
View of cockpit during descent. The Nicobar Islands are in the left windshield. (Click to enlarge.)
Introduction
As readers here know, we have considered the possibility that MH370 turned to the south later than 18:40 UTC and crashed along the 7th arc to the north of the seabed that was searched. What led investigators in the past to believe that MH370 turned at some point between 18:28 and 18:40 are the satellite data obtained at times that bookend this time interval. If we assume that MH370 was flying at nearly constant altitude, the BFO value at 18:28 is consistent with a plane flying at 500 knots and on a track of 296°T, which puts it parallel to airway N571 around waypoint NILAM. Similarly, the BFO value at 18:40 is consistent with a plane flying at on a track of 180°T at about 462 knots. That means a turn to the south must have occurred during this time interval if the plane was flying at constant altitude. However, the BFO values at 18:40 also match a plane descending and maintaining a northwest track, which would imply a later turn to the south. Here we consider this possibility. In particular, we consider whether:
- The combinations of groundspeed and vertical speed required to match the BFO at 18:40 are typical of a B777 in a descent
- The variation in the BFO values recorded at 18:40 are what we would expect if MH370 was descending
BFO Values at 18:40 UTC
A log-on sequence to Inmarsat’s satellite network occurred between 18:25 and 18:28. The BTO and BFO data obtained during the log-on suggests that MH370 was flying parallel but to the right of airway N571, near waypoint NILAM. Commenter @Andrew, a former B777 pilot, advised us that in the event that an aircraft does not have clearance to fly an assigned airway, a 15-NM offset from the airway is recommended to avoid other traffic. It is therefore possible that MH370’s pilot, knowing that the transponder was inoperative, chose to fly at 15 NM to the right of N571 to avoid other traffic.
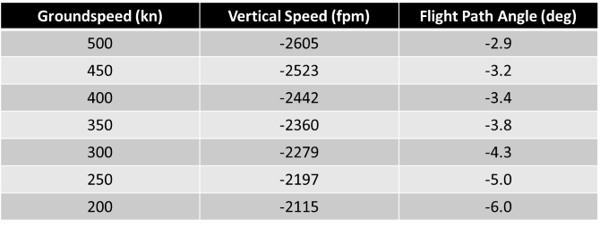
At the time of the call at 18:40, if MH370 was flying offset from N571, it would have been just past waypoint IGOGU in the Andaman Sea and flying towards the Nicobar Islands on a track of 294°T. The call at 18:40 produced 49 BFO values that were recorded over a period of about one minute. The values ranged between 86 Hz and 90 Hz, and averaged 88 Hz. Using this average value of 88 Hz, we can determine the values of groundspeed and vertical speed that would produce a BFO value of 88 Hz for a plane flying along a track of 294°T. Knowing the groundspeed (GS) and vertical speed (VS), the BFO is calculated from the equation
BFO(Hz) = 128.8 + 0.0372 GS(kn) + 0.0228 VS(fpm)
A table of selected values of groundspeed and vertical speed that result in a BFO value of 88 Hz is shown below. Also shown in the table is the calculated flight path angle (FPA), which is the negative of the descent angle, and gives some indication as to whether drag or thrust is required to maintain a particular descent rate. In general, a descent angle greater than around 3.0° will require additional drag (by deploying the spoilers, for instance), and a descent angle less than around 3.0° will require thrust from the engines. A plane gliding with a descent angle of 3.0° has a lift-to-drag ratio (L/D) of around 19. We see in the table that for groundspeed between 450 and 500 kn, the descent angle is between 2.9° and 3.2°, and the vertical speed is between -2500 and -2600 fpm. This translates to typical descent angles.
Descent Conditions to Match the BFO Values at 18:40
Automated Descent of MH370
Because the BFO varies with groundspeed and vertical speed, any variation in either of these two parameters would be represented as a variation in the BFO values that were recorded. Using the BFO equation, we find that either a ±54-knot variation in ground speed or a ±88-fpm variation would produce a ±2-Hz variation in BFO. For an automated descent, once established, it would be rare to see a 54-knot change in groundspeed over the course of a minute. However, a 88-fpm change in vertical speed is very possible, especially for descent modes in which the elevator is used to control either Mach number (M) or indicated airspeed (IAS). For this reason, we consider that MH370 was descending in an automated mode that minimizes the variation in vertical speed. In particular, we consider a “V/S” descent in which the elevator is used to maintain the selected vertical speed and the autothrottle is used to maintain the selected airspeed, i.e., the selected value of M or IAS.
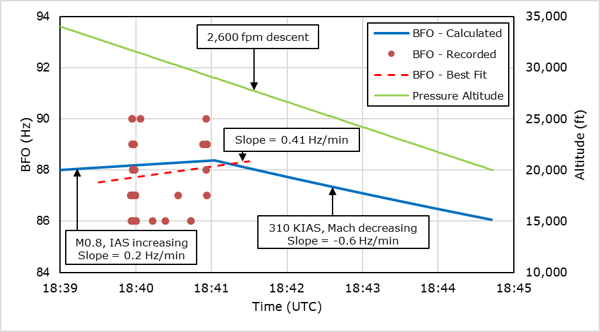
The figure below shows the calculated values of BFO for a descent in which VS=-2600 fpm is held constant and the airspeed was selected as M=0.8. The calculations assume a headwind of 3 kn, a temperature of ISA+10.8K, and a ratio of 1.06 between the geometric and pressure altitudes, which is all based on the appropriate GDAS meteorological data. The assumed descent is between FL340 to FL200, and lasts for about 5.3 min. The BFO values are calculated assuming a bias of 151 Hz, i.e., the oscillator in the SATCOM has drifted up by 1 Hz in frequency from the time it was at KLIA. This small drift allows the calculated BFO to match the measured values of BFO with a value of VS that is a multiple of 100 fpm, which is the resolution of VS that is selectable by the thumbwheel on the Mode Control Panel (MCP) of a B777. In fact, we don’t precisely know the true value of the BFO bias, but a 1-Hz drift is possible.
Calculated and measured BFO data during the descent at 18:40.
Also shown in the preceding figure are all 49 recorded values of BFO at 18:40. The best-fit line of the BFO data indicates a trend with a slope of 0.4 Hz/min, corresponding to a variation of ±0.2 Hz about the mean over that 1-minute interval, while the measured variation in BFO is ±2 Hz about the mean of 88 Hz. From this, we conclude that there is no discernable trend in the BFO data over this 1-minute interval, i.e., the BFO values do not appear to vary with time. The ±2 Hz variation in the BFO data is therefore treated as noise.
For the first two minutes of the calculated descent, the airspeed is held at a constant M=0.8, and the IAS increases during the descent from its initial value of 278 kn. As the outside air temperature increases during the descent, the true airspeed (TAS) increases, which causes the BFO to rise at a rate of 0.2 Hz/min. This corresponds to a variation of BFO of ±0.1 Hz over the 1-minute interval of the recorded BFO data. This variation is much smaller than the value of ±2 Hz due to BFO noise.
After about two minutes of descent at M0.8, the plane reaches a pressure altitude of 29,000 ft (FL290), and the airspeed has increased to 310 kn. At this speed, the autothrottle automatically changes modes and begins to maintain a constant airspeed of 310 KIAS during the descent. The Mach number also begins to fall. Increasing air density during the descent causes a reduction of true airspeed with a corresponding reduction in groundspeed, and the calculated BFO changes at a rate of -0.6 Hz/min. If the descent was timed so that BFO data was recorded during the descent at 310 KIAS, the variation in BFO due to the descent would be ±0.3 Hz. Although higher than the variation in BFO during a descent at M0.8, the variation is still much lower than the ±2 Hz due to BFO noise.
It should be noted that when 310 KIAS is displayed in the speed window of the MCP, this value represents the minimum airspeed during the descent at VS=-2600 fpm. If the airspeed falls below 310 KIAS, the autothrottle would increase the thrust to restore the airspeed to 310 KIAS. However, if the speed increases past 310 KIAS and the thrust is already at idle, the speed can only be maintained if the pilot adds drag by operating the speed brake lever. If the speed brake is not used, then the airspeed will increase past 310 KIAS. The net effect of this increase in airspeed will be to reduce the rate of BFO from falling at -0.6 Hz/min. Since we are concerned here with the variation of BFO during the descent, modeling the descent at a constant value of 310 KIAS provides a worst case estimate of this variation.
Conclusion
The timing of MH370’s final turn to the south has an important impact on the estimated end point along the 7th arc. The later the timing of the turn, the further north the end point is predicted to be. Although the BFO values at 18:40 UTC recorded during a 1-minute interval suggest the plane was flying at constant altitude and had already turned south, an alternative interpretation is the plane was still traveling northwest but was descending. Here, we find that the combination of groundspeed and vertical speed that is required to match the BFO at 18:40 also corresponds to a typical descent rate of around 3°. We also find that over the 1-minute interval, the change in BFO that is expected due to this descent is small compared to the noise in the BFO values that were recorded. An autopilot mode that minimizes the variation in BFO is V/S at -2600 fpm.
Just to correct the record from the prior thread:
If all confirmed or probable debris is considered together – and my adrift.org-powered aggregate (unconstrained) debris analysis is accurate (it is broadly corroborated by GEOMAR and ICMAT, when normalized for number of debris items analyzed), then its conclusions are inescapable:
Maldives//DG/Curtin noise event: plausible
Sumatra//IGARI/Chinese noise event: plausible
Only place the ATSB ever towfish scanned: impossible
Place the ATSB now recommends: implausible
It is perhaps not a coincidence that these four regions each get the exact same score when the topic shifts to explaining the empty shorelines in Western Australia.
If we didn’t have the signal data – but did have the debris record and two sound events – we would be debating between the sound events, and give zero weight to the deep SIO. Period.
@Dennis,
From the previous thread:
Yes, 75/25 = 3. But the mistake you made in the last post is to associate the probability of a crash with the width of the streams. What if the larger stream ‘A’ is getting narrower upstream while the smaller stream ‘B’ remains the same? What if the stream ‘B’ originates from a lake? My statement is that these streams have probability 50/50. As a result, you need to consider both of them separately, regardless whether you are using a forward or backward method.
@Victor: thank you for this work. Actual science is always helpful.
But I think here again, you are being far too critical of your own Independent Group’s search box-guiding seminal work. In particular, your description of the IG-endorsed flight path as suggestive of….
500 KGS on 296° pre-FMT, and 462 KGS on 180° post-FMT
…may be factually precise, but risks giving the false impression that a slow-down was required to fit the BFOs, when you know as well as I do that it most certainly was not. Exhibit A: none of the five paths (4 IG plus ATSB) which drove the search zone modeled any change in throttle speed or altitude at any time during or after the FMT
The reasons no speed change was ever modeled are complex, but compelling:
1) slight tail-wind pre, slight cross-wind post
2) 296 is a higher than average pre heading, which forces BFO fit to indicate a higher speed
3) 180 is a lower than average post heading, which forces BFO fit to indicate a lower speed
4) BFO errors are large enough to forbid all but BROAD ranges of speed and heading COMBINATIONS
Can I please suggest the following sentence to replace the two you chose:
“If we assume MH370 consistently maintained the cruising altitude and speed the putative radar track indicated, then the 18:28 BFO is consistent with the putative radar-tracked heading, while the 18:40 BFO is consistent with a southerly heading.”
Thanks for considering my suggestion.
I have no quarrel with the rest of your post, nor its motivation (to keep trying to reconcile the empty search box to the signal data). I think such a path proposal comes, though, with the burden of proof to explain pilot motivation for descent, and pilot motivation for reacquiring the cruising speed and altitude required to explain the remaining BTOs.
We also have the record-level implausibility of non-detection by all radar systems along this new path as a very large elephant in the room, as previously discussed – but I understand fully that, in the above note, you are merely describing a mathematically POSSIBLE path, and solving mathematically for its key parameter (descent rate required to replace heading change) – a theoretical calculation that does not need to take plausibility into consideration.
Para 2: “IG-endorsed flight path” should be “18:xx BFOs”. Apologies.
@Brock: The 180°, 462-kn possibility at 18:40 was only offered to show that without a descent, the BFO predicts a southerly path. That was neither meant to suggest a new path nor to criticize other paths. Perhaps you should ignore that example.
Are you serious? With the facts at hand, how in the world do we “prove” pilot motivation for the descent? All we can do is speculate, which I chose not to do in this post.
As for non-detection by all radar systems, the Malaysians and Thais detected MH370 after the turnback. The Indonesians and Indians did not. The Indian radar in the Andamans was known to not be operating. The radar in Sumatra was suspected to not be operating.
@Victor: there is no need to sound incredulous; my closing point about your note being focused on mathematics and not plausibility was meant to temper my observations of BOTH your (to me) bizarre flight path AND its (to me) bizarre non-detection by radar. I opened and closed with my view that understanding the science is just as important. Thank you again for focusing on the theory.
The Indonesian defence minister at the time seems to disagree with you re: Sumatra radar. A direct quote from him reported on March 19, 2014:
“I have received a report that our air defense radar system in Sabang is strong and it did not detect an airplane.”
http://m.antaranews.com/en/news/93270/indonesian-military-radar-did-not-detect-missing-airplane
Motivation of individuals is very difficult to discuss in relation to such events. My view, for what it might be worth, is that it is easy to find other humans who firmly believe things which you or I might find wholly implausible. It is very difficult to tell what information another human possesses and what decisions they might make based on it.
For this reason, I think it is very worthwhile to examine the possible geometry of the final turn and assign likelihoods to all of the possible flight paths which might fit the data. Some aspects of possible flight paths may suggest respect for FIR boundaries or radar evasion but these are speculations about motives, not facts.
If a descent is possible within the constraints of the data we have then it needs to be rigorously examined.
@VictorI
FWIW, I get close to your GS value of 0.0372 for the GS multiplier (my value 0.0370) when I use Richard’s value for the height of the satellite used by the AES Doppler compensation algorithm. When I use the value assigned by the DSTG on page 29 of “Bayesian Methods…” I get a value of 0.0398.
@VictorI
Thank you for another interesting article. Could you perhaps briefly describe what are other possible automated descent modes (other than constant VS)? I’m trying to understand how likely/common it is that this specific mode was selected.
@VictorI
From the previous thread / regarding a possible 180TT path ending around S34:
I find it hard to conclude anything from the different drift studies coming from respectable sources. For example CSIRO emphasizes the S32 – S36 area. Richard indicates closer to S30. I hope to find time to look more in depth and in detail into those studies and the methods used. For the moment I tend to accept that we should be looking south of S28
Some observations.
1. The average value of the BFO for this call was 88.
2. The average value of the BFO when the plane was parked at KLIA post the log-on sequence at 1600 UTC, was also 88.
3. Can someone explain to laymen why the BFO was 88 when the plane was stationary at 1600+ UTC while the BFO of 88 at 1840 UTC would suggest a flight on 180T and 400+ knots.
4. The BFO chart released on March 25, 2014 did not show any BFO data for 1840 or 2314 UTC.
5. The diagrams released on May 1, 2014 with the MH370 Preliminary Report also did not show any BFO data for these 2 times.
6. These diagrams showed a turn at 18:27 UTC.
7. These diagrams appeared to have been prepared by the American military, from the notations at the bottom of the diagrams.
http://www.thestar.com.my/news/nation/2014/05/01/mh370-prelim-report-cockpit-tower-recordings-released/
8. Incidentally, the BFO was 103 at 1600:23 but dropped to 86, 4 seconds later at 1600:27, when the plane was stationary at KLIA. Can someone explain to laymen what caused the BFO to drop 17 when the plane was stationary.
9. According to a sheet purportedly from SITA in one of the RMP Report folders (Folder 5 or 6), there were 2 calls from MAS ODC to MH370 at 2314/2315 UTC while the Inmarsat datalog showed only 1 call at such time.
10. The original SITA logs dated March 11, 2014 (see FI) and the original Inmarsat logs pulled on March 8, 2014 (as publicly admitted by Inmarsat) did not show any activity from 2000 UTC.
11. The list of actions taken by MAS ODC published in the first week of the plane’s disappearance, showed the ODC made several calls to the plane between 1835 to 1900 UTC (2.35 to 3.00am MYT).
http://www.chinadaily.com.cn/world/2014planemissing/2014-03/14/content_17348120.htm
12. This is the same period of time which has been redacted from the timeline set forth in Folder 4 of the RMP Report (from the table of contents, the main text and Appendix J-1).
@DennisW: I am using a satellite orbit radius of 42,586 km, which is 422 km higher than the geosynchronous orbit of 42,164 km , as advised in the DSTG report. By the way, the exact words of the DSTG report are, “The satellite altitude used in the correction is 422 km higher than the nominal 35,788.12 km value.” However, this would imply the nominal radius is 35,788.12 + 6,378.137 = 42,166.26, which is off by 2 km. I suspect they meant to say that the nominal altitude is 35,786.12 km, not 35,788.12 km.
Are you using a track of 294°T for your calculations?
@Brock, one more.
https://msdn.microsoft.com/en-us/library/windows/hardware/jj602805(v=vs.85).aspx
Speculation of possible reasons for descent at 1840
> Attempt to fall out range of Indonesian radar
> Preparing to enter holding pattern in the Andamans
> Evade air traffic coming up from behind (EK343) or ahead (if any)
> Possible repressurizaton of aircraft
@VictorI
I was using a track of 295, and a location of 7.52N and 94.42E.
@VictorI
Using a track of 294 and the DSTG SV altitude I get a value of 0.0384. Close enough not to really argue about.
Let me preface this by saying that @Andrew is the expert in the room, so I am happy to be corrected by him or anybody else. The choice of descent mode is dictated by many requirements, including whether the ATC is allowing a descent from cruise all the way down to the final altitude for the approach to the runway. A VNAV descent is probably most often used when the plane is following a flight plan because it ensures that altitude and speed restrictions are met. While that means that portions of the descent are at idle thrust and ECON or LRC speed, it also means that the speed can change to meet the altitude and speed restrictions that are imposed either by the flight plan or by ATC directives. A tailwind might also put the plane higher than the intended descent path and require a change in speed to get back on the descent path. (There is a VNAV SPD descent mode where the elevator is controlling the airspeed, but there also a VNAV PTH descent mode, where the elevator is controlling the descent path.) FLCH descent mode is similar to VNAV descent mode in that both are nominally at idle thrust. During FLCH descent, the elevator is controlling airspeed. However, FLCH descent requires the pilot to enter an airspeed, which is not required for a VNAV descent. On the other hand, a V/S descent can be chosen when it is important to hit a particular altitude at a particular time.
I chose to study the V/S descent mode because it maintains the steadiest BFO value–the vertical speed remains almost constant and the airspeed is allowed to vary some. It will also result in a smooth ride for passengers because a change in pitch to maintain speed will be perceptible in the VNAV and FLCH modes. There is also an FPA descent mode where the elevator is controlling the descent angle. Again, I believe that the V/S mode will be the smoothest and result in the steadiest BFO values. It might not be the most fuel efficient mode, though, because an efficient descent path would require decreasing V/S as the altitude (and TAS) decrease.
Perhaps @Andrew can comment on whether the MH370 pilot might have selected the V/S mode.
@DennisW: Yes, that’s a difference of only 0.6 Hz at 500 kn.
@VictorI
I like your proposal a lot. It is a very rational explanation for a late FMT which is truly needed to support more Northern terminal locations.
@sk999 said;
…”the time to go from D327I (where the plane made a right turn) to IGARI was 36:50,
whereas the flight plan calls for 35:00″…”So the actual plane took off earlier,
traveled a shorter route, yet burned more fuel than in the flight plan.”
Several thoughts for you to consider.
-comparing the aircraft position (RMP Report) Flight Plan Vs ADS-B, flight plan seems
to me to have aircraft reaching 29000 ft somewhat before the ADS-B 29000 ft actual
position (by ~20 Nm?). If I understand correctly, reaching higher altitude sooner means
sooner for the engines to begin operating in their more fuel efficient envelope. (I’ll
leave it to you to graph out comparisons for other flight levels.) In order to climb
‘higher, faster’ an aircraft should use more fuel than ‘high, slower’, so perhaps this
is not a major contributing factor to fuel use when it’s all totalled up…
-flight plan has winds listed below 29000 ft in its later pages, however the
flight plan working pages for setting out point times, fuel usage, etc. have no winds
shown until the aircraft reaches GUNBO/FL290 (~145 Nm from WMKK !)- so possibly there
was no allowance made in the plan for any winds below 29000 feet then.
Actual aircraft of course did experience winds, during the distance similar to ~145 Nm
it travelled (to get to an equivalent point, passing NorthWest abaft GUNBO).
___________
I’d be interested if you find an explanation for the ‘ACARS in the field’ position.
___________
The MH21 BFO analysis on your download docs.google page still has an incorrect link.
@Alex
I can see how a 256 second parameter for the GES datalink inactivity timer can be made
to match various timing events (allowing for timing variations in the GES logs/& AES),
but it’s a stretch to build a theory of document fabrication upon it due to a non-match
in the e.g. hourly log on/log offs.
Also, near as I can determine, Don only ever suggested the 256 seconds as a theory
– we’ll have to see if he ever found any citeable source to confirm it as a fact.
@AlexSiew said, “Incidentally, the BFO was 103 at 1600:23 but dropped to 86, 4 seconds later at 1600:27, when the plane was stationary at KLIA. Can someone explain to laymen what caused the BFO to drop 17 when the plane was stationary.”
This was explained by the ATSB as an automatic calibration procedure by the SATCOM that occurs periodically, but not more often than once every 24 hours.
If you sincerely want to understand the BFO, read one of the several papers that explain it, i.e., the June 2014 ATSB report, Inmarsat’s Oct 2014 JON article, or the Dec 2015 DSTG report. Your other BFO questions have been answered years ago.
@all,
Does anyone know if the Cost Index is used by the FMC when there is One Engine Inoperative (OEI) speed control? What I mean is, does the Cost Index scale the Mach and the Fuel Flow for the single-engine case in the same way it does in ECON mode for the two-engine case?
Boeing has pairs of tables for INOP (i.e., OEI) conditions for Mach and Fuel Flow. Actually there are two sets of INOP tables: one set is for LRC (INOP LRC) and one set is for Holding (INOP Holding). What I want to know is, does the FMC adjust the Mach in ECON OEI in the same way it does in normal ECON mode? Or do you only get the (fixed) INOP table with no scaling for Cost Index?
@Gysbreght. Overflow: final BFO plausibility.
“What would cause the airplane to pitch down more than it did in Andrew’s simulation?”
He describes that as being “envelope protected”, that is the FCS was in normal mode. The left engine had not failed.
In my scenario it had. Thence the FCS would be in secondary and the elevator would go to neutral on AC failure not, as in Andrew’s, under command for a controlled pitch down for envelope (stall) protection. Also it would have been further nose-up from loss of thrust.
You indicate the autopilot was disengaged during Andrew’s pitch down. This is belied I think by his “envelope protected” photos, though envelope protection had control in any event.
You ask, “Doesn’t the pitch damping require control of the elevator?” The AMM Elevator Control description at normal mode includes a speed stability function, to maintain trim reference speed without autopilot, and a pitch rate function for “pitch damping” from a sensor in each ACE.
Secondary has the latter but not the former. ‘Damping’ to me means it controls rate, not extent, as would the speed the stability function. Secondary also has an elevator command limiting function, for, “structural protection”.
The PFCS description groups speed stability and pitch stability within the generic term, “stability augmentation” but that does not affect the outcome.
Bear in mind too that under RAT, elevator response will be limited to its left side with that actuated by just the one PCU.
I have not reconciled any such response to its nominal retraction to neutral and leave that be.
@David:
You said: “Thence the FCS would be in secondary and the elevator would go to neutral on AC failure not, as in Andrew’s, under command for a controlled pitch down for envelope (stall) protection.”
I said: “Andrew’s simulation shows how the airplane pitches down when the autopilot cuts out near stickshaker speed.”
At that point the FCS is in secondary, the speed is close to stickshaker, but the airplane is trimmed for a much higher speed. Therefore it pitches down and accelerates towards the trim speed. “A gentle phugoid motion then developed, with the speed varying from 212 to 235 KIAS, and the rate of descent varying from 500 to 3,500 ft/min. The period of the phugoid motion was about 45 seconds.”
@Gysbreght. Your stabiliser vs elevator plot is an interesting way of comparing them thanks. The best fit (to my eye anyway) elevator trend line seems to get to about 35 secs ahead of the stabiliser through heavy stabiliser rate damping, the kinks in stabiliser slope indicating a quite reaction but of sluggish subsequent rate. On approaching its limit the stabiliser holds back further, the elevator rapidly becoming more nose up.
Three points:
1. The stabiliser apparently reached its limit and the elevator needed to supplement that i.e. the stabiliser could not meet the elevator’s ultimate ‘demand’.
2. At first glance I would have expected the 3:2 relationship to vary towards the extreme of elevator deployment, particularly operating in the combined upwash.
3.In MH370 had there been a 35 second delay and offload to stabiliser trim halted say 7 knots IAS before speed decayed to minimum manoeuvring, the elevator would have continued to make up the difference needed to keep the nose up.
Quite possibly I have missed others: I hope you will let me know if so.
Quick in place of quite please, 3rd line
@VictorI
Quiet in place of quick. 🙂
Finally had a chance to go over your ROC numbers. They hang together well just as the ground speed. Not that I doubted that they would.
@Niels
@Victor
Victor has pretty much covered the various modes that might be used for a descent. VS could be used for a descent from FL340 to FL200, but it is not a mode that is normally used for a long descent where a high rate of descent might be desired. VS is typically used for small descents, or in cases where the pilot might want to reduce the rate of descent when below the descent profile or to intercept a glideslope, for example. More typical modes would be VNAV SPD or FLCH SPD, where the elevator controls the speed, as Victor described. VNAV PTH is also a possibility, but its use would require a descent path to be defined in the FMC, such as an idle descent to commence a STAR followed by an approach to land.
@David: The answer to my question about pitch damping is simply yes. The elevator is not fixed, the PFCS continues to move it as required by the control law, including but not limited to pitch damping. At any rate, pitch damping opposes rapid pitch down that would correspond to your “final BFO plausibility”.
@DrB:
“Does anyone know if the Cost Index is used by the FMC when there is One Engine Inoperative (OEI) speed control? What I mean is, does the Cost Index scale the Mach and the Fuel Flow for the single-engine case in the same way it does in ECON mode for the two-engine case?”
The Cost Index is not used to determine the one engine inoperative speeds.
@VictorI, Andrew
Many thanks for explaining the different descent modes. Is there in the more typical descent modes a speed setting possible that maintains TAS during descent? Assuming idle thrust setting and near constant glide ratio as a function of flight level this would result in a near constant vertical speed.
Another thought: how would you descend if you are in a hurry both in terms of moving forward and moving downward; is then (given the B777 aerodynamics and operational limits) the combination of a TAS around 500 kn and a vertical speed of -2600 fpm what you could expect?
@Paul Smithson,
@Brock,
@Dennis
Here are some plots showing computed probability of the debris to end-up on the shores. A total of 37 locations along the 7th arc were screened. This set of plots corresponds to the constant leeway factor of 3.2% and drift angle of 0.0 deg.
https://www.dropbox.com/s/3gdfey2t458kphd/lw3.2-da0-2015-12-31-jpgs.zip?dl=0
About the model: A total of 50,000 particles (drifters) were included into the simulations. Source of flow data: HYCOM. Source of wind data: GDAS. The results are shown on Dec 31, 2015. Probabilities lower than 0.01% are not shown. The presented probabilities were obtained by smoothing with the normal-distribution filter with sigma = 20 km.
Note that only the section from approximately 24 to 36S appears to be consistent with the flaperon temperature profile “24-18-25″C. The peak probability for the flaperon origin constrained by the SST data is around 30S, with the estimated probability of being in the interval from 27 to 33S at approximately 85%.
More results are on the way, as well as the report itself.
Meantime comments are welcome.
@Victor,
My two cents with regard to your last article.
After I found that a standard emergency descent maneuver accurately fits BFO data, I realized that there are many standard maneuvers, which fit the data. And this is not because of the descent rate, but because of the change in TAS at constant IAS or Mach. However, there several things to consider:
1. Logic. Any maneuver has to serve some ultimate goal, whether it is avoidance of radars, avoidance of collision, approach, an emergency descent, or something else.
2. It must comply with the available radar data and its absence.
3. Fuel-related considerations. A descent may imply subsequent ascent.
4. Consistent with the absence of apparent communication with the ATC.
5. There are many combinations of lateral and vertical modes. In my understanding FPA is generally recommended for a standard approach, while V/S is the only choice if ADIRU or FMC fails. In other words, V/S could be expected if an emergency was onboard, while FPA or FLCH could be expected if the flight trajectory was pre-planned in advance.
6. One needs to keep in mind that the aircraft’s VMO and MMO may temporarily be exceeded during descent.
@Oleksandr
Beautifull work. I’m eager to see the report too.
@VictorI
Do you have an indication of when this descent could/would have started?
After 18:25, at/around 18:25, or before 18:25?
@Victor,
“This was explained by the ATSB as an automatic calibration procedure by the SATCOM that occurs periodically, but not more often than once every 24 hours.”
First of all, when and in which publication did the ATSB say that (sorry I must have missed it) and secondly what does it mean?
What would trigger the calibration (since the calibration was not upon power-up), why the need for calibration to begin with, how does one measure the 24 hour period, which of the values is deemed ‘correct’, the value before calibration or the value after calibration, how do we know the SATCOM was doing a calibration, so many questions…..
From a quick look at the Inmarsat datalog, it seems there was more than 1 ‘calibration’ in the logs. So apart from the one at 1600 UTC, there also seems to be another one at 1642 UTC. The SSU at 1642:27:988 was at 145 while the User Data ISU 10 seconds later at 1642:37:248 was at 121. The ratio of 145 to 121 is 1.19, the exact same ratio as for the ‘calibration’ at 1600 UTC (103/86). Similarly there was a drop in BFO from 172 to 144 from 18:27:08:404 to the next entry at 18:28:06:407, with also the exact same ratio of 1.19.
I do not recall seeing anything about satellite data units doing such apparently random ‘calibration’, in the AMSS manual, ARINC 741, the Honeywell SDU manual (for the MCS4200/7200 series) or the RTCA provisions.
@Andrew: Do you have a feel for how steady vertical speed would be for other modes like FPA or FLCH? The BFO would match for FPA=-3.0°, for instance.
@Niels asked, “Another thought: how would you descend if you are in a hurry both in terms of moving forward and moving downward.”
If you used FLCH to descend at 330 KIAS and applied full speed brake, it seems you would maximize both airspeed and vertical speed. It would be wasteful of fuel, though.
@VictorI
The other aspect of the descent is the subsequent apparent ascent: how, when, and why would there be an ascent? If the purpose is radar evasion, one would think the lower altitude might be maintained for the flight south, at least the initial portion.
@Oleksandr: Some comments to your comments:
1. Yes, the plane descended for a reason. As people here know, I lean towards the guilt of the captain, so I don’t put a lot of weight on explaining the descent with a scenario involving a failure. If the pilot intended to loiter before he turned south, the descent might have been related to lowering fuel flow by holding at FL200.
2. We don’t know what radar stations were operational. Without that knowledge, it is hard to conclude much from the lack of detection.
3. Yes, a climb would follow the descent, perhaps after some time has elapsed. The extra fuel required for the climb would tend to balance the fuel saved during the descent.
4. As I said, I believe this was an intentional diversion, which is consistent with no radio voice communication with ATC and no transponder.
5. I’d say more generally that V/S is used to reduce or increase the descent rate compared to an idle descent. And yes, there are many modes that satisfy the instantaneous value of BFO at 18:40. But I was also interested in finding a mode in which the BFO value did not significantly change over the course of 1 minute, which is the interval of the 18:40 BFO data.
6. Yes, Vmo or Mmo might be temporarily exceeded without dire consequences to the airframe. In V/S mode, a pilot could apply drag or reduce the selected vertical speed to remain below Vmo.
@TBill: If the purpose was to evade military radar, I don’t think it would have practically flown over the Butterworth Air Base.
@Oleksandr
I’m missing the coördinates of the 7th arc plots with each grahpic.
Am I overlooking them? If not it would be helpfull if they where added to each graphic too. Maybe it’s also an idea to project the 7th arc in also with the plot-point per graphic made visible.
And in between.. this is not just work, this must have been a project..
Impressive..
@Ge Rijn: The BFO at 18:28 is consistent with no descent at that time. We are postulating, based on the BFO data, that the plane was descending at 18:40, and probably started the descent at around 18:38.
@AlexSiew: Mike Exner submitted a question to the ATSB about the 17-Hz drop in BFO seen just after the 16:00 log-on event. The ATSB responded that there is an automatic SDU calibration process to correct the long-term OCXO drift. This calibration is performed after logging-on and, if necessary, an adjustment is made. For an adjustment to be made, one hour must have elapsed since power on, and 26 hours of on-time must have elapsed since the last adjustment.
@Ge Rijn the coordinates make up the file name for each plot of @Oleksandr’s debris probability plots.
All:
Re calibration OCXO offset at 16:00 UTC
ATSB SWG (Oct 2015 email): “There is an automatic SDU calibration process to correct log-term OCXO drift. Analysis of the GES logs from 9M-MRO from 04/03/14 to 08/03/14 shows three such probable calibration events at: 04/03/14 11:43:32 (-15Hz), 06/03/14 00:35:25 (+16Hz) and 07/03/14 16:00:28 (-17Hz). The actual adjustments will have been +/-16Hz, and these three calibrations appear to show a system adjusting around nominal as seen in SDU logs from other aircraft. This calibration is performed after logging-on and, if necessary an adjustment is made. For an adjustment to be made, one hour must have elapsed since power on, and 26 hours of on-time must have elapsed since the last adjustment. It is not possible to know from the GES logs, when and for how long, the SDU on board 9M-MRO had been powered on prior to flight MH370.”
Actually, we later learned that the SDU was powered on for several hours before 16:00.
The following is of particular importance to the BFO accuracy/drift discussion: “…these three calibrations appear to show a system adjusting around nominal…”. What this indicates is that the OCXO had very little medium or long term drift. The minimum offset adjustment (lsb value) is 16 Hz. Over the previous several days, the adjustments were flipping back and forth by 1 lsb. That indicates to me that there was very little drift during the MH370 flight.
@MH
Thank you. I now see it. It’s not shown in my file names but in the upper left corner of my Windows viewer.
@ALSM
“The minimum offset adjustment (lsb value) is 16 Hz. Over the previous several days, the adjustments were flipping back and forth by 1 lsb. That indicates to me that there was very little drift during the MH370 flight.”
