
Introduction
Boeing recently conducted end-of-flight simulations for MH370 with the assumption that there was no pilot input. The results were released in November 2016 by the ATSB as part of a report entitled MH370 – Search and Debris Examination Update. Boeing observed that in simulations where the aircraft experienced a descent rate consistent with the values and timing of the last two BFO data points, the aircraft impacted the water within 15 NM of the 7th arc. However, the details and the likelihood of the configuration that caused the high rates of descent were not discussed.
In order to better understand the conditions leading to the descent rates suggested by the final BFO values, and to estimate the distance MH370 might have traveled after crossing the 7th arc, simulations were conducted using the PMDG 777-200LR model add-on to Microsoft Flight Simulator X (FSX). After making adjustments for differences between the PMDG 777 model and MH370, the flight characteristics were recorded under various conditions.
Modeling the End-of-Flight Using FSX
9M-MRO was a B777-200ER and the PMDG 777 model is a B777-200LR. The main differences are:
- Weight: The 777-200ER has a maximum take-off weight (MTOW) of 297.6 MT, while the 777-200LR has a MTOW of 347.5 MT, so the 777-200LR is in general a heavier aircraft. In the simulations, the zero-fuel weight (ZFW) was set to 174.4 MT to be consistent with MH370.
- Engines: 9M-MRO’s version of the 777-200ER has Trent 892-17s with 41,768 kgf (90,000 lbf) of thrust, while the PMDG 777-200LR has GE90-110B1s with 50,285 kgf (110,760 lbf) of thrust. Since only the results from the simulation after fuel exhaustion are used, the difference in engine thrust is not important.
- Wings: The 777-200LR version has a wing area about 2% greater area than the 777-200ER due to raked wingtips, which decrease the wing loading and reduce drag in cruise. The small difference in aerodynamic performance from the raked wingtips would produce little if any difference in the end-of-flight scenarios considered here, and are ignored.
In order to get realistic results from the FSX simulation, it is also important to recognize and compensate for other inaccuracies of the PMDG 777 model. In particular, it was found that the behavior of many systems when components have failed is not correct. Nonetheless, the basic aerodynamic model of the PMDG 777, when not at envelope limits such as stall conditions and transonic speeds, should be sufficiently accurate to model the flight characteristics of the B777. (Even a Level D simulator is not guaranteed to be accurate outside of the aircraft’s certified flight envelope.) The details of the flight dynamics model as incorporated into FSX are described by Yves Guillaume.
To model the flight behavior after fuel exhaustion, the simulation was conducted with the following initial conditions and programmed events:
- Initial conditions are stable flight at 220 KIAS and FL350, which is representative of flying with one engine inoperative and decelerating from the dual engine cruise speed, but still holding altitude.
- At t = 0, following events occur:
- The fuel level is set to zero. In addition to shutting down the engines, this prevents the APU from starting.
- The two fuel cut-off switches are set to OFF. Although it may not seem necessary to set the fuel level to zero AND employ the cut-off switches, in the PMDG model, the windmilling action of the engine shafts continues to supply electrical and hydraulic power if the cut-off switches are not employed.
- The primary flight computers (PFC) are programmed to degrade to “secondary” control law. Although the loss of power to the left and right transfer busses removes heat to the pitot sensors, which should automatically degrade the control law from “normal” to “secondary”, in the PMDG 777 model, the control law remains in normal mode without programming this failure. In normal mode, yaw compensation and envelope protection would be available, while they are not available in secondary law.
Implications of the BFO Values on Flight Dynamics
The last two values of BFO were 182 Hz at 00:19:29 and -2 Hz at 00:19:37. Assuming a BFO bias of 150 Hz and a nominal position at (30S, 98E), a groundspeed of 385 kn, and a track of 172°T, the corresponding descent rates are 4,000 fpm and 14,400 fpm. This represents an increase of 10,400 fpm over 8 seconds. After conducting studies of the various flight conditions that might cause these descent rates, the following observations are offered:
- If the aircraft has perfect lateral trim, i.e., the ailerons and rudder are positioned to perfectly remove any lateral (side-to-side) asymmetry of the aircraft about its longitudinal axis, the aircraft will fly relatively straight with no pilot input. The aircraft will also develop a phugoid flight pattern consisting of a damped-sinusoid vertical speed component superimposed on the quasi-steady vertical speed component. The quasi-steady vertical speed would correspond to a descent angle of about 3°, and a glide distance of greater than 110 NM is possible. However, the amplitude of the phugoid would be smaller and the period of the phugoid would be longer than the descent rates suggested by the BFO values. The case of a straight flight with a phugoid descent is therefore not studied here as it does not match the BFO values.
- If the aircraft is flying straight with little or no bank, the descent rates can match or exceed the descent rates suggested by the BFO values if the pilot commands a single nose-down input. The aircraft would correspondingly impact the ocean close to the 7th arc. It is also possible that the steep descent could be arrested with a subsequent nose-up input, and the aircraft could be piloted to glide some distance (> 100 NM) from the 7th arc before the aircraft impacts the ocean. Other than noting that with pilot input, the impact point could vary greatly in distance and direction from the crossing point of the 7th arc and still match the BFO values, this scenario is not considered here.
- If the aircraft has lateral (side-to-side) asymmetry about the longitudinal axis that is not removed by the appropriate positioning of the ailerons and/or rudder, the plane will enter a bank with a roll rate determined by the magnitude of the lateral asymmetry. As the bank angle increases, the descent rate also increases. With sufficient lateral asymmetry, the descent rates can match or exceed the descent rates suggested by the BFO values. This case is the case studied here.
Simulation of Banked Descent and No Pilot Input
After fuel exhaustion, the control wheel was turned about 4.5 units to the left in order to match the BFO values by introducing lateral asymmetry. (With the “no-pilot” assumption, the position of the control wheel in MH370 likely stayed in the neutral position. In the simulation, the control wheel was turned to reproduce lateral asymmetry resulting from other sources.) The control wheel input induced a roll rate of about 3.6 deg/s. As the bank angle increased, the descent rate correspondingly increased. In the simulation, the increase of descent rate from 4,000 fpm to 14,400 fpm required about 9 s, while the measured BFO corresponding to these descent rates are spaced at about 8 s. The lateral asymmetry caused by the rotation of the control wheel is therefore judged to be about equal to the lateral asymmetry of MH370 after fuel exhaustion.
A video showing the view from the cockpit during the simulated descent is included below. The aircraft rolls past 180° and impacts the water at a pitch angle that is almost vertical. During the descent, the speed reaches about Mach 1.1, and the descent rate approaches 60,000 fpm (593 kn). Although these speeds are outside of the performance envelopes that can be accurately modeled by the PMDG 777 model, it demonstrates that the BFO measurements are consistent with a very high speed impact.
Another video below is an outside view of the aircraft during the descent, showing how the increasing bank leads to increasing pitch down. At about 14 s, the deployment of the ram air turbine (RAT) can be seen and heard.
The figure below shows the trajectory of the aircraft. The position is adjusted so that the path crosses the 7th arc when the descent rate is about 4,000 fpm. There is only about 50 s between the time the descent rate reaches 4,000 fpm and the time of impact, and the impact is about 4.8 NM from the crossing of the 7th arc.
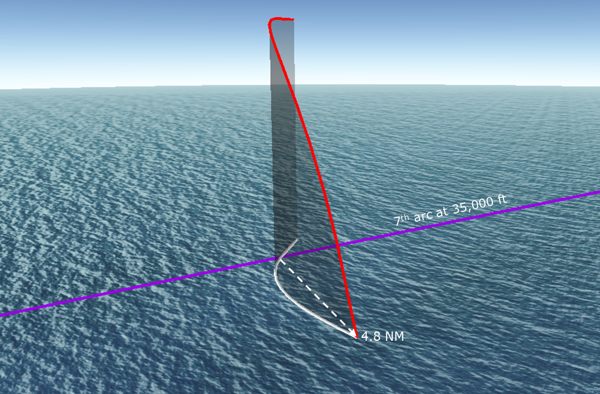
No wind is included in the simulation. However, considering that the aircraft impacts the water in about a minute and the winds were to the east, the effect of wind on the distance from the 7th arc should be small.
Possible Causes of the Lateral Asymmetry
The lateral asymmetry that induces the roll and the banked descent can be caused by a number of factors, including:
- Geometrical asymmetries (“bend”) that would cause yaw and bank when the control surfaces are in their neutral position. Normally, this would be compensated by a pilot by adjusting rudder and aileron trim. However, the amount of trim might not exactly balance the asymmetry so there would be residual out-of-trim.
