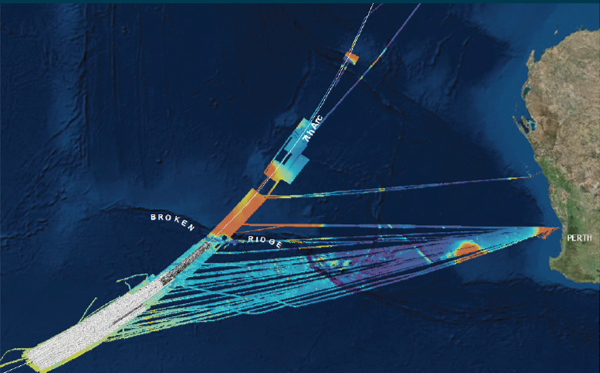
Figure 3 shows an exploded view of the search area, showing the boundary of what was previously searched (yellow), and where CSIRO proposes to search next (green). The new search area extends about 25 NM to the northeast of the 7th arc at 35,000 ft (blue), and about 27.5 NM to the southwest. The three impact sites proposed by CSIRO are also shown, ordered by their priority. In this part of the arc, the width of the searched area is about 19 NM to either side of the 7th arc. The highest priority impact site is 23 NM to the southeast of the 7th arc, and falls within the proposed search area, which extends between 19 NM and 27.5 NM from the 7th arc.

Figure 3. Exploded view of search area proposed by CSIRO. (Click on image to enlarge.)
The path that extends to NZSP (white) is also shown in Figure 3, which runs along 93.7E longitude. At the point of crossing the arc, the width searched was only about 6.5 NM to the northwest and 15.6 NM to the southeast. The fact that this part of the arc was only narrowly searched presents an interesting opportunity to search in the future.
In the future articles, I’ll present more thoughts on how the MH370 aircraft might have been flown between 18:22 and 19:41, and the implications for possible impact sites along the 7th arc.
Update on November 10, 2017
Here is a CSV file with data for the great circle paths, including the position and track at 19:41, position at 00:19, and speed mode. Included are the data for four paths that align with waypoints past the 7th arc. The four waypoints are the South Pole (NZSP), Wilkins Runway (YWKS), Pegasus Field-McMurdo (NZPG), and the fuel exhaustion position from the simulator data (45S, 104E).
Update on November 11, 2017
In Figure 4 below, I have plotted the paths to the four waypoints (NZSP, YWKS, NZPG, 45S) on the same plot that was generated by CSIRO to show the cumulative probability of detection of low-windage debris by the surface search for various impact points along the arc. The calculated probabilities include the drift that might have occurred between the time and location of the impact and the time and location of the search. It can be seen that there are impact points along the 7th arc and north of 33S where the probability of detection is significantly less than 100%, especially if the impact was to the northwest of the arc.

Figure 4. Efficiency of surface search shown with selected great circle paths. (Adapted from CSIRO.) (Click on image to enlarge.)
Update on November 14, 2017
IG Member Brian Anderson has reminded us that “There are a number of RNZAF photos of interesting flotsam (debris), in areas that may now be much more significant. Unfortunately none was ever recovered.” Two of the more interesting photographs are found below. The first photo (Figure 5) is an unknown object that could be part of an aircraft. The second photo (Figure 6) is a field of floating debris.

Figure 5. Aerial photograph (5849) of unknown object on March 29, 2014, at 28.8866S, 96.0844E. (Click on image to enlarge.)

Figure 6. Aerial photograph (5832) of debris field on March 29, 2014, at 28.3927S, 97.7750E. (Click on image to enlarge.)
Both photographs were taken on March 29, 2014, at coordinates not far from where the great circle path to 45S,104E crosses the 7th arc near latitude 28.3S.
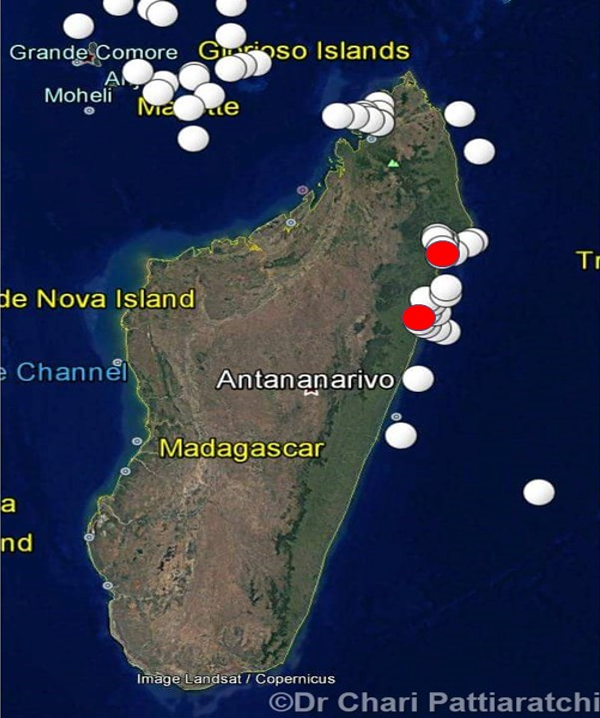
In order to determine if these objects are consistent with the expected drift of debris from an impact near 28.3S on March 8, 2014, I used the CSIRO-generated drift results for an impact on the arc near 28S latitude, where the drift model was seeded with objects within an approximate +/- 0.5 deg square area. The drift model results are shown in Figure 7 for the calculated position of debris on March 29, 2014.

Figure 7. Drift results from CSIRO for an impact along the 7th arc near 28S latitude. (Click on image to enlarge.)
The results are shown for low windage debris (red) and high windage debris (green), and should be representative of a range of objects produced by the impact. Both the unknown object and the debris field are found in the general vicinity of where the model predicts objects would drift for the modeled impact location. This makes the possible impact site of 28.3S even more interesting.