One hertz of drift at the OCXO frequency produces more that 100Hz of drift at L1. Your statement is pure nonsense.
@DennisW
Isn’t a typical OXCO frequency drift over many hours in the 1 – 10 ppb range? So where is the 100 Hz coming from?
..OCXO..
@DennisW,
I have been following the MH370 on various web sites and blogs right from the beginning and have rarely posted something as I don’t have the technical knowledge that you guys have to help on the various matters that are discussed.
But I must say that, here and there on others sites, you often have a pretty agressive “voice” on some other’s position or statements rather than debating or exposing quietly your point of view. And here again !
Sorry to say and to read your last post ! Rather than taking a “pure non sense” position on ASLM’s position, why don’t your expose your reasons and really clearly explain/demonstrate why you believe so in order to be really constructive and not loose bandwith that Victor is nicely giving you, with such an “empty” post ?
Mike may or will understand your statement but not all of us here !
Dennis:
It is your statement that is pure nonsense. The adjustments are relative to the transmit carrier frequency (1.6 GHz), not the OCXO frequency (10 MHz). This is known from the record, but even if it was not, it is obvious on its face. If they were referring to the OCXO frequency, then the adjustment resolution would have an LSB value of 2600 Hz at L band, which is ridiculous if the requirement is to be within ~200 Hz of the center frequency at all times.
@ALSM
Yes, I understand the correction LSB refers to L-band. I am referring to temperature effects not aging. Why do you ignoring this data?
http://tmex1.blogspot.com
@ALSM
Out of curiosity: is the offset adjustment such that other SDU’s (in other aircraft) have a very similar fbias, so how unique is (near) 150 Hz fbias for 9M-MRO?
@Victor
I agree with you that there was no apparent attempt to evade Malaysian radar, but once out of Malaysia radar range I assume disguising FMT from Indonesia radar might have been a consideration for the descent. Even if Indonesia had a few radar blips, if there was a loiter in the Andamans, they might not realize the westbound blip at 1840 and the later south bound blips after 1840 were the same aircraft, if that’s the way it happened.
@TBill: My guess is there was an attempt to avoid Indonesian airspace to reduce the chance of an intercept. Perhaps the pilot felt safer in Indian airspace. A desire to evade Indonesian radar might have also been part of it.
@Ge Rijn,
This is only a small fraction of what drift analysis can tell. Now I have a model, so I can experiment with whatever settings I want. My initial interest was whether there are such locations of the origins, which can results in the temperature profiles matching the one derived by Prof. De Deckker from his barnacle analysis. The answer is positive. I am currently experimenting with random leeway factors and drift angles.
The coordinates of origins are included into the filenames. I should have duplicated these in the plots as you suggested.
As Paul Smithson lives in Tanzania, and furthermore he already found small debris not far from where my models predict, I think he may try 50-100 km south of the location where he already searches, if this is feasible. Of course, Madagascar’s east coast seem to be the best place to search. I found it also interesting that my model shows possibility of debris in Sri Lanka. Remains to be seen.
@Victor,
Re: “If the pilot intended to loiter before he turned south, the descent might have been related to lowering fuel flow by holding at FL200.”
Why FL200? I am asking this because a few versions of my ATT flight models converge to approximately FL200 after the descent (and keep this level till the end), but logic-wise I would expect FL100 to be a more reasonable choice. What is special about FL200?
@Oleksandr: If you look at the table for fuel flow for “Holding Flaps Up”, for the expected weight of around 208 MT, fuel flow is minimized at FL200.
@Louis
ALSM and I have been debating the accuracy of the BFO data going on three years now. His post was nothing more than a fanning of old embers. This argument is neither new nor unknown to long timers. I cannot take the time to post a history every time ALSM comes up with an off-handed reference to his belief that the BFO data is accurate to low single digit Hertz. The publication of the 9M-MRO flight historical data by the DSTG, and their computation of a one sigma value of ~5Hz BFO variation is very clear. It means that about one out of three BFO measurements are in error by more than 5Hz. It is also not clear if the DSTG computed the variance values relative to the bias computed before each flight or whether they computed the variance of the data in aggregate. I suspect the former.
@Niels
The DSTG BFO data from the prior 20 flights of 9M-MRO speaks for itself.
@Ge Rijn,
It seems to me from @Oleksandr’s debris drift probability plots, the ones starting along latitudes that of Exmouth/ Learmouth seem to hit the locations where actual debris were found. Seems interesting. Can wait for further information to be released from @Oleksandr…
@DennisW
Would be nice if indeed the BFO (error) data from the prior 20 flights would be known.We mainly have the histogram, while the errors vs. time of all 20 flights would be needed to better charaterize the drift behavior.
I don’t think it is very little, nor that it will be anywhere near 1 Hz on 10 MHz.
@Oleksandr. I’m no longer in TZ full time, I’m afraid. Nor was I debris-searching intensively, merely doing some incidental searching in areas close to my stamping ground.
You are correct – the south east coast of Mafia Island around Jibondo channel/island, Kua island is exactly where things (including fishermen adrift in disabled boats) fetch up if they start in the Comores area – and in turn should attract flotsam coming over the top of Madagascar. However, this will doubtless be highly seasonal. Between May and September the south-east monsoon wind is blowing and the north-going surface current is accelerated. After a brief transition the wind switches to NE monsoon December-March. This also weakens the ocean surface current.
The separation of the South Equatorial Current occurs at around Cabo Delgado on the TZ-MZ border (the latitude of separation zone moves a little according to monsoon). Anywhere north of there, the current flows north (all the way to Somalia). Anywhere south of there it goes south. The Moz Channel, as you are no doubt aware, is full of semi-fixed and variable eddies, but still the prevailing current flows south on the Mozambique side, ultimately joining up with the flow around the south of Madagascar to become the Agulhas current.
In my own view, it is unlikely that flotsam coming across the northern end of Madagascar could reach the coast far enough south to catch a ride on the south-going current. So it is my belief that debris found in southern Mz channel and South Africa must have passed south of Madagascar.
Finally, since you have your shiny new drift model working, could I ask you to run a hypothetical? What happens to particles that start their journey on 8th March 2014 at 44.5S 89E? My guess is that 2/3 or 3/4 of them carry on past the south of Aus on the circumpolar current, while a few diverge north and enter the SIO gyre.
@Olexander — Wow, a lot to digest in your drift models. Not surprising to see likelihood of debris in WA as far north as 37S. But the hot zones you see for Sri Lanka for the gamut from 38S to 31N is a bit puzzling — particular the concentrations along the western and southern coasts, with plenty of sandy tourist beaches, debris should have been located by now, yes?
Compared with Prof. Chattiaratchi’s model [posted by Victor a couple of threads earlier], I see in C’s model more concentrated clusters in the big bights along the Tanzanian and Mozambique coasts, a big cluster in the Comoros, and essentially no hits on the southern half of the east coast of Madagascar. [Whereas, your model for the entire ranges of origins shows about equal heat along the entire coast, much higher than anywhere else, in fact.] And no Sri Lanka in Cs model [one presumes, since the map cuts off]. He seems to give a bit more likelihood for recovery at the Mossel Bay latitude in SA as well.
I wonder if your model assumes landfall to be a function of proximity only, or if it incorporates depositional versus non-depositional shorelines? [The clustering in Cs model only makes sense if he is weighting this factor. Again, if proximity = landfall in a model, the SA localities could be seen as rapid movement just off shore, and probably as reworking following first landfall [as documented for the RR piece, I believe.
So, exciting, but also disappointing. I don’t see any 40km radius origins coming out of your models!
@Victor:
@Andrew: Do you have a feel for how steady vertical speed would be for other modes like FPA or FLCH? The BFO would match for FPA=-3.0°, for instance.
FPA maintains a reasonably constant vertical speed over short periods, say 1-2 minutes. Over the longer term, the vertical speed will slowly decrease to keep the FPA constant as the TAS decreases during the descent. FPA is rarely used in line flying, except when flying the final segment of an instrument approach in cases where VNAV guidance is not available. Pilots would not normally use FPA to fly a descent from high level.
In FLCH, the vertical speed can change markedly over short periods, especially if there is a sudden change in the wind as the aircraft descends. The vertical speed is higher during the initial part of the descent, where the aircraft is maintaining a constant Mach and the IAS is increasing. The vertical speed then reduces once the speed reaches the Mach/IAS crossover and the aircraft starts maintaining a constant IAS.
The whole of the ATSB email makes no sense but none more so than the last sentence to the effect that it was not possible to know from the GES logs how long the SDU had been powered on.
Just by the last sentence, we know that the ATSB, even as late as October 2015 (the date of the email) did not have the full logs for March 7, 2014 UTC for 9M-MRO and was merely repeating, in all likelihood verbatim, what some others were telling them. It also shows that either the ATSB was incapable of or disallowed from asking even the most basic of questions “how can we not know from the GES logs when the SDU powered on since the SDU is designed to log on upon power up [an initial log on] and the GES logs would show the first initial log-on which can be corroborated with the time of the plane/AES powering-up” or the ATSB was complicit in the obfuscation that has been going on since day 1.
This is not the first time the ATSB has been shown to be clueless. So in a December 2014 update where the 2 lines showing back to back log-ons 1 second apart were inserted into the Inmarsat datalog, the ATSB thought the power up was just before these 2 purported log-ons ie just prior to 1600 UTC (as did all non-insiders). It took until March 2015 before the ‘authorities’ revealed in the F1, that the plane and the AES had powered up several hours earlier at around 1250 UTC.
In another update (the date escapes me now), the ATSB held out the 1803 UTC message from MAS ODC to the plane (for the crew to call Saigon ATC) as an interrogation from the GES to the AES. Again, the ATSB was either completely clueless or was complicit in disseminating false information. The cumulative evidence shows it is likely the former, clueless and powerless.
There is no such thing as an SDU calibrating at random times for ‘OCXO drift’. For those who say there is such thing, please provide the documentation to back it up. Documentation published prior to March 7, 2014 UTC time.
How long more are people going to accept at face value the ridiculous statements emanating from the authorities? Like the one about the EAFC only capable of partial compensation of the Doppler from the satellite to the GES? Inmarsat had a complete overhaul of the Classic Aero system and infrastructure in 2013, with new dual ground earth stations in Perth, all designed and tested by SED/Square Peg.
Or the false statement, repeated in all MH370 publications, that the AES/SDU assumes the satellite is stationary in a fixed orbital position (at 0 degree N)? The false statement underpinning all this BFO theory.
@Andrew: I can model the underlying physics and predict how the vertical speeds ideally vary under various conditions of constant M, constant IAS, constant FPA, etc. That’s what I did in the graph above. What I can’t model (nor do I trust FSX to model) is how well the A/P is able to hold M, IAS, VS, or FPA to a steady value under typical atmospheric conditions. Let’s suppose conditions are ideal, i.e., light and steady winds with little or no turbulence. Would you expect a jitter of ±50 fpm superimposed upon the steady trend?
@AlexSiew: It’s no secret that Malaysia does not share all of its data with the ATSB.
You cannot make blanket statements such as “There is no such thing as an SDU calibrating at random times for ‘OCXO drift’.” ICAO requires that the AES has to meet certain requirements regarding frequency error. A vendor might choose to meet this requirement by implementing a self-calibration routine that is not described in a public document. It might be information proprietary to Honeywell Thales that was provided to Inmarsat and the ATSB, and not subject to control by Malaysia.
I assume you are located either in Malaysia or in a neighboring country. Have you made any requests to Malaysia for additional information, such as the raw radar data or additional satellite data? If you could help obtain additional information from Malaysia, that would be helpful to all of us.
@Victor:
Would you expect a jitter of ±50 fpm superimposed upon the steady trend?
Yes, I think that would be a reasonable assumption for VS or FPA modes.
@Victor,
Questions on the satellite data should be directed to the source, Inmarsat. The Malaysians wouldn’t know the difference between an R channel and a P channel. In April and May, 2014 when the world was asking for the satellite data, Malaysia had no problem consenting to the release but it was Inmarsat which was obstructive, and when the Inmarsat datalog was released on the 27th May, it was severely redacted. Does anyone in their right sense of mind really believe the redaction was done by the Malaysians? Does anyone really believe it is the Malaysians who have been feeding the ATSB with all these updates to the data and purported analysis?
This whole narrative has been driven by non-Malaysians. The statement read out by the Malaysian PM on March 15, 2014 and March 25, 2014 were drafted by the ‘international team’. Have a look at what Chris McLaughlin said in Sept 2014 in the PR magazine, about the role the UK COBRA committee played in the March 25, 2014 statement.
In the latest DSTG paper, the author Ian Holland listed the members of the MH370 Flight Path Reconstruction Group: DSTG, Inmarsat, Thales, Boeing, US NTSB, UK AAIB, Honeywell, SED, Square Peg, Panasonic and ATSB (the stated leader of the group). No mention of any involvement by any Malaysian agency, which is to be expected as the Malaysians would not have the expertise to contribute.
If any member of this Group for eg the ATSB was deprived of any data, it would be by design of some other member or members of the Group. If the ATSB does not have the full satellite logs, it would be because Inmarsat and those who are in a position to dictate to Inmarsat, have seen fit not to give ATSB access to the data.
As for the Malaysian radar data, surely those responsible for putting out the various folders of the purported secret RMP Report, have a recording of the data since this DVD recording was part of the Report? So why didn’t these people release the recording when they disseminated the Report? Perhaps for the same reason part of the timeline (from 2.30 to 3.00am) was redacted from the Report.
@Oleksandr
Like @Ikr also mentions I think it’s quite odd the probability on Sri Lanka and the Andamans is high starting from the ~38S latitude then fades away and vanishes going North then returns strongly after ~19S with also the Sumatra shores affected.
The latter (North of ~19S) is completely expected (by me) and in line with the rest of all outcomes from your model IMO.
But the high probability at ~38S on Sri Lanka and the Andamans slowly fading till ~27S and after this vanishing is very out line with the logical pattern/trend the rest of your outcomes show.
I’m eager to read your explanation on this.
@Victor, re: “passed near NW Point at 1912”:
This point was included in the ATSB’s June, 2014 report within a list of (dubious) reasons for relocating its search to the Wallaby Plateau at 21S.
Accordingly, they are citing it as something which drove their modeled intersection of the 19:41 Arc to a point significantly more to the NORTH than originally assumed. (This is the exact same logic you and Richard are using to push your 19:41 intersection northward, in an attempt to justify searching more northerly points on Arc7.)
The only way a desire for “radar clearance” could push their modeled 19:41 intersection North is if they were to decide modeling the plane turning south sooner caused them NOT to achieve the requisite clearance.
Thus “clearance” had to have been to radar installations located to the SE.
For instance, that coordinate seems to line up reasonably well with the concept of clearance from Sabang at ~FL(300).
For the record: I’m not for a moment DEFENDING the ATSB’s logic – as was demonstrated in my audit, this was ludicrous reasoning, and we have good reason to suspect EVERY item on that list was spaghetti-against-the-wall CYA BS, to rationalize searching much closer to port.
I’m just pointing out that, logically, they could not possibly have been referring to radar clearance from sites to the West – aloft or otherwise – or it would have been a reason NOT to move to the Wallaby plateau, and would have undercut their own argument.
@Oleksandr @Ikr
I like to say while your efforts or not likely to pinpoint an area of ~40km radius I regard your results are not disappointing. Such an outcome would be too much asked of any individual drift study.
I think the value of your approach and results add to the outcomes of other studies like @ Richard’s and Chattiarachi. And put together have the potential of pinpointing a smaller most probable area.
Your model also shows landfall North of 36S on Australian shores does not occure anymore.
This is completely in line with the conclusions I made based on @MPat’s drifter based study back in 2015. So ofcourse I’m delighted to see another indication which confirms this observations.
The conclusion I made then was South of ~36S drifters landed on Australian shores in this study so debris also should have landed.
This did not happen (no proof till now).
North of 36S no drifters reached Australian shores.
To me this was a clear indication back then the search area South of 36S had to be wrong. Your model shows the same.
The towel you still mention is therefore also excluded by your model too.
Another indication this towel could not have come from MH370.
Which was not provable by any means anyway.
I await your report. The most pranging questions for me now are about the Sri Lanka an Andamans high probabilities.
@all. I had not revisited the “possible routes” depicted in the preliminary report (posted by Alex S) for many moons. http://www.thestar.com.my/news/nation/2014/05/01/mh370-prelim-report-cockpit-tower-recordings-released/
On seeing it again, I wonder what is the reason for the jink NW after Mekar and before the FMT in all of these scenarios? The only reason that I can think of is to create a more oblique crossing of the BTO “contours” at 1825-1828. Is there any other reason why at this point in the guessing game they should have started all of their paths south from a point that is well north of the track indicated by “last military radar”?
@Paul Smithson asked, “I wonder what is the reason for the jink NW after Mekar and before the FMT in all of these scenarios?”
Starting from the last radar point at 18:22, I believe the turn towards the NW was required to hit the ping arc suggested by the 18:27:04 BTO value of 12560 μs.
@Brock: The belief that “The aircraft passed close to a NW point at 1912” as stated in the ATSB’s June 2014 report as guiding thinking in April 2014 was later proven false. The statement later provided to @Niels referring to clearance from a radar source is now believed to be more accurate.
The search zone was not moved due to radar clearance. “Appendix A: Information used in determining and refining search areas” on page 46 gives the reasons why the search zone was moved in April 2014. It also gives the reasons it moved again in June 2014. The April 2014 search zone was based on an unrefined BFO model that did not properly reflect the eclipse of the satellite and the partial EAFC compensation of the pilot receiver at the GES in Perth.
@AlexSiew: You can twist the facts all you want. The Malaysians have the raw radar data set and it is their decision to withhold it from the public. I asked for your help getting it. Either you are unable or unwilling to do so. I’ve tried requesting radar information directly from Malaysia and was incorrectly told that radar questions would be answered in the March 2016 update. I’ve also requested the radar data from the ATSB and was informed that Malaysia has denied my request.
The Malaysians also own the satellite data. Whether or not they have the capabilities to analyze it is not the question. Malaysia can request the satellite data from Inmarsat and SITA and release it.
@Brock said, “This is the exact same logic you and Richard are using to push your 19:41 intersection northward, in an attempt to justify searching more northerly points on Arc7.”
To be clear, I am not attempting to justify searching further north on the 7th arc. I’m not even convinced that the plane was descending at 18:40. I am trying, like many others here, to reconcile all the data we now have to estimate where the plane is. In fact, based on what we know today, I would recommend that we don’t yet search. That recommendation is subject to change.
@Andrew,
I understand you are a Boeing 777 pilot.
Do you know or are you able to make some educated guess as to why the plane had powered up 4 hours prior to takeoff?
Is it common for a plane to power up so many hours prior to takeoff?
Also can I ask a technical question, can the RAT on the Boeing 777 deploy in the event of total electrical failure? In other words, can the RAT be manually deployed (for eg by pulling or pushing something), even if there is no longer any power at all?
@Andrew
Alex has a good question, for your background, 9M-MRO was on these days conducting back-to-back round trips to Beijing. So on 7-March-2014 , 9M-MRO would have returned from Beijing approx. 3:30PM according to the schedule (I guess we should look at Flight Aware for actual arrival time). By the way it was not the same pilots on the 7-March round-trip (obviously).
Upon return to KLIA (WMKK) airport on March 7 from Beijing, one thing that happened was the Crew Oxygen cylinder was topped off from just under 1200 psig to 1850 psig. Apparently MAS had a 1200 psig fill-up policy.
I find it a little suspicious that the O2 was topped off just before MH370 flight, but on the surface it appears normal. I’d have to argue some hypothetical conspirator (pilot?) let down the pressure to force the fill-up.
PS- MH370 departs for Beijing around 30 min past midnite so it would have been on the ground about 8-hours between flights.
@Victor: saying Appendix A also included reasons for moving the search back south again is accurate, but risks misleading readers, because you know as well as I do that the “NW point” claim was listed as a consideration in the column, “02 -28 April 2014 / Second Refinement to Search / S4/S5 starting at S4/S5 boundary and defined by red/ yellow/green areas”. It was listed as a factor in determining the odious “red/yellow/green” zone – the Wallaby Plateau region in which the infamous “FDR pings” were immediately found.
The reasons for moving back clockwise – a list which omitted any reference to the NW point – were given in the next column over, as you well know. So my point stands unchallenged: by citing it in a list of factors which together moved the search counterclockwise, the ATSB logically had to have been claiming to need clearance from radar installations to the SE.
The S21 location conflicted with far more than an “un-eclipsed” BFO model. No path whose implausibly low speed and implausibly curling path cancel perfectly by fluke has ever been considered plausible by any credible analyst. Even if the FMT was delayed to 19:12, we still need this bizarre BTO fluke to get impact all the way up to where the SSWG seemed determined to search.
I am glad you are circumspect about the plausibility of these new paths. The “NW point” observation was for me just a sidebar: I’ve been overlaying your/Richard’s paths against known and putative radar coverage from Sabang, Port Blair, Cocos Islands, and JORN, and consider the possibility of “0-for-4” somewhat remote.
I hope this means you will soon join me in publicly calling out the SSWG for the many well-documented gaps between their decisions, and what their own data suggests. The NoK deserve closure, and I suspect you agree that our time would be far more productively spent demanding and securing the fullsome release of hoarded fuel/performance, FDR ping, signal, drift, and buoyancy data. As you know, I have felt this way for some time. I could really use your support.
I hope you never take my exasperation personally. We’ve been dragged from the SCS to the GoT, then south of Arc7 at 40S, then to 30S, then to 20S, then to 30S again, then to 40S again…and now to 30S a third time. Each time, folks asked me to trust them – they had new analysis that sorted things out. Despite, in multiple instances, clear counter-evidence staring us all in the face.
It makes me skeptical of all new recommendations – and white-hot with rage, frankly, that we’ve not yet managed to band together to demand a rigorous public audit of the whole mess.
@Alex Siew:
Yes, the aircraft are normally left powered-up between flights, via the APU or external power. They are usually only de-powered during long overnight transits where no maintenance is required.
The RAT requires 28V DC power from either the Hot Battery Bus or the APU Battery Bus to unlock the actuator via the RAT switch on the overhead panel. Once unlocked, a spring within the actuator forces the RAT to extend. The RAT should extend automatically as soon as both transfer buses lose AC power, well before the batteries go flat.
@TBill:
See above.
“I find it a little suspicious that the O2 was topped off just before MH370 flight, but on the surface it appears normal. I’d have to argue some hypothetical conspirator (pilot?) let down the pressure to force the fill-up.”
There is a small amount of leakage from the crew oxygen system even when the system is not in use. In addition, the system deliberately vents oxygen for a short time after each engine start. It is not at all unusual for the oxygen system to require a top-up every now and then. Mick Gilbert studied the oxygen replenishment history, but I can’t remember the details off the top of my head.
@Victor
“To be clear, I am not attempting to justify searching further north on the 7th arc. I’m not even convinced that the plane was descending at 18:40. I am trying, like many others here, to reconcile all the data we now have to estimate where the plane is.”
Among the data we have is the ignored (by the purists) motivational factors. If Z wanted to drop a plane into the SIO, a flight West to Europe or Jeddah would have been a much more logical choice. The diversion had to be based on other considerations – March 8, negotiations, loiter …???
The simulator data also plays a role here. Not to mention Z’s relationship with the opposition party and Fatima Pardi. The phone call just prior to take off??
Then there is the debris and barnacle forensics.
The late FMT by way of a descent at 18:40 fits very well into a broader pattern of observables and reasonable speculation. A suicide flight or mechanical failure leading to the SIO was, for me, a non-starter from the get-go despite the IG/Steel Occam’s Razor.
Is it convincing enough to trigger resumption of the search? Probably not. We may never reach that threshold. However, it does fit a plausible scenario very well.
@DennisW: As you know, I have dug into the simulator data probably deeper than anybody, with the expert help of Yves Guillaume. I think it is likely that the captain diverted the plane. I think that the scenario you propose is the most likely, and I can’t propose one better. There are none-the-less many hanging threads, and I continue to either fill the holes of this theory, or find a better one, with the expectation that we can recommend a place to search with a reasonable level of success. We’re not there yet, and perhaps never will be, as you say.
@Brock: Please show me where in the ATSB report it says the search area in April 2014 was based on clearance from a radar source. That narrative came later. In April 2014, the ATSB said it believed that MH370 passed near the NW point. Evidently, the ATSB gained additional information about this radar information, and concluded that rather than a capture, it represented a “non-capture” from a known radar source, which we now believe was an asset of Singapore and was a mobile radar source.
@Brock McEwen
I know you are very critical about the search in the “S21” area, but as a matter of fact the provenance of the acoustic pings detected there has never been properly explained. Based on my own investigations and confirmed by contacts with a specialist, the explanation that they originated from tagged marine animals is unlikely at the frequencies detected and the location of detection. Acoustic tags are mainly being used in costal areas because of the short detection range, and if being used (in recent years) not at these frequencies. Alternative sources could be echo-sounders or fishery sonar, however one may assume that the ADV Ocean Shield crew would be aware of nearby ships.
For those interested two links to videos showing ongoing analysis of detected signals:
https://www.dropbox.com/s/112noyoothfuhoa/08.04.2014_Pinger_mp4hd_main.mp4?dl=0
https://www.dropbox.com/s/qu8ql8187aspv6a/09.04.2014_Pinger_mp4hd.mp4?dl=0
Furthermore it is a misconception that you could only get there by a curved flight path. There are paths with a few turns that fit to both BTO and BFO. I agree that these require speed changes, which makes them perhaps less likely than near straight, near constant speed paths.
Note that based on the recent drift studies one has to accept the fact that S21 is a very unlikely crash location for MH370, so the discussion about this area has perhaps become a bit academic. Nevertheless, and in that I agree with you, the search in this area is a part of the whole MH370 story that cannot be ignored and should be well explained and understood in all its aspects.
@Andrew
I am aware of Mick’s work, yes he has the thought that fill-up to 1850 psig came too soon after too few flights to explain the pressure loss. But it was a good number of flights since the prior fill-up, so it’s hard to say. Clearly if we had a running history of 9M-MRO cylinder pressure each flight, we’d be in better shape to speculate.
@Niels: great to hear from you. If you agree search leadership must be held accountable for all decisions taken, I certainly won’t quibble with you about whether the pings that gave PM Abbott such supreme confidence came from whales, Ocean Shield’s bar fridge, or door #3. We are on the same team.
And yes, by “curved path”, I refer to the much broader “family of paths whose intersections with the BTO arcs all coincide with those of a path which has a precisely trigonometric curl which cannot be explained by any combination of flight mode, wind or Coriolis effect”. I call this nonsensical set “curving paths” because it is shorter.
@Victor: re: “Please show me where in the ATSB report it says the search area in April 2014 was based on clearance from a radar source.”:
From page 6: “On 1 April (D25) the JIT advised AMSA/ ATSB of further aircraft performance and path analysis starting at a distance further NW of Sumatra that had the effect of shifting the most probable area NE within S4 and into S5. Probable impact areas red, yellow and green were defined within S4/S5 (Figure 5).”
Appendix A further describes this advice as suggesting the aircraft “passed a NW point at 1912”.
The ATSB’s response to Niels clarifying this said, “the NW point at 1912 was an assumed theoretical location at 8° 35.719’N, 92° 35.145’E initially chosen to provide clearance from the known radar sources (mainly Singapore)”.
The only way those three statements don’t add up to “we moved the search box NE because the JIT pushed our start point NW due to radar clearance considerations” is if deception is if one or more of those statements was worded deceptively. Perhaps the ATSB was being deceptive – we’ve certainly recorded evidence of this elsewhere – but I for one try not to accuse anyone of deliberately misleading us unless I have direct evidence. The above statements, when given their most reasonable interpretation, point to a very different conclusion than the one you’ve drawn.
I’ve written the ATSB, seeking further clarification. There is no need for either of us to speculate, when the ATSB has the answer at hand. I’ve cc’d you on my question, and will happily pass on their response.
@Niels: great to hear from you. If you agree search leadership must be held accountable for all decisions taken, I certainly won’t quibble with you about whether the pings that gave PM Abbott such supreme confidence came from whales, Ocean Shield’s bar fridge, or door #3. We are on the same team.
And yes, by “curved path”, I refer to the much broader “family of paths whose intersections with the BTO arcs all coincide with those of a path which has a precisely trigonometric curl which cannot be explained by any combination of flight mode, wind or Coriolis effect”. I call this nonsensical set “curving paths” because it is shorter.
@Victor: re: “Please show me where in the ATSB report it says the search area in April 2014 was based on clearance from a radar source.”:
From page 6: “On 1 April (D25) the JIT advised AMSA/ ATSB of further aircraft performance and path analysis starting at a distance further NW of Sumatra that had the effect of shifting the most probable area NE within S4 and into S5. Probable impact areas red, yellow and green were defined within S4/S5 (Figure 5).”
Appendix A further describes this advice as suggesting the aircraft “passed a NW point at 1912”.
The ATSB’s response to Niels clarifying this said, “the NW point at 1912 was an assumed theoretical location at 8° 35.719’N, 92° 35.145’E initially chosen to provide clearance from the known radar sources (mainly Singapore)”.
The only way those three statements don’t add up to “we moved the search box NE because the JIT pushed our start point NW due to radar clearance considerations” is if one or more of those statements was worded deceptively. Perhaps the ATSB was being deceptive – we’ve certainly recorded evidence of this elsewhere – but I for one try not to accuse anyone of deliberately misleading us unless I have direct evidence. The above statements, when given their most reasonable interpretation, point to a very different conclusion than the one you’ve drawn.
I’ve written the ATSB, seeking further clarification. There is no need for either of us to speculate, when the ATSB has the answer at hand. I’ve cc’d you on my question, and will happily pass on their response.
@Paul Smithson,
It is somewhat disappointing that you no longer be able to verify predictions of my model… Of course, the best place to search is the eastern coast of Madagascar.
Re: “However, this will doubtless be highly seasonal. Between May and September the south-east monsoon wind is blowing and the north-going surface current is accelerated. After a brief transition the wind switches to NE monsoon December-March. This also weakens the ocean surface current.”
The model I’m working with takes these effects into consideration. At least in theory. Of course, any model is only idealized representation of the complex reality, in addition spoilt by numerical errors.
Re: “In my own view, it is unlikely that flotsam coming across the northern end of Madagascar could reach the coast far enough south to catch a ride on the south-going current. So it is my belief that debris found in southern Mz channel and South Africa must have passed south of Madagascar.”
It looks like there is a separation of the debris cloud: one fraction passes by the southern tip of Madagascar, the other one, smaller – the northern. Considerable fraction was still trapped in the middle of SIO by the end of 2015. In other words, the debris found in southern Mz channel and South Africa have passed south of Madagascar, while the debris found in Tanzania – the north of Madagascar.
Re: “What happens to particles that start their journey on 8th March 2014 at 44.5S 89E? My guess is that 2/3 or 3/4 of them carry on past the south of Aus on the circumpolar current, while a few diverge north and enter the SIO gyre.”
It turns out that a very tiny fraction enters SIO gyre, perhaps 1% or so. I did not do exact calculations. Here is a plot of particles cloud on July 02, 2014:
https://www.dropbox.com/s/msqk25wsl6zhay6/89.00E_44.50S_lw3.2_da0.0_2014_07_02.jpg?dl=0
By the end of 2015 almost nothing stays in the shown domain, except the fragments landed along the southern Australian coast. No particle (=drifter) of 50,000 included into my simulation hit Reunion or Mauritius.
@Ge Rijn,
My response to you have disappeared, so if it does re-appear, I will repost it.
@Oleksandr
Sorry to add more unpredictability. Did you include Cyclone Gillian into this SIO debris drift (approx 1%) going into the Gyre?
@Oleksandr
I’m thinking the approx 1% wouldn’t have made it up there quick enough for Cyclone Gillian to take effect.
@Victor,
Thanks for the idea with regard to FL200. As you know, I lean towards the mechanical failure. I have a logical explanation of the turn towards the SIO, but right now I still have a couple of “lose ends”, one of which is the selection of the final altitude compatible with the fuel, and the other one is the bloody right VHF, which should have been operative.
In response to Brock you wrote “In fact, based on what we know today, I would recommend that we don’t yet search. “.
I know that Dennis is of the same opinion. I would disagree with this, and recommend the search in the two areas:
1. The location of the “Curtin boom” defined at the intersection of the 7th arc and the acoustic signal bearing. It is well-defined area, compatible with the majority of the drift studies. In addition, this location features a number of other interesting “properties”.
2. The location, where Haixun-01 detected 37.5 Hz ping. Generally, it may also be compatible with the drift studies, though less likely.
Screening these two areas would take around 1% of the budget spent by Fugro. Worth of it, in my opinion.
@Joseph Coleman,
I think you are mixing up thing. The 1% was with regard to the origin at 44.5S. Where was Gillian? This is that.
The impact of cyclones were taken into consideration through the surface currents and wind.
@Brock: Please re-read what I wrote, and pay attention to the chronology of events, which you chose to ignore. And in the future, if you are going represent to the ATSB or anybody else what I believe, please use my exact words, and not your interpretation of my words.
@Niels: even my attempt at a pedantic definition still fell short. I see on further review you refer to hybrid paths, where the aggregate [leftward and shorter] path bias is the result of [a smaller, irregular set of speed and heading changes] between Arcs 2 through 6, instead of [a constant slower speed, and a set of regular heading changes]. Hardly less nonsensical, as you say (we still require at least one spectacular coincidence, causing the BTO impact of a speed and heading change to perfectly offset), but falling outside my first crack at a definition.
@MH
On your comment; “It seems to me from @Oleksandr’s debris drift probability plots, the ones starting along latitudes that of Exmouth/ Learmouth seem to hit the locations where actual debris were found.”
That’s true but you can see from that latitude ( ~20S) no drifters/debris reach South of Madagaskar to Mozambique and SA. So this latitude(s) can be excluded as possible crash latitudes in @Oleksandr’s model.
The most probable segment is ofcourse the one that covers most debris landing areas and that one is 30.6S/31.7S.
The less debris landing areas are covered the less likely/impossible the segments become as a possible crash area.
@Olaksandr
Gillian was many miles away. Like me! 🙂 Thanks for mentioning that the impact of cyclones were taken into consideration through the surface currents and wind. 44.5S and 89E is well far south. Is this possible impact area being considered by anyone?
@Victor: I know very well what you wrote. It is the significance of the chronology which we dispute: you think the ATSB’s use and interpretation of the NW point is much different and much more transient over time than do I. No matter; the ATSB will clear this all up, so that we need not quibble.