- Asymmetric position of control surfaces caused by differences in hydraulic pressure that is supplied to the control surfaces on either side of the aircraft after fuel exhaustion.
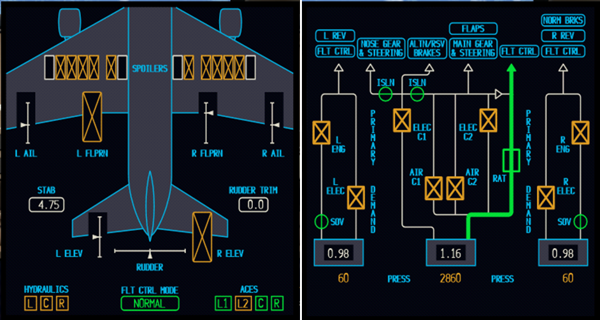
After fuel exhaustion and without the APU operating, the main source of hydraulic pressure is from the RAT, which supplies pressure to the “center” hydraulic system. As can be seen below in the synoptic displays for the flight control surfaces and the hydraulic system, when the RAT is deployed, only the right flaperon has hydraulic pressure, and the left flaperon is “bypassed”, so that the flaperon moves freely. If the position of the right flaperon is positioned slightly down compared to the left flaperon, the result would be a roll to the left.
In fact, we have an indication that this would occur. In the Aircraft Maintenance Manual (AMM) for the B777, in the section on the Ram Air Turbine System, there is this note that was found by Don Thompson:
Training Information Point
When the RAT is extended and hydraulics off, the airplane rolls left. Two to three units of right control wheel rotation are necessary to hold the wings level.
In the simulation, 4.5 units of rotation were added to simulate the banked descent. Based on the note in the AMM, it appears that this level of wheel rotation causes asymmetric flaperon positions that are similar to what would be expected when the hydraulic pressure is supplied by the RAT.
The RAT would be deployed within seconds of the second engine flameout. However, the log-on request at 00:19:29 is believed to occur about two minutes after the second engine flameout. (One minute is required to start the APU and one minute is required for the SATCOM to request a log-on after power-up.) Therefore, there is a two-minute delay between deployment of the RAT and the roll. In fact, the pressure to the left and right hydraulic systems might decay over some period of time, as determined by the consumption of hydraulic fluid by various systems as well as the limited flow that is available as the engines windmill and the engine-driven pumps operate at reduced capacity. These factors might contribute to the two-minute delay before the aircraft entered into the banked descent.
Conclusions
The BFO values at 00:19:29 and 00:19:37 suggest that MH370 was descending at an increasingly high rate. With the assumption that there were no pilot inputs, the descent rates suggest the aircraft was in a roll as it was descending. According to Boeing documentation, when the hydraulic pressure is supplied by the ram air turbine (RAT), the aircraft banks to the left, which may have been the cause of the rolling during the descent. Using the PMDG 777 model add-on to FSX, simulations were performed for a banked descent that matched the descent rates suggested by the BFO values. In the simulation, the aircraft impacts the water at speeds around Mach 1 and with nearly vertical nose-down pitch. The distance of the impact point from the crossing of the 7th arc is less than 5 NM.
Excellent post and well researched as always!
Many thanks Victor.
@Victor. Very good post.
Watching the video It seems the orientation of the aircraft is always such that there is no loss of visibility towards the satellite therefore quite probable the transmission was finally lost due to impact. Is this your conclusion in this scenario ?
@VictorI,
Excellent post! Is there any reason to cause the aircraft to turn to the left during the two minutes befoure rolling left?
Timely Victor thank you…
check BFO in text I thought was 182 (not 172) at 00:19:29
@TBill: Thank you for catching that. It’s fixed.
@DrB: A turn to the left before the 3.6 deg/s roll could be caused by many things, including rudder out-of-trim and partially functioning right and left hydraulic systems as the pressure decays.
@JohnM: My guess is that the SATCOM link was lost either because the APU ran out of fuel or because of the crash.
@DennisW,
You said:” 1> None of Holland’s examples show any overshoot behavior at all except the 18:25:27 event.”
That is not true. Every BFO he shows is evidence of overshoot because they are all too high. The temperature is known to be below the set point (and therefore the frequency is also low) at the start of every SDU re-boot. Holland’s BFOs are all too high and decay with time from the high side. They are all high because of the temperature servo overshoot.
You also said: “2> The BFO logged at 18:25:27 is exactly what you would expect it to be based on the radar data. That is truly a remarkable occurrence if the oscillator was simply drifting through a warm up transient. “
As we have explained 4-5 times to you (and I promise this is the last time), when the OCXO has a sufficiently large initial temperature error, the first transmission (the log-on request) will always occur when the BITE test for small temperature error is FIRST SATISFIED, and the frequency error will be small. This is what occurred at 18:25:27. The frequency error does not stay small, however, because the servo velocity error is still large and overshoot occurs for the subsequent transmissions. It is no coincidence at all. It is constrained by the SDU design to happen that way.
You also said: “As far as I am concerned Holland’s data reflects all of the BFO values collected in each transient case. None of them replicate the shape of the 18:25:27 BFO history. I think you are making an assumption that is not supported by anything in Holland’s paper.”
My Figure 3 shows that all of Holland’s log-ons match the same shape of the frequency transient curve. When the initial temperature error is fairly small, the BFOs don’t get measured until after the peak frequency overshoot occurs. When the initial temperature error is large, the first two BFOs occur prior to the peak overshoot. That prediction using the servo model I derived exactly fits all the log-on BFO data, including at 18:25.
@DrB
We are not converging. No matter. I appreciate your attempt.
@Victor
Let me echo previous comments, Victor, excellent post. I’d make three observations;
1. Given that both PCUs associated with the left flaperon would be in bypass mode I’d suggest that the left flaperon being positioned slightly up compared to the right flaperon might be a more likely cause of a roll to the left.
2. Given the propensity of the airplane to roll left under the RAT at a rate equivalent to two to three units of wheel rotation, might that slower progression to the higher bank angles that you modelled with 4.5 units of wheel rotation explain the two minute delay? Could you model what 2.5 units of wheel rotation to the left looks like?
3. Given the beam-steering/coverage limitations of the SATCOM antennae and the likely orientation of the airplane across the eight seconds from 00:19:29 and 00:19:37, can we infer anything about where in the spiral the airplane was at that time? I’m thinking that if the airplane was steeply nose down then it is unlikely that it could have been moving through the ~45° – ~225° arc of the spiral between 00:19:29 and 00:19:37 as maintaining line of sight to the satellite would have proved problematic.
@Mick Gilbert: Thanks for your comments.
1. Since we are talking about relative positions, left positioned up relative to the right, or right positioned down relative to the left, is basically the same thing.
2. The roll rate is roughly proportional to the control wheel position. At 2.5 units of rotation, it would take abut 16 seconds to increase from 4,000 fpm to 14,400 fpm, compared to the observed spacing of 8 seconds.
3. I haven’t thought about the line-of-sight between the antenna and the satellite, but if the belly of the aircraft is facing the satellite, it might be hard to maintain the link.
@Victor
The fact that you approached 60,000 ft/min from FL350 suggests that a intentional dive from a much lower altitude could hit BFO value of 14,400 ft/min. Quick test I think on FS9 I can almost do it from 5000-ft, but that’s a stretch.
Nonetheless the apparent pre-crash shedding of aircraft skin/debris/flapperon due to stresses seems more consistent with the extended dive you are showing.
@VictorI,
@Mick Gilbert,
Do you think the aircraft could have turned left as much as 90 degrees before the high roll rate began? More than 90 degrees?
> Brian Anderson says:
> The two 406 ELTs on MH370 are designed to trigger
> upon a deceleration of about 2.5G or more. However,
> the data transmission protocol delays the first transmission
> for approximately 50 seconds after triggering.
> If the ELT antenna is underwater before the 50 second delay
> elapses then no signal will be radiated.
Then why wait 50 seconds ?
Is there a actually good reason why fixed+portable ELTs both lack a water sensor ?
I’d see good reasons for having one:
• it is not expensive
• “soft” ditching without ELT activation ≠ 100% guarantee that life rafts be deployed and their ELTs activated
• and they don’t transmit on satellite-monitored 406 MHz. Fixed+portable ELT both do.
So wouldn’t it be helpful if fixed+portable ELT activated upon contact with water ?
> Peter Norton:
> Ok, but we do agree that MH370’s portable ELT (ELTA ADT 406 AP)
> is designed to float, right ?
>
> Mick Gilbert:
> No, Peter, absolutely not. The portable ELT is
> exactly the same as the “fixed” ELT sans fixtures.
> It is not designed to float.
> If the portable unit sank it could not resurface.
Mick, I don’t believe that is correct.
• The portable ELT is equipped with a float. See illustration on pages 14+30+35 of the manual.
• The official designation for P/N 01N65910 (listed in the Factual Information report) is “ELT ADT 406 AP With Float”, see fact sheet, which also lists
“ELT with float free capability” in section 2 (“advantages”) and shows a picture of the ELT floating in water on page 2.
• See also this fact sheet describing ADT 406 AP as “Automatic/Portable ELT with float free capability”.
• The manufacturer states “ADT 406 AP designed for Automatic Portable application when floatation is required” (page 1) and shows photographs of the “floating device” (page 3).
• see further pictures on the manufacturer website
• From the pictures you see that the floating collar encompasses the ELT’s upper half, so that its lower half is below the waterline, whereas the antenna is out of the water and in upright position. “The ELT can be removed from his fixed position and is than able to float in upright position.” (source)
Based on all that, I think the portable ELT is indeed designed to float.
So if the portable ELT escaped the sinking cabin, it would float back to the ocean surface and transmit on all 3 frequencies (121.5 + 243 + 406 MHz) – assuming it was activated by the impact force, as it seems to lack a water sensor.
Therefore the question remains:
Could the portable ELT escape the sinking cabin ?
I have read that “the portable ELB’s stowed in the cabin at various locations […] are usually activated by water [and] are designed to float on the surface of the water. The water usually dissolves a paper/cardboard collar holding a folded antenna in place. When the collar releases, the antenna springs up and the transmitter starts operating.”
But this procedure does not seem to apply to ADT406AP, which is fixed to a bracket wall mount (p/n 02N60051). On page 30, the manual says in order “to remove the beacon from its bracket”, “unfasten the strap [and] pull firmly to brake the retaining metallic strap”.
It doesn’t sound like water alone would be able to do that.
Maybe the crash impact forces would break it free (detach it from the wall) ?
Then it would float to the surface and transmit.
(Crash-induced cabin disintegration would also be needed, as the portable ELT was located “inside a coat closet”. But judging from the aircraft pieces retrieved so far, this seems to have occurred.)
> lkr says:
> […] lab tests, and materials analysis of the flaperon, flap, and
> perhaps the tailplane pieces, are probably the best hope to
> differentiate between high-speed and low-speed entry. That analysis
> shouldn’t be seen a once and done matter — for instance we now have
> it that many smaller pieces failed under tension…
> What caught my eye in seeing this is that the plywood and metal
> “models” give a sense of how low-priority the drift studies were in
> the first 2 years. This bodging is what you do for a trial run when
> no one will give you a budget line to do it right with real aircraft
> components.
Thanks. In light of your point of view, the story makes sense now to me.
@Victor
@DrB
Re: “Since we are talking about relative positions, left positioned up relative to the right, or right positioned down relative to the left, is basically the same thing.”
Victor, yes, I agree that the effect is the same but, given the hydraulic configuration, an upwards displacement or an uncommanded upward movement of the left flaperon is far more likely than a downward displacement or movement of the right. I seem to recall reading somewhere that with both PCUs in bypass aerodynamic forces are likely to cause an upward deflection of the flaperon.
Re: “The roll rate is roughly proportional to the control wheel position.”
Okey doke, but is the roll rate and associated rate of heading change consistent throughout the manoeuvre? I’ve watched the video a few times to try to get sense for both. Can you get an FDR-like report from that simulated flight?
Re: Line of sight to the satellite, I get a sense that from about the 20 second mark in your simulation it would have been difficult to maintain a connection.
As an additional observation, the terminal speed and rate of descent surprises me; with that pair of big blunt engines/speed brakes slung under the wings I wouldn’t have thought that Mach 1+ was possible without a reasonable nudge of thrust. On the other hand, that near vertical, slightly on its back entry into the water is pretty much how I’ve pictured it since debris items 18 and 22 were found and identified.
Re: “Do you think the aircraft could have turned left as much as 90 degrees before the high roll rate began? More than 90 degrees?”
DrB, I’m not sure, I don’t think so but it would be interesting to see what effect the winds on the day might have had.
@TBill
While the subject has changed to the opposite of what you (and I) suggested in our latest comments on the previous topic I’ll wait with further exploring your suggestions on this matter.
All I can say now is this simulation of @VictorI seems an exceptional extreme to me compared to the 10 Boeing-simulations.
The majority of those showed far less extreme scenarios with even a few letting the plane stay airborne for ~20 minutes.
I think the details of those Boeing-simulations are necessary to make a fair judgement/interpretation on this latest simulation from VictorI.
Regarding the debris I cann’t believe all those trailing edge and other wing/surface control pieces seperated during a vertical high speed dive. It did not happen in the Silkair vertical high speed dive (only tail pieces seperated) and not in the ChinaAir 747 vertical high speed dive (also only tail pieces seperated).
Then it seems impossible to me a nose-gear door piece that size without any compression damage could survive a 593kn vertical impact like that.
The same goes for the Rodrigues-closet panel and the monitor mounting.
No way those pieces could have survived the way they did in such a brutal impact.
@Ge Rijn
>No way those pieces could have survived the way they did in such a brutal impact.
Just to piggy back tangentially: Also no way there was not an alive and active pilot in the cockpit throughout the EOF, if this was a premeditated and successfully executed act…which it was.
Victor, great blog that is fantastic to follow. Thank you for kick-starting it in the wake of the search for M9-MRO coming to an end.
It seems to me that the collective great minds of physicists and mathematicians are unable to reach a consensus on the terminus of M9-MRO. People’s pins are all over the map and that usually means no parties are elbowing their way to the front lines to fund a new search. The data isn’t clear-cut and until new data surfaces, the location of M9-MRO will likely remain a mystery, IMO. MY is not going to fund a new search. No doubt, they filed it indefinitely under “very embarrassing events”.
If M9-MRO is ever located, what are the chances that data can still be gleaned from the fuselage, CVR and FDR that are scattered at more than -5km below sea level? Perhaps through a meticulous and very costly process of elimination one can ascertain what did not happen but it is doubtful that the real sequence of events and subsequent actions of the night of March 8th, 2014 can ever be established.
@Donald
Yes, I have the same assumptions mainly based on the debris found till now.
But the problem is, there is still no conclusive proof for a ditch-like, low AoA, low speed impact.
As there is no conclusive proof for a high speed dive impact.
All simulations together show imo mainly failing to be specific enough by their variety of possibilities.
And the 8 sec. calculated high descent rate from the final BFO’s cann’t tell the whole story of the descent till impact. It gives only a snapshot.
We need independent detailed forensic analysis and reports on the debris.
This should be possible. Not all debris-pieces are in the hands of Malaysia (if there is reason to mistrust them which many seem to do).
Key-pieces like the flaperon and the outboard flap piece are with France and Australia.
The best point of comparison is Egypt Air 990
http://www.webcitation.org/5zlFg31jj?url=http://www.ntsb.gov/doclib/reports/2002/AAB0201.pdf
two separate debris fields: wing parts, engine, front landing gear door, stabiliser all came off separately before impact.
I think it is important to keep in mind that there are many descent profiles that match the 0019 BFO data. Victor has demonstrated one “simple descent pattern” that matches. It helps to visualize what a steep descent looks like.
In the Level D simulator tests we conducted on Nov 2, 2014, we observed significant differences between each FE trial, and huge descent rate changes (up and down) within each trial. We never observed a “simple descent pattern”…one that did not have phugoid oscillations during at least part of the decent. Usually the phugoids occurred while in a bank (turning), not flying on a straight heading. It always took from 2 to 3 full 360 degree turns before impact, not a single partial turn.
For example, in one trial, a turn started immediately after FE and it took only 52 seconds for the bank angle to reach ~90 deg. After 69 seconds, the plane was down to 15,000 feet (from 35,000) and the IAS was pegged (>500 kts indicated). However, at 148 seconds, the plane was also at 15,000 feet because it climbed and leveled out some between 69 and 152 seconds, converting the high speed at 69 seconds (KE) to altitude (PE), followed by another descent back to 15,000 feet. The bank angle was high and the descent rate very steep again at the time of impact (250 seconds). In a different trial, it took over three complete 360 deg turns and 8 minutes from FE to impact.