I admit that I have at times not always tried my best to characterize opposing views as fairly as proper debate requires. It is a temptation to “slay the paper tiger” to which most of us at times succumb. But on this radar coverage topic, I assure you, that, in the email’s one paragraph describing your “Singapore” interpretation of the NW point, I made every effort to describe your position as faithfully and as fairly as I could. In fact, I actually worked very hard to give your view every benefit of every doubt, so am quite surprised by the severe tone of your last note to me. I am more than happy to post the transcript to this forum, if you wish for readers to judge for themselves.
@Ge Rijn,
@MH,
Note that besides matching the debris distributions, the only area consistent with De Deckker’s analysis of the temperature appears to be from approximately 27 to 36S, with the peak at 30S. I have respective plots, but these require supplementary notes/explanations.
With regard to the towelette. I think the towelette may be characterized by a significantly different leeway compared to the flaperon. Too early to jump to a conclusion.
Regarding Sri Lanka and Andaman. You need to keep in mind, that these areas were not specifically searched. Besides probability of beaching, there is also a factor of debris discovery and recovery. In general, I think it would be more fruitful to search the eastern shore of Madagascar.
@Victor
https://m.youtube.com/watch?v=q7dBO8uEq7o
For some reason Chris Ashton seemed convinced early on by what he may have been told flying over Amandon
@Victor
https://m.youtube.com/watch?v=q7dBO8uEq7o
For some reason Chris Ashton seemed convinced early on by what he may have been told flying over Andaman Islands quote “I’m not an expert on those particular areas” who told him about a Andaman Fly
@Oleksandr
Unfortunately the rate of debris recovery has fallen off considerably. I updated the Weibull prediction below, and it is not pretty. Maybe we are at the end of the road here, or maybe simply no one is actively looking anymore.
http://tmex1.blogspot.com/2017/03/mh370-debris-finds.html
Eons ago, I made the point that the likelihood of a combination of a descent and a heading change being observed, as compared with observing a constant heading track, argues in favor of the constant heading track. A zero descent rate interpretation of the BFO at 18:40 is a heading of about 215T and Richard has, I believe, used this in some scenarios. (BTW, it does explain the end game heading if a turn was made later to ISBIX.)
The descent scenario has a likely duration of about 5-7 minutes. A turn to 215T at 18:40 would just as likely be observed as the heading could be held for a longer period of time at altitude.
Victor and several others have made the point that if a scenario is physically plausible it needs to be exhaustively investigated. This necessarily involves making assumptions and testing for plausibility. That there is a debate on these issues is no cause to
be less than dispassionate.
We all await the kind of leaks that seen to plague first world governments.
Sid
@Joseph Coleman. I realise that it is deeply unfashionable but yes, I am still considering 89E 44.5S. Principally on grounds of multiple sightings of objects of interest that appear to have no other explanation – in an area that lies more or less in line but beyond where most folks think it terminated. A number of commonly (and reasonably) held assumptions would need to be overturned for this to be the case and I’ll admit that this looks like an uphill struggle!
@Joseph Coleman: That would be Chris McLaughlin, not Chris Ashton.
Either Chris McLaughlin was correct and MH370 flew over the Andamans, or he was incorrect and it did not. We don’t know. I wouldn’t peg McLaughlin as an expert in these matters. The main point he was trying to convey was the plane crashed in the SIO and did not fly north.
@TBill
I believe Mick has compared MRO’s maintenance records with other aircraft in the fleet and now views the aircraft’s oxygen usage as normal.
@Paul Smithson
Each to their own. If you had a few million quid spare you could go search there. It wouldn’t do any harm. It would either be a yes or a no find. Besides no-one knows exactly where the plane went down anyway.
@Victor
Thanks for the correction, I must have the name “Ashton” imprinted on the brain. 🙂 Jeff’s forums gone quiet, not much comment posting going on over there.
@Andrew, thank you for the reply.
1. Pardon my ignorance but why are planes left powered on in between flights, especially when the time between the flights may be many hours? Wouldn’t that be wasteful in terms of power usage?
2. According to TBill, the plane had earlier arrived at KLIA (from Beijing) at around 3pm plus, so that means at least 8 hours before the next takeoff. The plane was powered on just before 9pm (around 1250 UTC). So that means the plane must have powered off at some stage before re-powering on. Are you able to tell from the Factual Information Report or otherwise, why the plane powered up 4 hours prior to take off? Or is it common for planes which had been powered off, to be re-powered back on, so many hours prior to takeoff?
@TBill
The “leaked” RMP files contain some oxygen servicing records for 9M-MRO, the ill-fated 9M-MRD and 9M-MRQ. The records are at once interesting, puzzling and alarming for a variety of reasons.
The first and perhaps the most perplexing matter is that there is no record for the 14 January 2014 servicing on 9M-MRO that is referenced in the Factual Information Report. Absent that record it is difficult to carry out a proper analysis of 9M-MRO’s oxygen usage leading up to 7 March 2014 but if we assume that the crew oxygen system was replenished to the standard 1800-1850 psi, then we can infer usage between 14 January and 7 March 2014.
Second, the 8 April 2014 record for 9M-MRD does not state any pressure readings. Accordingly the only usage that can be calculated is for the period 22 December 2013 to 12 February 2014; it’s 13.65 psi per day (which is roughly on par with 9M-MRO’s usage was between 14 January to 7 March 2014). I hasten to qualify that comparison by noting that “per day” is not the most accurate unit of measure as it is cycles (the pre-flight mask checks and the 25 second bleed on first engine start, in particular) that drives the bulk of routine oxygen usage. When I looked at 9M-MRD’s flight history between December 2013 and February 2014 it was not markedly dissimilar to 9M-MRO’s between January and March 2014.
Thankfully, there are sufficient complete records for 9M-MRQ to calculate four sets of usage; for the period 13 November to 31 December 2013 it is 17.29 psi per day, for 31 December 2013 to 2 February 2014 it is 16.06 psi per day, for 2 February to 4 March it is 22.33 psi per day and for 4 March to 30 March 2014 it is 20 psi per day. So we see two pairs of usages; a lower pair up to February 2014 (average of 16.68 psi per day) and a higher pair after February 2014 (average of 21.17 psi per day) – usage rises by 27% after February 2014. At first that looked very odd but a review of 9M-MRQ’s flight history showed that it was moved from less frequent flights on relatively longer routes to a roster of shorter, more frequent flights in early February 2014.
In short, I’m not as satisfied as I’d like to be with the crew oxygen system usage records but I no longer think that there is evidence of higher than normal usage on 9M-MRO between January and March 2014.
@Niels,
I have analyzed and modeled the one re-recording publicly available of the acoustic pings recorded near 21S. It is clearly not at the correct frequency to match the 9M-MRO black boxes. It also could not originate from the seabed, because the signal is too weak to be heard near the surface. The facts are these:
1. Signals were heard by the Chinese vessel at only 1-2 m depth using a transducer on a boom. By the way, the sensing device they were using is made to relocate tagged fishing nets that have drifted away and become lost, which I believe are the actual sources of the multiple signals detected at different locations (~7).
2. Signals were heard with the towed acoustic detector within 150 m of the surface. Again, this is impossible for a seabed transmitter because the signal is too weak and the surface acoustic noise is so high. Return visits to the site of a first detection showed that the signal was not stationary in location (i.e., it was moving with the current).
3. Signals were heard with deployed sonobuoys with a microphone dropped down on a tether from a buoy launched by aircraft. The acoustic signals are transmitted by radio back to the aircraft, but these are also near the surface and cannot detect a seabed black box transmitter.
4. Altogether ~7 detections were made, but never in the same place. They probably originated from at least several pingers attached to drifting fishing nets. They have long-life batteries that can last for months.
I suspect the original search area near 21 S may have been identified because a submarine picked up and reported some pings. At some level the US Navy was involved. Do you remember the USN officer who was on TV every day giving search reports? It is possible a British submarine was involved as well, but to my knowledge neither country has ever publicly stated that submarines were involved.
This is the first case (but not the last) where ATSB went off on what turned out to be a wild goose chase. It is not surprising they chose to invent some mostly nonsensical rationale why they moved on to another search area in order to avoid embarrassment.
@DrB
While there are any number of valid criticisms of the ATSB, the pinger wild goose chase shouldn’t be levelled at them. The Joint Agency Coordination Centre (JACC) was running the search from 30 March 2014, a group that included the ATSB but also the Dept of Defence and the Australian Maritime Safety Authority (AMSA had had prime carriage of the surface search in the SIO prior to the formation of the JACC).
@Mick – Thank you
@Mick,
Fair enough. Then AMSA and JACC led the wild goose chase at 21S. ATSB was along for the ride but not driving the wagon.
@DennisW —
I think you’re correct that your Weibull plot of debris recovery will decay rapidly — partly as you say, because of declining search effort.
But beyond that, your initial curve represents a snapshot population of recoverable debris — it might in fact predict a total population one or two years out. But that population is certainly decaying rapidly — items are degrading until they are unrecognizable, or losing buoyancy and sinking, or beaching and becoming buried, or picked up and put in a bonfire..
A shame that no responsible party cared to put a single dollar into organizing search for debris.
@Olexandr –
Just a couple more comments on your grand drift pix:
— I still wonder if you have a built-in ‘beach attractant’ in your model. Eg,, there’s a much more drastic shadowing by Madagascar throughout than in Chattiaratchi’s models.
— Few of the runs show any likelihood of recovery as far south as Mossel Bay, and those that do, fail to predict landfall at Pemba. Perhaps more variance in leeway would give such wide dispersion.
— With small sample size, it’s dangerous to count absence for much [aside from the spectacular discrepancy for Australis at 37-38S. Still I think you should take absence in SriLanka seriously — if debris reached the south and east coasts it should be overrepresented, particularly in the 100 km or more of heavily-used, populated white-sand beaches between Galle and Colombo, with both curated tourist beaches and villas, and well-educated locals…
— With the existing small, biased sampling of debris [and not theory-free; Gibson went to Mad. on Chattiaratchi’s advise], you are unlikely to narrow the origin much more. Still, it’s ironic that qualitatively, at least, I think you neatly exclude the entire ATSB search zone — perhaps someone will give you the going rate of $200M for your effort?
@Ge Rijn – even so, there is something very unnatural with the debris recovery and distribution. Maybe its the attempt to make a single model from the known currents that just don’t fit, such as the earlier discovery of the flaperon than the smaller items. The IO has a northern circular and a southern circular current but if the crash was in the searched location much more debris would seem more likely hit the South African shores..
Subject: drift experiments using MH370 flotsam, APU fuel at the 7th arc and Boeing simulation configurations for 7th arc descent.
The ATSB has agreed that I may release responses to questions I raised on those topics. The responses answered my questions on the first two and the last in part. I have now asked whether they can provide more information about other Boeing configurations and in particular on those that substantiated the 7th arc BFOs, since no other level 4 simulations I am aware of have done that. I will aim to post any further response received.
Their responses of last week:
“As you requested, I’ve consulted further with my colleagues regarding your suggestion that Australia approach the Malaysian authorities about acquiring recovered MH370 evidence for experiments by the CSIRO. At the moment, the ATSB does not intend to pursue this course of action – we’ve not been advised of any significant information that would be gained.
Meanwhile, we have addressed your questions in order below.
In a 4th/5th May, 2016, e-mail to the ATSB, perforce delayed, I questioned whether the residual fuel available for APU use would be sufficient to power the APU for these 2 minutes, given vagaries of availability and its use by engines. While clearly the ATSB did not have residual fuel in the APU line in mind for this run, by lack of its mention, I speculated as to that possibility. Also as incidentals I questioned whether fuel exhaustion and loss of aircraft AC power would lead to APU auto-start right away, given the time needed for the APU inlet to open; and also I raised engine windmilling possibilities.
My colleagues have advised me that, with the assistance of Boeing and Rolls Royce, the ATSB has developed a comprehensive understanding of the engine, APU and fuel system behaviour after a dual engine flame-out. Based on our understanding, we can say that there was enough fuel to power the APU for at least the required 2 minutes. This takes into account any fuel used by the left engine during relight attempts.
It was also considered possible, but less likely, that the AC power was generated by an engine relighting during the descent
In the ATSB report AE2014-AE-54 of 2nd November, 2016 titled, ‘MH370 Search and debris analysis update’, in page 14’s last paragraph is the statement, “However, in a real aircraft, various aircraft attitudes may result in unusable fuel (usually below engine/APU inlets) becoming available to the fuel inlets for the APU/engines. If this resulted in APU start-up, it would re-energise the AC buses and some hydraulic systems”. The “if” and lack of mention of the APU powering the 7th arc log-on seem to be a significant departure from the ATSB’s previous thinking that an APU run led to that. If the unusable fuel available to fuel inlets did not result in an APU powered log-on – and the ATSB makes no mention of other fuel such as in the APU line – what now would account for it?
The most likely scenario is that the remaining fuel, which includes from the tanks and the lines, would have allowed the APU to be started leading to AC power and the generation of the transmissions that give us the 7th arc. There are many other possibilities that, although less likely, cannot be ruled out. This includes, for example, any scenario that leads to an unexpected power interruptions to the SDU or a reset of that system. As indicated above, there is also a possibility that one of the engines was able to relight during the descent. These are considered less likely and therefore were not the focus of the analysis.
Perhaps the ATSB already had doubts about the APU powered theory in April 2016. The ‘Search and debris analysis update’ notes at page 13, “In April 2016, the ATSB defined a range of additional scenarios for the manufacturer to simulate in their engineering simulator. Reasonable values were selected for the aircraft’s speed, fuel, electrical configuration and altitude, along with the turbulence level”. It may be that some of those encompassed another 7th arc log-on cause?
I’ve been advised that this is not the case. Rather, these simulations were due to a better understanding of the aircraft systems behaviour after one engine flames out and were used to get a range of possible final locations from very prescriptive input parameters.
Would the ATSB advise me please, so that I may be able to pass that on to others, what the various new electrical and other configurations were and whether any might explain the 7th arc log-on if the APU did not start or run for the requisite time? If not included in that would you advise also whether engine windmilling might have generated electrical and hydraulic power at any stage of the simulations?
Firstly, the scenario engine windmilling providing electrical power was considered; it was determined to be impossible by advice from the manufacturers. The RAT, however, would have deployed once total loss of AC power was detected. This would have provided very limited DC power to the emergency bus and some limited hydraulics.
The analysis of various electrical configurations focussed on the possible (but unlikely) scenario, that during the flight, for some unknown reason, the left and right AC busses were powered from the right engine via the AC bus tie. In this purely hypothetical scenario, when the right engine failed, this would remove power from the SDU (along with all the other systems, including autopilot) with the left engine still operating, but not providing any electrical power. This would leave more than sufficient fuel in the left tank to power the APU.
This hypothesis was put forward in an attempt to see if this scenario could lead to the aircraft travelling significantly further from the 7th arc than the standard electrical configuration. According to the simulations, however, this configuration led to highly unstable flight paths that ended closer to where the 7th would have been for that scenario.
I hope you find this information useful, and regret the delay in replying.
The above did not come up with their highlighting.
Under, “Meanwhile, we have addressed your questions in order below”, they repeat my questions in the 1st, 3rd, 5th and 7th paras which follow that.
@Oleksandr
Regarding Sri Lanka and the Andamans I more specifically like to know how your drifters/particals reached those areas coming from between ~38S and ~30S.
Which routes did they take to get there and how much time did it take coming from those latitudes.
I assume you used animations starting from each segment?
@MH
Still I think there is a natural logic in the debris distrubution and recovering times.
The flaperon was the first one found for it was the closest to the 7th arc (only exception the Rodrigues-piece) and we know it must have drifted for a considerable time with its trailing edge sticking above the surface catching wind which made it probably traveling faster than other pieces.
It also probably landed not that long before the finding date for it was still full of barnacles.
The RR-piece was first found ~5 months later also full of barnacles so we can assume this piece also beeched not long before the first finding date.
Then we have a time window of ~5 months between Reunion/flaperon and Mosselbay/RR-piece. In this time the RR-piece must have covered that distance if it drifted the ~same route as the flaperon.
This is possible as Richard’s and Chattiarachi’s models/data show.
And also @Oleksandr’s model comes quite close in predicting Mosselbay.
I think most debris landed in this time window or within ~half a year later. Those pieces were only found (much) later after landing.
I think that’s the reason most recovered pieces lack barnacles/bio fauling.
Regarding the searched location I don’t think more or less debris was likely to hit the SA shores. It only would have taken more time the more South you go (which counts for all debris).
IMO the likelyness of debris landing on SA shores does not depend on the searched location but on the time frames and the fact no debris (still) is found on Australian shores.
The devide was at 36S. South of 36S no drifters land on Australian shores. @Oleksandrs model confirms this fact independently again.
small correction: ‘North of 36S no drifters land on Australian shores’..
@DrB
Let me start by stating again that given the results of recent drift studies S21 anyway should be too far north for the acoustic detections to be (directly) associated to MH370. Nevertheless I find it important that the provenance of the detected signals is well explained. While I share some of your concerns (and have others than you listed) regarding the association of the signals to black box ulb’s, there are a few points which I would like to further clarify.
– The Chinese made their detections further South (around S25/S26 if I remember well)
– The initial TPL detection was made at 300 m depth (and not 150m) according to the link below. Of course different reports can be inaccurate, so if you have a source for the 150 m, please share.
– I’m not sure if at 300m (or even 150 m) it is much noisier than at greater depth. We are considering the several tens of kHz freq. range where the Knudsen curves should “dominate”. If you have other information/literature to support your statement I would be interested to learn.
– From an electronics point of view it is not impossible for the ULB frequency to be considerably off. The change from 33.3 to 27 kHz in a few days time indeed is strange.
– The marine biologist I’m in contact with, suggests that the acoustic signals (as shown in the videos that I linked)do not have the signature of the pingers connected to fishing nets. So if you have (different) info about the type of pingers that are typically connected to fishing nets I would again be eager to learn.
http://www.navy.mil/submit/display.asp?story_id=80169
The way I understood it, AMSA, RAN and USN were all involved in the TPL search. You would expect a high level of expertise in deep sea acoustics to be available at the time, so I still find it a puzzling chapter in the whole story of the search.
@Dennis,
“Unfortunately the rate of debris recovery has fallen off considerably. I updated the Weibull prediction below, and it is not pretty. Maybe we are at the end of the road here, or maybe simply no one is actively looking anymore.”
Looks interesting. Right now I can suggest 2 possible reasons. One is that nobody is actively looking for the debris, as you said. Ironically, none of the fragments was discovered and recovered by the relevant authorities; all the fragments were found either by a chance, or by BG and his followers, where debris could be expected.
The second reason is that a considerable fraction of the debris appears to be trapped in the SIO gear if the crash was around 30S. Hence, expect fragments to arrive in groups.
@DennisW
Did you consider the SA finds on 23-12-2016 and 28-1-2017 in your Weibull prediction?
http://www.enca.com/south-africa/former-protea-finds-possible-mh370-debris-on-beach
http://www.ibtimes.com/possible-mh370-debris-found-malaysia-investigate-plane-wreckage-washed-beach-south-2483452
I think at least the 28-1-2017 find is highly likely MH370.
Would this still be in line with your Weibull prediction?
@Ge Rijn
I did not include either find above since they were not “rated” by any authority that I am aware of. I will include the 28-1-17 piece just to see how it “looks”.
@Ikr,
– I still wonder if you have a built-in ‘beach attractant’ in your model. Eg,, there’s a much more drastic shadowing by Madagascar throughout than in Chattiaratchi’s models.
Nothing special. In my model it is assumed that if a particle hits a shore, it stays there. The plots I presented show smoothed probability, e.g. probability of 0.1%, roughly speaking, implies that 50 of 50,000 modeled particles arrived to the stretch of the shore of 40 km length (I used normal-distribution filter with sigma = 20 km).
You may see that one fragment was discovered at the southern tip of Madagascar in Feb 2016. Pattiaratchi’s model does not seem to predict it. My model shows that probability is high along the whole eastern shore of Madagascar. If you take a look at Google Earth, there even no paved roads exist. Also many swamps. I think it would need an expedition with some logistic support to search there. But so far all the found debris suggest that the debris cloud is separated into the two, one of which passes by the southern tip, and the other one – by the northern tip. Hence, it is logical that more debris can be expected anywhere at the east coast of Madagascar.
— Few of the runs show any likelihood of recovery as far south as Mossel Bay, and those that do, fail to predict landfall at Pemba. Perhaps more variance in leeway would give such wide dispersion.
I also think so, and in-fact, I am doing more simulations with random leeway to see the effect.
— With small sample size, it’s dangerous to count absence for much [aside from the spectacular discrepancy for Australis at 37-38S. Still I think you should take absence in SriLanka seriously — if debris reached the south and east coasts it should be overrepresented, particularly in the 100 km or more of heavily-used, populated white-sand beaches between Galle and Colombo, with both curated tourist beaches and villas, and well-educated locals…
If you see the plots, the absolute probability for the origins at 30S is around 0.05%. If you compare with SA beaches, one should expect to find roughly 1 fragment in Sri Lanka. Not much. The interesting point is that for the more southern and more northern origins probability is growing. I guess this is because in both the cases particles enter outer streamlines of the ‘global’ SIO gear, while for the origins at 30S – inner. I will take a look at respective trajectories to confirm this. But actually, the fact that nothing was found in Sri Lanka is more consistent with the origin at 30S compared to the southern or northern ends of the arc.
— With the existing small, biased sampling of debris [and not theory-free; Gibson went to Mad. on Chattiaratchi’s advise], you are unlikely to narrow the origin much more.
There is temperature data from De Deckker’s analysis, which seems to narrow down the possible area of origins to around 30S. Both southern and northern ends are not compatible with the temperature variation “24-18-25″C. That was a primary reason to setup my drift model.
“Still, it’s ironic that qualitatively, at least, I think you neatly exclude the entire ATSB search zone — perhaps someone will give you the going rate of $200M for your effort?”
Well… Back in the fall of 2014 I said their “priority area” is unlikely. My conclusion was based on the absence of the logic supporting FMT assumption. A perfectly flying airplane, under apparently active control, cannot become a ghost ship in as short as 15 minutes.
@Andrew,
Since my last comment (actually questions) which was addressed to you, I took another look at the Factual Information Report. At page 54 where it was stated that the initial log on was at 1250 UTC there was a line which reads: “This is the first SATCOM activity recorded at the GES since 0802:27”.
So it seems the plane had powered off not long after arriving at KLIA from Beijing, at around 4pm local time. It powered back on before 9pm local time when takeoff was scheduled for 12.35am local time. Why would the plane powered on 4 hours prior to takeoff? And on what power source? The APU, a ground power unit or the engines of the plane?
David,
Since you are already in touch with ATSB with regards to the modes, as well as it seems you were playing with the simulator…
Would it be feasible for you to check what happens under the following conditions:
– ARIRU fails, or it was restarted in the air.
– AP is disabled, but FD is ON.
– The aircraft is left on its own at the bank angle of, say, 3 deg.
Re: “The analysis of various electrical configurations focussed on the possible (but unlikely) scenario, that during the flight, for some unknown reason, the left and right AC busses were powered from the right engine via the AC bus tie. In this purely hypothetical scenario, when the right engine failed, this would remove power from the SDU (along with all the other systems, including autopilot) with the left engine still operating, but not providing any electrical power. This would leave more than sufficient fuel in the left tank to power the APU. ”
I do not understand why the flameout of the right engine causes the loss of all the other systems including the AP. In my understanding, in such a case L backup generator provides power to the L & R transfer buses, so that AP and other essential systems continue working without interruption as long as L engine is operational. The SDU would be lost due to the design, but not the AP.
@Oleksandr
Can you please explain how you came to connect ~30S with DeDekker’s barnacle temperature shifts of ’24-18-25′?
@DennisW
Yes, I would be curious if this Weibull-trend will still be as expected if you’ll include this 28-1-2017 piece and according this trend we can hope on more debris found soon.
Although I assume not a lot of debris will be found anymore for the amount of pieces found to date within the possible time frames connected to their locations show IMO a rather small debris field of maybe only ~200 long time floating pieces.
I base this mainly on @MPat’s study and Griffins. In @MPat’s case out of 177 historical drifters that passed through the previous search-zone 54 beeched on African and Australian shores within 22 months the rest caught up in the SIO gyre.
13 of those 54 reached Australian shores but those only came from beneath 36S. 30 drifters North of 36S beeched on African shores.
This is ~the picture we see after 3 years.
I don’t know, maybe a hundred pieces lying around still not found after 3 years but it seems unlikely to me. And with passing of time tracing back new found pieces will get more and more complicated.
By now it could well be a piece gets found on the West-coast of Africa somewhere or maybe even in the English Channel 😉
@Ge Rijn,
Re: “Can you please explain how you came to connect ~30S with DeDekker’s barnacle temperature shifts of ’24-18-25′?”
As I mentioned before, initially the problem “24-18-25” was my primary subject of interest. To analyze it I extracted SSTs from the high-resolution NASA’s database for each particle track. I introduced some criteria to select particles, which satisfy 2 conditions:
1. They must reach Reunion by Aug 29, 2015.
2. They must experience temperature variation derived by Prof. De Deckker from his barnacle analysis.
Here is a plot presenting probability of particles to satisfy these two conditions for the leeway 3.2% and drift angle zero:
https://www.dropbox.com/s/yl9t428hyq2k7fp/stat3_lw3.2_da0.0.png?dl=0
Here is a plot presenting probability for the leeway 3.2% and drift angle 18 deg to the left (one of the actual possible flaperon’s drift characteristics based on the French lab tests):
https://www.dropbox.com/s/08aywc7yv0ic9dd/stat3_lw3.2_da18.0.png?dl=0
Here is an example of SST for the first several particles, best satisfying selection criteria (for leeway 3.2%, drift angle zero):
https://www.dropbox.com/s/5fn4cl8yudzt3ts/sst_sample_particles_98.07E_30.03S_lw3.2_da0.0.png?dl=0
As expected, neither far south nor far north sections of the 7th arc can satisfy these 2 conditions simultaneously; only around 30S. And this area is consistent with the debris distribution maps.
More explanations will be in my report.
@Oleksandr
Thanks a lot. As I understand your graphics well the shifts in temperature are caused by seasonal changes in dropping surface temperatures overtaking the flaperon in time moving North from ~30S before and over September and after September increasing surface temperatures are submitted to the flaperon again while the starting SIO spring and summer are increasingly heating up the ocean surface overtaking the flaperon the other way around.
I proposed this explanation long time ago on JW’s blog.
If I understood you well and your findings are what they seem to be those are another indication based on your more sophisticated findings the crash area has to be around ~30S.
The drift speed to the North of the flaperon compared to the speed of seasonal chances in ocean surface temparatures from North to South (and the other way around) through the year make a quite narrow area in which those ’24-18-25′ barnacle temperatures could have occured.
Maybe I’m interpretating your model wrong. Anyway I think you’ve done amazing work.
Cann’t wait to see your report.
@Alex Siew:
“So it seems the plane had powered off not long after arriving at KLIA from Beijing, at around 4pm local time. It powered back on before 9pm local time when takeoff was scheduled for 12.35am local time. Why would the plane powered on 4 hours prior to takeoff? And on what power source? The APU, a ground power unit or the engines of the plane?”
As I said to you previously, in my experience the aircraft are normally left powered-up between flights. That’s done for maintenance purposes and also to ensure the AIMS remains powered. A cold-start of the AIMS takes some time and can lead to error messages that take the engineers a long time to clear. It’s far easier to leave it powered-up.
The FI report doesn’t say what type of SATCOM activity occurred at 0802:27. My guess is that it occurred as a result of the ADIRU being switched off by the crew or the engineers as part of the aircraft securing checklist after the aircraft arrived from its previous flight. It doesn’t necessarily mean the aircraft was powered down at that time.
If the aircraft was powered down, then it wouldn’t be at all unusual for it to be powered up again four hours before its next flight, for the reasons outlined above. The aircraft would be powered either by external power or the APU, but NOT the engines.
@Olexandr. Many thanks for running that scenario. It is the first drift model that I have seen originating with that hypothetical location. Many moons ago, I did alert folks whom I know in the southern Mafia island area to keep an eye out in the knowledge that it is a magnet for stuff coming from Comores side. I’ll do so again, if you like.
With regard to your model, I’m concerned that your coasts are too “sticky”. In practice, the likelihood of flotsam making landfall is greatly intensified by coastal eddies caused by headlands/bays/estuaries, or offlying barrier reef. Most of east coast Madagascar is neither – it is a very straight, very deep drop-off wall. From the topography, I would expect that the only place likely to attract debris would be the 16S-17.7S section around St Marie.
I don’t know if you have ever seen flotsam or a disabled boat in the vicinity of a sea wall. Even on a lee shore, it tends to get held up by the reflected waves off the wall and ends up being carried parallel to it. I think there is a very high likelihood that a great portion of the particles that “stuck” to Madagascar in your model south of 18S would, in practice, get swept south down the island and beyond – on towards SA. Perhaps it is an over-estimation of coastal “stickiness” that makes it so difficult for these models to envisage the likely onward drift, past Madagascar and along the Agulhas?
@Andrew, thanks very much for the reply.
1. The SATCOM activity at 080207 would probably be the log-off of the AES when the plane was powered down after arriving at KLIA from Beijing on the previous flight. As an example, see the ACARS log for the Swissair 111 flight.
http://www.collectionscanada.gc.ca/eppp-archive/100/200/301/tsb-bst/swissair-e/html/02sti/06aircraft/acars.html
2. If the SATCOM activity was triggered solely by ADIRU being switched off but the AES/plane had remained powered, there would have been either handshakes or in the alternative other SATCOM activity in the period between 080207 and 1250 UTC. The FI showed the SATCOM system linked to the omnidirectional LGA logged on at 1250 [initial log-on] and this SATCOM system would have had 3 handshakes the last at 1554 the first entry in the SITA logs, before ADIRU was initialized a few minutes later just prior to 1600 UTC.
3. Can I ask a followup question: do you know or are you able to tell from the Factual Information Report what were the items of “maintenance’ that were carried out in the space of the 4 hours prior to takeoff?
4. On the power source for those 4 hours, there is an APU report in the FI which expressly referred to prior APU usage of 4 hours; are you able to tell if the 4 hours referred to the 4 hours the plane was on the tarmac powered-up prior to takeoff or were these 4 hours referring to APU usage on the previous flight/cycle?
I apologize for asking so many questions. The Factual Information Report for some reason only gave the maintenance log entries for the prior week (Feb 28 to March 7) although the plane had an A1 check on February 23th and it would have made much more sense to give the logs from such date at the very least. Especially given Captain Zaharie piloted the same plane (9M-MRO) on the last 2 flights prior to the A1 check, from KL to Beijing on Feb 21st and the return trip from Beijing to KL on Feb 22nd and there was a significant drop in crew oxygen level between January 14 and March 7.
Regarding the rate of descent of a B-777 (the theme of the posted article), there is a huge store of data at FlightAware waiting to be explored. Flightaware keeps a backlog of 2 weeks available, including the history of each flight tabulated at 30 or 60 second intervals. Basically we are looking for planes that descend at a constant ~2500 fpm for periods of order 5 minutes. The BFO is quite sensitive to small changes in ROC – a change of 200 FPM causes the BFO to change by 4.5 hz, which is bigger than the 4 hz p-p BFO noise and thus would be visible in the data.
I figure cargo planes are good candidates – no passengers to complain. With casual searching I came across these two – Southern Air 7640 into Anchorage, and UAE 9887 into Dubai. For these particular flights, the descent phase is more or less continuous from cruise altitude to landing. For many of them, the rate of descent bounces all over the place – no steady BFO at any time. For a few flights, however, there are stretches of a few minutes (up to 5 in the best case) where the descent rate is more or less constant, although bouncing around within a 200 fpm window is typical. The most constant rates happen around -1400 fpm. The faster the rate of descent, the more variable it is. I have yet to find one flight that had a constant -2500 fpm.
What is also interesting is that the same flight number on different days can have quite different behavior – as if pilots have a personal preference for which mode to select for descent.
Based on this small sample (plus some others) of observations, I think it highly unlikely that MH370 was in a constant rate of descent during the 18:40 attempted phone call. You are free to think differently.
@sk999
Is the rate of descent actually provided or are you inferring the rate by differencing the reported altitude versus time?
DennisW
It’s provided AND you can difference the reported altitude. Belt and suspenders. Quantization, however, is the enemy.
@sk999: That’s helpful information. I am less concerned about the trend of the vertical speed over several minutes as I am concerned about the higher frequency “bouncing around” of 200 Hz. However, I don’t think that the higher frequency variation would occur to that degree if the plane was descending in the V/S pitch mode, which would result in a “smoother” descent. One thing we have to also consider is that MH370, if descending, did so without ATC communications, and that might have influenced how it descended compared to flights that follow flight plans and ATC restrictions.
If we can rule out a descent at 18:40 because it requires the vertical speed to be impossibly steady, that would be progress. I introduced the post because I think it is a worthwhile topic to discuss. I remain open-minded and solicit input from others.
@Niels,
You said:”From an electronics point of view it is not impossible for the ULB frequency to be considerably off. The change from 33.3 to 27 kHz in a few days time indeed is strange.”
Actually it is not the “electronics” that determines the ULB transmit frequency. It is mechanical resonance in a high-Q crystal. Electronic defects may affect the amplitude but not the frequency in a significant way. If one measures 33.3 and 27 kHz, or indeed any frequency difference by a kHz or more, then there must be two different piezo oscillators in two separate devices. The only way to shift the frequency mechanically is to break the crystal (causing the frequency to go up), but in that case the amplitude will be so weak you can’t hear it in the sea environment.
Sonotronics in Tucson, Arizona makes pingers for use as equipment locators. Here is a data sheet:
https://drive.google.com/file/d/0BzOIIFNlx2aULW03T1NNVDc4Qkk/view?usp=sharing
@Andrew,
Thanks for answering my question regarding the Cost Index. I have another. Suppose one engine quits mid-flight. How can the fuel in that corresponding wing tank be transferred so it can be used by the remaining operating engine? Must this be done manually by the flight crew using cockpit switches to run the pumps? Is there any way that this could occur automatically without flight crew action?