Here is a video clip from a different trial: https://goo.gl/RFWqQw
Victor: I wanted to mention something relevant to the trim state discussion. During one of the trials, Paul Matson commented that when a pilot trims the airplane for maximum efficiency at cruise altitude (minimizing fuel consumption for a given speed), the pilot tweaks the rudder trim. But the system automatically tweaks the aileron trim in response to the rudder trim adjustment in order to keep the wings level to maximize efficiency. We know that following FE, the rudder trim goes back to the position manually entered on the TAC. But what happens with the aileron trim?
@Ge Rijn: All I can say now is this simulation of @VictorI seems an exceptional extreme to me compared to the 10 Boeing-simulations.
You must remember that Boeing and I took different approaches. They studied a number of configurations and observed whether any of them matched the descent rates implied by the BFO values. On the other hand, I assumed the BFO values were valid, and imposed a roll rate to match the descent rates, without regard to the many system interactions that were occurring. Based on the flaperon asymmetry under RAT power, the imposed roll rate seems justifiable.
@All
I have now updated my flight path proposal to suggest a great circle route from BEBIM to Wilkins Runway (Antarctica).
I am basically proposing a flight path where MH370 went around Sumatra going south directly at the boundary of Indonesian airspace and avoiding potential detection by radar assets in Sumatra. It then went on to waypoint ISBIX and further onto BEBIM. Finally, it was flying towards Wilkins Runway with reduced speed.
My contention is that this is the only possible flight path that follows waypoints all way long. It is also a good fit with the various available drift studies and ends in an area that has not so far been searched.
https://www.docdroid.net/GvlrLaV/mh370-waypoint-30.pdf.html
Comments again very welcome.
@Nederland
I read the western debris field consisted mainly of the left engine and left engine pieces, two wingpanel-pieces and an almost compleet nose landing gear assembly. No landing doors are mentioned seperately.
I wonder how this almost complete nose landing gear assembly seperated during the dive (was the gear deployed?).
Only two elevator pieces are specifically mentioned as floating surface control pieces. No other wing related pieces are mentioned to be found floating.
@ALSM
“I wanted to mention something relevant to the trim state discussion. During one of the trials, Paul Matson commented that when a pilot trims the airplane for maximum efficiency at cruise altitude (minimizing fuel consumption for a given speed), the pilot tweaks the rudder trim. But the system automatically tweaks the aileron trim in response to the rudder trim adjustment in order to keep the wings level to maximize efficiency. We know that following FE, the rudder trim goes back to the position manually entered on the TAC. But what happens with the aileron trim?”
The recommended rudder trim technique is to engage the autopilot in HDG SEL or HDG HOLD mode and then trim the rudder in the direction corresponding to the down (low) side of the control wheel until the control wheel is centred. The aim of the exercise to centre the control wheel to ensure there are no aileron/spoiler inputs, thereby minimising drag. With the control wheel centred, there is no aileron/spoiler input and consequently no aileron trim input.
The PFCS reverts to secondary mode after both engines fail and any TAC inputs are then removed. However, any manually applied rudder trim inputs remain. All else being equal, the aircraft is in a trimmed state and should theoretically maintain straight flight when the PFCS reverts to secondary mode and the autopilot disengages. However, only a few of the control surfaces are powered when the RAT is supplying hydraulic and electrical power. The left flaperon is unpowered in that configuration and floats up. My understanding is that the up-floating flaperon is what causes the left rolling moment described in the AMM.
@ALSM: In order to get to the descent rates implied by the BFO values without a nose-down input, I believe a steep bank is required. In your Level D simulations, the roll rate was continuously changing, caused by many of effects interacting, including the rudder out-of-trim, the RAT start, the APU start/flameout, engine restarts, etc. In one simulation, there was even an unexplained, violent correct from a very steep bank to level wings, which I suspect was an artefact of how the simulation was configured. I am not sure that any Level D simulation would accurately model how the systems would actually interact. I am positive that the PMDG model gets these interactions wrong when systems fail, which is why I deliberately prevented these effects in the simulation by forcing certain events to occur.
In effect, my simulation can be viewed as the simplest of all flight patterns with no pilot input that satisfies the BFO values, as only a single, constant, roll rate is imposed. Certainly more complicated flight conditions are possible if the roll rate changes due to changes in the configuration of the aircraft.
(@Andrew: Please help with this.) I believe a pilot would trim the rudder in cruise by watching the aileron trim indication that shows the rotation of the control wheel relative to the column. Basically, the pilot would adjust the rudder trim until the control wheel is in the neutral (zero aileron trim) position. At that point, no aileron trim is added by the autopilot. If the rudder is out-of-trim, then there would be some aileron trim added. I don’t know if that is removed if the autopilot is disconnected.
@Andrew: I responded to @ALSM before seeing your post.
If the rudder is out trim, and the A/P is supplying aileron trim, is that trim removed when the A/P is disengaged? My guess is the aileron trim, which is related to the actual control wheel position, is not removed.
@Victor. Your simulation has replicated a banking rate which would satisfy the BFO descent rates, though it does not explain how such a bank could arise, commencing at 2 mins (not that you intended that it did). Some at least of the roll asymmetry would have been there during the preceding 2 mins, and that would have seen the aircraft banking into a steep dive well before reaching the 2 min mark. I do not see how the aircraft could have got to the point where this simulation resulted.
The, “some at least” above is about a complication. You have not included the APU but the effect of that would be to reduce the roll rate due to RAT alone. The APU should provide power for support of full hydraulics via electrically driven pumps. When it comes on line a minute after f.e., for the ¾ min preceding that the hydraulic supply will be from just the RAT: that is, unless the RAT receives hydraulic supply supplement enough (reservoirs, engine windmilling) to keep the left flaperon PCUs from going to bypass mode. Even for that, the PMGs or backup generators would need to provide one at least of the left flaperon’s PSAs/ACEs with power. With only RAT hydraulic supply there will be the added left-rolling effect of asymmetric flaperons to supplement that from the upward thrust of the RAT. Hence the roll rate during that ¾ min can be higher than later with the APU running. That would need to be taken into account in assessing what happens in those 2 mins. Also, once the APU fuel is exhausted, the roll rate will increase, which does raise a question about the effect of that in your descent demo simulation.
I have raised asymmetry from the flaperon and RAT before, as I have the satellite connectivity in a spiral; then it was to do with Boeing simulations. As to the effect of the APU on roll rate in those, the ATSB reports, “In the simulator, when the fuel tank is empty, zero fuel is available to all systems fed from the tank. However, in a real aircraft, various aircraft attitudes may result in unusable fuel (usually below engine/APU inlets) becoming available to the fuel inlets for the APU/engines. If this resulted in APU start-up, it would re-energise the AC buses and some hydraulic systems.” Yes indeed, but they seem not to realise that a simulation without APU inclusion is not worth much, for it will affect roll rates before the first BFO and after APU’s fuel is exhausted, that is unless supplemented sufficiently for the APU to make no difference.
One caution I should add is that the APU would need to have sufficient AC capacity left for the electric hydraulic pumps. The ATSB has not mentioned this and these are the last of loads that can be shed. The air driven pumps would not be supplied by the APU at 30,000ft.
@Ge Rijn
The accident report is not very specific about this:
“The western debris field, which was estimated to be 62 meters by
66 meters …, contained mainly parts associated with the left engine and various other small pieces of wreckage (including portions of two wing panels, fuselage skin, horizontal stabilizer skin, and the majority of the nose landing gear assembly).” (p. 34)
There is no indication in the accident report that the gear was deployed.
Information on the eastern debris field is also unspecific, the report only says that “most” pieces were very small, indicating high speed impact (Blaine Gibson and others also found many more pieces potentially from MH370, but they are to small to be identified and therefore not listed in the debris report).
@Mick Gilbert said, “Victor, yes, I agree that the effect is the same but, given the hydraulic configuration, an upwards displacement or an uncommanded upward movement of the left flaperon is far more likely than a downward displacement or movement of the right.”
You are missing my point. I never stated the position of either flaperon relative to the trailing edge of the wing; I only stated the position of one flaperon relative to the other. The right flaperon lower than the left flaperon is equivalent to saying the left flaperon is higher than the right flaperon. @Andrew believes the left flaperon when in bypass mode floats up. That’s very believable.
@Victor
“If the rudder is out trim, and the A/P is supplying aileron trim, is that trim removed when the A/P is disengaged? My guess is the aileron trim, which is related to the actual control wheel position, is not removed.”
The aileron trim is only provided for the pilots to trim the aircraft during manual flight. It does not operate during automatic flight. When the autopilot is engaged, the AFDCs command any aileron inputs required to keep the aircraft steady. Those inputs are removed if the autopilot is disengaged.
@David: The asymmetry of flight control surfaces supplied only by the center hydraulics system was known. However, the AMM statement says very unequivocally that a roll to the left would occur, corresponding to a wheel rotation of 2-3 units. This is important confirmation that a roll would occur, and also gives some indication of the magnitude of the roll.
As I explained, there are many systems interacting, and I think there is a high possibility that the Boeing simulations don’t accurately describe the effect of events like APU start/flameout, RAT deployment, engine restarts, pressure decay of the hydraulic systems, internal bus voltage decay of individual components, etc., all of which affect electrical systems, hydraulic systems, and aerodynamics.
I am not sure that there was a high degree of lateral symmetry before the high roll rate at 2 minutes after flameout. Most of the high roll rate might have been induced by the flaperon asymmetry from the RAT-supplied pressure to the center hydraulics.
I think it is possible that the log-on of the SATCOM occurred after the APU had already flamed out. We don’t know how long the capacitors on the DC bus of the SATCOM provide power when the SATCOM is not continuously transmitting. (The two transmissions at 00:19 were very short.) Perhaps that’s why we see the curious timing of high descent rates and the log-on activity. Already, only the RAT was supplying hydraulic pressure.
There are so many systems and components to consider, and so little knowledge about how these systems would actually interact after dual engine fuel exhaustion and possible restart of the APU, all with no pilot intervention, that my approach was to only study the bare-bones aerodynamics.
@Andrew: Let’s not talk about “aileron trim”, because as you say, it is inoperable while in A/P. Let’s take the case where the rudder is out of trim, and while in HDG HOLD mode, the control wheel is rotated 2 units, as viewed on the scale on the column. If the A/P is disengaged, do you believe the wheel automatically rotates back to the neutral position? Or would the wheel position remain rotated? I think that is really the question that is being asked.
Andrew and Victor:
Regarding efficiency optimization procedure: The method described by Andrew may be one typical way pilots use to level the wings. However, Paul Matson demonstrated the method he teaches, which is to tweak the rudder trim (TAC manual setting) while watching some numbers on a CDU he configured to show some performance variable…fuel flow? Not sure exactly what he was displaying, but it was all captured in the GoPro video. I could ask him to describe exactly what he was doing, but the point is that different pilots do this different ways. Paul is a bit of a perfectionist and likes to tweak for minimum fuel cost using the numbers.
Also, it is relevant to note that “level wings” is not synonymous with a neutral stick position. Any lateral asymmetry in mass, lift, drag, etc. will lead to some aileron input to offset the asymmetry, as required to level the wings (required for max efficiency). That input can come from the AP or the PF. As Andrew explains, when the AP is flying, it controls the aileron trim, and when the PF is flying manually, he has manual control of the trim.
Bottom line is: The state of the cruise aileron and rudder trim positions, post FE, will influence which way a turn will start, and how fast it winds up.
@VictorI @Andrew @ALSM
“@Andrew believes the left flaperon when in bypass mode floats up. That’s very believable.”
I sure like to believe @Andrew also but being such an important detail, is there any official documentation on it?
To me it seems odd to design the attitude of a flaperon this way.
It would mean the flaperons PCU’s have to be actuated constantly to keep the flaperons down in a neutral position during cruise flight putting them and the hinges under constant stress.
Does not sound very efficient to me.
More efficient would be when the flaperons were designed to be aerodynamically neutral when in neutral position.
I tried to find an official statement on this issue before but could not find any still.
@Victor
“Let’s take the case where the rudder is out of trim, and while in HDG HOLD mode, the control wheel is rotated 2 units, as viewed on the scale on the column. If the A/P is disengaged, do you believe the wheel automatically rotates back to the neutral position? Or would the wheel position remain rotated? “
The control wheel should automatically return to the neutral position. In the example you mentioned, the AFDCs automatically command the aileron input required to keep the aircraft heading steady. The AFDCs also backdrive the control wheels to move in accordance with the aileron input. If the autopilot is subsequently disengaged, the aileron and backdrive inputs are removed and the centring mechanism moves the control wheels back to the neutral position.
Ge Rijn: Re: “To me it seems odd to design the attitude of a flaperon this way.”
I don’t believe it is caused by a design flaw. I think it is normal and expected. Every hinged wing control surface, when allowed to float freely, will naturally float to the position where it is no longer supporting any of the aircraft weight (other than its own weight), not the position of the wing TE.
@Andrew: Thanks. It makes sense. So adding aileron trim when manually flying means the “neutral” position of the control wheel is rotated relative to the “zero” position. Hands-off the wheel, the wheel would be rotated with aileron trim applied. It’s how rotational back pressure would be relieved, much the way trimming the stabilizer removes pressure on the column.
@ALSM
“Also, it is relevant to note that “level wings” is not synonymous with a neutral stick position. Any lateral asymmetry in mass, lift, drag, etc. will lead to some aileron input to offset the asymmetry, as required to level the wings (required for max efficiency). That input can come from the AP or the PF.”
The technique I described is the primary rudder trim technique recommended by Boeing. Paul may have been doing something similar by using the exact aileron/spoiler position indication from the CDU instead of the aileron trim index markings on the top of the control wheel. Either way, the aim is to ensure there is zero aileron/spoiler input. As you said, that doe not mean the wings will be level. If a rudder input is required, it’s likely the aircraft will have a small angle of bank with a small amount of side slip.
@Victor
“So adding aileron trim when manually flying means the “neutral” position of the control wheel is rotated relative to the “zero” position. Hands-off the wheel, the wheel would be rotated with aileron trim applied. It’s how rotational back pressure would be relieved, much the way trimming the stabilizer removes pressure on the column.”
Yes, precisely!
@Ge Rijn: “It would mean the flaperons PCU’s have to be actuated constantly to keep the flaperons down in a neutral position during cruise flight putting them and the hinges under constant stress.”
As @ASLM implied, I think you are misunderstanding. In the unpowered, “bypass” mode, the flaperon freely pivots. It will find the position where its weight balances the aerodynamic force (assuming the center of mass and the center of aerodynamic force are roughly coincident), which occurs at a flaperon position rotated up relative to the trailing edge, and little torque and force will be transmitted to the wing through the pivots. On the other hand, the powered flaperon, which has its position maintained by hydraulic pressure, will transmit upward force (lift) to the wing. The net effect of both flaperons is to cause the plane to roll at some rate with the control wheel centered, as the AMM suggests.
@Ge Rijn
“I sure like to believe @Andrew also but being such an important detail, is there any official documentation on it?”
I’m sure we covered this in a previous discussion. The flaperon PCUs only operate in two modes; normal and bypass. Bypass mode occurs any time there is an electrical or hydraulic failure on the PCU. The left flaperon PCUs are powered by the left and right hydraulic systems. However, the RAT can only power the centre hydraulic system flight controls. Consequently, both of the left flaperon PCUs will operate in bypass mode if the RAT is the only source of hydraulic power, According to the AMM: “If both PCUs of the same flaperon are in bypass mode, the flaperon can move freely in both directions. In flight, the airloads then cause the flaperon to move up a maximum of 10 degrees.”
@All:
You get interesting views of both the cockpit and the aircraft if you view both videos at the same time. However, the videos are not exactly synchronized. If you first start the second (outside view) video, wait 2 seconds, then start the first (cockpit view), the two videos will be fairly well synchronized, as indicated by the timing of the impact.
@Victor
Re: simulation
Very nice, but lately on FS9 I’ve been trying to look at Arc5 to Arc7 from real world weather and time of day.
>>What time of day and date are you using? I was expecting more clouds and less Moon.
The AMM (Ch 27, Flight Controls) states:
“If both PCUs on a flaperon are in the bypass mode, the flaperon can move freely. In flight, the aerodynamic lift then causes the flaperon to move 10 degrees up from the faired position.”
Concerning comments related to the sequence of events after fuel exhaustion: the only actively pressurised hydraulic system is the centre system. The RAT extension occurs in two seconds, initiated by loss of hydraulic systems pressure (in all, 5 conditions are monitored).
The leftward bank will be initiated before the APU briefly supplies power.
The brief APU start will enable the AC Motor Pumps in all L, R & C systems, however, the volumetric capacity of these pumps is only 6 gal/min. The jackscrew motor controlling the horizontal stabiliser is likely to be in motion during this time, it consumes more than an 8 gal/min of the available flowrate in each system.