@DrB: I don’t think you can transfer fuel from one tank to another. To correct a fuel tank imbalance, for instance, you would manually turn off the forward and aft pumps on one side and open the crossfeed valves. This also means that if one engine was out early in the flight, a pilot had to manually re-configure the fuel flow by opening the crossfeed valves so that the remaining engine could draw from both tanks, or actively manage the imbalance. For a single engine drawing from both tanks, I don’t know how evenly the draw would be, although it might not matter if one tank went dry before the other. Perhaps @Andrew can comment.
Victor,
Points well taken but already factored in. I have been particularly looking at airports where ATC restrictions would be minimal. The presumption is that, assuming that the hypothesized constant V/S descent did occur, MH370 was not the first aircraft ever to do so.
The Dukane DK100 ULB
Datasheet: https://www.google.co.nz/url?sa=t&rct=j&q=&esrc=s&source=web&cd=9&cad=rja&uact=8&ved=0ahUKEwjOlfOX8_rSAhXCFZQKHfWDCK4QFghBMAg&url=http%3A%2F%2Fwww.manualsbase.com%2Fmanual%2F639201%2Fradar_detector%2Fdukane%2Fdk100%2F&usg=AFQjCNFji2cG9Izg7i5ZjerR2Ifh926-pA
Youtube test and teardown: https://www.youtube.com/watch?v=mQehX0rVYuY&feature=player_detailpage#t=222
@Oleksandr.
My reference to simulator outcomes relayed other’s experiments: I do not have access. To trial ADIRU failure, AP disabled, FD on, 3˚ left bank maybe others here might help? Home simulators might yield an opinion.
As to the A/P being powered by the left backup generator, see pages 6 & 7 of: http://dlia.ir/Scientific/IEEE/iel3/62/3957/00149784.pdf
With power to the FD and pitot heat (AC from transfer bus) as I see it the A/P would be powered, the FCS in normal mode.
It may be the configuration in this hypothetical scenario included the left backup generator being switched off, unstated.
@DrB:
“Suppose one engine quits mid-flight. How can the fuel in that corresponding wing tank be transferred so it can be used by the remaining operating engine? Must this be done manually by the flight crew using cockpit switches to run the pumps? Is there any way that this could occur automatically without flight crew action?”
As Victor said, the fuel can’t be transferred between tanks, but the fuel system can be reconfigured so that the operating engine draws fuel from the opposite side. That action is not automatic; at least one of the cross feed valves must be selected open and the fwd & aft fuel pumps on the operating engine’s side turned off. Fuel will then be supplied from the opposite side.
@Alex Siew:
“…do you know or are you able to tell from the Factual Information Report what were the items of “maintenance’ that were carried out in the space of the 4 hours prior to takeoff?”
I don’t know the exact timing, but the Tech Log entries in Appendix 1.6A of the FI report show that the following maintenance activities were carried out on 7 March:
1. Ref NTC #3 water qty indication inoperative – Potable water serviced till overflow.
2. To carry out lavatory waste compartment doors and flaps – AD inspection – Carried out as per task card SIPCM 2-4- 002AD. Satisfactory.
3. To carry out fwd large cargo door and door to cutout mating surfaces lubrication – Task carried out as per AMM 12-21-21- 640-802. Satisfactory.
4. Main entry task card T1400115-001 Ref TSI/77/CIL/1420. To carry out terrain database loading. – Said terrain database loading carried out IAW AMM 34-46-00. Satis.
5. Night Stop. Crew oxygen system pressure reads 1120 psi (EICAS). – Crew oxygen system replenished to 1800 psi – EICAS. AMM 12-15-08 refers.
6. Maint : To carry out EPESC software down grade. – EPESC software downgrade carried out IAW TSI/77/SR/14092 IFE of CHI satisfactory.
I assume that most, if not all of those activities were completed while the aircraft was on the ground in KL on 7 March. In addition, a Transit/Stay-over check would have been completed, the toilets serviced and the cabin cleaned some time after the aircraft arrived in KL from its previous service.
“On the power source for those 4 hours, there is an APU report in the FI which expressly referred to prior APU usage of 4 hours; are you able to tell if the 4 hours referred to the 4 hours the plane was on the tarmac powered-up prior to takeoff or were these 4 hours referring to APU usage on the previous flight/cycle?”
I don’t know!
@Paul Smithson,
Welcome. Yes, I think it would be a good idea to alert folks in the southern Mafia Island, if you have such an opportunity. Of course, a large fragment such as the flaperon would be noticed either way, but small pieces, especially plastic or composites, may be easily be discarded or thrown into garbage bins.
Re: “With regard to your model, I’m concerned that your coasts are too “sticky”. In practice, the likelihood of flotsam making landfall is greatly intensified by coastal eddies caused by headlands/bays/estuaries, or offlying barrier reef. Most of east coast Madagascar is neither – it is a very straight, very deep drop-off wall. From the topography, I would expect that the only place likely to attract debris would be the 16S-17.7S section around St Marie.”
While it is true that in the present version of my model I have not considered specific properties of the shore, I am not quite sure what you meant by “very deep drop-off”. Google Earth images show sandy, quite flat beaches, with a lot of rivers/streams/swamps/estuaries, say from 20 to 23S. In a similar place BG found the “No Step” fragment. There are seem to be only villages, no paved roads, no developed infrastructure. Not easy place to search.
Re: “I don’t know if you have ever seen flotsam or a disabled boat in the vicinity of a sea wall. Even on a lee shore, it tends to get held up by the reflected waves off the wall and ends up being carried parallel to it. I think there is a very high likelihood that a great portion of the particles that “stuck” to Madagascar in your model south of 18S would, in practice, get swept south down the island and beyond – on towards SA. Perhaps it is an over-estimation of coastal “stickiness” that makes it so difficult for these models to envisage the likely onward drift, past Madagascar and along the Agulhas?”
While I generally agree with what you said, I have to say that:
1. I do not see wall-kind shores along the Eastern Madagascar, but rather flat sandy beaches.
2. To my knowledge the eastern Madagascar was not searched. BG found debris in the relatively easily accessed urbanized places, but not remote areas without paved roads or any other developed infrastructure.
3. The fragment found in Sainte-Luce (25S) proves that beaching is quite possible not only at the northern tip. This is consistent with my model’s prediction.
@DrB: I did discover another way in which holding speed would be maintained. If the present position (PPOS) is chosen as a hold point with the A/P in VNAV but NOT in LNAV, then the plane will decelerate to holding speed until the hold is exited by the pilot. (If in LNAV, the plane would execute a holding pattern.)
David,
Thanks. I am aware of this paper, so that in conjunction with the electrical scheme from the Qatar Airways maintenance manual, FCOM, FI, and bits from some other papers/documents, this gives some rough idea about the design of the electrical system of B777. When one mentions the L&R AC buses, one would also need to explicitly specify whether he/she means ‘main’ or ‘transfer’ to avoid confusions.
The only way for the AP and other essential equipment to become depowered in the scenario you described is that L backup generator was also inoperative, so that L&R AC transfer buses would become totally depowered. The other issue is that the cross-IDG power sourcing is the last choice, so that if APU was functional, it would be switched on to replace the left IDG, and in such a case there would be no power interruption on the flameout of any/both the engines.
Re: “To trial ADIRU failure, AP disabled, FD on, 3˚ left bank maybe others here might help? Home simulators might yield an opinion.”
I have asked many people, but no one was willing to help. It looks like the AFDS would roll the plane to wings level as the bank angle is less than 5 deg, but HDG/TRK HOLD would not be engaged because of the ADIRU failure (if a new reference heading is manually entered into the ADIRU by the crew, HDG HOLD could become functional again). The ATT mode can be selected by a pilot on A320/330 without compromising the stability. A pilot of B777 does not have such a freedom (except holding in the ATT mode at a bank angle >5 deg using FD), but this does not mean that B777 cannot fly in the ATT zero-bank mode.
@all
I’ve extracted BFO datapoints from images on p.7 in the last article by Holland,
you are welcome to use these for oscillator analysis and such (points on img.9 shifted up by estimating difference with img.8 and then extra points added from img.8) The points are extracted semi-automatically, so close points are better resolved.
https://github.com/kprostyakov/raster2csv/tree/master/out/merge
@David and All,
Please see below the electrical design scheme of B777 I was referring to in my earlier post:
https://www.dropbox.com/s/iu63ndevzabif0m/B777_electrical.png?dl=0
Source: “Boeing 777 Refresher Course” by AIrline Maintenance and Engineering Training Ltd., June 2004.
It clarifies the power sources, as well as the difference between the main and transfer AC buses of a B777, which are often confused.
@Victor,
@Andrew,
Thank you for answering my question regarding automated switching of fuel usage with One Engine Inoperative. Since this is not possible in an automated fashion, if an engine failed with a non-responsive flight crew within the first several hours after 18:40, the remaining engine would have reduced operating time thereafter and would be unable to operate until 00:17 in the case of INOP LRC. However, for INOP HOLDING, the fuel flow is less than the 2-engine HOLDING fuel flow, and operation until 00:17 might be possible. However, the altitude needs to be FL250 or lower for INOP HOLDING. Would a descent take place without crew action if an engine failed while at HOLDING speed at ~FL350?
@Victor,
@Andrew,
Victor said: “@DrB: I did discover another way in which holding speed would be maintained. If the present position (PPOS) is chosen as a hold point with the A/P in VNAV but NOT in LNAV, then the plane will decelerate to holding speed until the hold is exited by the pilot. (If in LNAV, the plane would execute a holding pattern.)”
So that is one way (the only way?) to achieve HOLDING speed without flying a racetrack.
Consider this sequence of events:
1. The waypoints in the Active Route are NILAM, IGOGU, and ANOKO.
2. HOLDING speed is entered in VNAV (but not in LNAV). The aircraft slows to current best HOLDING speed.
3. A HOLDING pattern with a fix at ANOKO is entered in LNAV.
4. A route offset is entered (but I don’t think it matters whether it was entered before Steps 2-3 or after them).
5. The flight crew does not respond to the warning message two minutes before reaching abeam ANOKO to remove the offset.
6. An END of OFFSET error occurs abeam ANOKO, aborting the racetrack.
7. An END of ROUTE error occurs, defaulting LNAV to a constant magnetic heading (CMH), assuming the switch is set to NORM.
This would seem to produce HOLDING speed prior to and after the aborted HOLDING pattern. If this is possible, then the one remaining difficulty in this scenario is getting a BTO/BFO fit to a CMH route. So far, I have not found one.
@Olexandr – steep dropoff, wall etc referring to the topgraphy of the bottom close to the coast. see here for example
https://www.dropbox.com/s/7l4dpqftzahbkay/Screen%20Shot%202017-03-29%20at%2015.56.07.png?dl=0
@DrB
What about CMT?
what about CMH switch to CMT upon hitting 75 knot winds from the West?
When I get time I am going to start from Arc5 and ask what adjustment might have been made that could explain Arc6 crossing at the BFO/BTO? I’ll be looking for oceanic waypoint discontinuties etc. I am going to assume ARC5 is correct and I am agnostic on how it got there.
@TBill,
You said: “What about CMT?
what about CMH switch to CMT upon hitting 75 knot winds from the West?”
There is no mechanism AFAIK for the FMC to change lateral navigation method on its own based on the wind. A pilot could do this, but why and why at a handshake time (of which he is unaware)?
@Paul Smithson,
I see what you meant. The answer is simple: this steep bathymetry is properly taken into account by the underlying 3D hydrodynamic model.
What is not taken into account is the type of a shore and waves breaking, i.e. the factors which affect probability of beaching of a floating object immediately at the shore. Obviously, no beaching can occur at a vertical wall exceeding the vertical dimensions of the object.
@DrB
I do not think PIC was aware of ping rings, but I assume he hypothetically could have pushed the Track heading early (@FMT) or late in the flight, I am thinking that was a mighty wind below around 22S. I do not know if the PIC was alive or not. I realize some of that is outside of your proposed explanation, but whether or not I am looking at your path or a Victor/Richard path, I try to think up variations the theme. You have me somewhat convinced that if we give true value to the BTO/BFO (if we do not discount the data) then somewhere in your end-point or the orig end point of Inmarsat is the sweet spot to search.
The last MH370 post Duncan Steel put up before closing them to comments was a very helpful list of radar site data provided by Don Thompson; he invited us to suggest others.
Does anyone have the precise coordinates and elevations for the two relevant Indian radar stations: Car Nicobar, and Port Blair?
I have replicated Duncan’s results, and can build my own kml’s, so all I need are the coords and elevs. Thanks in advance.
IAF Car Nicobar has a Rohini transportable radar at N 9° 9′ 0.33″ E 92° 49’ 11.05″
I can’t be 100% sure about the location of the Rohini at INS Utkrosh, Port Blair (haven’t managed a ground level image corroboration) but my assessment is N 11° 37‘ 30.46″ E 92° 42′ 49.94″
You can get altitude from GE, just zoom to max res & hover your mouse over the co-ordinate.
The Rohini radar is reported to be a medium range surveillance radar, with a range of 150km.
@DrB
I doubt it is the mechanical resonance of the piezo that determines the output frequency. If you look at the original ULB patent it is driven in a forced oscillation mode by an electronic (relaxation) oscillator circuit. Of course it will be designed for the frequencies to match, but if the driving frequency is off it looks to me the output will be as well.
However, I don’t know for sure if that is still the way Dukane is doing it, perhaps the youtube link Brian provided (thank you!) can help us, or we can find out in a different way. What the manual suggests is that ULBs need maintenance, so that is another thing to check (FI?)
http://patentimages.storage.googleapis.com/pdfs/US3992692.pdf
The “audio oscillator” used in the ULB patent is probably this one: https://goo.gl/VhEeaU
…or one of the many similar variations on this classic CMOS circuit. I’ve used this circuit many times. With low TC R and C components, you can get frequency stability of 1-5% over -40 to +50C, depending on the CMOS inverter device used. However, the audio oscillator is driving a crystal (the acoustic output device) with a resonate frequency nominally equal to the audio oscillator frequency. I wonder if the crystal will have any influence on the frequency, even if it is not part of the oscillator tuned circuit.
Looks like the link above does not go to the correct illustration. Try this one: https://www.dropbox.com/s/aiuqz3ky53hbt8u/oscillator.JPG?dl=0
@DrB
I think it is the dimensions of the beacon metal “cylinder” that determines the frequency of oscillation. The frequency is specified as 37.5 kHz +/- 1 kHz. That is a very coarse range, and not something determined by a piece of ceramic. The ceramic simply “rings” (imparts energy) to the beacon case.
The nominal 1 pulse per second is determined coarsely by the realization oscillator which drives the ceramic transducer.
cut-paste below from the Duane web site//
Theory of Operation
The DK120/90 is a battery operated underwater acoustic pulse generator (beacon / pinger) that is activated when the water switch is immersed in either fresh or salt water.
The water switch is part of a low current triggering circuit, which when closed will initiate normal pulsing of the beacon oscillator circuit. The output voltage of the oscillator is coupled to the Piezo- ceramic transducer ring.
The resultant mechanical motion is transmitted to the metal case of the beacon, which in turn radiates acoustic energy into the surrounding water at 37.5 kHz. The pulse generated are approximately 10 ms in duration, and occur about once per 1 second as shown in figure below.
Duane should be Dukane
Didn’t David Soucie describe how he tried, with hammers & mallets, to bend the freq of a Dukane ULB without success.
Re the DK100 ULB
The deconstruction Youtube video shows pretty clearly that the frequency of the 37.5Khz oscillator is controlled by a tiny monolithic [tuning fork] resonator. The stability of such an oscillator will be much greater than the +/- 1Khz specification. The oscillator output is then gated using a few additional components to produce the 10mS on period and the approximate 1 second cycle time.
The output is then coupled through a broadly tuned circuit, probably a ferrite transformer, tuned by a small ferrite slug, to create a large drive voltage to drive the large piezo ceramic transducer ring which is mechanically coupled to the metal case of the ULB.
It is inconceivable how the ULB could operate at 33Khz. [note that 33Khz is strangely close to another widely used frequency of 32.768 Khz, which suggests that the detected signal was probably from some other device].
@Andrew,
1. One of the many MH370 ‘coincidences’ is that Captain Zaharie was the last pilot to fly the plane (Feb 21: KL to Beijing, Feb 22: Beijing to KL) before the plane was given a check on Feb 23, 2014. This check could have been as originally scheduled or it could have been rescheduled to this date because of something coming to the attention of the pilot on the last flight prior to the check or the last flight out of KL prior to the check. Captain Zaharie was the pilot on those 2 flights.
2. Also coincidentally or otherwise, the MAS avionics workshop suffered a fire, the first in its history, on March 26, 2014 which was one day after the authorities proclaimed the plane had ended up in the SIO (on March 25, 2014).
https://weechookeong.com/2014/03/26/azhari-explain-mysterious-fire-in-avionic-shop-of-mas/
3. The version of the RMP Report released online contained a reference to a 45 minute phone call between an MAS aircraft mechanic LAME and Captain Zaharie in February 2014.
4. This version of the RMP Report also had this same LAME attempting to call Captain Zaharie several times in the hours after the announcement by the Malaysian authorities that the plane had gone missing.
5. The date of the 45 minute phone call was given as Feb 2, 2014 but given the doctoring evident in the Report, the real date could have been February 22, 2014.
6. Can I ask you this question, if something had occurred on either the Feb 21 or Feb 22 flight, would the crew have to report the occurrence to an international aviation authority, in addition to reporting to MAS or the Malaysian DCA or other Malaysian authority?
@Oleksandr said, “It looks like the AFDS would roll the plane to wings level as the bank angle is less than 5 deg, but HDG/TRK HOLD would not be engaged because of the ADIRU failure (if a new reference heading is manually entered into the ADIRU by the crew, HDG HOLD could become functional again).”
I’m not sure I understand your exact question. Without the ADIRU, the A/P would disengage and the control would be normal mode. (As you say, HDG HOLD can be entered if the heading is entered via the CDU on the POS INIT page.) In normal mode, if the plane was in a bank of 3°, the bank would not be restored to zero without pilot input. The yoke position is commanding roll rate.
@Don: thanks much. Two points:
1) I can’t use GE to establish elevation of radar, because I don’t know heights of towers, if any, in use on March 8, 2014. For example, the radar tower at the Car Nicobar base seems to have been around 200 feet high at the time of the 2004 Tsunami – I know this only because it became mildly famous for saving the lives of some 200 military family members’ lives, who managed to clamber up it moments before the ocean swept in.
2) I won’t yet take your word on the range imposed by technology – partly because I suspect you don’t know for a fact what IAF capability actually was in March, 2014 – your specs, to me, jive with neither the archipelago’s military mandate to fully cover its FIR nor other sources I’ve canvassed – but mostly because I’m simply supplementing Duncan’s work – which focused on establishing line-of-sight-based range LIMITS, irrespective of the many potential practical limits of topography, technology, policy, or policy adherence.
If I assume stronger technology, at the top of a 200-foot tower located at the Car Nicobar airport, then I do get a range ring that (just) covers out to the SE corner of Indian airspace (6N, 94 25’E). This jives with the Indian government’s official statement reported in the Times of India on March 17, 2014: “We had also made it clear that the aircraft couldn’t have entered Indian airspace without being detected.” (While WSJ reporting shortly thereafter differs, I give all reports coming out of Nation A quoting an unnamed “official” from an unnamed nation (could be A, B, or C) speculating on POSSIBLE weaknesses in Nation B’s coverage…[pause for breath]…their due regard. It’s more of a general policy, with me.)
Others have fed me info privately – much obliged. Anyone else want to chime in on elevations including tower height, or on known IAF technology as at March, 2014?
@Niels,
If the electronics does not drive the crystal at its natural resonant frequency, then the mechanical vibration imparted to the water will be nearly nil. The crystal is a high-Q device and will only vibrate with large amplitude within a very narrow frequency band. The patent you referenced says: “Upon activation, oscillator 24 produces a signal having a preselected output frequency which matches the natural resonant frequency of the piezo-ceramic crystal 34 to provide maximum electro-mechanical conversion efficiency.” In other words, if the electronics don’t drive the crystal at a frequency very near its natural mechanical resonant frequency, the electro-mechanical conversion efficiency will be very poor, and the device will not be heard at any distance. In addition, it is impossible with available technology to hear one of these ULBs (even if working perfectly) located at 3-4 km depth with a hydrophone within a few hundred meters of the sea surface.
This subject has been debated and debunked years ago.
@DennisW,
You said: “I think it is the dimensions of the beacon metal “cylinder” that determines the frequency of oscillation. The frequency is specified as 37.5 kHz +/- 1 kHz. That is a very coarse range, and not something determined by a piece of ceramic. The ceramic simply “rings” (imparts energy) to the beacon case.”
I believe the coarseness of the frequency spec is to allow mass-manufactured crystals to be used without individual tuning. No ULB is required to operate at all frequencies within the spec – just one of them.
The transmitted frequency is almost completely determined by the piezoceramic material and dimensions, not by the electronic circuit or the metal case dimensions.
@DrB
“The transmitted frequency is almost completely determined by the piezoceramic material and dimensions, not by the electronic circuit or the metal case dimensions.”
Could be. I truly am not sure. My guess, however, is that you could hit the metal cylinder of the ULB with a spoon, and it would be just as good as the internal electronics.
@Alex Siew:
If something came to the attention of the pilots during a flight, it would be written up in the aircraft’s Technical Log and either rectified by the engineers or written up as a deferred defect before the aircraft flew again. If rectification was expected to take some time, then a scheduled A check might be brought forward to take advantage of the downtime.
…if something had occurred on either the Feb 21 or Feb 22 flight, would the crew have to report the occurrence to an international aviation authority, in addition to reporting to MAS or the Malaysian DCA or other Malaysian authority?
No. Normally a report would be filed with the airline’s safety department in the first instance. If the incident is classified as ‘serious’ (as defined in legislation), the report would then be forwarded to the Malaysian DCA for further action.
Brock
The Indian forces have deployed a Bharat Electronics ‘Rohini’ 3D Radar. Their product spec lists its range.
The ground elev for the ‘Rohini’ at Car Nicobar is 14m, while the location I noted in the vicinity of Port Blair/INS Utkrosh is 38m.
I’d estimate the ‘Rohini’ antenna height above ground at approx 8m.
@Victor,
Extracts from FCOM:
4.10.3:
In flight, with the autopilot disengaged and both flight director switches OFF, the first flight director positioned to ON engages the flight director in:
– heading hold (HDG HOLD) or track hold (TRK HOLD) as the roll mode, or if bank angle is greater than five degrees, attitude hold (ATT)
– vertical speed (V/S) or flight path angle (FPA) as the pitch mode.
4.20.6:
ATT – (engaged) – When the autopilot is first engaged or the flight director is first turned on in flight, the AFDS holds a bank angle between 5 and 30 degrees and will not roll to wings level. If bank angle is less than 5 degrees, the AFDS returns to wings level (HDG HOLD or TRK HOLD). If the bank angle is greater than 30 degrees, the AFDS returns to 30 degrees of bank
11.20.4:
The following functions are inoperative after failure of the inertial reference portion of the ADIRU:
– LNAV
– VNAV
– TO/GA
– LOC
– GS
– FPA
– TRK HOLD/SEL
– HDG HOLD/SEL*
* – This function is operative when standby magnetic compass heading is entered on the POS INIT page.
——–
Now put these citations altogether. My question is: what would happen if in flight, with ADIRU failed and the autopilot disengaged and both flight director switches OFF, the first flight director positioned to ON?
My understanding is that in this case AFDS rolls to wings level as the bank angle is smaller than 5 deg. However, HDG/TRK HOLD would not be subsequently engaged, and the plane would permanently stay in the ATT mode at zero bank angle. SAARU provides sufficient data for this. Yes or no?
DennisW, DrB & all;
The ULB pinger frequency circuitry is designed on the premise of being “extremely” robust. Crystals are noted as NOT falling into that category. Therefore, the frequency constraints are built around a well designed Capacitive / Resistive circuit.
This means that earlier statements reported in the media regarding the frequency of the pingers apparently detected during the Wallaby Plateau debacle were not even vaguely factual, they were grossly untrue.
@BarryC
As @Brian Anderson pointed out the, based on the youtube ULB deconstruction video there seems to be a tuning fork resonator involved in the electronics, which surprises me also based on (mechanical) robustness criteria.
I expected (also on the base of the original patent) a timer IC with RC components for the oscillator part.
@DrB
The drop in resonance amplitude if you drive it say 10% off from the resonance frequency of course depends on the Q-factor. It matters a lot if the Q-factor is around 10, or in the hundreds. Q factors are notoriously difficult to predict, so IDK. There seems to be a ring-piezo involved driving the housing (from the ULB deconstruction video)
Concerning the range you may have a valid point. Based on theoretical considerations (damped spherical propagation, noise estimates) I estimated detection limit in low wind conditions at 5-6 km, but this may be too optimistic if we follow what people in the field tend to advise based on experience.
Anyway, as said before, drift analysis now also counter-indicate any direct relation with MH370 at that location (S21).
In terms of alternative explanations I find the “drifting fishing nets” also a rather unlikely (the ocean is big, so this would be another strange coincidence). I now tend towards the explanation given by the US Navy representative that the pings somehow were generated on-board the Ocean Shield or in the detection equipment itself. Sounds still a bit strange to me, and would be rather clumsy (not sure that is the right term) if true…
http://edition.cnn.com/2014/05/28/world/asia/malaysia-airlines-pinging/
@Oleksandr:
“Now put these citations altogether. My question is: what would happen if in flight, with ADIRU failed and the autopilot disengaged and both flight director switches OFF, the first flight director positioned to ON?
My understanding is that in this case AFDS rolls to wings level as the bank angle is smaller than 5 deg. However, HDG/TRK HOLD would not be subsequently engaged, and the plane would permanently stay in the ATT mode at zero bank angle. SAARU provides sufficient data for this. Yes or no?”
The aircraft will not return to wings level without pilot input if the autopilot is disengaged. The magnetic heading must first be entered via the FMC. The autopilot can then be re-engaged.
@Andrew,
Do you mean that switching FD to ON will cause no effect in such a situation? What is happening between switching FD to ON and entering the magnetic heading?
@Niels said;
“In terms of alternative explanations I find the “drifting fishing nets” also a
rather unlikely (the ocean is big,…”
Within the aerial search image data that Nihonmama obtained via FOI from the
Australian Govt, there is one picture of an aggregration of what appears to be
a handful of net floats, possibly netting & ropes and other unidentified items.
@Oleksandr asked, “What would happen if in flight, with ADIRU failed and the autopilot disengaged and both flight director (F/D) switches OFF, the first flight director positioned to ON?”
First, I don’t trust the PMDG 777 software to properly model what would happen if the inertial unit in the ADIRU failed other than the behavior would be anomalous.
Suppose the ADIRU is working in your scenario. The left and right flight director switches activate the flight director steering indications on the corresponding PFD. When you engage the F/D when the plane is in a bank greater than 5°, the mode entered is ATT, and the steering commands are consistent with holding the bank angle. If you engage the F/D when the plane is in a bank less than 5°, the steering commands direct you to level the wings. Essentially, the F/D is directing you to do what the autopilot (A/P) would automatically do if it were engaged.
If you are asking what happens if the ADIRU has failed, the bank angle is less than 5°, and the A/P is engaged, I don’t know for sure. I don’t think it would enter ATT mode because the bank angle is less than 5°. I don’t think HDG HLD mode is entered because that mode is inoperative without the pilot entering the heading on the POS INIT page of the CDU. Maybe @Andrew knows the answer.
@Oleksandr and @Andrew: I see @Andrew answered as I was preparing my response. I think there is confusion about the function of the flight director. It provides steering commands; it is not a substitute for the autopilot.
@Victor,
My question is exactly with regard to what you answered you didn’t know. Based on 11.20.4 of FCOM it looks like certain AP modes are still available even if ADIRU fails, particularly the ATT roll mode (and HDG HOLD after the input of magnetic heading) and V/S pitch mode. And these modes are consistent with data available from SAARU.
Generally I see only 3 possibilities:
1. The plane becomes unstable and crashes despite FD is switched ON after it was OFF.
2. Nothing happens, and the plane continues flying in the state it was flying before (e.g. bank angle stays 3 deg in my example; the altitude and speed are maintained).
3. AFDS rolls to wings level and the plane continues flying in the ATT mode at zero bank angle as HDG HOLD function is not available. I don’t see any principal difference between maintaining, say 6 deg bank angle (>5 deg) or 0 deg bank angle (after rolling from 3 deg to 0 deg as in my example).
@DrB: I looked over your sequence to produce the holding speed. If I understand correctly what you are proposing, it won’t work. The speed is reduced to holding speed when not in LNAV, in VNAV, and when PPOS is selected as a hold point. However, once LNAV is engaged, the hold pattern begins (which includes traveling back to PPOS).
@Don: thanks again. Your claim conflicts with the Indian government’s claim that, if MH370 entered Indian airspace, they would have detected it. The technical limits of military capacity are notoriously guarded secrets; that’s why I never asked anyone for it, and see no point in debating anyone on it. Your info could easily be inaccurate, insufficient, or outdated.
So I am going to plot max coverage out to the FL(350) horizon – same as all the other radar sites Duncan plotted – and let readers make their own assessment.
(If I were to predict a single installation in the region that WOULD have long range radar, it would be Car Nicobar, perhaps supplemented by tethered or airborne assets. Patrol of the Malacca Strait is an explicit strategic priority. But my opinion and a toonie gets you a Tim’s – same as yours.)
@Neils
“The drop in resonance amplitude if you drive it say 10% off from the resonance frequency of course depends on the Q-factor. It matters a lot if the Q-factor is around 10, or in the hundreds. Q factors are notoriously difficult to predict, so IDK. There seems to be a ring-piezo involved driving the housing (from the ULB deconstruction video)”
The Q factor in this case is related to the driven element, the housing. Aluminum shells typically have a Q in the range of fifty to a hundred.
http://asa.scitation.org/doi/full/10.1121/1.4721647
A guitar by contrast typically has a Q in the range of 10 to 30. In both cases it is the resonance of the housing (guitar body or aluminum cylinder) that transfers energy to the medium (air or water). An electrical circuit has no ability to transfer mechanical energy to any medium. You need a speaker (some moving part) for that purpose. In the case of the ULB the speaker is the aluminum cylinder. Maximum energy is imparted to the water at the principle resonance frequency (or a low order harmonic) of the aluminum housing.
@Oleksandr:
1. Switching on the F/D will not level the wings. That requires A/P. F/D provides steering indication on the PFD.
2. Your (1) should not occur if the control law is “normal”, which it should be able to maintain with the SAARU functioning.
3. Your (3) would creating a new sequence of modes in which the A/P levels the wings and maintains zero bank in ATT mode. If that exists, I have never seen reference to it.
4. If A/P is not engaged after the failure of the ADIRU, then a neutral yoke position would be the normal control mode in which the roll rate was zero, and the 3° bank would be nominally maintained.
@Brock: There were a handful of articles that have appeared in which it was claimed that the Port Blair radar does not operate at night. For instance,
http://defenceupdate.in/andaman-nicobar-islands-light-chinese-actions-south-china-sea/
“The failure of India’s civilian bureaucracy to perceive the geostrategic significance of the islands is obvious in a way that the main radar station at Port Blair is turned off each night. At a time when the Malaysian government looked for data about the missing MH370 from India there was no data for sharing.”
@Victor,
1. “Switching on the F/D will not level the wings”.
Then how do you interpret FCOM 4.10.3 and 4.20.6 I cited above? Nothing to do with the PFD. FCOM, however, does not state whether pushing AP is required, or AP would be automatically engaged after that. Note that FCOM explicitly states the AP OFF as a pre-condition.
2. “Your (1) should not occur if the control law is “normal”, which it should be able to maintain with the SAARU functioning.”
Agree. But “Should not” or “will not”?
3. “Your (3) would creating a new sequence of modes in which the A/P levels the wings and maintains zero bank in ATT mode. If that exists, I have never seen reference to it.”
That is what I have been trying to clarify for more than a year. Note that HDG/TRK HOLD is engaged only after wings are leveled. ATT is a temporal mode during the leveling process, when the bank angle gradually changes from the initial x deg (x<5 deg) to 0 deg. The data provided by the SAARU is sufficient to perform this operation.
4. "If A/P is not engaged after the failure of the ADIRU, then a neutral yoke position would be the normal control mode in which the roll rate was zero, and the 3° bank would be nominally maintained".
Then again, how do you interpret FCOM 4.10.3 and 4.20.6, which do not require pushing the AP button, only switching FD to ON?
If we assume that your #4 is correct, then any bank angle close to 0 could be maintained. That would also provide possibility for a curved path, also in the ATT mode.
Brock,
“ your claim conflicts with Indian government’s claim”
Just to be clear, I have made no ‘claim’ concerning Indian radar capabilities. You asked for information pertaining to the location of the Indian military radar assets on the Andaman & Nicobar territory. I simply provided what I know.
Don
@Oleksandr: Responses to your responses:
1. Engaging the F/D in HDG HOLD, for example, does not mean that heading will be automatically held. Rather, steering indications in the PFD are given that if followed would result in holding the heading. F/D is not an alternate to the A/P. This is easily verified in FSX, which I have done many times.
2. If systems are properly functioning other than the ADIRU, the flight will be stable and in normal law.
3. You claim that HDG HLD is entered only when the wings are level. This is incorrect. With the F/D off, if I engage the A/P in a 3° bank, the mode is immediately HLD HOLD. The target heading is now constant,and the bank is controlled to maintain this heading.
4. I think the question you really should be asking is this: In normal mode and no A/P, how well is bank angle maintained? I don’t know the answer other than to say the target roll rate is zero at the neutral yoke position.
@Andrew,
Many questions have been posed to you by others, many of which are purely hypothetical. Can I ask for your views on some empirical observations about MH370:
1. The last 2 ADS-B transmissions from MH370 at 1720 and 1721 UTC showed altitude of 0 Ft, a drop of 35,000 Ft on the face of it from the preceding ADS-B transmissions showing 35,000 ft.
2. These last 2 ADS-B transmissions also had the speed and heading pretty much constant at 470+ knots and 40 degree respectively, although the plane had a dramatic slowing (to 200+ knots) and was turning (from 25 degree to eventually 59 degree), in that period of time.
https://www.reddit.com/r/MH370/comments/43eluy/the_heading_of_mh370_at_172113_utc_when_the_ssr/
3. In addition, Mode S had dropped off at 17:20:36 UTC, 37 seconds before the loss of the other modes at 17:21:13 UTC.
I am a layman but surely the foregoing are all indications of the systems on MH370, a fly-by-wire Boeing 777, having gone ‘haywire’, a manifestation of cascading system/electrical failures? Or are such happenings consistent with intentional human conduct whether of the crew or otherwise?