After the APU flames out, only the RAT and centre system remains pressurised and the flaperon fairs again.
With no correction for the rolling moment caused by the left flaperon, the scenario described by Victor develops.
Whether a full flight, level D certified, simulator would be designed to model the PCU behaviour, is to be verified. I certainly expect Boeing’s investigations to have included the flaperon PCU behaviour. However, the onset of the roll in such a non-normal event would be evident visually, either by reference to the outside horizon, the PFD or standby attitude indicator.
@Ge Rijn: Re: “To me it seems odd…”
In the case of extreme non-normal conditions, such as loss of all normal hydraulic power, there has to be a degradation in capabilities. The degradation is ‘managed’ and described in publications such as the AMM and FCOM. The more extreme the non-normal event, the more extreme the additional workload for the crew.
:Don
@TBill: In these simulations, I was not trying to match the date and time of day of MH370. Any information about the sun, moon, clouds, etc., should be ignored in the simulation.
@Don Thompson: I don’t quite understand why this tendency to roll to the left under RAT power was never cited by Boeing or the ATSB. I also don’t understand how any simulation could last for many minutes after flameout under RAT power.
@nederland
The full quote from the NTSB Air Accident Brief on EA990 states,
“The western debris field [330m from the eastern field], which was estimated to be 62 meters by 66 meters and was centered about 40° 20’ 57″ north latitude, 69° 45’ 40″ west longitude, contained mainly parts associated with the left engine and various other small pieces of wreckage (including portions of two wing panels, fuselage skin, horizontal stabilizer skin, and the majority of the nose landing gear assembly).”
The left engine did appear to suffer much less destruction than the right engine found in the main eastern debris field.
:Don
@Andrew @ALSM @Don Thompson
Thanks. Yes, this subject was covered before. I guess I missed the AMM statement.
On:
“With no correction for the rolling moment caused by the left flaperon, the scenario described by Victor develops.”, I wonder if this rolling moment is not compensated by the right flaperon under RAT or otherwise automatically without pilot input while the right flaperon stays actuated with one PCU.
Or what will the right elevator do under RAT which is also in bypass-mode and free-floating then. Will it also move upwards and perhaps compensate for the rolling moment of the left flaperon?
If it does I assume there will be a ‘pitch-moment’ but also a rolling moment working against the left flaperon rolling moment.
Anyway, imo there must be a compensating reason how the plane could stay airborne up to ~20 minutes after the APU stopped in the Boeing-simulations. What could this have been?
@Ge Rijn: “I wonder if this rolling moment is not compensated by the right flaperon under RAT or otherwise automatically without pilot input while the right flaperon stays actuated with one PCU.”
In secondary control law under RAT power, the right flaperon would not be controlled to compensate for the free left flaperon.
The simulator shows that a B777 can stay aloft for anywhere from about 3 minutes (tight turns and a 1 to 3 turn spiral descent) up to 20 minutes (long, wings-nearly-level glide). It depends on initial conditions, especially the position of the cruise phase trim positions. If it so happens that the trim is very close to neutral following FE, then you could see a longish glide, though probably not on a constant heading. The BFO data and lack of 0021 IFE login suggests about 4 minutes from FE to impact, thus implying a fairly steep descent on average. But there were probably phugoids in the mix, thus not a steady descent rate or steadily increasing rate. Probably more messy with some ups and downs.
@Nederland
Another interesting feat about flight EA990 regarding this topic and MH370 is the plane initially survived a 30.000ft/min. near 700mph dive to ~16.000ft leveled out and then climbed back to ~24.000ft with both engines shut off.
So also during this near Mach 1 dive the plane stayed structurally intact and controlable at least till ~24.000ft for otherwise it could not have leveled out and climb back to ~24.000ft.
An overview of the events is discribed fairly detailed in this article:
http://www.nydailynews.com/archives/news/egyptair-flight-990-radar-blip-oct-31-article-1.855266
@ALSM
@Paul Onions stated some days ago that the IFE would be power-shedded when only APU power is available.
Can you can confirm this?
@Ge Rijn
From other accident reports, it very much looks like problems come in at low altitude because of higher atmospheric pressure. Even a dive as described above is not so much a problem at relatively high altitude.
Overall, I would be interested to know whether MH370 could have gone 10 nm off the arc, given the current interpretation of the BFOs, otherwise I think I have another valid point in the proposed flight path, linked above.
@GR [concerning Egyptair990] “Only two elevator pieces are specifically mentioned as floating surface control pieces. No other wing related pieces are mentioned to be found floating.”
It’s my assumption that aside from the control surfaces, fairings, etc, that we see from MH370, the main wing sections rarely float for long, and are rarely represented in debris fields [?after a day or two?]. In Boeings, at least, the main structure of the wings are entirely [non-composite, non-honeycomb] metal structures. Same for airframe and fuselage skin.
Happy to be corrected!
@Ikr
I think you are completely right but it was not what I was trying to say.
The EA990 report says many pieces of floating debris were recover but it only mentions the two elevator pieces specifically.
I mean no other conrol surfaces, fairings etc. like in MH370’s case are mentioned to have been recovered while floating.
I assume if they mention those two floating elevator pieces specifically they would also have mentioned a floating flaperon, outboard flap section or aileron and flap fairings. This kind of findings would be too important to leave out of the report imo.
So I assume no more control surface/wing related pieces where recovered while floating.
Indicating to me non of those pieces seperated in the dive but were all destroyed in the high speed impact sinking immediatally after.
Indicating to me further MH370 suffered a different faith regarding all those trailing edge, control surface, wing/engine related parts found till now.
@Ge Rijn
“Or what will the right elevator do under RAT which is also in bypass-mode and free-floating then. Will it also move upwards and perhaps compensate for the rolling moment of the left flaperon?
If it does I assume there will be a ‘pitch-moment’ but also a rolling moment working against the left flaperon rolling moment.”
The elevator PCUs operate in three modes: normal, bypass and blocking. When the RAT is powering the aircraft’s hydraulic and electrical systems, the right elevator PCUs have no electrical and hydraulic power. Consequently, they will operate in blocking mode and the right elevator will be locked in position.
Amazing report. Highly informative. Thank you. I believe the older pilot sabotaged the flight but never 100 percent. Still interesting to read the detailed terminology used in the article.
@Parhiban: Welcome! The mystery is far from solved. Thanks for participating.
@Ge Rijn
It is probably a stretch to require an accident precedent that shows exactly the same kind of failures. The three cases I mentioned (SilkAir 185, Egypt 990, China 006) simply show that it is possible that vulnerable parts can detach during the descent and that there is a typological intersetion with the parts attributed to MH370 and relatively well preserved (wing parts, landing gear door, engine, empennage). As far as I am aware, there are very few cases of comparison with a similar crash profile and even the ones above do not compare completely: two cases result from a straight dive, the other from a momentary loss of control (at high altitude). In the descent scenario assumed here, the forces would have been more violent.
There is however, the case of the 1999 Learjet crash, assumed to be a ghost flight which spiralled out of control after the fuel was consumed. Interestingly, the accident report also mentions a separate debris field, although it leaves open the question which parts were found there or why there was a separate debris field:
“Additional wreckage was recovered up to 150 feet away. Almost all of the wreckage found outside of the crater was located east of the crater.” (p. 14)
https://www.ntsb.gov/investigations/AccidentReports/Reports/AAB0001.pdf
If this was not a high speed impact, then how do you explain #11, 16, 22, possibly 25 from the debris report (and the very small parts which are documented but have not “made it” onto the list)?
Victor commented, I don’t quite understand why this tendency to roll to the left under RAT power was never cited by Boeing or the ATSB.
ATSB, in their 3rd Dec 2015 update to the MH370 – Definition of Underwater Search Areas, did include this comment on end-of-flight simulations:
The aircraft behaviour after the engine flame-out(s) was tested in the Boeing engineering simulator. In each test case, the aircraft began turning to the left and remained in a banked turn. In many cases, but not all, a phugoid oscillation in pitch was observed. The final position of the aircraft was within a region defined by 10 NM forward and 10 NM left of the position where the flame-out occurred. Therefore, relative to the arc location, it was determined that 10 NM forward and 10 NM behind the arc would encompass the simulation impact area.
I assume Boeing ensured their engineering sim correctly models the left flaperon PCU behaviour, and that of all PFCS components, in the case of fuel exhaustion.