@Victor,
Re: “You claim that HDG HLD is entered only when the wings are level. This is incorrect.”
FCOM 4.10.10 with regards to HDG/TRK HOLD Switch, states: “The AFDS commands wings level and holds the heading or track established when wings level is established”. The keyword is “when”.
FCOM 4.20.6: “HDG HOLD (engaged) – The AFDS holds the present heading. If turning, the AFDS holds the heading reached after rolling wings level.” The keyword is “after”.
FCOM 4.10.1 “if either flight director switch is ON, the autopilot engages in the selected flight director mode. if both flight director switches are OFF, the autopilot engages in: heading hold (HDG HOLD) or track hold (TRK HOLD) as the roll mode, or if bank angle is greater than five degrees, attitude hold (ATT)”
I’ve seen similar statements in other documentation.
Not sure if there is a difference caused by a sequence of actions, or this is a limitation of FSX software. I suspect you engaged the AP when FD switches were OFF and bank angle <3 deg, so you did not see the "ATT". Otherwise what you stated is inconsistent with FCOM.
@Oleksandr: No, you are misunderstanding. What I am saying is aligned with the FCOM.
1. With the F/D off, if the A/P is engaged when in a bank greater than 5°, the A/P mode is ATT and the bank angle is maintained.
2. With the F/D off, if the A/P is engaged when in a bank less than or equal to 5°, the A/P mode is HDG HOLD. Wings are brought level and the heading is maintained. But the A/P mode is never ATT, even before wings are level.
Where do you see words indicating that the A/P mode changes from ATT to HDG HOLD as the wings are leveled? Perhaps this is semantics. You are calling the wing leveling that occurs in HDG HOLD as ATT mode, even though the bank angle is changing. After engaging the A/P with a shallow bank, even when the wings are not yet level and the heading is still changing, the A/P mode is still HDG HOLD.
@Oleksandr
It’s gone silent for now on your drift-model which is fine ofcourse.
Everything needs its time and space.
Still I want to ask you when you expect to be able to publish your report.
I realy like to know in more detail the methods and data you used and I think I’m not the only one.
I think your approuch in deviding the 7th arc in segments is a very good approuch. It’s like a wide beam of a search-light moved along the arc on a fixed angle lightening the debris locations but also all locations nothing showed up till now.
In this way you can roughly find the spot where the search-light shines on most of the found debris. This must be the spot (area) where the plane came down.
But before jumping to ‘conclusions’ ofcourse I (we) need to see your report first.
@Victor,
Yes, these your 2 lines are consistent with FCOM. If you agree that heading, which is maintained, is the heading reached immediately after wings are leveled, but not before, then we are on the same page. And yes, you are right that it should not be the ATT when bank angle is changing. However, heading is also changing.
To complete your list, and what I would actually like to know is:
3a. With the F/D off, A/P disengaged, ADIRU functional, F/D is switched ON when in a bank greater than 5°.
3b. With the F/D off, A/P disengaged, ADIRU failed, F/D is switched ON when in a bank greater than 5°.
4a. With the F/D off, A/P disengaged, ADIRU functional, F/D is switched ON when in a bank less than or equal to 5°.
4b. With the F/D off, A/P disengaged, ADIRU failed, F/D is switched ON when in a bank less than or equal to 5°.
@Oleksandr: F/D is not like A/P. It is steering and pitch indication, which a pilot may or may not choose to follow. (I find it very helpful on takeoff to help with pitch before A/P is engaged.) Perhaps you can continue this discussion with @Andrew.
@DennisW,
In your example, the metal housing is the speaker cone, but the piezo ring is the speaker driver.
The fact is that no metal housing such as used in the ULB will have a resonant frequency anywhere nearly as high as 37.5 kHz. That is 2-3 times higher than the highest audible frequency. Now take any metal object you can find that is about a f4-12 inches long and thunk it with your spoon. You will get an audible ringing that is probably about several hundred Hz or less than a kHz. Yo probably don’t have anything at home that is above ~1kHz. Now ask yourself, how do I raise the resonant frequency by a factor of 30! Well, for the same material it has to be 30 times smaller, or a fraction of an inch in size. For much stiffer materials than metals, such as piezoceramics, the size can be larger, an inch or two, to have a 37.5 kHz resonant frequency.
The bottom line is that the metal housing provides a waterproof “speaker cone”, and it is compliant enough to allow the ringing ceramic to vibrate the metal diaphragm and therefore create ultrasonic waves in the water.
Another question to ask is why is a different crystal used for each transmit frequency? If this were not so, you could simply tune the electronic driver to any frequency within a reasonably wide band you wanted. In addition, you could transmit information by FM. yet, these devices don’t do that. The frequency is not adjustable once a specific crystal is installed. Information transmission by pingers is done by pulse coding and pulse period modulation, not by frequency modulation.
@BarryC,
You said: “The ULB pinger frequency circuitry is designed on the premise of being “extremely” robust. Crystals are noted as NOT falling into that category. Therefore, the frequency constraints are built around a well designed Capacitive / Resistive circuit.”
This is untrue. The piezoceramic rings are quite robust. That is why they are used in a box that has to survive an aircraft crash in order to be useful.
You also said: “This means that earlier statements reported in the media regarding the frequency of the pingers apparently detected during the Wallaby Plateau debacle were not even vaguely factual, they were grossly untrue.”
Again, this statement is untrue. The frequencies reported are commonly used in oceanographic research and fishing. I have independently analyzed a recording, and the frequency and pulse period exactly matched what was being reported. The frequencies detected and reported are commonly used and were accurately measured. They had nothing to do with the ULBs, however. I think it is extremely unlikely that the sources of the pings (7 different events in different locations)were something local to the ship (or aircraft) making the detection. The pingers were most likely locator beacons drifting along with unrecovered fishing nets and long lines. The batteries in these devices last many months or even years, so the gear could have been lost up to thousands of miles from where they were detected.
@DrB
“The fact is that no metal housing such as used in the ULB will have a resonant frequency anywhere nearly as high as 37.5 kHz. That is 2-3 times higher than the highest audible frequency.”
Bobby, Bobby, Bobby,…
The aluminum spheres used in the experiment I linked to had a radius of 3″ (thickness 1/8″) and a resonant frequency in the region of 16kHz. You are completely off base in your physical model.
No matter. I am done arguing about it. It makes no difference to the problem at hand.
@DrB
FWIW, people consider me to be an excellent classic guitarist. I play a Ramirez I obtained obtained before Brazil nationalized their rosewood industry. You cannot get rosewood of instrument quality anymore. My Ramirez has a lowest fundamental of 110Hz.
The fundamental of the ULB housing is determined by the diameter. It oscillates in the radial mode. The diameter is much less than the 6″ diameter of the spheres in my reference, and the fundamental will be significantly higher than 16kHz. Also, aluminum is very stiff (brittle) relative to say steel. It would be difficult to excite the cylinder with much amplitude except near a resonance.
@all,
I am exercising my Fuel Model #2 to find out which combinations of speed and altitude are consistent with the military radar track and with fuel exhaustion at ~00:17.
I will assume ISAT +10C everywhere for simplicity, 1.5% average PDA (from the MH370 Flight Brief) , and R engine Fuel Flow 1.5% greater than L engine flow (from Factual Information).
Here are the cases I have identified so far to be run:
A. LRC (ECON 180) from 17:24 onward at FL250-390 every 1,000 feet,
B. LRC at FL350 from 17:24 to 18:36, followed by ECON 52 from 18:36 onward at FL250-390,
C. LRC at FL350 from 17:24 to 18:36, followed by MRC from 18:36 onward at FL250-390,
D. LRC at FL350 from 17:24-18:36, then Holding thereafter at FL15-390,
E. LRC at FL350 from 17:24-18:36, then 250 KIAS thereafter at FL15-390,
F. LRC at FL350 from 17:24-18:36, then 220 KIAS thereafter at FL15-390,
G. LRC at FL350 from 17:24-18:36, then INOP-LRC thereafter at FL100-270,
H. LRC at FL350 from 17:24-18:36, then INOP-Holding thereafter at FL15-250,
I. LRC at FL350 from 17:24-18:36, then Holding until 19:36 at FL200/150/100, then LRC thereafter at cruise FL TBD (adjust to minimize endurance error), and
J. LRC at FL350 from 17:24-18:36, then 250 KIAS until 19:36 at FL200/150/100, then LRC thereafter at cruise FL TBD (adjust to minimize endurance error).
The first 8 cases assume only one speed change occurs after the radar track ends. The next 2 cases assume a second speed change just before 19:41. The idea here is that there is a ~1 hour long loiter at lower altitude, speed, and fuel flows, followed by a higher speed route from 19:41 until 00:17. It is already clear that this scenario can produce zero endurance error. However, it must also satisfy the BTO/BFO for 19:41 onward to be considered as a candidate route.
Does anyone have any other speed/altitude scenarios they would like me to examine?
My initial results show no ECON mode alone can fly that long.
Interestingly, Best Holding after ~18:36 has two solutions – one at FL390 and one way down low at FL20 (shades of Kate Tee!). The speed at FL20 is quite low, so there may be no BTO/BFO solution for that case.
I will also provide some average speed numbers in addition to endurance errors.
250 KIAS after 18:36 also shows zero endurance error at ~FL230.
My goal in this exercise is to reduce the number of speed and altitude combination from several hundred possibilities to hopefully just a handful of cases that have close to zero endurance error. Then, some of these can possibly be eliminated using BTO/BFO errors. Whatever is left should then be scrutinized in terms of lateral navigation possibilities to see if a route solution exists that also satisfies BTO/BFO.
@DennisW,
You said: “Also, aluminum is very stiff (brittle) relative to say steel.”
Not so. Young’s Modulus of Elasticity for aluminum is 69 GPa. Structural steel is 200 GPa. Thus steel is about 3X stiffer than aluminum, not the other way around.
You also said, “It would be difficult to excite the cylinder with much amplitude except near a resonance.”
If that were true, consumer speaker frequency responses would be limited to a few tens of Hz because the speaker cones have very low resonant frequencies. Instead, they are compliant with being driven (by a driver) at frequencies orders of magnitude higher than the cone/diaphragm resonant frequencies. To my knowledge, there’s only one speaker that has > 15-20 kHz response. Guess what, it is a piezoceramic tweeter!
@ALSM,
You said:”However, the audio oscillator is driving a crystal (the acoustic output device) with a resonate frequency nominally equal to the audio oscillator frequency. I wonder if the crystal will have any influence on the frequency, even if it is not part of the oscillator tuned circuit.”
I don’t think the crystal will affect the oscillator frequency in any meaningful way. However, if the electronic oscillator frequency does not match the resonant frequency of the ring (piezoceramic) resonator, you won’t get useful output amplitude/energy coupled into the water.
@DrB
“Not so. Young’s Modulus of Elasticity for aluminum is 69 GPa. Structural steel is 200 GPa. Thus steel is about 3X stiffer than aluminum, not the other way around.”
Damn, I wonder why car manufacturers do not construct springs out of aluminum. Of course, they are mostly mid-west dumb shits. Oh wait. The Euros use steel springs as well. Of course aluminum beer cans have gotten so thin I can wipe my ass with them.
You are completely off base, but like I said, it truly is irrelevant to our problem.
@Oleksandr
@Victor
Sorry I wasn’t able to weigh into the discussion earlier. Oleksandr, the AP and the FD play different roles within the AFDS. As Victor said, the FD provides steering & pitch commands via the FD bars on the PFD, but it has no input to the PFCs and does not control the aircraft. It’s up to the pilot to follow the FD commands by making inputs through the control column (or not!). If the pilot does not make any control column inputs, then the aircraft will not be controlled, regardless of anything the FD might be doing. The AP, on the other hand, uses the same modes as the FD and sends commands to the PFCs to control the aircraft, but it does not provide any steering or pitch commands to the pilot. Switching the FD on or off has no effect on the AP; similarly, engaging or disengaging the AP has no effect on the FD. The AP does not EVER engage automatically.
Regarding your questions above:
“3a. With the F/D off, A/P disengaged, ADIRU functional, F/D is switched ON when in a bank greater than 5°.”
The FD will engage in ATT and either VS or FPA modes (depending on the VS-FPA reference switch selection). The FD will then provide steering commands to maintain the current angle of bank and pitch commands to maintain the current VS or FPA. The AP is disengaged, so the aircraft will not automatically follow the commands.
“3b. With the F/D off, A/P disengaged, ADIRU failed, F/D is switched ON when in a bank greater than 5°.”
The FD will engage in ATT and VS modes (FPA mode is inoperative). The FD will then provide steering commands to maintain the current angle of bank and pitch commands to maintain the current VS. The AP is disengaged, so the aircraft will not automatically follow the commands.
“4a. With the F/D off, A/P disengaged, ADIRU functional, F/D is switched ON when in a bank less than or equal to 5°.”
The FD will engage in HDG HOLD or TRK HOLD (depending on the HDG/TRK reference switch selection) and VS or FPA modes (as above). The FD will then provide steering commands to roll wings level and pitch commands to maintain the current VS or FPA. Once the wings are level, the FD will provide steering commands to maintain the heading that was reached after rolling wings level. The AP is disengaged, so the aircraft will not automatically follow the commands.
“4b. With the F/D off, A/P disengaged, ADIRU failed, F/D is switched ON when in a bank less than or equal to 5°.”
Not sure about this one. HDG HOLD/TRK HOLD are not available with the ADIRU failed (unless a heading has been entered on the FMC POS INIT page). I think the FD will engage in ATT and VS modes. The FD will provide steering commands to maintain the current bank angle and pitch commands to maintain the VS. The AP is disengaged, so the aircraft will not automatically follow the commands.
Hope that helps.
@Victor,
@Andrew,
Victor said: “@DrB: I looked over your sequence to produce the holding speed. If I understand correctly what you are proposing, it won’t work. The speed is reduced to holding speed when not in LNAV, in VNAV, and when PPOS is selected as a hold point. However, once LNAV is engaged, the hold pattern begins (which includes traveling back to PPOS).”
Sorry, Victor, but my understanding of VNAV is very rudimentary and I am not following you. Are you saying that if I set Holding speed in VNAV, that the LNAV Active Route is affected/ignored? You seem to be saying that you can have either VNAV or LNAV but not both at the same time? Am I understanding you correctly?
Perhaps the problem has to do with doing a Hold at PPOS. Obviously that affects lateral navigation and previously entered LNAV waypoints would then be ignored. Is that what you are saying?
If so, then I will ask again if there is a way to set Holding speed while simultaneously using LNAV waypoints in the Active Route (including a HOLD after several intermediate waypoints)?
@DennisW’
Your comments about aluminum springs and beer cans demonstrate your apparent lack of understanding of materials. On this subject your only contribution so far has been misinformation.
@DrB:
The scenario that Victor mentioned previously involved creating a hold at the present position (PPOS). In that scenario, VNAV would command a speed reduction to the best holding speed, and if engaged, LNAV would command a hold at the PPOS. If some other lateral mode was engaged, say HDG SEL, then VNAV would still command the speed reduction, but the aircraft would fly the commanded heading.
If LNAV mode is engaged, then the aircraft will enter the hold. I can’t think of any way to have VNAV command the speed reduction while in LNAV mode, without also entering the hold.
@DrB
“Your comments about aluminum springs and beer cans demonstrate your apparent lack of understanding of materials. On this subject your only contribution so far has been misinformation.”
You could be right, but i doubt it. You need to get out more, and experience real life.
@Victor: the statement from the Indian government, in my view, trumps such reports. They could have said merely that they didn’t see anything – they chose instead the much stronger statement ruling out the possibility of an undetected incursion into their airspace.
I choose to believe that a nuclear power’s radar – on the edge of its domain, jutting into a geopolitically red-hot strait – was, you know, functioning. You can believe otherwise. That’s fine by me.
@DrB: Must be well >5pm somewhere.
@ALSM,
Apparently 5 o’clock comes early to DennisLand.
@Andrew,
Thank you for responding to my question regarding the possibility/impossibility of achieving Holding speed without flying a holding pattern. It seems there is no way to do this on a B777.
As an alternative, one can achieve the currently best Holding speed by having the FMC display it in KIAS and then manually inputting it using the MCP. However, as the aircraft lightens, that speed will be higher than optimum and the endurance will be reduced. I will note that there is a wide excess of endurance (i.e., well beyond 00:17) for Holding speed at cruise altitudes after 18:40. So much so, in fact, that a constant and fairly high KIAS can still match 00:17 fuel exhaustion. The problem with the constant speed routes post-18:40 is that the only one that comes close to matching BTO/BFO is Constant True Heading. As you demonstrated, this is not the normal default after an EOR error, and no one has yet identified a means to achieve CTH that makes any logical sense. So either it didn’t happen (if the pilot was operating capably) or it was a mistake by an impaired pilot. I am reluctant to go down that road at the moment.
The way I see things now, we have two possibilities: (1) there is a Constant Magnetic Heading (or possibly a Magnetic Track) solution that we have not found yet, or (2) there was an extended loiter and then a higher speed straight route beginning before 19:41 (as Victor has suggested).
The difficulty with scenario #1 is that the combined wind and magnetic curvature to the east is quite strong, and I don’t think it is possible to fit the BTOs without a major decline in ground speed during the 22:41 to 00:11 leg compared to the previous legs. The only way I know how to get both the low average speed and the lower last-leg speed is Holding. But, if you can’t get Holding speed without a racetrack, then that scenario can be ruled out.
The CMT and CTH routes are actually quite similar, because on this particular night the wind effects produce post-FMT route curvatures that mimic the magnetic variation. It is a peculiarity I noticed early on, but it may be worth revisiting Constant Magnetic Track (especially if 180.0 degrees). I will see if I can fit CMT with a fixed KIAS, and then check the endurance at that speed to see if it is plausible.
@Andrew,
After re-reading your response, I now see that you are saying one can have the VNAV maintain the optimum (variable) Holding speed but only if a different lateral navigation method than LNAV is used. I guess that is what Victor was trying to tell me, too, but it took a while for it to sink in. That seems to limit the possible lateral navigation choices at Holding speed to HDG SEL or TRK SEL using the MCP, and to CMH or CMT if the switch is set to NORM. That would be an unusual method of flying a B777, but then again, this is a most unusual circumstance. Do you think a fully-functioning pilot would ever set the speed to Holding and the latnav to CMT/CMH (180.0)? That would send the plane south and away from all land, but keep it in the air as long as possible (at that altitude).
It’s the blind leading the blind over the ULB operation. Dumb and dumber.
The 37.5khz frequency is established by a small and very robust monolithic ceramic resonator. As I said before this signal is gated using a small handful of components, likely an IC timer, to produce the pulsed output with a pulse of carrier about 10 mS long and a period of about 1 sec.
The pulsed output drives a tuned circuit (transformer) to develop the drive voltage necessary to excite the piezo ceramic ring which is mechanically coupled to the aluminium tube.
The frequency of the carrier is determined by the monolithic ceramic resonator, not by anything else. To achieve maximum physical energy transfer into the water I imagine that the piezo ceramic ring is designed to resonate best when excited at about 37.5khz, and the tuned transformer is designed to to the same.
Anyhow, who cares at this point. The ULB batteries gave up long ago.
@DrB:
“Do you think a fully-functioning pilot would ever set the speed to Holding and the latnav to CMT/CMH (180.0)?”
No, I can’t think of any sensible reason to do that.
@Alex Siew:
“I am a layman but surely the foregoing are all indications of the systems on MH370, a fly-by-wire Boeing 777, having gone ‘haywire’, a manifestation of cascading system/electrical failures? Or are such happenings consistent with intentional human conduct whether of the crew or otherwise?”
I’m sure there are others with far greater knowledge who have looked at this before, but here’s my take, for what it’s worth. I’m happy to be corrected. The FI report states that the Mode S symbol dropped off the controller’s screen at 1720:36 UTC. Given that ADS-B uses Mode S to transmit data, I’d say it’s likely that any so-called ‘ADS-B’ data received after that time would be suspect and probably generated by FR24, not by the aircraft.
As for the Mode S dropping off before the other modes, I don’t know if that’s indicative of some kind of failure, or simply latency within the ATC system.
@Andrew,
@Victor,
Thanks a lot for these clarifications. Then the next questions is: Can the AP be engaged when the ADIRU fails, assuming that the inertial units of the ADIRU survive?
If my (4b) supplemented by the engagement of the AP is a possible option, then the flight in the ATT mode at a bank angle smaller than 5 degrees is also feasible. Would you be able to conform this somehow?
I think non-zero-bank ATT mode would lead to the possibility to achieve even better agreement of the modeled and measured BTO & BFO than in my earlier ATT-models (the trajectories of the models, which do not account for the moment of forces, terminate around 30S; the trajectories of the models, which account for the moment of forces, terminate at around 25S).
@Ge Rijn,
Still working on the drift report when time allows. I am also currently running random leeway models, and random leeway + random drift angle models to see whether my conclusions stay.
@Oleksandr:
What do you mean by “the ADIRU fails, assuming that the inertial units of the ADIRU survive”?
@DrB
“Apparently 5 o’clock comes early to DennisLand.”
It does, indeed.
Interesting that ICAO is changing the specs for ULB’s to radiate at 8.8 kHz instead of 37.5kHz. Much longer range achievable at the lower frequency. I think this change is scheduled for 2019.
Looking at the Dukane specs the size of their 37.5kHz beacon is 1.3″ diameter by 3.9″ long.
The size of the new 8.8 kHz Dukane beacon is 2″ diameter by 6″ long. Same radiated power spec.
Interesting that the diameter to length ratio has been maintained.
Apparently Dukane does not realize that all they had to do to achieve the lower frequency was to change the ceramic resonator. Why go to all the trouble of making a new (and larger) enclosure?
My guess is that the larger enclosure might resonate at a lower frequency.
@Andrew,
1. As I understand it, FR24 doesn’t generate data, their receivers only record data received from the plane.
2. ADS-B transmissions are sent from the plane every second or so but according to FR24 they typically would only save data on a per minute basis.
3. In the case of MH370, FR24 said they managed to save/extract data every half a minute (at least for the last few minutes).
4. The original FR24 video playback of the flight (seen by millions) had the altitude at 0 ft in the last couple of minutes (1720 to 1721 UTC).
5. FR24 also confirmed on their MH370 blog they logged some data with zero altitude, when asked about the last 2 transmissions with zero altitude.
https://forum.flightradar24.com/threads/7146-Malaysia-Airlines-Flight-Goes-Missing-En-Route-to-China-Flight-MH370/page6
6. Apart from ADS-B transmissions showing a drop in altitude from 35,000 ft at 1719 to 0 ft at 1720 and 1721 UTC, EHM transmissions also showed a similar drop in altitude (described as 40,000 ft, which may be just 35,000+ ft rounded up).
https://www.nytimes.com/2014/03/15/world/asia/malaysia-military-radar.html?_r=0
7. So the plane (through both ADS-B and EHM transmissions), for whatever reason, was reporting 0 ft altitude at 1720 to 1721 UTC.
8. Subsequently FR24 tried to rewrite the narrative, to the extent if I recall correctly, of posting another playback of the flight but this time without the zero altitude at the end.
@Olexandr. Can you tell us what is the lat/long resolution of the OSC data in the model that you are using? I understand that low resolution models might be fine for big-picture modelling. But to understand influence of eddies – particularly over first 2 weeks or so of drift, you need something with higher granularity. From my personal correspondence with CSIRO, I gather their OSC models have ~0.2 degree lat/long resolution (although model accuracy is another question).
@DrB @Andrew
Admittedly we are all guessing on what happened to MH370 and why,
but I would say 180S certainly makes sense as an intentional flight to the SIO.
I did a FS9 flight yesterday, heading 180S from ANOKO. The modest easterly winds above about 12-S tend to push the flight slightly to the west. It is almost a straight flight south as the wind at first negates the magnetic drift to the East. I can see the wind speed and direction on the screen, and I can monitor POSition (exact lat/long) so I can easily see the drift east or west.
The screen also tells me my heading, so if I am set at 180S, but if the wind is blowing me to 183S heading, I could adjust to 177 to get 180S, or if I just wanted to go straight down I could key in whatever heading I wanted below 12-S to negate the eastward drift (wind/magnetic trend) based on watching the exact longitude on the CDU.
I am thinking this is a potentially interesting scenario. It could explain why magnetic paths are so hard to fit, if the pilot was alive and making tweaks below say 20S to minimize excessive easterly drift.
@Oleksandr & @Andrew:
@Oleksandr asked what would happen if the ADIRU failed, the SAARU was operative, the bank angle was less than 5° and the A/P button was pushed.
I don’t know the answer. Hopefully @Andrew does. I don’t think this scenario is in the FCOM probably because SOP would be to enter the heading in the CDU on the POS INIT page before engaging the A/P. My guess is the A/P would engage in HDG HOLD / VS mode, with the HDG HOLD text appearing with a strikethrough, indicating the mode is inoperative. I don’t think the ATT mode would be entered if the bank was less than 5°. I think you will have a hard time finding a definitive answer.
@Oleksandr & @Andrew: In my previous comment, I said that text of an mode annunciation with a strikethrough indicated the mode is inoperative. That is not exactly correct. An amber line through a mode annunciation indicates that the mode is degraded.
@DrB – “thunk”, like the past tense of “think?”
@DrB – I believe that finding a route that meets the BTO/BFO fuel endurance, range and debris finds could be the solution to finding the impact location. Using LRC cruise and holding speed are nice because we have all sorts of fuel flow data in the FCOM forr those but I’ve wondered what would be the motive for changing the speed?
If MH370 was flying ECON52 from the TOC to 17:21, did the PF think, “now I can fly LRC because I don’t have crew costs to consider?” Or why pick LRC, which is designed to gain a few minutes at only a 1% higher fuel cost? Who saves that 1% anyway? If the destination if the middle of the SIO, why set the speed to arrive a little ahead of schedule?
TBill – I was thinking about someone who doesn’t have access to all of the maps, A/P, etc., and who wanted to end in “the middle of the SIO.” Might they continue to the northwest for a while and then just pick 180°F?
@DennisW,
You said: “Interesting that ICAO is changing the specs for ULB’s to radiate at 8.8 kHz instead of 37.5kHz. Much longer range achievable at the lower frequency. . . . Looking at the Dukane specs the size of their 37.5kHz beacon is 1.3″ diameter by 3.9″ long. The size of the new 8.8 kHz Dukane beacon is 2″ diameter by 6″ long. Same radiated power spec. Interesting that the diameter to length ratio has been maintained. Apparently Dukane does not realize that all they had to do to achieve the lower frequency was to change the ceramic resonator. Why go to all the trouble of making a new (and larger) enclosure? My guess is that the larger enclosure might resonate at a lower frequency.”
That is very interesting new information. It would make sense for the the ceramic ring when mounted on the inside of the hollow cylinder end to have a mechanical resonance at the transmit frequency and furthermore to drive it with the electronic oscillator at that same frequency. I would guess that neither component alone (the ring or the enclosure) resonates at exactly 37.5 kHz, only their combination does when mechanically attached to each other. That might explain why the enclosure size scaling factor is an unusual power of the frequency ratio. In the case you described, the cylinder dimension ratio is (2/1.3) = (6/3.9) = 1.538. The frequency ratio is (8.8/37.5) = 0.235 = (1.538)^(-0.30). This is an unusual scaling exponent (-0.30), but the hollow cylinder is a fairly complex shape and again, I don’t think the cylinder itself is necessarily exactly scaled by the frequency ratio, but it should be fairly close to that.
Based on your new information, I would say we were both half right (and half wrong). It’s likely that neither the unmounted ceramic ring nor the empty enclosure resonates at 37.5 kHz, just the combination after assembly.
@DrB
I have also found that the ratio of cylinder thickness to cylinder diameter has a significant effect on the resonance frequency. I have no idea how thick the enclosure is in either the 8.8kHz or 37.5.kHz cylinders.
@Lauren H: A case could be made that after the flight to the south began, MRC (ECON with CI=0) is the most logical speed for flying MH370 into the SIO. The fact that the plane was flown until fuel exhaustion means the intention was to fly as far as possible, and MRC satisfies that. Earlier parts of the flight, before the turn to the south, might have had different constraints.
@LaurenH
“continue to the northwest for a while and then just pick 180°F?”
Well 180°F sounds too hot, but sure 180°S makes possible sense.
@Victor “MRC (ECON with CI=0)”
What approx. speed does that work out to?
Also, does Andrew’s simulator work tend to say the B777 can make those >90 deg Turns without the over-shoot we are seeing in FSX/FS9?
@Victor
I cannot think of one airplane accident where end of flight was consequent to intentional fuel exhaustion. Flight to fuel exhaustion is generally associated with crew incapacitation (eg Helios 552), crew mismanagement (eg LaMia 2933) or airplane defect (eg Air Transat 236). I do not think that it is reasonable to infer intent from fuel exhaustion.
@Mick Gilbert: My point was that if we assume that the diversion was intentional, which I believe it was and you do not, then a decision to fly into the SIO until fuel exhaustion would imply an intention to fly as far as possible, and MRC speed would be a reasonable choice. I was not using fuel exhaustion as evidence that the diversion was intentional.
I can make a long list of reasons why I think that this diversion was intentional, and how this incident differed from other accidents caused by crew incapacitation. You would disagree with most points. Vive la difference.
@TBill: In the Boeing document that @DrB and @sk999 reference, it states “The advantage [of LRC] is that 1 percent of range is traded for 3 to 5 percent higher cruise velocity.” When I compare LRC to (MRC) ECON CI=0 using the PMDG 777 model, I find that velocity ratio of LRC to MRC is 1.04. Note: This is different than the ratio shown in the graph from that reference which plots Fuel Mileage v Cruise Mach number. My recommendation is to take the LRC speed and divide by 1.04 to obtain the MRC speed. @DrB and @sk999 might feel differently.
@Alex Siew:
A few points in response to your points:
”1. As I understand it, FR24 doesn’t generate data, their receivers only record data received from the plane.”
My understanding is that FR24 continues to estimate the aircraft’s position for up to two hours when an aircraft leaves FR24’s receiver coverage. In the case of MH370, wouldn’t FR24 continue to estimate the aircraft’s position if the ADS-B data from the aircraft was lost? That doesn’t explain the zero altitude data, but perhaps it was corrupted somehow?
”4. The original FR24 video playback of the flight (seen by millions) had the altitude at 0 ft in the last couple of minutes (1720 to 1721 UTC).”
As I said previously, the Mode S symbol was lost from the controller’s display at 17:20:36, implying that ADS-B data was lost at the same time. If that’s the case, then where did FR24’s so-called ADS-B data come from after that time? Did FR24 release the actual ADS-B data, or only the data that was used to display the aircraft’s flight path on its website, generated by whatever means?
”6. Apart from ADS-B transmissions showing a drop in altitude from 35,000 ft at 1719 to 0 ft at 1720 and 1721 UTC, EHM transmissions also showed a similar drop in altitude (described as 40,000 ft, which may be just 35,000+ ft rounded up).”
I read somewhere that the NY Times story was later debunked. Frankly, I wouldn’t trust anything put out by a news organisation without independent verification from a reliable source.
”8. Subsequently FR24 tried to rewrite the narrative, to the extent if I recall correctly, of posting another playback of the flight but this time without the zero altitude at the end.”
Perhaps they realised the data was corrupt and simply ignored it.
@Oleksandr
@Victor
“@Oleksandr asked what would happen if the ADIRU failed, the SAARU was operative, the bank angle was less than 5° and the A/P button was pushed.”
Unfortunately, I don’t know the answer either. It might be the case that the AFDC’s do not allow the autopilot to engage (or remain engaged) if a heading reference is not available. That might explain the sequence of actions in the NAV ADIRU INERTIAL checklist, ie “Enter the heading”, followed by “Re-engage the autopilot”.
@TBill”
“Also, does Andrew’s simulator work tend to say the B777 can make those >90 deg Turns without the over-shoot we are seeing in FSX/FS9?”
Yes it does. The following photo shows how the simulator made the turn:
https://www.dropbox.com/s/twfrlyqhi7kokqf/FMT%20at%20IGOGU%20R15nm%20.jpg?dl=0
@Andrew
Thank you nice graphics. That was my interpretation too, but that part of the screen looks a little different than FS9. We have go to a Map view to see the path.
@Victor
I see, so if I set CI=0 I get MRC = about Mach 0.805. So approx M0.81 is best “miles/gal”, whereas LRC about M0.84 is speed/efficiency trade-off.
@Victor
Thanks Victor, when it comes to underlying assumptions we do disagree. And I agree, Vive la difference! However, I think it’s useful for the sake of clarity in making the implicit explicit. Not a big deal at the end of the day.
@TBill:
The following article from Boeing’s now defunct AERO magazine describes the relationship between Cost Index, LRC & MRC in more detail. Interestingly, Boeing estimates LRC in the B777 to be approximately equivalent to CI = 180. The article also quotes typical airline CI values of between 90 and 150, but in my experience CIs of 50-60 would be more typical. It obviously depends a lot on the cost of fuel. MH370 used a CI of 52.
http://www.boeing.com/commercial/aeromagazine/articles/qtr_4_07/AERO_Q407_article5.pdf
A few notes on speeds and cost index that tend to be ignored.
For the conditions of the example shown in the Boeing graph the maximum range is 67 NM/1000kg at Mach 0.826.
99% of maximum range is 66.33 NM/1000kg at Mach 0.842.
However, LRC speed is the lesser of the speed for 99% of max range, M.84 or 325 kIAS, in this case it is M.84.
MH370 used CI=52 for flight planning, but started cruise at M.82, which is less than max range speed.
Similarly, holding speed is either the speed for maximum endurance, or minimum maneuver speed, whichever is higher.
Incidentally, the relation between cruise speed and Cost Index is defined by the variation of Fuel Mileage versus Cruise Speed, and can be derived from it.
@Gysbreght:
“MH370 used CI=52 for flight planning, but started cruise at M.82, which is less than max range speed.”
I’ve always wondered why they were cruising at M0.82 when the normal practice would be to fly an ECON cruise. A couple of reasons that spring to mind are turbulence* or a slot time restriction in Beijing.
*Above FL250, the turbulence penetration speed is 280KIAS/M0.82, whichever is lower. Strictly speaking, the turbulence speed is only required in severe turbulence, but some pilots are in the habit of using it in any kind of turbulence.
“I’ve always wondered why they were cruising at M0.82 when the normal practice would be to fly
an ECON cruise.”
Doesn’t ECON vary aircraft speed in relation to factors like encountered winds and change in
aircraft weight (fuel burnt)? Seems setting an MCP speed would give PIC Shah one less thing
to constantly monitor, thereby allowing PIC Shah to more closely attend to conducting training
for FO Hamid.
@buyerninety:
An ECON cruise doesn’t require any more monitoring than a cruise at a constant Mach no. The ECON Mach no. only changes slowly as the weight decreases and that’s only if the aircraft stays at the same altitude. Also, the difference in Mach no. for a 100kt tailwind vs a 100kt headwind is only about M0.02. If anything, the ECON cruise requires LESS work, because the flight plan calculations are based on an ECON cruise and should more closely reflect the flight’s progress.
@DrB
“Based on your new information, I would say we were both half right (and half wrong). It’s likely that neither the unmounted ceramic ring nor the empty enclosure resonates at 37.5 kHz, just the combination after assembly.”
Yes. I’ll settle for 25% right for me. It appears the 37.5 kHz is directly generated as a pulse train in the ULB. In any case I wrote up my current understanding based on some searching yesterday. Of course, none of this matters any more. It is just for the sake of completeness. The link to the Thomson work (in my writeup) is worthwhile in and of itself. I know you are aware of this work based on your active participation in the comments section.
http://tmex1.blogspot.com/2017/04/underwater-beacon-operation-my-current.html
@Andrew
Thank you, I saw that article, but I was trying to boil it down actual speed numbers for a B777. I think we have done that now.
As far as turbulence, I might think the high winds below 22S could have made for a bumpy ride. That could be a time to go to 280 KIAS or experiment with altitude changes, maybe adjust heading, assuming we had a pilot at the controls.
@Gysbreght, @Andrew, @DrB, @sk999, @TBill:
Help me out. In the mileage figure from the Boeing reference, the speed for a 1% penalty is M.842 and the MRC speed is shown as M.826, which implies that LRC (when not limited by Mach or IAS) would be 1.9% higher speed than MRC. Yet, the text says that typically LRC is 3-5% higher speed than MRC. There appears to be an inconsistency. Either the text is wrong, or the shape of the mileage curve cannot be generalized, or I am not understanding something.
@Victor
Unrelated, but fyi over on Reddit @pigdead has a new thread asking if the Curtin sounds may tend to support McMurdo route end-point, if we say the sounds were related to implosions of equip on board (eg; fire bottles)
@Andrew
Ok. What would be the main factor resulting in the cause of the ECON Mach numbers
varying to the extent described in this post?;
http://www.airliners.net/forum/viewtopic.php?t=751609#p10825907
Victor: “Yet, the text says that typically LRC is 3-5% higher speed than MRC.”
The text is quoting a book from 1965 written for naval aviators – who knows what type of aircraft it is describing. Clearly it overstates the benefit of LRC for Boeing aircraft.
@TBill: The origin of the acoustic event seems to come from the direction of where the McMurdo path crosses the 7th arc at 27S latitude, which is quite interesting. But the distance does not seem to match, as shown in the figure from this blog posting from nature.com.
From the blog post:
***
On 3 September the researchers recovered data from another IMOS station at Scott Reef, off northwestern Australia. It contains a signal at 01:32:49 UTC that the researchers believe could correspond to the sound event they had detected earlier. Combining the data gave a fix on the location of the sound as the geologically active Carlsberg Ridge, midway between the Horn of Africa and India.
The sound signal also had a low amplitude tail, and taken together these two findings suggest that the event was geological — caused, for example, by an earthquake, underwater landslide or volcanic eruption, says Alec Duncan, a scientist in the Curtin University group.
***
So, the researchers that studied the acoustic event do not believe it is associated with the crash of an aircraft.
@sk999: Thank you. We have the LRC table with fuel flow and speed. So, do determine MRC by assuming that LRC is 1.9% higher speed and 1% lower fuel than MRC? Of course, we also know the holding speed and fuel flow, so knowing those three points (MRC, LRC, holding) at a given altitude and weight, and assuming that MRC is the speed for peak fuel efficiency, we can describe the fuel efficiency curve with a 3rd order polynomial.
@All still interested in ULBs
For completeness also this link and a question:
https://www.bea.aero/enquetes/vol.af.447/cvr.ulb.examination.report.pdf
While there finally seems to be consensus developing that the 37.5 kHz is determined by an oscillator circuit driving the output transducer, and where possibly “The 37.5khz frequency is established by a small and very robust monolithic ceramic resonator” the following question rises:
If we assume this is also the case in the DK120, how can we explain the 34 kHz measured in the lab after retrieval of the AF447 cvr?
Victor,
The way I use that curve is as follows. First, I fit a 16th order polynomial, using mach^2 as the independent variable. At any given altitude/mass, we know the hold mach and fuel flow and the LRC mach and fuel flow. I scale the curve vertically and shift it horizontally so that the LRC mach and fuel flow match the actual values. We know the ratio of hold to LRC burn rates, so I find the point on the curve that has that value and adjust the horizontal scale so that that point matches the actual hold mach.
@DennisW,
You said: “I have also found that the ratio of cylinder thickness to cylinder diameter has a significant effect on the resonance frequency. I have no idea how thick the enclosure is in either the 8.8kHz or 37.5.kHz cylinders.”
Yes, the resonant frequencies will go up if the shell is thicker. The two ends might even be different thicknesses so that only one needs to be changed in order to tune the frequency. They must also be fairly thick in order to withstand the high pressure of the deep sea.
Yes, I am quite familiar with Rodney’s work. He and I corresponded voluminously back in early 2014. Be aware that the audio recording we analyzed was a re-recording after the frequency was shifted down to audio range by a mixer. In addition, the re-recording was done inside a room on a ship with an open mike. The modulation you see in amplitude is caused by reverberation off the walls/floor/ceiling of the room. That took us a long time to figure out, because at first we assumed it was a direct re-recording not using a speaker and a microphone.
Re. natural frequency of metal cylinders and spheres:
http://www.cmrp.com/blog/uncategorized/how-to-calculate-the-natural-vibration-frequency-of-a-steel-tube.html
http://www.dtic.mil/dtic/tr/fulltext/u2/626737.pdf
https://en.wikipedia.org/wiki/Acoustic_resonance#Closed
https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19650010314.pdf
@ALSM
Believe it or not Mike I visited all those sites yesterday. It is indeed a complex problem. You will find that Stanford Prof, Dr. Timoshenko, is referenced in virtually all posts of that type. His book “Vibration Problems in Engineering” is a classic. He deals with the ring oscillation in very digestible detail on page 405 or so. Surprisingly the book is available as a free pdf download.
Unfortunately the cylinder problem, especially with constrained ends, is complicated if the length of the cylinder is not much greater than the diameter. You get cross coupling between radial (breathing) oscillations and oscillations in the length direction. When I use Timoshenko’s ring formulas I get resonance frequencies higher than 37.5 kHz for an aluminum case the dimensions of the DK ULB. I finally gave up on it.
@Victor Iannello: “There appears to be an inconsistency. Either the text is wrong, or the shape of the mileage curve cannot be generalized, or I am not understanding something.”
Some care must be exercised when generalizing the mileage curve in the Boeing AERO magazine. The curve is almost certainly for a B777, probably for the GE engine, conditions possibly close to 240t at FL350. At that condition the MRC Mach number
is quite high, the drag rises rapidly for higher Mach numbers, and the milage drops steeply accordingly. At lower weights and altitudes the MRC Mach is lower, and the mileage curve flatter.
DrB has dug up some data in an Airbus document for the A330-300 at 180t, FL310, ISA where MRC is M.708, and the milage curve is flatter as shown in this chart.
Also shown by the blue line is a generalized mileage curve for a hypothetical airplane with a parabolic drag polar, assuming constant engine TSFC.
@Niels,
@Dennis,
The AF447 ULB test report has some interesting findings.
1. They concluded the unit was non-functional as recovered.
2. Their initial test showed a 34 kHz frequency (too low) but with an amplitude reduced by a factor of 30 (hugely low), and the pulse period was 1.3 seconds (too long).
3. The current draw was excessive.
4. After 18 days of drying out, they tested again. This time the frequency was 36.2 kHz (slightly low), the amplitude was reduced below nominal by a factor of 90 (hugely low), and the pulse period was 1.1 s (OK).
The two ultrasound measurements indicate electronics damage leading to off-resonance electronic driving frequency and resulting in extremely low ultrasound output. An X-ray of the ceramic ring did not show any damage.
Does anyone understand the white material in the top cap? It’s not the ceramic ring itself, but it’s not metal either. Looks like Teflon or plastic to me. Is this the part that transmits the ultrasound to the water? It looks to me like the ceramic resonator is the black doughnut shown in the second picture in Step 3. If that is it, then screwing the top cap in will contact the ceramic on the underside of the plastic insert in the top cap. The metallic button in the center is one end of the battery circuit switch that starts the beacon when it is immersed in salt water. Maybe the plastic part is the “speaker cone”.
@Niels/DrB
My take on the AF447 DK120 is that it was either already out of tune on the aircraft or damaged by the crash. The 34 kHz was too far off frequency to effectively drive the piezo ceramic and case which were mechanically tuned to 37.5 kHz. Hence the low to non-existent output. I am not sure what the white gunk is. It is certainly not present in the disassembled photos of other DK ULB’s I have looked at. My assumption is some sort of corrosion.
@Niels/DrB/ALSM
I did notice that the new 8;8 kHz ULB’s will have a pulse repetition rate of 10 seconds rather than the one second rate of the 37;5 kHz ULB’s. Presumably the increased range of the 8.8 kHz signal required the longer time between pulses so that multiple pulses were not detectable to confuse triangulation of location by multiple receivers.
@Kirill Prostyakov,
Thank you for posting the retrieved BFO frequencies from Dr. Holland’s paper. I have update my analysis of OXCO overshoot based on them. There were no significant changes in my findings.
@sk999: Thank you for your explanation. I think you have to be careful generalizing the use of the mileage curve. As @Gysbreght said, the LRC weight is at the higher end of speed (and weight) conditions. That might explain why the ratio of LRC to MRC speeds is only 1.019.
@DrB: Can you explain how you are using the Boeing documents to arrive at MRC fuel flow and speed, as well as fuel flow for other speeds?
@Most
With all respect but what I’m reading here lately is what we would call in Dutch ‘screwing ants’.
ULB frequencies, possible fuel modes, possible flight modes, descents, climbs, FMT’s, winds. All still limited by speculation by absence of proof.
IMO all we factualy have right now is Inmarsat data and radar data that still leave a wide range of possible crash areas after three years of banging all those educated minds on it.
What we actualy have as facts is the debris and the drift data.
Those even have found a most probable crash area around 30/31S.
Nothing the Inmarsat data (and all other speculation) could (and can) ever establish unless more (still secret) data comes available.
Beacon : DK-120 (Ref: ‘cvr.ulb.examination.report.pdf’, text, page 1 )
Battery: 810-2008 (Ref: ‘cvr.ulb.examination.report.pdf’, picture, page 3 )
_ _ _ _ _ _ _
Battery Kit: 810-2008/K , Battery Code: C , Manufacturer Model Number: BR-A
(Ref: ‘DK-Series-Code-C-E-Battery-SDS-Rev-E.pdf’, text, first page )
_ _ _ _ _ _ _
…Product Information Sheet for the batteries used in the Dukane beacons model DK100, DK120,
…with a Battery Code of ‘C’ and in the battery Replacement Kit 810-2008/K. …
The following components are found in a Panasonic Poly-carbonmonofluoride (BR) Lithium Battery:
Positive Electrode_____ Poly-carbonmonofluoride
Negative Electrode_____ Lithium
Electrolyte____________ y-Butyrolactone -Solvent
_______________________ 1,2 Dimethoxyethane-Solvent
_______________________ Lithium Tetrafluroborate-Salt
(Ref: ‘DK2010-9.pdf’ , text, first & second pages )
_ _ _ _ _ _ _
“Does anyone understand the white material in the top cap?”
Lithium Tetrafluroborate-Salt? Sea Salt?
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
“Is this the part that transmits the ultrasound to the water?”
…Theory of Operation…
…mechanical motion that is transmitted to the metal case of the beacon, which in turn,
radiates acoustic energy into the surrounding water at 37.5 kHz.
(Ref: https://www.manualslib.com/manual/41164/Dukane-Dk100.html?page=15#manual
, text, page 15 )
(Above References available via Google.)
Re: Indian radar: I have learned of two additional Indian military bases in relevant locations – both almost due SOUTH of the IN bases at INS Utkrosh (Port Blair, ~11.5°N) and IAF Car Nicobar (~9°N) :
INS Kardip: (Camorta, ~8°N)
NAS Baaz: (Campbell Bay, Great Nicobar, ~7°N)
“Baaz” translates to “Hawkeye” – this easternmost outpost of the IN military was mandated to keep close watch on the Malacca Strait. I bet they have primary radar.
Does anyone have precise coordinates and elevations for radar sited at these two bases?
(Sorry for taking so long to twig to the extent and relevance of Indian assets at precisely the location most central to MH370 path analysis which has raged over these past three years. I had assumed that diligently reading the work of the IG would have plugged me in to all relevant radar sites; it seems I should have been casting a wider net.)
@Ge Rijn
Nothing new out there for quite some time now. I am afraid we are left with what we have. Might as well beat on it, and see if anything pops out. I am not hopeful.
@buyerninety,
Thanks for the reference about transmitting energy to the water via the metal case. That settles that question.
The salt compound you listed is internal to the battery as part of the electrolyte. It is not the white material in the end caps. Apparently those are electrical insulators to allow the salt water activation. If they are PTFE or plastic, the the cylinder is almost an open-ended metal tube with much-less-stiff plastic inserts at each end for insulation and waterproofing.
@BrB
I had assumed you were referring to the white doughy’ deposit’ adhering thereon to the endcap.
Actually, referring to the ‘f-cp090601.en.pdf’ , page 56, figure 22, which displays similar
deposits of a white substance, I think the substance may be for the purpose of thermal
transference, which would explain why it was in evidence particularly around the mid body of
the battery guide.
Cheers
The ULB tube is certainly not open-ended. The aluminium endcaps actually screw into place. The end containing the electronics is completely sealed and the other end, housing the battery has an insulated contact to allow wafer to activate the circuitry. There is also a lot of stuff inside the tube, battery, seals, potting compound etc, all of which would affect the resonant frequency and the Q of the tube as a resonator, if indeed the natural resonant frequency of the tube itself was important.
For what it is worth, I think the resonant frequency of the tube is irrelevant. The tube is just the mechanical link between the piezo-electric ring and the water. It’s analogous to the cone of a loudspeaker. The piezo-electric ring is probably designed to resonate at around 37.5 kHz since this would then ensure maximum mechanical amplitude, and maximum coupling to the aluminium tube.
It is the electronics which establishes the 37.5 kHz and the output is gated to provide the 10ms on burst and the 1 sec period. The output is impedance transformed and coupled to the piezo-electric ceramic ring through a tuned transformer, probably a ferrite potcore.
Water, not wafer…..
@Brian
“For what it is worth, I think the resonant frequency of the tube is irrelevant. The tube is just the mechanical link between the piezo-electric ring and the water. It’s analogous to the cone of a loudspeaker. The piezo-electric ring is probably designed to resonate at around 37.5 kHz since this would then ensure maximum mechanical amplitude, and maximum coupling to the aluminium tube.”
Not worth much actually since DK changed the dimensions of the 8.8kHz beacon case. This was not done casually. It was done for a reason. The case is resonant at the carrier frequency. Without that the acoustic power transferred to the water would be substantially reduced.
@buyerninety:
“What would be the main factor resulting in the cause of the ECON Mach numbers
varying to the extent described in this post?
That kind of speed variation over the course of a single fight would be somewhat extreme. It would only occur on an ultra long haul flight where the aircraft is very heavy at the beginning of the cruise and unable to climb to higher levels later in the flight, perhaps due to ATC restrictions. You would only ever see an ECON cruise speed of M0.78 if the aircraft was flying well below its optimum level. The crew would typically try to keep the aircraft flying close to its optimum level by climbing as the aircraft weight decreases during the cruise. The ECON cruise speed then remains more or less constant at about M0.83-0.84 with small variations for wind.
@Dennis,
At 8.8khz many other components would be larger too. The piezo-electric ring, the pot core transformer, for example, so a larger tube would be necessary to accomodate them. And maybe the battery has different dimensions too.
I agree the ultimate energy transfer into the water would be maximised if the whole assembly was resonant at the desired frequency, but surely it is sufficient to drive the tube with a large piezo-electric ring.
@Brian,
Maybe. But the dimensional change is quite substantial – 37.5 kHz at 1.3″ diameter by 3.9″ length and the 8.8 kHz at 2″ diameter by 6″ length. Hard to imagine that big a change to accommodate what you are suggesting.
The Q of the housing is actually not trivial – on the order of 50 or more. That is a substantial free energy transfer gain.
@Victor,
You asked: “@DrB: Can you explain how you are using the Boeing documents to arrive at MRC fuel flow and speed, as well as fuel flow for other speeds?”
My ECON Model
Based on Boeing publications, the equations I have fit to their data are as follows:
Mach at Cost Index CI relative to LRC Mach:
Mach(CI) = Mach(LRC)*( 0.9830546 + 0.0001307039*CI -0.0000002450332*CI^2 + 0.0000000002128321*CI^3 )
Fuel Flow at Cost Index CI relative to LRC Fuel Flow:
FF(CI) = FF(LRC)*( 0.9758769+0.0001340174*CI )
These equations are valid for CI from 0 to ~350. Of course, the Boeing FCOM table already contains the variation of LRC Mach with weight and flight level.
Using these equations, Mach(CI=0, or MRC) = Mach(LRC)*0.9831 = 0.84*0.9831 = 0.826 (i.e., the same value as in Aero Figure 1). Thus there is a 1.7% increase in LRC speed compared to MRC.
Also FF(MRC) = FF(LRC)*0.976. So there is a 2.4% increase in FF for LRC compared to MRC.
Thus LRC is 1.7% faster than MRC but uses 2.4% more fuel, for a net relative fuel mileage decrease of 0.74%.
You should also note that the actual graphed data in the Aero magazine (Figure 1 on page 25) do not show exactly a 1.0% decrease (as indicated by the label) in fuel mileage (the numbers shown are 66.5/67.0 = 0.9925). Based on the actual numbers plotted, it is a 0.75% decrease. I have used digitized data from the plotted points rather than the label (which I presume was rounded off in order to simplify the concept).
That same Aero article says “However, it is possible to derive a CI for normal cruise conditions that approximates LRC in terms of the cruise speed that results.”
The table they give shows a CI = 180 for B777s. So I use that definition, if you will, of LRC being the speed predicted by CI = 180, although this is not exact. I don’t know if this approximation is the source of the 0.2% discrepancy (between the 1.0% label and the 0.8% actually shown by the graphed data. Could it be that a 1% total decrease in hourly operating cost is achieved with a 0.75% decrease in Fuel Flow?
Now think about the Cost Index. The CI is a scalar times the ratio of $/hr to $/MT, or a scalar times MT/hr, which is simply Fuel Flow if one assumes the operating cost is dominated by the fuel cost. This is not exactly true, but Boeing doesn’t give you any information about the hourly cost besides fuel, so what else can one do?
Now the slope of Figure 1 is NM/MT divided by NM/hr, or hr/MT (= inverse Fuel Flow). Thus the (negative) inverse slope of Figure 1 is approximately proportional to the Fuel Flow and therefore to the Cost Index (~MT/hr) in my approximate method to derive Cost Index. So all you need to get an approximate Cost Index equation is that portion of Figure 1 between LRC (M0.826) and MRC (M0.840). Find the slope at a number of points along the way, take the negative inverse, and then scale the result linearly so CI = 0 at M0.826 (MRC) and CI = 180 at LRC (M0.840). The result won’t be perfect (because Boeing will not publicly release their proprietary equations which include the other operating costs per hour besides fuel). However, it should be accurate at CI = 0 and CI = 180, and it is probably pretty good for intermediate CI’s (like 52).
I generated a general B777-200ER/Trent892 Fuel Flow equation by empirically fitting the Boeing FCOM FF tables for LRC and Holding. I was able to get small residuals (~0.8% RMS). This equation is:
Fuel Flow (kg/hr/engine) = 3.0138E+03
*[ 1 + 3.4504E-03*(W – 2.2828E+02) + 5.0420E-07*(W – 2.2828E+02)^2 ]
*[ 1 + (-1.2000E-03)*(FL -3.2986E+02)+ 3.3961E-06*(FL -3.2986E+02)^2 ]
*[ 1 + 1.0749E+00*(M – 6.8765E-01)+ 1.0108E+00*(M – 6.8765E-01)^2 ]
*{ IF[W + FL>590, (W + FL)/590, 1 ] }
where W is aircraft weight in MT, M is Mach, and FL is Flight Level.
This equation is needed to model Fuel Flow at arbitrary CAS.
@Victor,
In my post above near the middle, please replace ” 0.75% decrease in Fuel Flow” with “0.75% decrease in fuel mileage”.
@DrB: Thank you. I didn’t expect you to provide the entire model, but rather the methodology. Like @sk999, you are using the fuel efficiency curve from the Boeing publication to estimate the fuel efficiency for speeds other than LRC and holding. I think @Gysbreght makes a good point. The speed corresponding to a 1% fuel efficiency would be greater than M0.84 based on the curve, so it is probably limited to M0.84. But even if the LRC speed was not limited to M0.84, the ratio of LRC speed to MRC speed shown in the figure might not be representative of other conditions. I think the trends you present are correct. I’m less certain about the precision. At the same, your models are probably the best we have.
@DrB:
“The result won’t be perfect (because Boeing will not publicly release their proprietary equations which include the other operating costs per hour besides fuel).”
The “other operating costs” (aka “time-related costs”) include items such as flight & cabin crew hourly costs, marginal depreciation & leasing costs, hourly maintenance costs, etc. Boeing can’t release such data, because those costs are unique to each operator.
[VI: Alex, the purpose of this forum is to exchange information that advances our knowledge. You are using this forum as a platform to re-state theories that are based on early press reports and incorrect technical details. If you have new information to present or have specific questions to ask, please do so. However, if you continue to distract the discussion by presenting comments like the one below, you will be banned. This is your last warning.]
@Andrew,
“I read somewhere that the NY Times story was later debunked”.
Were you referring to a comment by CopperNickus on a Reddit thread on this topic?
https://www.reddit.com/r/MH370/comments/3jza8l/difference_between_mode_s_symbol_and_secondary/#bottom-comments
1. The NYT article linked earlier reporting on these EHM exceedance transmissions showing anomalous altitude readings, was on March 14, 2014.
2. A day earlier, on March 13, 2014 the Associated Press had reported to the effect that EHM transmissions were received from MH370 for a ‘short time’ after the transponder went silent.
https://www.bostonglobe.com/news/world/2014/03/13/debris-spot-shown-china-images-says-official/r1Riv5CsBoqfK3Ah2gysQK/story.html
3. These 2 reports were published before the official narrative was first announced and read out to the world, on March 15, 2014, by the Malaysian PM.
4. These 2 reports on the EHM transmissions were never debunked, these EHM transmissions were simply never mentioned again by the mainstream press.
5. For the simple reason these EHM transmissions are not consistent with the official narrative of an intentional diversion of a healthy plane, which plane the authorities would have us believe, continued to fly undetected by radar until at least 0019 UTC.
6. On the ADS-B transmissions, as I said earlier, FR24 confirmed they logged transmissions with zero altitude.
7. They also said ADS-B transmissions would be transmitted every second but FR24 only managed to save/extract data on a half a minute basis for the last few transmissions from MH370.
8. They had the last ADS-B transmission from MH370 at 17:21:03 UTC.
9. The transponder on MH370 was a multi-capable transponder from Honeywell.
10. Capable of responding to Mode A, C and S interrogations from SSR radar and capable of ADS-B (automatic unprompted transmissions of GPS derived position and other data every second).
11. The ‘Mode S symbol’ dropped off at 17:20:36 but that does not mean the transponder had stopped transmitting at such time.
12. From the FR24 data, ADS-B transmissions continued until 17:21:03.
13. The SSR symbol (presumably the 4 digit squawk code) dropped off 10 seconds later at 17:21:13 UTC.
14. It could be the last SSR reply (presumably Mode A) was at 17:21:03 but the symbol ‘coasted’ for 10 seconds before dropping out, as the FI showed the Malaysian radar display system had this 10 second coasting feature, at least in relation to primary radar blips.
15. So the case can be made that the transponder last transmitted at 17:21:03.
16. According to the Associated Press report on March 13, 2014, there were EHM transmissions for ‘a short time’ after the transponder went silent, presumably referring to a matter of seconds.
17. 1 hour and 256 seconds after the last of these EHM transmissions, the GES interrogated the AES, prompting the AES to renew its log-on, the log-on request we see in the Inmarsat datalog at 18:25:27 UTC.
18. Yes, the altitude data was corrupted, just like the speed and heading data, as reported at 1720 and 1721 UTC.
19. Corrupted at the plane’s end, consistent with system/electrical failure precipitated by an event at 1720 and culminating in a total electrical failure by 17:21:13 UTC.
20. With a glide ratio of almost 20:1, the plane glided for 22 minutes before the crew issued a ‘last ditch’ SOS call at 1743 UTC using the left VHF radio which had an independent backup battery, the distress call picked up by the 7th Fleet as reported by China Times, before hitting sea level.
21. The Boeing 777 was designed to float for a period of time after ditching (for ETOPS certification and otherwise) and the evidence shows the upper fuselage of the plane where the LGA was located (aft of door 3) remained afloat until at least 1825 UTC.
22. The plane sank soon after and 1 hour +/- 256 seconds after the AES last transmitted following the 1825 UTC log-on, the GES interrogated the AES and logged off the AES after failing to get a response, at 19– UTC.
23. Thus the reason why SITA logs and the original Inmarsat logs do not show any activity past 2000 UTC.
24. Of course people are at liberty to believe otherwise and that the ‘pings’ subsequently ‘discovered’ by Inmarsat, are for real.
@all
5PM has come and gone in NorCal. No more posts from me until tomorrow.
Bobby Ulich,
Thanks for the fuel model. I coded it up and ran it on the RMP flight plan. You’re predictions (leaving out pda and temp corrections) average 1.2% higher than mine, which is in line with the fact that you derive a lower pda than I do. As one moves away from the tabulated values in the LRC and HOLD tables, the discrepancies grow (typically 1-2%, and in either direction), which is likely due to the fact that I use higher-order polynomial fits for interpolating in both mach and altitude.
Victor, correction – instead of a 16th order polynomial, it’s only 15th order.
@DrB: “Boeing will not publicly release their proprietary equations which include the other operating costs per hour besides fuel”
Boeing doesn’t use any “proprietary equations” to define the cost index, nor does it need to know the time-related costs. As I said earlier, the CI for cruise is enterely defined by the relation of mileage to speed.
For cruise in still air the cost index is given by:
CI = a*(x/y)^2*(dy/dx), where –
CI = cost index in 1000 kg/hr
a = speed of sound
x = Mach number
y = Mileage in NM/1000kg
Optimization of climb and descent for a given CI is more complex but is not proprietary either. There are NASA publications dealing with that problem.
In the above a = speed of sound in knots TAS.
@DrB: “I generated a general B777-200ER/Trent892 Fuel Flow equation by empirically fitting the Boeing FCOM FF tables for LRC and Holding.”
What you are trying to achieve is impossible. For each weight and altitude you have only two speeds, LRC and Holding. From those two points on the speed curve you can’t possibly predict the fuel flow at speeds between LRC and Holding or beyond those speeds.
@Gysbreght said, “CI for cruise is entirely defined by the relation of mileage to speed.”
I agree. Fuel and time costs are only required to know which CI minimizes total cost.
“CI = cost index in 1000 kg/hr”
I believe that is for Airbus. [VI later edit: Actually, Airbus expresses CI in units of (kg/min).] For Boeing, CI is expressed as 100 lb/hr.
For anyone interested: The NASA paper on trip cost optimization I remember, from the time that Honeywell introduced its Flight Management Computer on the market, used Hamiltonians to explain the process.
Mathematics above my paygrade, I’m afraid, but there are simpler explanations of Cost Index.
@Victor Iannello: “I believe that is for Airbus. For Boeing, CI is expressed as 100 lb/hr.”
I just kept it simple. Surely you can convert kgs to lbs?
Apologies, I forgot the minus sign in
CI = – a*(x/y)^2*(dy/dx)
@Gysbreght: We are discussing a Boeing 777 and specific values of CI such as CI=52 and CI=180. For a Boeing aircraft, the units of CI that you presented are incorrect, irrespective of the fact that you “kept it simple”. I politely provided the correct units for those here like @DrB and @sk999 that might care. There is no reason to be snide. Deal with it.
@Victor: That’s why I clearly stated the units for fuel and speed. Nothing incorrect. Come on.
@Gysbreght: You miss the point. Irrespective of your formula, CI=52 does not mean the same thing for a Boeing and an Airbus because different units are implied. The units you supplied are not consistent with how Boeing calculates and presents CI. You did not mention this, so I politely supplied additional information so that @DrB, @sk999, and others would not incorrectly use specific values of CI such as CI=52 and CI=180.
I have tried to keep the tone of the conversation here collegial so we can exchange useful information without the bickering I have observed on other sites. Snide remarks corrode useful discussion. Please formulate your comments with that in mind.
@VictorI: Apologies.
To keep it simple I expressed the equation for CI in the units used in the Boeing mileage chart. I should have added a P.S. explaining the conversion from 1000 kg/hr to 100 lb/hr. No snide intended.
@Gysbreght: Stop it. You know full well that we can all convert 1000 kg/hr to 100 lb/hr without further explanation. What was missing in your comment is the statement that we need to do this conversion since the implied units of CI for Boeing aircraft are 100 lb/hr.
@VictorI: I have already apologized for my omissions. I was wrong in assuming that a reader interested in the subject would be aware of the different units used for CI.
@Thank you, but there is no need to apologize for an omission. For the most part, discussions here have been polite and respectful. Let’s just try to maintain this, and all will be fine.
@Victor
@Gysbreght
Sorry to butt in – for what it’s worth the following document shows Airbus Cost Index calculations in kg/min:
http://www.theairlinepilots.com/forumarchive/concepts-procedures/cost-index.pdf
@Andrew. Thank you, Andrew.
This is a good reference that discusses the implications of using ECON speed for flight planning. The definition of CI for Airbus used therein is consistent with your document. It also confirms that the implicit units of CI for Boeing are 100 lb/hr:
“Since a large number of Flight Management System (FMS) vendors have been established in the market, two different units for the CI are generally used depending on the specific aircraft type. Airbus uses CI values with unit kg/min whilst Boeing defines the CI with 100lb/h (corresponding to 0.756 kg/min).”
@Andrew: Thank you for providing the link to the Airbus “Getting to Grips with the Cost Index”. IIRC that document is the source for the Airbus data I referred to on April 1, 2017 at 11:45 am, and that DrB brought to my attention in a private discussion some time ago.
Re: Indian radar sites at Kamorta and Campbell Bay, Great Nicobar:
It appears the Indonesian navy has a base in Lugu, Simeulue, Aceh, which may also have radar detection capability. An online search of “Simeulue military Lugu” turned up a photo of a ceremony for promoted soldiers, in the background of which seems to be a very large tower. Anyone know exact coordinates and elevations for that one? While Lugu is on the SE shore of Simeulue, a road cuts across the narrow southern end of this small island to an airstrip at the SW shore.
If it is easier: some folks have been passing me links to their source data. That makes good sense: I can look up the data myself, without having to trouble providers with repeated requests. But either way is fine by me.
Thanks in advance.
@Andrew,
@Victor,
Sorry for the late response. Under “ADIRU fails, assuming that the inertial units of the ADIRU survive” I meant a situation, when the ADIRU does not identify itself as failed, but provides erroneous output, similar to the flight MAS 124. Can the AP be engaged in the following situations:
1. ADIRU fails and ADIRU failure is properly recognized (SAARU takes over).
2. ADIRU provides erroneous output, but does not identify itself as failed.
3. ADIRU is depowered (from the EE-Bay).
4. ADIRU is restarted (also from the EE-Bay), but alignment can’t be completed.
@Victor,
Re: “The origin of the acoustic event seems to come from the direction of where the McMurdo path crosses the 7th arc at 27S latitude, which is quite interesting. But the distance does not seem to match…”
Your “McMurdo theory” terminal location was close to my early ATT models terminuses, both close to the “Curtin boom” location, defined as the intersection of the 7th arc and acoustic signal bearing. I have pointed this out many times at JW blog.
If you take a look at the signals recorded at HA01 and RCS, you will find these signals are similar. The amplitude of the signal in question at HA01 is slightly lower than at RCS, as could be expected. Also, the bearing detected at HA01 is consistent with the bearing derived from the delay in the arrival time to HA01 following RCS. There is virtually no doubt that these two signal were generated by the same event.
This is in contrast to the Scott Reef station. Neither shape of the signal, nor amplitude is consistent with HA01 and RCS signals. There is a number of other ‘spikes’. I have no idea, why it was assumed that a particular ‘spike’ at the Scott Reef station was caused by the same event. Furthermore, there is HA08 station near the Carlsberg Ridge, which did not pick the signal, while it should have (ref. to earlier Dr. Duncan’s paper)…
@Oleksandr: Let’s suppose we can use the data from HA01 and RCS to determine bearing but not distance of the event. Let’s also ignore the data from Scott Reef station. I also fully admit that I am not qualified to determine if the acoustic event recorded at Scott Reef is the same as that recorded by HA01 and RCS, so I quoted the statement made by Alec Duncan of Curtin University.
Let’s also assume that the plane crashed near 27S along the 7th arc. Would a crash at that location at around 00:20 UTC produce acoustics that arrive at HA01 and RCS at the proper time? My understanding is that the acoustics arrived at the recording stations about an hour later than implied by a crash at that time and location. If so, are you suggesting that the acoustics were created by wreckage hitting the seabed? I’m not questioning your results. Rather, I am trying to understand what you are proposing.
Recently I started using the following fuel flow model formulation based on the interpolated tables from FCOM, both LRC and non-LRC:
FF = (f0+f1*sqrt(T_a)+f2*V)*0.5*Cd*rho_a*V*V + Ct*(288.15-T_a)
where:
FF is the fuel flow for both the engines in kg/s
f0 = 4.081457225626838e-006;
f1 = 6.905471893682594e-007;
f2 = 5.995291583228123e-009;
Ct = 9.447273177191440e-004;
CD = Cd10 + Cd11*AoA + Cd12*AoA*AoA is the head drag coefficient.