@Nederland
Yes comparison with MH370 is quite difficult for the other three flights you mention all endured a near Mach 1 vertical dive (also China 006) without losing trailing edge/wing related pieces during their dives while MH370 lost at least 11 (found) pieces only from this area of the plane.
The Learjet spiraled to the ground and was distroyed on impact. Probably with explosive force ejecting some debris ~50meters from the impact point?
Item no.11 the back seat trim panel is discribed as; ‘the part was intact with slight distortion’. Imo it’s hard to imagine it could have survived this way in a high speed dive impact.
Item no.16 the interior panel. This is a rather thin panel not build to withstand a lot of force. This kind of panels are the ones that seperate and break also during a crash landing like Asiana 214 (see the cabin pictures of that crash).
Item no.22 the vertical stabiliser piece. I think it could have seperated after the leading edge was hit by debris from the wing or engines during a ditch-like impact.
Item no.25. This was not identifiable coming from a B777. So this impossible to tell. If from a B777 it could come from many places on the plane.
The small pieces found by Blain Gibson look like pieces of interior panels to me. Here goes the same as with item.16 imo; no high speed impact necessary to cause this kind of damage on those light build interior panel structures.
@Victor
We’re in furious agreement about the outcome. If I’m missing the point it is because I had interpreted your sentence “If the position of the right flaperon is positioned slightly down compared to the left flaperon, the result would be a roll to the left.” as an indication that you believed that the right flaperon was likely to be re-positioned (ie moved) whereas it is the left flaperon that would move; it’s a semantical point. I had previously mentioned reading somewhere that with both PCUs in bypass aerodynamic forces are likely to cause an upward deflection of the left flaperon; that’s been confirmed by both Andrew and Don (complete with AMM reference).
@Ge Rijn
If debris from the Learjet crash ‘bounced back’ from the impact, then it would bounce back into random directions, but all debris was found in one line east of the impact zone (presumably the direction from where the plane came before impact).
Also, Egypt Air 990 did lose wing related pieces. (a flaperon can even come off during a normal landing, this happened, for example, in Frankfurt).
How would interior items like #11 experience distortion damage if the vulnerable parts, like wing parts, don’t? It surely couldn’t be from the one impact.
#25: “The internal laminate seems to be squashed” – obviously it was not simply hit by another item. And even in that case, the impact must have been violently enough surely to cause crush damage on the pieces that hit the water in this way and then “squashed” the stabiliser.
Ben Sandilands cover of this article:
https://blogs.crikey.com.au/planetalking/2017/06/05/mh370-may-lurched-left-plunge-impact/
@Ge Rijn
Comparisons to the control surface separation/damage (or lack thereof) associated with China Airlines Flight 006, EgyptAir Flight 990 and SilkAir Flight 185 are quite misleading as in all three of those cases we are looking at airplanes with fully functioning hydraulic systems which means that control surfaces were either dampened for flutter or locked out in response to excessive airspeed (in the case of EgyptAir 990 the high speed descent and initial pull up occured while the engines were still running at flight idle). MH370 is markedly different because we are looking at an airplane with only partial pressure to one hydraulic system which means that flaperons and ailerons were either completely or partially free to move in response to aerodynamic and other forces. Different scenarios, different outcomes.
Ge Rijn: My understanding is that the APU can power everything, including the IFE. Perhaps Andrew or Don can prvide a reference.
@Victor,
i am not sure how the flight simulator accounts speeds at M=1 and above and how accurate it is. From a mechanics of fluids point of view, it is extremely difficult to reach past M=1 even with engines on. The previous known incidents of exceedance of M=1 was only marginal M=1.01 and with thrust power (far from M=1.1). Here we are talking about a significant excedance with no thrust power. We may well be exceeding the validity limits of the simulator. Not sure also how it takes into account the drag force who will increase with air density increase approaching Alt=0 as the drag will eventually balance with the gravitational acceleration to achieve terminal velocity (do we know that that terminal velocity is above or below this?).
@Mick Gilbert
On your: “(in the case of EgyptAir 990 the high speed descent and initial pull up occured while the engines were still running at flight idle)”
According the report the switches to shut off both engines were pulled during the first ~30.000ft/min descent shutting off both engines within 6 seconds. Cabin lights went out. In this case there was a captain pulling the column trying to pull out of the first dive in which he succeeded.
In this first descent the plane reached near 700mph and stayed controlable cq. did not disintegrate for it climb back from ~16.000ft to ~24.000ft.
ChinaAir 006 dived from 41.000ft till 9.600ft in less than 2 1/2 minutes.
Also in this case the captain managed to pull out of the dive without the plane having parts seperating from the plane due to flutter or else.
The damage on the tail occured due the 5g overload stresses when the plane pulled out of the dive not by flutter.
SilkAir lost parts of its tail section during the dive that were found on land. No other controlsurface/wing related parts were found on land or drifting in the water. So also in this case non of the kind of pieces that were found related to MH370 seperated during the dive.
At least non that remained floating like the MH370 pieces.
In EA990 only 2 elevator pieces are mentioned to be found floating.
I argue with the arguments above that MH370 shows a quite different debris-pattern that did not occure in the high speed dives of the mentioned 3 cases.
In this regard I agree with you and others completely that MH370 is not comparable with this high speed dive incidents.
Like to add that the (imo) only positive comparison with EA990 and ChinaAir 006 to the BFO-messured EOF high descent rate of MH370 shows it’s possible to recover from very high rates of descent without losing (essential) wing related parts due to flutter or otherwise.
@Victor. Because the ATSB has made no mention of flaperon asymmetry as a roll contributor I have taken it that the AMM statement that RAT deployment will roll the aircraft left (ie implicitly of itself, no ‘because’) stems just from the RAT being on the right side: its impeller axis points downwards somewhat when deployed, its ‘drag’ then having an upthrust component, leading to left roll. So this is why I have treated flaperon asymmetry as additional to the ‘2-3 units of right control wheel’ needed to counter the RAT deployment effect.
All the same, despite this not being entirely clear I see others are confident that it is only flaperon imbalance which contributes to the roll; and that is the ATSB view. I remain unsure and in passing note that it took 4½ units on top of RAT deployment for your BFO-compatible descents, meaning that if your simulator was attributing 2-3 units for RAT deployment around twice that would have to be added from other asymmetries to realise those BFOs.
On your doubt that there would be much asymmetry during the first 2 mins, what you have done is to introduce via the control wheel and RAT deployment the asymmetry needed to reproduce the BFO descents from quick and very steep banking. If that asymmetry was there at 2 mins but not before, what suddenly applied it at the 2 mins?
@Don. With engine driven pumps ineffective at RAT deployment, flaperon asymmetry will apply then. It could be removed by 2 possible means; an APU start, that powering AC pumps, and/or engine windmill speed rising with IAS, that bringing the engine pumps back on line. With no information about the latter, what of those electric pumps? There are 4, each I think delivering 6 gpm. Two are the primary pumps of the centre system, delivering 12gpm between them. Stabiliser motors each use the 8gpm at rated speed. Suppose the stabiliser to be operating single path, below 230knots the motor would move at half speed ie 4 gpm. Above 230 knots (AMM) it would run at only a fifth, ie 1.6gpm. I am unsure that much stabiliser trim would be demanded or for long. Other demands should be small, so overall demand should not be a problem.
Below 22,000 ft the high-capacity air driven pumps could cut in too, depending on other demand for electrics and air (quite incidentally, for those seeking an incentive for a piloted nose down, cabin pressurisation with the aircraft higher than 22,000 ft will drop on loss of engines’ bleed air since the APU will not supply in their place).
What would sideline the APU’s relevance would be non-supply of air together with load shedding of electric pumps; though even with shedding it is unclear that would mean all 3 systems and both centre system pumps. However if this sidelining is what is behind the lack of recognition of the importance of APU runs to simulation veracity, it has been without any commentary to that effect.
@ALSM. I hope you can help with answers to this string of questions, though I realise that recording this type of data was not your purpose:
• You mentioned several quite different descent profiles, one entailing a high speed pull out. Of those that you judge were generally consistent with BFO descent, their acceleration and timings, what maximum straight line distance after the BFOs to crashing would you guess at please?
• Do you have an idea of the high speed pull out ‘g’?
• Do you think others would have had a spiral similar to that which Gysbreght analysed, resulting in about 6g?
• In any was there any nose down without steep bank, accounting for a rapid descent increase?
• While the simulations would not be valid when the descent was beyond the simulator database, do you think it likely that flutter boundaries were exceeded? (I might be able to guess your answer)
• Also, do you have an opinion as to why in your simulations you encountered APU runs where the Boeing simulator did not?