Cd10 = 8.27765957343940;
Cd11 = -7.69902427937333;
Cd12 = 2.283610810632564e+003;
AoA = (2.0*m*9.81/(rho_a*V*V*S_ref) – CL0)/CLa;
CLa = 5.5;
CL0 = 0.29;
S_ref = 427.8;
V is the true airspeed (m/s); T_a is the ambient air temperature (K), rho_a is the ambient air density (kg/m^3), m is the current mass of the airplane (kg), AoA is the angle of attack.
The model assumes that the drag is compensated by the thrust, plus additional energy loss due to the difference between the temperature inside the cabin and outside (the term Ct*(288.15-T_a) improves). It is assumed that the drag coefficient CD has quadratic dependence on the angle of attack AoA. It is also assumed that the weight is compensated by the lift force. Coefficients are found by fitting FCOM tables.
This formulation can be improved by accounting for Mach M (there is a notable effect for M>0.78), but the suggested dependencies of CD on M included the term (1-M^2)^(-0.5), which caused instabilities in my models, so I have ignored it for the time being.
@Victor,
Re: “Let’s also assume that the plane crashed near 27S along the 7th arc. Would a crash at that location at around 00:20 UTC produce acoustics that arrive at HA01 and RCS at the proper time? My understanding is that the acoustics arrived at the recording stations about an hour later than implied by a crash at that time and location. If so, are you suggesting that the acoustics were created by wreckage hitting the seabed? I’m not questioning your results. Rather, I am trying to understand what you are proposing.”
Yes, indeed, the seabed, as discussed many times at JW blog. An engine-rock impact may produce a lot more acoustic noise than engine-water impact at much higher speed. I have talked with several specialists in the sea acoustics, and generally they agreed, but none was able to quantify the effect.
The time is very consistent in my opinion. 1 hour of sinking at the depth of 4 to 5 km – why not?
@Oleksandr: How well does your model reproduce the fuel flow presented in the LRC and Holding tables?
Some time ago I created a similar model, including the effects of Mach number on drag. Knowing Mach number and altitude, Cl was calculated. Cd was derived from representative curves of Cd v (Cl, M). (The Mach number effect is significant for M>0.6.) Drag was set equal to thrust. And then fuel flow was calculated by using thrust combined with a simplified model of the engines. Using this model, I could predict fuel flows in the LRC and holding tables over a broad range of speed, weight, and altitude, but only within several percent. This level of accuracy was sufficient for testing the feasibility of many routes, but I deemed it not accurate enough for determining the feasibility of many of the routes to the SIO, where an accuracy of better than 1% is required.
@Oleksandr: At a descent rate of 4 km/hr, the engine would hit the seabed at around 1 m/s. This speed (and energy) would be equivalent to dropping the engine from a height of 5 cm above the ground in air. It’s hard to believe that this amount of energy would create acoustic waves that could be confused with a seismic event, but I don’t know.
INS Baaz & Kardip.
INS Kardip is a vessel supply & maintenance location serving naval & coastguard operations.
In 2014, Baaz was a barely developed tarmac strip, commissioned into the Indian Naval Service 22mths before the MH370 event. The Indian authorities only set out to procure a radar, as part of the development of Baaz at Campbell Bay, in July 2015.
@Don: thanks again. To conclude “radar=YES” at these islands, I need at least solid evidence of hardware in place, or official attestation of capability. To conclude “radar=NO”, I need at least official attestation of LACK of capability. So my search continues.
Baaz wasn’t born in 2012 – it was merely rechristened. It had been a military base for many years before that. (I’m not for a moment supposing you didn’t already know that; just trying to help readers get a fuller picture.)
Anyone else out there knowledgable re: radar capacity on any islands near Sumatra (Kamorta, Great Nicobar, Simeulue, Nias, or any others we’ve missed) of as of that key date?
@Victor,
“How well does your model reproduce the fuel flow presented in the LRC and Holding tables?”
I used the whole PI.21.3 table and PI.21.4 for the weights of 180 and 200 tonnes. The use of PI.21.4 is somewhat complicated due to the adjustment term, which, I suspect, is rounded up in these tables. The adjustment term is zero for the 200t.
Errors in the total fuel flow using my parameterization above:
RMS error = 0.037 kg/s
max absolute error = 0.074 kg/s
average absolute error = 0.032 kg/s
The fuel flows for 160t and 220t from PI.21.4 can also be included, but this would result in ~20-30% larger errors.
One may also wish to fit LRC table only with the above parameterization. In that case achievable RMS error is 0.026 kg/s (coefficients would be slightly different).
I see that some suggested polynomial interpolations. While it is obvious that very high fitting accuracy can be achieved, a proper care should be taken to avoid possible spurious spikes, which may result in unrealistically low or high fuel flow.
Either way, as I noted earlier, in my understanding LRC tables also implicitly include fuel used to maintain comfortable conditions inside the cabin (e.g. temperature control, aircon, IFE, coffeemakers, etc.). If the cabin was depressurized in a result of an accident or as a result of a malicious act, I think these ‘comfortable’ conditions would unlikely be maintained. It does not make sense to me to assume that passengers were served coffee on their trip to the middle of SIO. In my estimation, altogether this could save around 1,000 kg of fuel, which is approximately 3%. Is there are any sense to achieve a better fitting accuracy bearing in mind this uncertainty?
@Victor,
“hard to believe that this amount of energy would create acoustic waves that could be confused with a seismic event, but I don’t know.”
There are several things you need to keep in mind:
1. Collision of metal with rock vs collision of metal with water: what does practical experience tell you?
2. We don’t know how big could chunks of falling debris be.
3. Entrained water. RR Trent-800 dry weight is 7,484 kg. It’s diameter is 2.79 m, length 4.37 m. Assuming its shape as a cylinder, it could contain 27 tonnes of water on the moment of the impact with the seabed, so that the total “impact weight” would be around 35 tonnes. This means you need to multiply your 5 cm by the factor of 5.
4. The impact could cause landslide, subject to seabed slope.
5. We don’t know how long debris were floating before they began sinking. How long would it take for water to fill empty fuel tanks?
@Oleksandr
You cannot add entrained water to the weight of a sinking object. Open space not entrained with water provides buoyancy. Open space entrained with water is neutral in the water media. You model is like saying that a 8m by 4.4m cylinder of water (contained by aluminum the thickness of a beer can)) sinks link an object weighing 27 tonnes. Duh! You cannot count the water except tot he extent that the lack of water creates buoyancy.
Brock,
The tower in the image you reference above, cited as the village of Lugu on Pulau Simeulue, is a comms tower carrying the XL 3G network onto the island, visible in this press report.
@Dennis,
I should have written entrapped and entrained, if this helps.
But you seem to confuse inertia with buoyancy.
An empty enclosed cylinder of 27 m^3 volume and 7.5 tonnes weight cant sink. It will float. And, yes, if it is filled with water it sinks like a solid object weighting 27+7.5 tonnes. And it will hit the seabed as a solid object of 27+7.5 tonnes having speed of 1 m/s (for example).
Only if you consider a cylinder without bottom and top falling vertically, without drag, it will hit the bed as an object of 7.5 tonnes weight. However, in this case it will have much higher speed.
@Oleksandr
Consider a metal bucket weighing 5 kg that holds 20 kg of water. If you fill it with water and place it in a pond it will sink like a metal bucket weighing 5 kg. You cannot count the water inside the bucket. It is neutral relative to the sinking weight.
@Oleksandr and Dennis. A water filled metal container in water will have a net weight of the container less the metal volume’s weight of water.
The mass of the container underwater includes that of the water inside.
Its speed on sinking will be such that its upwards drag equals its weight. Its momentum on hitting the bottom will be its speed multiplied by its total mass. With a large volume of water it might hit the bottom slowly but with large impulse. More a rumble, unless the bottom is soft as with the lost towfish depressor weight (Operational Search Update 20th April, 2016)
@David
“A water filled metal container in water will have a net weight of the container less the metal volume’s weight of water.”
agree
“The mass of the container underwater includes that of the water inside.”
??
@David
I think I see what you are saying. The mass of the container in the water will be the mass of the vessel itself plus the water inside. The downward force in water due to gravity will be that mass x “g”. The buoyant force, offsetting gravity, will be the weight of the volume of water displaced by the container.
@Dennis. Yes I think that is it, said another way. What I was emphasising is that its momentum at the botom is independent of its weight, being dependent t on its mass. It could weigh little but take some stopping.
Paul McReady, who won the Kremer prize for the first manpowered flight had a couple of things I remember from a lecture by him. One was that they found in trials that the aircraft was accelerating slower than calculated. It proved that they had not allowed for the mass of the trapped air in the aircraft, particularly its wing. The aircraft build was so light that this mass made the difference. (The other thing he came up with was a simple equation which demonstrated that lightness was the dominant feature. Some had been trying two pedallers. Wrong. One and lightweight at that was the key).
@Dennis. For”weight” above, again I mean net weight in water.
Here’s a “93 South” case I am working tonite. Similar to DrB’s but with different story line.
Ending waypoint intentionally entered is 3193S, to get beyond the northern Broken Ridge summit boundary and into deep water. MUTMI is 93 South, with no time for loiter, it’s IGOGU to MUTMI to 3193S. Speed is reduced to M0.8 at some point before MUTMI, once it seems nobody is following. Arc7 end point is 34.5S and 93.3.
Presumably by picking Waypoint 3193S the fuel supply to that point could be checked.
@David
Yes. We are on exactly the same page. The force pushing the object down is the net force of gravity acting on the total mass (including water) minus the buoyant force equivalent to the mass of water displaced by the entire structure. The energy of the descending object is, however, 1/2 * m * v^2, where m is the total mass including water and v is the sink rate.
So, Olekdandr is correct. The energy imparted to the sea bottom is calculated by considering sink rate and total mass including the water inside.
Like Victor, I struggle to believe 9M-MRO hitting the bottom was responsible for the detected event, but it certainly could be.
@Dennis,
Re: “Consider a metal bucket weighing 5 kg that holds 20 kg of water. If you fill it with water and place it in a pond it will sink like a metal bucket weighing 5 kg. You cannot count the water inside the bucket. It is neutral relative to the sinking weight.”
I think you already start getting it, but nevertheless I will comment. No, the bucket will sink as an object of 25 kg. Suppose its volume is 21L, which includes 20L of the volume inside of it and 1L volume of its walls. The average bulk density would be 25/21 kg/L > 1. The terminal velocity of this object depends on the dimensionless term (25/21 – 21/21) = (25/21-1) = (25-20-1)/21 = (5-1)/21 – chose whatever form you like.
That means that the terminal velocity does not depend on the mass of water trapped inside – that is probably what you intuitively tried to say.
Now suppose this bucket with water hits bottom of the pond at 1 m/s. Its kinetic energy at the moment of impact is 0.5*25*1^2 kg*m^2/s^2, but not 0.5*5*1^2.
———–
Re: “Like Victor, I struggle to believe 9M-MRO hitting the bottom was responsible for the detected event.”
Take a coin and drop it into water from 1 m height. Drop the same coin into a metal or glass can from 5 cm height. Which sound is louder? You may fill this can with water. You would barely be able to distinguish the sound of a splash as the following bottom impact sound would be significantly louder.
@David,
Re: “More a rumble, unless the bottom is soft as with the lost towfish depressor weight”.
The ‘softness’ of the seabed is indeed a factor. Before Fugro’s survey it was believed that the seabed is covered by 10m layer of soft mud in the SIO. Fugro’s images have shown that it is not the case.
@for any interested in the right flaperon separation sequence.
https://www.dropbox.com/s/i4bygiic796opn6/Right%20flaperon%20separation.docx?dl=0
@followers of the Boeing final BFO substantiation.
Here is a reponse to my supplementary question to the ATSB about how it was that Boeing’s simulations replicated descent rate differences in 8 seconds, substantiating the final BFOs, where no level D simulations did, at least to my knowledge.
“…As you requested, I have gone back to my colleagues. They advised that any discrepancies between the simulations you have seen and those which the MH370 Working Group used may be the result of access to different simulators. The Working Group’s simulations were performed in the Boeing Engineering Simulator which has a significant fidelity to the actual systems on the aircraft, and which was therefore considered more accurate than many other available simulators. The required increase in rate of descent (consistent with the BFO analysis) was recorded in several simulations with different configurations of the aircraft. Given the commercial origins of the information, and the confidential nature, we do not have any additional details of those simulations for public release.”
@Oleksandr. Not 10m of soft mud, no but the depressor weight buried its nose a couple of feet or more into soft stuff, looking at it on the bottom compared to being recovered.
It might have dragged the towfish behind it but its underwater weight and profile might have led to a descent about that of the engines and main undercarriage if any separated. Enough for at least some cushioning and sound deadening?
@DrB: In your post of April 1, 2017 at 6:27pm you first describe your ECON model, which represents the Boeing AERO Figure 1 for CI from 0 to 350 100lb/hr (MRC to 1.025*MRC).
Then you write: “I generated a general B777-200ER/Trent892 Fuel Flow equation by empirically fitting the Boeing FCOM FF tables for LRC and Holding.
(…)
This equation is needed to model Fuel Flow at arbitrary CAS.”
I wonder whether you have compared the latter FF equation to your ECON model and what the results were.
@DennisW said, “The energy imparted to the sea bottom is calculated by considering sink rate and total mass including the water inside.”
In fluid mechanics, it is well-known that the acceleration (and deceleration) of an object immersed in a fluid is changed due to the “added mass” of the entrained fluid surrounding the object. (I first ran into this effect studying the bubble growth dynamics of boiling liquids.) When an object impacts the seabed, the added mass would also impart energy to the seabed.
@David: Thank you for the update from the ATSB. The fact that Boeing was able to not only replicate descent rates, but also the rate of change of descent rate (i.e., the vertical acceleration) with no pilot input gives further credence to our interpretation of the final BFO values. It is nonetheless unfortunate that we do not have access to the specific configuration and conditions that led to these values.
@Victor Iannello said: “The fact that Boeing was able to not only replicate descent rates, but also the rate of change of descent rate (i.e., the vertical acceleration) with no pilot input gives further credence to our interpretation of the final BFO values.”
The published flight paths from the simulations performed by the manufacturer are aligned at a point consistent with when the final BTO transmission may have occurred. The shape of those flight paths suggests that much more than 8 seconds elapsed between that point and the time that the rate of descent in the simulation matched the final BFO value.
A week ago I have asked the ATSB to provide those time delays. So far there has been no reply.
@Victor,
@Dennis,
Re “When an object impacts the seabed, the added mass would also impart energy to the seabed”
Exactly. That is why earlier I corrected myself: “entrapped and entrained”.
Under ‘Entrapped’ I meant water, which fills cavities in debris. Even if air cannot escape from these cavities, the ambient water pressure would compress it by ~400 times, and 399/400 volume would still be filled with water.
Under ‘Entrained’ I meant what Victor explained above. It is more difficult to quantify the effect of added mass.
But what is clear is that the seabed impact energy can be of an order higher than the kinetic energy corresponding to the dry mass of the plane.
@Oleksander
What is the bottom line as far as MH370 – any chance we have some *possible* crash location data?
David: Thank you for sharing the latest ATSB confirmation that the Boeing engineering simulator was able to reproduce the high acceleration observed for 9M-MRO at 00:19 (0.68 G recorded for 9M-MRO). That result is consistent with previous ATSB emails I received, my independent analysis (and Victor’s) going back to the summer of 2014 and Level D simulations Paul M. and I conducted in the fall of 2014. But none of this should have ever been a surprise or in doubt given the historical crash data provided in June 2014 by ATSB. Appendix C and D in the June 26, 21014 Report list the recorded descent rates for many crash cases. Although the document does not contain explicit descent acceleration values, the velocities are clearly indicative of a very rapid descent and high energy impact.
@Oleksandr: You posted your fuel flow model on April 2, 2017 at 9:47 am.
I started looking at the values for CD and am wondering whether I understand your model correctly.
For example, I get for CL=1 AoA=0.1291 rad (7.4°) CD=45.3.
A similar airplane has CD=0.053 for CL=1.
The formula for FF uses CD times dynamic pressure without reference wing area. Is that correct?
@ALSM/David
Yes, good info but depressing in a way.
We have an incredible group of really smart people here, and we arrive at solid answers. What depresses me is that there are really smart people on the ATSB side of the fence as well. They have more and better info than we do, and access to manufacturer’s input. What do we really think our chances of generating a eureka moment are? Pretty low in my opinion.
Anyway, just whining. It is not even 5PM in California yet.
@ Those doing fuel modelling.
Have you guys seen this ?
http://www.pprune.org/archive/index.php/t-334216.html
@Don: thanks. So re: Simeulue, that’s 1 hectare down, 230,999 to go.
@all: I am learning that ground-based radars seem to be only one piece of the radar coverage equation; once we’re done with those, we’ll need to move on to known or suspected locations of SHIPBORNE and AIRBORNE military radars.
I remain hopeful for a shortcut – either someone reading this plugs me in to a more comprehensive data source, or we get officials to talk. I’d guess that, after a certain number of years, more details might be forthcoming from defense departments regarding actual coverage on the night in question. Eventually, force status as of a fixed date becomes stale intel, and may soon be pryable out of the key players (India, primarily, it seems, judging from maps which plot military base locations and current path proposals on the same map).
Oleksandr: fill up a bathtub. Take a handful of sand. Tie it up in a sac that will survive a hard throw, but not impact with water. A thin tissue, perhaps. Throw it as hard as you can down onto the water in the tub. Record the sound of impact, and also record the sound of sand hitting the bottom.
I don’t present this example to start an argument over which analogy (coin vs sand) is supreme – I am not an engineer – but rather merely to point out that there are very different ways to frame the experiment, each of which paint very different pictures of relative sound energy.
I hereby retreat permanently from the discussion. (Not because I disrespect you or your argument; I just have other more compelling reasons to believe the Curtin Boom did not come from anywhere near Arc 7.)
@DennisW. “What do we really think our chances of generating a eureka moment are? Pretty low in my opinion”.
Yes, on this side right now the rationalist would say that, the optimist hanging on out of a mixture of persistence, interest, philanthropy, stimulation and you-never-knows.
About the bright people on the other side of the fence the impression I have is that the budget for further investigative work on drift, biological analysis and the ATSB initiatives has run dry.
That side now apparently is with Malaysia.
Then there are always the “unknown unknowns”. Hard to argue there is none of those.
@Ventus. Interesting link. But remember that this discussion is mainly talking about difference in fuel over a specified range (efficiency) not time (endurance). I sorely wish that we had a flight ops expert with extensive 772 experience and data with which to verify fuel assumptions that we have converged upon.
Has anyone who has tried a level 4 SIM with appropriate airframe/engines/gross weight taken note of fuel consumption?
On the subject of fuel modelling:
The FCOM and two recent fuel models at FL350/ISA and 240 mt are compared to the Boeing AERO Figure 1 in this chart.
Thanks, @Gysbreght. That is a useful comparison. Would provide even more insight if it could be expressed as fuel/time rather than distance/fuel.
@Paul Smithson:
Like this?
@DrB
Dr. Ulich, I found your comments at R. Thomson blog about Ocean Shield detections. I now want to have a go at source localization for those, they seem consistent with source at sea bottom. Do you by any chance have AIS data for Ocean Shield, and any idea on how the depth and distance from TPL to ship was varying during survey? Basic idea is that most of the survey (@3500m depth) was done too deep to fall into illumination zone due to refraction of sound. So detection start-detection stop points fall on spherical surface. More can be had from Doppler delay and amplitudes of pulses.
@G. No, I meant fuel flow on y axis expressed in kg/hr and M number on x axis; showing how the different models compare.
@Paul Smithson:
The point is that the models don’t model fuel flow as a function of speed, for speed as an independent parameter, as opposed to speeds defined by weight and altitude. I think the first graph shows that clearly enough.
Cheers.
Paul Smithson: As most know by now, Paul M and I conducted several simulations on Nov 2, 2014. Unfortunately, I did not record the fuel consumption rate for the case of both engines running normally. However, FWIIW, we did record the single engine consumption rate in 2 cases, following the first engine flameout. We set the fuel imbalance to 700 lbs and measured the time between 1st and second flameouts. In one case, we got 7754 lbs/hr and in the other case we got 7683 lbs/hr (1% less). From a separate analysis of fuel consumption based on data in the FI (ACARS), we estimated that the single engine consumption was 14% higher after the autothrottles increased following first engine flameout.
@Gysbreght,
“I started looking at the values for CD and am wondering whether I understand your model correctly.”
I think either you did not understand it correctly, or I did not copy/pasted it properly. To simplify I copied my scripts into Excel, hopefully correctly. Let me know if this works for you. I have used Matlab to fit FCOM tables, but I have not benchmarked this Excel against FCOM. Let me know if you find large discrepancies, or anything suspicious. Feel free if you want to improve it.
https://www.dropbox.com/s/naw3frrgd01z3rd/ff_model.zip?dl=0
Re: “The formula for FF uses CD times dynamic pressure without reference wing area. Is that correct?”
In the formulation I posted earlier CD = CD0 + … is already multiplied by respective area as I needed to know only the product. Generally, it is incorrect to assume that this ‘respective’ area is proportional to wings area. Wings reference area is explicitly included into the lift formulation.
@Victor: I have also included a paper showing the effect of compressibility on the drag coefficient. In my opinion it appears to be significant only at M>0.75.
@TBill,
“What is the bottom line as far as MH370 – any chance we have some *possible* crash location data?”
The bottom line is that if I were the one to recommend search area to ATSB, I would strongly recommend to scan a small area at the intersection of the 7th arc and the acoustic signal bearing. This area is consistent with everything known up to date: drift studies, barnacle temperatures, definition of the initial ATSB’s priority area, and at least two different flight path models. An important aspect is that this survey would not take more than 1% of Fugro’s budget (area-prorated).
@Brock,
“fill up a bathtub. Take a handful of sand. Tie it up in a sac that will survive a hard throw, but not impact with water. A thin tissue, perhaps. Throw it as hard as you can down onto the water in the tub. Record the sound of impact, and also record the sound of sand hitting the bottom.”
Let me suggest another experiment. Take a metal bucket filled with the same amount of send and do the same. I think your mistake is that your conclusions rely on the assumption that the surface impact generates a million of small pieces like sand grains. We don’t know if this assumption is correct or not.
Re: “I just have other more compelling reasons to believe the Curtin Boom did not come from anywhere near Arc 7”
What are these compelling reasons?
@Kirill,
No, I don’t have any Ocean Shield AIS data.
@Oleksander: Thank you for explaining your terminology. Aerodynamic coefficients are dimensionless. The quantity you denote as CD has the dimension of area, and would be more properly called “drag area”, as some authors do.
If you think that the curve I compared to the Boeing mileage curve does not represent your fuel flow model as you posted it here, then please provide the correct curve.
@Gysbreght,
I’ll take a look at the mileage curve shortly.
For now I can say that if you estimated the drag coefficient multiplied by the respective area (you call it “drag area” if I understood you correctly) of order 45.3 (your post April 3, 2017 at 11:07 am), then the curve you presented based on my FF model is wrong.
@Oleksandr:
The curve I presented is based on the formulation as you posted it.
Knowledgeable authors sometime use “drag area” for irregularly shaped objects. It is not commonly used for airplanes.
@Gysbreght,
That is why I posted xls-calculator today. If you got CD using my formulation of order 45, then something was wrong as it should normally be around 5 times smaller.
@Gysbreght,
@Victor,
Thank you both for your comments and questions. Your feedback is quite helpful. Here are some observations of my own regarding my ECON model and fuel flow equations.
1. Victor said: “The speed corresponding to a 1% fuel efficiency would be greater than M0.84 based on the curve, so it is probably limited to M0.84.”
The data in the curve in Figure 1 is not limited to Mach 0.840. It goes up to ~M0.86. To what “it” are you referring when you say “it is probably limited to Mach 0.84”? The Boeing LRC table goes to M0.841 at FL430, so Boeing is not always clipping LRC at Mach 0.840. Besides, higher CI’s than 180 will have ECON speeds above M0.840 at optimized altitude. It’s not as if there is a brick wall at M0.840 either for LRC or for ECON 180.
2. Boeing treats LRC differently than ECON 180. For instance, ECON 180 has slight headwind/tailwind corrections that LRC does not have. In addition, it may possible to fly LRC at lower altitudes than ECON 180, and this might lead to maximum operating speed clipping of LRC. Gysbreght will understand these effects far better than I do.
3. In response to Victor’s question, let me explain in words how I derived my ECON Model equations for Fuel Flow (FF) and Mach as functions of Cost Index (CI). I used the data points shown in the Boeing Aero article Figure 1 of fuel mileage versus Mach. LRC is shown as Mach 0.840 at 66.5 NM/MT and MRC is shown as 67.0 NM/MT at M0.826. Thus MRC (for which CI = 0) is 0.826/.840 = 0.9833 of the LRC speed. The MRC fuel mileage is 67.0/66.5 = 1.0075 times the LRC fuel mileage. Since the fuel mileage is simply the speed divided by the FF [ NM/MT = (NM/hr) / (MT/hr)], the MRC FF is the speed ratio divided by the fuel mileage ratio = 0.9833/1.0075 = 0.9760 times the LRC fuel flow. Now we have two points for the CI scaling factor equations. For CI = 180 (~LRC) the FF scalar is 1.000, and for CI = 0 (~MRC) it is 0.9760. For the Mach scalar, at CI = 180 it is 1.000 and at CI = 0 it is 0.9833. The next step is to determine how to interpolate between CI = 0 and CI = 180. Well, if I assume, as I did, that the CI only considers fuel cost and no other hourly costs, then the CI varies linearly with FF. Since we have a straight line going through two known points, the linear equation is now known and can be used to relate the relative FF for all values of CI. For each dotted point in Figure 1, I measured the Mach and the fuel mileage off the graph, and then I calculated the ratio of Mach/(fuel mileage), which is proportional to the FF. Next for each point I normalized the Mach to the LRC Mach (0.840 in this example) and the FF relative to the LRC FF. Now I have two lists: relative Mach and relative FF. I already know that the CI is linear with FF, so now I find the equation for relative FF (i.e., the straight line) that produces CI=0 at MRC (0.9760 relative FF) and CI = 180 at LRC (1.0000 relative FF). That gives me the first scalar equation for relative fuel flow as a function of CI. Now the second part is also easy because, for each point in the graph I now have a calculated value of CI (calculated in the reverse fashion using the linear equation of the relative FF for a given CI) and a relative Mach. I just fit a simple polynomial to that table and get the scalar equation for relative Mach as a function of CI. This equation is quadratic. Now I have two equations. The first one is the linear relationship of the ratio of FF to the LRC FF as a function of CI. The second equation is the quadratic relationship between the Mach relative to the LRC Mach as a function of CI.
4. The Boeing Aero Figure 1 is one curve for one combination of weight and altitude. At other conditions the shape of the curve will change slightly. We only have access to one curve, so I use it for all ECON operating conditions. It is an approximation, of course, but hopefully its shape probably does not change too much. I assume the FMC has the capability to, in effect, apply the same two equations I have derived but effectively with coefficients which vary slightly with altitude and weight. I suspect the FMC may do this mathematically with Hamiltonian matrices, which are always 2N X 2N and have certain symmetry properties. That could simplify the calculations.
5. I have a guess where the 66.5 NM/MT in Figure 1 comes from. If you take the LRC tables at FL350 and W = 240 MT, the FF is 3,645 kg/hr/engine and M = 0.840. In this case the 2-engine fuel mileage is the True Air Speed of 484.2 NM/hour (assuming ISAT) divided by (3645*2/1000) MT/hour = 66.42 NM/MT. That’s very close to the 66.5 shown in the graph, so maybe the flight conditions for this particular graph are close to FL350 and 240 MT. (N.B. I see after I wrote this that Gysbreght found this combination also.)
6. The Boeing Aero article says CI is the ratio of time cost in $/hr divided by fuel cost in cents/lb. So CI = X $/hr / Y cents/lb. Now the time cost (of only the fuel) = X $/hr = FF2 kg/hr * 2.20462 lb/kg * 100 cents/$ * Y cents/lb = 220.462*FF2*Y, where FF2 (for 2engines) = 2 *FF for 1 engine. Now CI = 220.462*FF2*Y / Y = (2.20462*FF2)*(100 lb/hr). Thus the CI (for the LRC case) has units of 100 lb/hr. The 100 comes from 100 cents/$. For Boeing FMC’s, the CI for ~LRC is thus the total (2-engine) fuel flow in units of 100 lb/hr. For the B777, the CI for ~LRC is 180, so the total fuel flow must be 180 * 100 = 18,000 lb/hr or 4,082 kg/hr/engine. The highest fuel flow in the LRC table is only 3762 kg/hr/. So the highest listed LRC fuel flow of 3762 kg/hr/engine is substantially less than the 4082 implied by the value of CI chosen as 180 for this aircraft. Could the 4082 kg/hr/engine be the fuel flow for maximum continuous thrust, or some other high FF limit? Boeing gives the approximate LRC-equivalent CI for their different aircraft models in the table on page 27. It looks to me like the LRC CI value is more or less dependent on the aircraft flying weight, with the B777 in between the 747 and the 757.
7. I suggest that perhaps the CI value used at LRC is a limiting maximum value of continuous fuel flow (in units of 100 lb/hr), and the CI value is always zero at MRC. Interpolation between MRC and LRC is done so that CI varies linearly with FF. For each aircraft/speed/weight combination, a curve similar to Figure 1 was used to compute the relative speed and FF as functions of CI.
8. The general FF equation I presented for fuel flow as a function of weight, flight level, and Mach was fit to LRC data from W = 160-240 MT, FL from 310-410, and Mach from 0.64-0.84. I also used HOLDING fuel flows from FL = 250-400, W = 160-240 MT, and Mach from 0.50-0.82. Thus that single equation is applicable over those ranges of input parameters. Outside those parameter ranges, particularly for very low altitudes, the current equation it is not accurate. I’ll go back and see if I can extend it to cover altitudes down to at least FL100. It is difficult to know what sorts of errors occur for intermediate speeds. That is one reason why I have only used very-low-order polynomial equations (quadratic only). Extremely high order polynomials (someone mentioned 15th??) can give extreme variations in regions where the fitted data are sparse. I think my quadratic interpolation is a good approach because it won’t go far afield. I would love to have more fuel flow data points at speeds other than LRC and HOLDING to compare with my predicted fuel flows and improve the accuracy (more on this below).
You can see the original fitting residuals here.
There are three plots shown in this file of Fuel Flow fitting error (%) versus Mach, weight, and Flight Level. The LRC points and the HOLDING points are shown as different colors. There are hints of small systematic errors at a level of 1-2%, but fitting a few higher-order terms does not make them go away. More data are needed to improve the accuracy, not more fitted terms.
9. @sk999 said: “Thanks for the fuel model. I coded it up and ran it on the RMP flight plan. You’re predictions (leaving out pda and temp corrections) average 1.2% higher than mine, which is in line with the fact that you derive a lower pda than I do.”
It’s nice to see a fairly close agreement. The single fuel flow equation fitting errors are ~0.9% RMS over its applicable range. My ECON Model matches the RMP Flight Brief to better than 1% for the level-flight portions.
10. @Gysbreght said: “What you are trying to achieve is impossible. For each weight and altitude you have only two speeds, LRC and Holding. From those two points on the speed curve you can’t possibly predict the fuel flow at speeds between LRC and Holding or beyond those speeds.”
Well, it is not impossible to approximate the interpolation (I am not trying to extrapolate). I know several facts. First, the curve passes through those two points. Second, it is continuous. Third, it is monotonic. A second order approximation won’t be perfect, but it will be a useful approximation. That’s what I did at the time, and I think it is better than doing nothing. There is perhaps a way to do somewhat better now. I will add the Boeing Figure 1 data to my list of FF points to be fitted. That should help the prediction with Mach between 0.76-0.86. I’ll also try adding the low-altitude HOLDING points to see if those can be fitted as well, and I’ll add a comparison of the ECON Model with the generalized equation.
11. With regard to considering other time costs besides fuel, it seems that this is done by choosing the value of CI to be flown; it is not contained in the derivation of the CI (which only considers fuel flow). Interestingly, the Boeing table lists 90-150 as typical CI values. MAS was using 52. That’s a significant difference, and perhaps it is related to a change in the relative magnitudes of the time costs of fuel and other expenses (such as aircraft maintenance, for example). Even if only the fuel cost changed, one would need to select a different CI to maximize profit. Note that the derivation of CI is independent of any assumed fuel cost. If fuel became more expensive, a lower CI should be used.
@DrB: ” I know several facts. First, the curve passes through those two points. Second, it is continuous. Third, it is monotonic.”
Fuel flow versus speed is not monotonic. It has a minimum at the holding speed, except where holding speed is limited by minimum maneuver speed. That is a property that may be useful.
@Gysbreght,
Yes, the fit can be constrained to make that FF minimum happen at the correct speed of MRC. I will see about incorporating that. What I originally should have said is that it is monotonic between MRC and LRC.
Holding is minimum fuel flow. MRC is maximum mileage. Better keep those apart.
@Oleksandr
““What is the bottom line as far as MH370 – any chance we have some *possible* crash location data?”
The bottom line is that if I were the one to recommend search area to ATSB, I would strongly recommend to scan a small area at the intersection of the 7th arc and the acoustic signal bearing. This area is consistent with everything known up to date: drift studies, barnacle temperatures, definition of the initial ATSB’s priority area, and at least two different flight path models. An important aspect is that this survey would not take more than 1% of Fugro’s budget (area-prorated).”
I like that answer. But you leave me hanging. What is that “x” marks the spot? What are the two flight path models? I think you’re probably talking about 27S and the Iannello/Godfrey McMurdo path as one of the paths.
@Gysbreght
Yes we are talking 3 speeds Holding (max time), MRC (max miles/gal), and LRC (max speed within 1% fuel use of MRC).
Can I get some actual numbers for example? So let’s say 35K feet and MH370 weight at IGOGU. So I think that’s about LRC approx. 0.84 MRC approx. 0.81
@TBill: Let’s assume weight at IGOGU would be about 207.5 mt then LRC at FL350 would be about M.83. The difference between MRC and LRC at that weight could be somewhat greater than at 240 mt so MRC=M.81 seems a reasonable guess.
@DrB: In your point 6. you ask: “Could the 4082 kg/hr/engine be the fuel flow for maximum continuous thrust, or some other high FF limit?”
That question results from a misunderstanding of the CI concept when you write:
“For the B777, the CI for ~LRC is 180, so the total fuel flow must be 180 * 100 = 18,000 lb/hr or 4,082 kg/hr/engine.”
That is not not correct. CI has the same dimension as fuel flow, but does not indicate a particular value of fuel flow. CI refers to the local slope of the fuel versus time line shown here. The point on that curve where the local slope is 18000 kg/hr (in absolute value) identifies the speed that minimizes total operating costs for a cost index of 180 (100lb/hr). The thin green line in the graph that is tangent to the blue fuel-time line indicates a slope of 18000 kg/hr.
CORRECTION: Please read 18000 lb/hr where I wrote 18000 kg/hr.
@Gysbreght
How about what is holding speed at the same conditions?
@all
Let’s say my intent is IGOGU to MEKAR but that would fly right over Great Nicobar Island. Would I fly over the Island, or jog 180 South at IGOGU and then go west?
@Gysbreght,
I don’t know how you got CD = 45.3, but the curve you posted seems to be correct.
The most likely reason is that I did not account for the impact of Mach on the drag coefficient. Another possible reason is that my target was to better fit weights 180-200 tonnes at lower altitudes and lower speeds. I will check whether accounting for Mach can help.
Do you have similar curves for weights 160, 180, 200 and 220 tonnes?
What about other altitudes and lower Mach?
@TBill: Holding speed is about M.76 at FL350 207.5 mt.
@Oleksandr: “Do you have similar curves for weights 160, 180, 200 and 220 tonnes?
What about other altitudes and lower Mach?”
I only did the curve for FL350 240 mt because the only Boeing data that treats Mach as an independent variable is the AERO Figure 1 for that condition. It’s up to you to produce similar curves for other weights and altitudes but other than fuel flow at holding speed you have nothing to compare it to.
@Gysbreght,
Never mind. The Fuel Flow is monotonic with speed. Only the fuel mileage is not.
@DrB: As you wish.
All interested in fuel modelling.
Has anyone tried requesting access to the european BADA tools? This might provide a useful independent check on fuel consumption estimates if the BADA database includes Boeing 772.
“The Base of Aircraft Data (BADA) is an Aircraft Performance Model (APM) developed and maintained by EUROCONTROL, with the active cooperation of aircraft manufacturers and operating airlines. The BADA APM is designed for simulation and prediction of aircraft trajectories for purposes of ATM research and operations. Aircraft performance parameters and trajectories can be calculated using information and data contained in BADA.” Around 100 aircraft types available.
I would appear that access can be granted for university-affiliated individuals working on aviation issues:-
“Access to BADA is given to Air Navigation Service Providers, research and development organisations, universities and commercial entities, to the extent necessary to enable them to work on Air Traffic Management related projects.”
Link is here
http://www.eurocontrol.int/services/bada
@DrB: “The Fuel Flow is monotonic with speed.”
That is interesting. So the tabulated holding speed is not the maximum endurance speed as stated in the associated FCOM text:
“Holding
Target EPR, indicated airspeed and fuel flow per engine information is
tabulated for holding with flaps up based on the FMC optimum holding
speed schedule. This is the higher of the maximum endurance speed and
the maneuvering speed for the selected flap setting. Flaps 1 is based on
VREF30+60 speed schedule. Small variations in airspeed will not
appreciably affect the overall endurance time. Enter the table with weight
and pressure altitude to read EPR, IAS and fuel flow per engine.”
What defines the tabulated holding speed?
@Gysbreght: As you know, we have been talking about fuel flow and efficiency for speeds between LRC and Holding speed. @DrB said he doesn’t extrapolate outside of those values of speed. In that range, the fuel flow monotonically increases with speed as DrB has said. Let’s not bicker about semantics. We are trying to share and advance our knowledge.
@Victor Iannello: “We are trying to share and advance our knowledge.”
Exactly. So am I. I’m not “bickering about semantics”. Either the author of the AERO article allowed himself some artistic freedam in drawing a chart for illustration purposes, or the FCOM text is incomplete. Perhaps the buffet boundary comes into it. If the tabulated holding speed is not the maximum endurance speed, that reduces its usefulness for interpolation between holding and LRC speeds.
BTW, I’ve always wondered why the FCOM holding speed schedule looks so strange in terms of lift coefficient CL.
@Gysbreght:
Forgive me if telling you something you already know, but at lower altitudes and weights the holding speed is limited by the flaps up manoeuvring speed rather than the maximum endurance speed, to ensure there is adequate manoeuvre capability to low speed buffet. The yellow shaded area in the following holding table shows the altitude/weight combinations that are limited by the flaps up manoeuvring speed:
https://www.dropbox.com/s/sn72nbpi7qqodtz/Holding%20Table.png?dl=0
Thank you, Andrew. Yes, in the graph of holding CL versus Mach, the points below the upper boundary line are limited by the flaps up manoeuvring speed.
Not to bicker about semantics, but the spelling of “maneuvering” in your table is kind of interesting.
Well I guess that depends on which version of the English language you prefer!
Well I guess that you would not be using a British or Canadian manual if you were working for Boeing.
Just for completeness, here is the lift coefficient CL for LRC. The points above the lower boundary line are limited by 325 kIAS.
@Gysbreght:
Who said I worked for Boeing? There are a lot more countries than just Britain and Canada that use ‘British’ English!
@Andrew: Just a thought that crossed my mind. Please excuse that remark.
On the subject of fuel modelling, more comparisons:
Fuel flow at Holding speed versus FL; Weight=200 mt
Fuel flow versus Mach; FL200; Weight=200 mt
Here’s a flight path that matches BTO fairly well, pending further work. Assumes PIC is trying to go down 93 East to get over the Broken Ridge summit.
In SkyVector it is as follws:
IGOGU BULVA MUTMI 3193S then accept discontinuity at 31S
In FS9, I set to clock to 1941 when the aircraft reaches Arc2 and adjust the speed from M.84 down to 270 KIAS. It’s not perfect but I have not added wind yet and possibly instead of 3193S waypoint, it could just be 180S setting of one sort or the other.
PS- On the above flight path:
Speed can be thought of as holding speed, because as late as 2141 at 14.5S there is still enough fuel to get over to Jakarta.
@TBill – is there enough fuel to make it to Exmouth or Learmonth ? Can’t remember which one has the military base….
@MH
MUTMI and nearby PIPOV are on the flight paths to Exmouth and Learmonth. Those waypoints are also just outside the Indonesian flight space. So there might be enough fuel with an early decision at MUTMI to divert. I do not really have an accurate fuel model, but I look at distances.
@Gysbreght: I recently resurrected my old fuel model, which was based on physical models with empirical constants. As such, the shapes of the curves are always realistic, although at low Mach and low altitudes, the match to the Holding table data was not as good.
Here is a comparison of all the fuel flow models at FL200 and 200MT. I think it does a pretty good job of approximating the data. The predicted lift-to-drag ratio is also pretty good.
I’ll do some other comparisons if there is interest.
@Gysbreght,
On the subject of fuel modeling.
I used PI.21.4 tables in the following way. Take pressure altitude 10,000ft column, for example, the first 2 entries.
Air distance travelled from 0:39 to 1:14 is 400-200 = 200 nm;
Time taken to travel these 200 nm is 1:14-0:39 = 35 minutes;
Average weight on this interval (200-3.6)-0.5*(7.6-3.6) = 194.4t;
Average air speed on this interval 200*1852/(35*60) m/s = 176.38 m/s.
At TAS = 176.38 m/s, weight = 194.4 tonnes, air temperature = 268.35K,
air density = 0.9047 kg/m^3, my calculator gives:
FF, Calculator (v1.0) = 6979.8 kg/hr
FF, FCOM = 4,000/35*60 = 6857.1 kg/hr
These numbers are consistent with each other.
Am I misunderstanding PI.21.4 tables? What is holding speed in your plot, so that your red curve is significantly lower (5,500 kg/hr at FL100)?
@all
Big “if” but “if” holding speed was adhered to during the flight to SIO, one implication might be the pilot and PAX were still alive, assuming possible diversion to Cocos or Jakarta (or Learmonth?) was a possible objective.
DrB is assuming a little different scenario (ghost flight after an attempt at setting holding speed), but another way to look at it is similar to Victor’s loiter, except the loiter is happening during the flight South.
@Oleksandr: “What is holding speed in your plot, so that your red curve is significantly lower (5,500 kg/hr at FL100)?”
Holding speed and fuel flow (less racetrack addition) is per FCOM 21.7 (all versions).
@Victor Iannello: “I think it does a pretty good job of approximating the data. The predicted lift-to-drag ratio is also pretty good.”
Yes, pretty good job. Congratulations!
If you increase the ratio between zero-lift drag to lift-dependent drag the minimum drag speed reduces.
I used cD = 0.01485 + 0.03382*cL^2, which gives minimum drag for cL=0,663, just above the FCOM value at cL=0.63.
Apparently you assumed constant TSFC (thrust-specific fuel consumption). I would do that also when I don’t have the actual engine characteristics.
Of course the lift-to-drag ratio changes for higher Mach numbers. Did you attempt to model the Mach drag rise?
@Gysbreght,
@Victor,
It looks like “Long Range Cruise Enroute Fuel and Time” (PI.21.4) suggests notably higher FF than the racetrack FF (PI.21.7). Am I missing something?
I differentiated PI.21.4 to derive average fuel flows over each time interval, and corresponding average weights and speeds, as I described in example above. I have not used PI.21.7.
@Gysbreght: TSFC is not exactly constant in my model. There is a correction factor equal to the total temperature ratio raised to an exponent. While I thought the exponent would be close to 0.5, in fact the best fit was with an exponent of 0.127. On this basis, I question whether the 3% per 10K temperature correction appropriate for GE engines is also appropriate for RR engines. It might be that the 3-spool engine can be better optimized over the range of conditions. I began to study this when I developed the model but I stopped when I could not get to 1% accuracy over a large range of weights, altitudes, and speeds. But seeing how crude some of the other models are led me to resurrect the model.
I have investigated a better engine model that separates out gross thrust and ram drag. However, I could not obtain a better fit than the simpler model.
Somebody long ago provided me with representative curves for a B777-200 for Cd v M at 3 different Cl (0.3, 0.4, and 0.5). I fit these curves and used them in the model. (At a given M, Cd is quadratic in Cl.) I also include a temperature correction for Reynolds number. Thrust is therefore directly calculated.
Here is a comparison of fuel flows at holding speed at various altitudes for the various models. Again, my model does a good job matching the tabular data in the FCOM across a broad range of conditions. Between FL250 and FL350, the match is very good.
@Victor,
What about your FF model against “Long Range Cruise Enroute Fuel and Time” table, and Gysbreghts’ CI curve?
@Oleksandr: “It looks like “Long Range Cruise Enroute Fuel and Time” (PI.21.4) suggests notably higher FF than the racetrack FF (PI.21.7). Am I missing something? “
Yes, a fuel model that accurately reproduces fuel flow at LRC speed does not necessarily produce correct fuel flows at speeds other than LRC speed.
Here is a fuel efficiency plot at FL350. The model produces a very flat curve between Holding (M0.750) and LRC (M0.825) speeds, which is consistent with the FCOM data. The model predicts the MRC speed is M0.798. The LRC speed from the FCOM is 3.4% higher than the calculated MRC speed. (I suspect other models that predict less than 1% difference are not correct.)
@Victor Iannello: Out of strictly academic curiosity, do your “curves for a B777-200 for Cd v M at 3 different Cl (0.3, 0.4, and 0.5)” go all the way to M.90 ?
@Victor Iannello: “The LRC speed from the FCOM is 3.4% higher than the calculated MRC speed. (I suspect other models that predict less than 1% difference are not correct.)”
Did you perhaps also determine the difference between MRC and LRC speeds at FL350 and 240 MT?
@Gysbreght,
True.
————–
@Victor,
Thanks, your model looks good. For a fair comparison with Gysbreght’s plot, could you post a curve for 240 tonnes weight?
@Oleksandr: “Gysbreght’s plot” is actually a Boeing plot published in the Boeing AERO magazine. But I agree with you, it would be nice to have VI’s curve for 240 MT to compare with that Boeing plot.
@G and @O: I’ll produce some plots tomorrow when I have time. But can we really be sure the Boeing plot is for a B777-200ER at 240 MT and FL350?
Question:
As I understand, the 777-200ER has the same airframe and wing as the 777-200. Difference being increase in MTOW (and therefore [heavier] engines capable of higher thrust for take off and climb. If this is the case should we not expect the same form drag and lift for any particular pressure alt/TAS/gross weight – and thus thrust required in cruise? And if that is correct, then any difference between the two variants is down to the engine efficiency (FF) to generate the required thrust?
The reason I ask is that the fuel flow figures that I have seen for 777-200 in a university simulator appear to be >10% lower (identical conditions – pressure altitude, ISA delta, TAS, gross weight) than those of the reverse-engineered fuel models under discussion here. The difference is still >8% even after considering 9M-MRO’s presumed combined PDA of 1.5%.
This brings me to my second question. If various analysts have derived their models directly or indirectly rom the same curves and tables we would expect them to be in broad agreement. Comparing them against one another does not amount to a validation. Comparison against the flight brief fuel plan in the RMP checks models against an independent estimate (and alignment suggests that the models and MY’s flight plan fuel estimates are in broad agreement). However, I can’t help thinking that we should really be validating fuel models against various external benchmarks, including:
a) simulators that are believed to offer high fidelity to actual aircraft performance
b) BADA
c) Piano-X
d) Aircraft operations guru’s 772ER estimates (to the extent that even “spot estimates” might be obtained)
Does nobody here have the access to obtain one or more of those??
@Victor Iannello: “But can we really be sure the Boeing plot is for a B777-200ER at 240 MT and FL350?”
Asking that question is answering it. The article doesn’t identify aircraft model, engine and flight condition. I’ve always used words like “probably” and “possibly” when referring to it as a B777 plot. In the context of the article’s discussion of Cost Index, only the upper range of speeds (above MRC) is relevant.
Below MRC the curve could be accurate, but does not need to be. It would be interesting to find the speed for maximum L/D at FL350; 240 MT, based on your curves of CD=f(CL, M).
Here are the curves I used to determine Cd as a function of M and Cl for a B777-200. The curves were found by @Kenyon and shared with me. Notice that Cd has a Mach number dependency even at M<0.6, and the dependency of Cd over the range of M is not monotonic.
Upon reviewing my fuel model from two years ago, I see a mistake I made in fitting the drag curve. Recognizing the mistake and re-fitting the curves might allow me to improve the accuracy of the results even further.
@Paul Smithson
Paper linked below has some comparisons relative to the BADA and ICAO data. Does not appear to be all that accurate.
http://www.mit.edu/~hamsa/pubs/ChatiBalakrishnanICAS2016.pdf
Good find, Dennis. I’ll write to the authors and see if they can offer some “spot estimates” for purpose of comparison with our converging opinion here.
FWIW, I found a two-year old spreadsheet that I had created, which had fuel economies that are much higher than those in the curve in AERO magazine. I believe my data source was the FCOM although I had one entry called “Gysbreght’s Fuel Economy.” Both of these showed an economy of around 80NM/1000Kg fuel at FL370 and 472KTS ground speed (no wind). These are all at 0% PDA and no penalty for the higher than standard temperature.
As for the “Enroute Fuel Range from a Check Point” Tables in the FCOM, the values show better efficiency because they no longer need to include the large amounts used during the initial climb.
I forgot to include that the 80NM/1000 kg is at a GW of 190 Tonnes, which, BTW, is close to the average weight of MH370 over the last 5 hours of its flight.
@Victor Iannello:
Thank you for your curves of CD = f(CL,M). Using those curves I found D/Wmin=.0496 at M.78; CL=0.542.
For the graph I extrapolated the curves a bit for CL>0.50.
@MH
Enter the following into SkyVector
MUTMI 3393S MUTMI YPLM
Its shows 1726 nM from MUTMI to 3393S (a little ways inside Arc6) and 1637 nM from MUTMI to Learmonth. So it looks to me that Learmonth is borderline reachable from MUTMI, pending a more accurate fuel model assessment.
It also assumes MH370 had a FMT at about 1840 to get to MUTMI relatively promptly without much loiter.
@TBill – thank you for the info!
@Paul Smithson:
“As I understand, the 777-200ER has the same airframe and wing as the 777-200. Difference being increase in MTOW (and therefore [heavier] engines capable of higher thrust for take off and climb. If this is the case should we not expect the same form drag and lift for any particular pressure alt/TAS/gross weight – and thus thrust required in cruise? And if that is correct, then any difference between the two variants is down to the engine efficiency (FF) to generate the required thrust?”
The engines on the -200 and -200ER are essentially the same, except that the -892 engine used on the -200ER is rated to operate at a higher take-off/climb thrust to satisfy the increased thrust requirements of that aircraft’s higher maximum take-off weight. Given the drag characteristics of the two aircraft variants are the same, the cruise FF should be the same for a given weight & altitude.
@Victor Iannello:
Professor Obert’s B777 data could be used with the FCOM performance data to obtain engine TSFC. A map of TSFC*Theta^X = f(Thrust/Delta, M) would look somewhat like
this.
Delta = atmospheric pressure ratio
Theta = atmospheric temperature ratio
X = theta exponent
@Victor Iannello: CORRECTION: Ignore previous post
Professor Obert’s B777 data could be used with the FCOM performance data to obtain engine TSFC. A map of TSFC/Theta^X = f(Thrust/Delta, M) would look somewhat like
this.
Delta = atmospheric pressure ratio
Theta = atmospheric temperature ratio
X = theta exponent
@Victor Iannello:
On further reflection (while starting along that road), I don’t think you can get a TSFC map that way.
All you can get is two lines running across the Mach lines, one line for Holding speed and another line for LRC.
I have digitized the Cd(M) data from Obert (available as three curves for Cl=0.3,0.4,0.5) and now have a very accurate method of determining Cd as a function of M and Cl, assuming a quadratic dependency of Cd on Cl at a given Mach number. From this relationship, I created the drag polar curve for a B777-200, which I believe is not generally available to the public.
The curves show a strong dependency of drag on Mach number, as expected from the underlying curves presented by Obert. This dependency increases at higher values of lift, as shown by the spreading of the curves. At low Mach numbers, the maximum (L/D) is 20.96, as shown by the tangent dashed line. At M=0.83, the maximum (L/D) is reduced to 19.76, as shown by the tangent dotted line.
@Victor:
“I have digitized the Cd(M) data from Obert (available as three curves for Cl=0.3,0.4,0.5) and now have a very accurate method of determining Cd as a function of M and Cl, assuming a quadratic dependency of Cd on Cl at a given Mach number.”
Thanks for the curves CD(CL,M). I was thinking of the method you proposed, however I am not sure if it is a correct approach. If you had a chance to take a look at “compressibledrag.pdf”, then the dependency of Cd on Cl does not seem to be quadratic at M>0.75.
——-
@Gysbreght, @Victor:
SFC = 0.557 lb/hr/lb at FL350, M=0.83, Thrust = 13000 lb, RR Trent 892.
Just one data point useful to verify or calibrate a fuel flow model.
@Oleksandr: At each M, we have Cd at Cl=0.3, 0.4, and 0.5. With the data we have, a second-order fit is the best we can do.
In fact, I have used this drag model with a simplified turbine engine model to produce the flow rate data with great success. I can now re-produce all the LRC and Holding data available from Boeing with an RMS error of only 1.13%. That includes the data from LRC speed at 43,000 ft all the way down to Holding speed at 1500 ft.
I’ll document and share the model in the near future.
@Victor,
A quadratic dependency is the best only if we don’t have any other information or a theory.
Could you also include comparison with “Enroute Fuel Range” table in your last plot? I see that your FF range is limited to ~4,800 kg/hr, while this table includes significantly higher fuel flow rates.
@Victor,
Just wondering, how your Cd(Cl,M) curve looks like for Cl=0?
It seems your curves Cl = 0.3, 0.4, 0.5 quite closely match those from “compressibledrag.pdf” for Cl = 0.2, 0.3, 0.4 respectively.
@Oleksandr said, “SFC = 0.557 lb/hr/lb at FL350, M=0.83, Thrust = 13000 lb, RR Trent 892. Just one data point useful to verify or calibrate a fuel flow model.”
If a model predicts the correct flow rate and a reasonable (L/D) ratio, then the predicted TSFC is also reasonable. For my model, the RMS error in fuel flow is about 1.13%, and even better for typical values of airplane weight. The predicted (L/D) is around 20 for typical cruise conditions. That implies the calculated TSFC is in the acceptable range. My model is semi-empirical with underlying physical models, which is why I suspect it does well over a broad range of conditions.
“A quadratic dependency is the best only if we don’t have any other information or a theory.”
I don’t know of a better relationship or theory that is based on actual data from a B777-200.
“Could you also include comparison with “Enroute Fuel Range” table in your last plot?”
I am not certain of exactly how the enroute fuel range is calculated, and so I have not and do not plan to make a comparison. I see a lot more value in matching the fuel flow data, where a comparison can be made at a particular altitude, weight, and speed.
@Oleksandr said, “I see that your FF range is limited to ~4,800 kg/hr, while this table includes significantly higher fuel flow rates.”
Please note that this is the flow per engine. The maximum flow per engine in the LRC table is 4746 kg/hr, corresponding to 300 MT at FL330 at M0.838.
@Victor,
Re “I am not certain of exactly how the enroute fuel range is calculated, and so I have not and do not plan to make a comparison. I see a lot more value in matching the fuel flow data, where a comparison can be made at a particular altitude, weight, and speed.”
What is a difference how it is exactly calculated? You have the average speeds and weights over 30-minute intervals or so, at respective altitudes. As a matter of fact, having a model, you can make even more accurate estimates of consumed fuel to compare it with FCOM. Anyway, it is up to you what set of data you want to use for calibration and what set for validation.
@Victor,
Thanks for the additional plot. That is what I expected.
Do you find it realistic that Cd for Cl=0 is higher than for Cl=0.3,0.4, and 0.5 at, say, M=0.85? Also that Cd for Cl=0 is comparable to Cd for Cl = 0.30 at M=0.65?
I posted the first version of my xls-calculator together with some references on April 4, 2017 at 7:52 am; one of them “compressibledrag.pdf”. I think Cl=0 should correspond to the minimum drag to make model physically meaningful.
@Oleksandr: I don’t believe the drag coefficient plot for Cl=0 is physically realistic. The extrapolation is too far outside of the range of Cl values that I used for the quadratic fit. I have removed the graph so that others are not confused.
Here is the plot of drag coefficient versus Mach number for various Cl. The Cd curves were derived using a quadratic fit of the curves for Cl=0.3, 0.4, and 0.5. I believe the curves are accurate for 0.3<=Cl<=0.55 and for M<=0.87.
A plot of TSFC derived from the FCOM and Obert’s cD=f(cL,M) looks like this.
The derived TSFC is almost constant over most of the thrust range (total 2-engine thrust). Perhaps Obert’s curves have been derived from FCOM data assuming constant TSFC?
The data for holding speeds are even stranger.
@Gysbreght,
If I read your plot correctly, TSFC is roughly 20% higher than it is supposed to be at cruise altitude and speed.
———-
@Victor,
It can be expected that the interpolation in the range 0.3<=Cl<=0.50 is reasonable, but I am not so sure about extrapolation to above 0.50 or below 0.30. Also, now I am not sure whether these curves really correspond to Cl = 0.3, 0.4 and 0.5 or 0.2, 0.3 and 0.4 respectively.
@all
Speaking of fuel consumption analysis. Does it matter? Can it help to refine the terminus?
The DSTG assumption 4 from page 60 of their book below:
begin cut-paste//
4. Infinite fuel: the fuel constraints on the aircraft can be applied to the pdf after-wards. In the simplest case, maximum reachable ranges could be used to censor impossible trajectories. However, analysis of candidate trajectories has indicated that the majority are feasible. Broad information about the fuel consumption rate of the aircraft has been used to inform the range of allowable Mach numbers.
end cut-paste//
I really don’t have a strong opinion. The DSTG does not use fuel consumption in their pdf algorithm. Certainly they had the benefit of ACARS data from 20 previous flights to model the fuel consumption of the aircraft very accurately. They chose not to do so. Why?
@Oleksandr: For the range of speeds, altitudes, and weights in the LRC and Holding tables, Cl is never less than 0.34. That’s why I think the extrapolated value to Cl=0 isn’t helpful.
@DennisW: It is not trivial to model fuel flow to the level of accuracy required to discriminate between possible and impossible paths. The DSTG essentially chose to ignore constraints imposed by fuel load except to set limits on Mach number. The capability to model fuel flow is resident at Boeing, not the DSTG, and my guess is that capability is carefully protected for competitive reasons.
It is still unknown whether or not we can converge on one or more fuel models with sufficient accuracy that we can eliminate paths. @DrB started down this path, although with imperfect knowledge about PDA, CI, and temperature relationships. I think our group’s collective knowledge about these matters is increasing.
@VictorI
I am surprised the SSWG did not attempt accurate fuel modeling. Seems like an important constraint. Not sure at the end of the day how much it would contribute to terminal location area reduction.
@DennisW: My estimation is it would have eliminated the southernmost parts of the search area.
@Victor,
Re: “For the range of speeds, altitudes, and weights in the LRC and Holding tables, Cl is never less than 0.34. That’s why I think the extrapolated value to Cl=0 isn’t helpful.”
The ultimate goal of a fuel model is to provide fuel flow rates at various conditions. Many records in the ‘Holding’ table correspond to the speed of around 200 KIAS, which is approximately 1.6 times lower than VMO. Hence Cl~0.15 would also be of interest. If you know that your drag model is good at Cl = 0.3, but it also gives something unrealistic at Cl=0, can you still use it as a part of the FF model at Cl = 0.15?
———-
@Dennis,
Re: “Speaking of fuel consumption analysis. Does it matter? Can it help to refine the terminus?”
Yes. A recent example from my experience. I obtained a solution terminating at 25S. The altitude after descent predicted by my model was 10,000ft, speed was corresponding to 310 KIAS. Nice numbers. All the turns had logical explanations. But I ran into a problem: insufficient fuel.
@Oleksandr: To calculate Cl, I use a reference wing area of 4630 ft2. Observing all the conditions in Boeing’s LRC and Holding tables, I calculate a minimum Cl of 0.34 at the LRC speed of M0.636 at FL250 for 160 MT weight. And at low speed, Cl goes up, not down, as the angle of attack increases to compensate for the lower dynamic pressure. I don’t recommend using my model at Cl=0.15, nor do I think this is a physically realistic condition for MH370.
Exactly what speed, weight, and altitude do you believe would produce Cl=0.15?
@Oleksandr: At Vmo=330 KIAS at sea level and at a weight of 174 MT, which is the ZFW, the lift coefficient is Cl=0.224. I don’t see how you can achieve a lower Cl without an overspeed condition.
@Victor,
“Exactly what speed, weight, and altitude do you believe would produce Cl=0.15?”
I have not estimated the exact minimum, but what about, for example:
Speed = 330 KIAS;
Altitude = 10,000 ft;
Weight = 160 tonnes?
If I am not mistaken Cl = 0.21 for these conditions.
@Victor,
Just found your comment after I responded your earlier question.
What is a point to use the whole LRC and Holding tables for the calibration, if you want to restrict application of your FF model to the range of weights from 174 to 210 tonnes? You could possibly achieve a better RMS.
Also, in this case, the comparison with Gysbreght’s CI curve (at 240 tonnes) does not make sense.
Finally, would your model be applicable for Cl = 0.224 as long as you already admitted it is possible?
@Oleksandr: I would achieve a better RMS error if I restricted my model to the weight range of 174 to 210 MT. I don’t think the constants would change much, though. Already, I am down to 1.13% RMS error across the LRC and holding tables. And right now, my model predicts the fuel efficiency at 240 MT and FL350 across the range of speeds quite well.
Yes, it is possible to safely fly a B777-200 at conditions for which Cl=0.224 (but not the Cl=0.15 that you proposed). I would not trust my drag model in this range. However, flying in this conditions would consume fuel at a much higher rate than we know is possible based on MH370’s fuel load and endurance.
The main purpose of my fuel study was to determine the fuel flow at speeds between the LRC and holding speeds. It is unlikely that MH370 flew with two engines for an extended time outside of this speed range.
@Victor,
Re: “Yes, it is possible to safely fly a B777-200 at conditions for which Cl=0.224 (but not the Cl=0.15 that you proposed).”
Cl=0.15 was a very rough approximate estimation derived from your Cl=0.34. And actually it turned out to be a very good estimate of the lower limit of Cl range in general, so I am puzzled by your resistance to accept it.
You wrote “To calculate Cl, I use a reference wing area of 4630 ft2. Observing all the conditions in Boeing’s LRC and Holding tables, I calculate a minimum Cl of 0.34 at the LRC speed of M0.636 at FL250 for 160 MT weight.” Then you asked “Exactly what speed, weight, and altitude do you believe would produce Cl=0.15?”. Bearing in mind you mentioned 160<174 tonnes, I assumed you were discussing a B777 in general, so I gave you an example. I can go further down assuming the altitude of 10,000 ft, weight of 140 tones, and overspeed 350 KIAS (if my understanding of FCOM that a pilot can go to 25KIAS above VMO is correct). This yields Cl = 0.165, which is a pretty close to the approximate figure I suggested earlier.
In my opinion, it appears that Cl = 0.16 is physically possible to fly a B777 aircraft, but Cl=0.21 is a more realistic lower limit for the specific case of MH370. Agree? A curious thing is that Cl = 0.225 = (0.3+0.15)/2 – it seems we are converging.
@Victor. Chipping in, for what it’s worth, from Definition of Underwater Search Areas 3rd December, 2015, p14, “The simulation (from FL330) resulted in the aircraft gliding for a total distance of approximately 125 NM from the point of the second engine flame-out”. That yields a max L/D of 23. The distance is consistent with the FCOM which at one place anticipates a 119 nm glide from 33,000ft at .84/310/250KIAS.
The 23 really should be less than your 20.96 L/D max, engines running, that is with engine inlet drag subtracted from gross thrust. The simulated glide L/D comparison would be even higher than the 23 without engine drag. Offsetting this some perhaps, Reynolds number in descent should decrease CD0, RN increasing by about 45% by sea level, same IAS.
I note Wikipedia lists the A380 L/D at 20 in the cruise, the 747, 17.7, so consistent with your 19.76 at M=.83.
Whatever, your model matches the fuel consumption expected within the operating range of interest.
I may be going over old ground here but as to what is expected, in the FCOM Performance Dispatch section I find mention of “Increase fuel required by 0.8% per 10˚C above ISA” but no mention of PDA. With other small drag variables like antenna configurations, trim, paint finish and cleanliness, ram air inlet and outflow valve openings it may be that in their estimates they add an increment for such customer variables also?
@David: “it may be that in their estimates they add an increment …”
Who are “they” ?
@Gysbreght. Boeing
@David: With the scant performance data we have, it is tempting to put a lot of emphasis on the graph for Cd from Obert’s textbook, but we have no idea what the level of accuracy nor the range of applicability. Even correcting for Reynolds number, the curves don’t allow a glide ratio of 23:1. Perhaps the curves are wrong or we are incorrectly using them. I don’t know.
@Oleksandr: I don’t have a need nor do I have the data to properly model fuel flow for a B777-200 for a condition of Cl<0.34. The fuel studies I am interested in are for speeds between Holding and LRC, and my efforts were to improve the accuracy of the fuel model in this range. If you are proposing a scenario in which you need to extend the range of your fuel model down to Cl=0.15, I encourage you to do so.
@David: Which version of the FCOM stated “Increase fuel required by 0.8% per 10 degrees C above ISA”? Engine? Airline? Which fuel quantity?
@Victor: The present thread is taking increasingly long to reload. Would you consider starting a new thread?
@Gysbreght: In the FCOM for the 777-200ER/Trent892, there are tables for LRC Critical Fuel Reserves for various plane weights and air distances. This is for an emergency descent to 10000 ft, level cruise at 10000 ft, 250 KIAS descent to 1500 ft, 15 minutes hold at 1500 ft, approach and land. There is the note: “Increase fuel required 0.8% per 10°C above ISA”. In addition to the 777-200ER/Trent892, the note applies to the following aircraft: 777-200/GE90-76B, 777-200LR/GE90-110B1L, 777F/GE90-110B1L,777-300/PW4090, corresponding to engines from all three manufacturers.
On the other hand, the FPPM for the 777-200ER/GE90-94B specifically says that fuel flows at cruise conditions increase by 3% for a 10K increase in TAT.
My guess is that the 3%/10K TAT correction is more relevant to MH370.
@BrianA @all
I was looking again at Brian’s paper re: MH370 speed estimate.
It is very good paper, but maybe we should think of Arc3 to Arc5 (20:41 to 22:41) the “possible straight and steady speed” period. I am thinking maybe MH370 stayed around M.84 until near the boundary Indonesian air space and then cut back to holding or slower speed. Also maybe there was a final minor turn after 19:41.
@Victor Iannello: Thank you for that explanation. If the 0.8% increment is due to the difference between the empirical theta exponent and the theoretical value of 0.5, then 0.8% corresponds to a theta exponent of about 0.68.
@Gysbreght: There are a couple of factors to consider:
1. Since the table lists the required fuel load, the adjustment of 0.8%/10K SAT refers to fuel efficiency, not fuel flow, as you probably know.
2. Under the envisioned emergency, the plane would be flying level at 10,000 ft. I assume this is a geometric altitude, not a pressure altitude. As such, an increase is temperature from ISA would reduce the pressure, and for a given speed such as 250 KIAS, would increase the lift coefficient Cl and drag coefficient Cd.
@Victor Iannello: Fascinating hypothesis. Not entirely correct, but never mind.
@Victor,
Re: “I don’t have a need nor do I have the data to properly model fuel flow for a B777-200 for a condition of Cl<0.34. The fuel studies I am interested in are for speeds between Holding and LRC, and my efforts were to improve the accuracy of the fuel model in this range."
As I explained before, I am not really interested in improving accuracy to below 1% rms. That makes no sense because we do not know how many 'coffeepots' were operating. I am rather interested in the feasibility of paths at low altitudes and high KIAS, and that is why the range below Cl<0.34 is important to me.
@Oleksander
“Yes. A recent example from my experience. I obtained a solution terminating at 25S. The altitude after descent predicted by my model was 10,000ft, speed was corresponding to 310 KIAS. Nice numbers. All the turns had logical explanations. But I ran into a problem: insufficient fuel.”
I’d be interested in summary of the path logic even if it does not seem to work for fuel.
[Comments here are closed. Please continue the discussion under the new post.]