@Gysbreght. I for one would welcome your contribution to this discussion.
Nederland says:
“How would interior items like #11 experience distortion damage”…
Minor point of interest.
The ‘crush imprint’ on the ‘seat back video panel surround’ is very similar to the
‘broad curve’ that exists on the ‘overhead bin units’ (as seen e.g., in the top
left of this picture);
https://d31fjbthwxlyse.cloudfront.net/blogs.dir/10/files/2017/05/MH370-IFE-frame-e1493789620621.jpg
No need to reply. Cheers
@Ge Rijn
With regards to EgyptAir 990,
– the maximum negative rate of vertical acceleration was recorded at 01:50:14 (local time);
– the maximum positive rate of vertical acceleration was recorded at 01:50:23;
– the maximum airspeed was recorded at 01:50:30;
– the engine switches were moved to cut-off at 01:50:21-01:50:22 meaning that the engines ceased running at 01:50:27-01:50:28; and
– the airplane impacted the water at 01:50:38.5.
As you can see the major excursions occured while the engines were running and while there were some significant positive rates of vertical acceleration recorded after the engines stopped running we’re only looking at a 10-11 second period of time.
@Andrew
Thanks for explaining the right elevator is in blocked mode when only under RAT.
Do you know also in which mode the right wing aileron is under RAT?
I see it’s PCU’s are also not powered under RAT.
@Mick Gilbert
I think you missed the piece of the report that mentions what happened after 1:50:38:
Air Force
(USAF) radar sites indicated
that the airplaneís descent stopped about 0150:38 and that
the airplane subsequently climbed to about
25,000 feet msl and changed heading from 80∫
to 140∫ before it started a second descent, which continued until the
airplane impacted the ocean.
@Ge Rijn
You’re correct, I shouldn’t have said that the airplane impacted the water at 01:50:38.5, I should have said the FDR recording ceased at that time.
@Victor. About my paragraph 3 question I have taken it that your simulation was a virtual add-on to the almost 2mins before it which would be needed for the 7th arc log-on at 2 mins. Now as I read it for demo purposes you put aside log-on compatibility and in fact the aircraft hit the water well before it could log-on.
If that is so I rephrase that question to: what would cause such a rate and extent of banking which would not crash the aircraft before log-on?
Jeff Wise said: “To me, the real achievement of Victor’s latest post is the finding that the deployment of the RAT will itself cause the plane to roll if the autopilot is disconnected.”
Yes, the ATSB, in their 3rd Dec 2015 update to the MH370 – Definition of Underwater Search Areas, did include this comment on end-of-flight simulations:
“The aircraft behaviour after the engine flame-out(s) was tested in the Boeing engineering simulator. In each test case, the aircraft began turning to the left and remained in a banked turn.“
@ Ge Rijn
RE: “Do you know also in which mode the right wing aileron is under RAT? I see it’s PCU’s are also not powered under RAT.”
The aileron PCUs are different to the flaperon PCUs in that they have a blocking/damped mode in addition to the normal and bypass modes. If the RAT is operating, the right aileron’s inner PCU has hydraulic pressure from the centre system, but the associated ACE is unpowered. The outer PCU has no hydraulic pressure, but its ACE is powered. Consequently, both PCUs will be in blocking/damped mode. The PCU actuators are able to retract very slowly, but cannot extend, preventing upward movement of the aileron surface caused by aerodynamic lift.
RE: “@Paul Onions stated some days ago that the IFE would be power-shedded when only APU power is available. Can you can confirm this?”
The aircraft needs two AC power sources to supply the entire electrical system. If only one AC power source is available, ELMS will, if required, shed the following loads in sequence:
– Galley loads
– Utility buses
– Equipment cooling vent fan
– Galley chillers
– Recirculation fans
– Lavatory/galley fans
– Electronic seat equipment
– Hydraulic pumps.
The ‘head end’ IFE equipment is powered by the Right Utility bus, so it may be shed if load shedding occurs. The seat IFE equipment might also be shed.
@David said,”If that is so I rephrase that question to: what would cause such a rate and extent of banking which would not crash the aircraft before log-on?”
I don’t understand your question. The log-on request corresponded to the position at the 4000-fpm descent rate, which was adjusted to cross the 7th arc at that time. The log-on acknowledgement occurred 8 seconds later while still airborne.
If you are asking what caused the 2-minute delay in the banked descent, in the post, I offered (last paragraph before the conclusions) some possibilities.
The roll rate and roll direction are caused by geometric asymmetries combined with asymmetric surface positions, which are themselves a function of state of the hydraulic systems. If in Boeing simulations there was a change in the state of hydraulic systems (for an APU start, for instance), the roll rate would also change. In the simulation I presented, I tried to simplify all these effects into a single, steady simulation input which caused a fairly constant roll rate which caused descent rates which matched the BFO.
It is impossible to predict the trajectory of MH370 without a much more detailed understanding of the electrical and hydraulic systems and knowledge of the aircraft’s configuration before fuel exhaustion. I offered the simplest of possibilities.
@HB said, “i am not sure how the flight simulator accounts speeds at M=1 and above and how accurate it is.”
The FSX simulation is certainly not accurate at transonic speeds, as I cautioned. Nor do I believe that a Level D simulator would necessarily be accurate that far outside of the certified flight envelope. But with the assumptions in the simulation, whether the top speed was M=0.97 or M=1.1, the trajectory would still end with nearly vertical pitch and close to the 7th arc.
@Andrew
Thanks again. So also the right aileron won’t compensate the left flaperon upward movement.
And from your info on the APU/IFE question I conclude it was also possible the final IFE log-on could have failed because the plane was only on one AC power source (the APU) and the Utility buses and the Electronic seat equipment were then load-shedded.
I think this could mean the APU was still running and the plane was consequently still in the air at 0:21.
@Victor
I am trying to reconcile this article with three things:
(1) Brian Anderson’s earlier paper on the flight end, and
(2) my belief that a 32-34S end point meets BTO/BFO best,
(3) ATSB suggested search area 32-35S.
If your downwards trajectory is not exactly correct, and MH370 spun around 180 degrees and was heading northwest in the descent, then the aircraft could be inside Arc7, right? Also the final BFO = -2 could be closer to sea level.
You are saying the crash site is outside Arc7 and that area is already well searched (as JeffW points out). So you picked 30S for this example, which is problematic.
We need to ask if there is any way to put this aircraft in the unsearhced 32-35S zone inside Arc7? Of course, I have a new path proposal that the BFO/BTO could show the pilot descended to cloud level by 00:11. But at the moment the high altitude crash looks more consistent.
@TBill: If the scenario occurred as the simulation shows, the crash would have occurred within about 5 NM from the arc. This would mean the plane crashed further north along the arc than 32-35S, as this part of the arc was already searched to that distance. But the timing of the discovery of “Roy” in South Africa in Dec 2015, as well as the lack of debris discovered in Western Australia, already cast doubt on this part of the arc.
I think the evidence against a crash site in the vicinity of 30S is much weaker. I have little faith that the aerial search in this area was 100% effective, and the earlier arrival of debris along the shores of Eastern Africa from a crash at this latitude might not have been detected. The fact that Blaine Gibson found “No Step” relatively easily indicates to me that likely a lot of debris reached Eastern Africa earlier and was either not found, or was found and not reported. (I don’t subscribe to any theory that needs Blaine to have planted evidence. In fact, considering his demonstrated ability to make multiple finds, and considering the finds by others, I think any claims to this effect are far-fetched, to say the least.)
So, my best guess is the plane crashed close to the arc but further north than where the seabed search was conducted.
@Victor
I think my post above got lost a bit, but I would obviously be glad if you (or whoever wants) could have a look at this proposed/revised path ending around 31.1S(summary on p. 11-12):
http://docdro.id/GvlrLaV
…and maybe replicate at least the segment from BEBIM to YWKS to see if they get the same results (in which case I do think there is a likelihood that this was the path).
I appreciate this may be quite a bit of work, but I don’t think anyone has so far proposed this (other than some posters very early on pprune but without exact BFOs etc.).
Basically, I do agree with you.
@Nederland
I will try to run it on FS9 when I get a chance.
@TBill
Thanks, appreciate it!
@Nederland: Independent of what occurred before reaching BEBIM, I think the crossing of the 7th arc between BEBIM to YWKS is a very reasonable possibility.
@Victor
It’s also pretty much the area which the Chinese vessel Zhu Kezhen surveyed bathymetrically from 21 May to early October 2014. The GO Phoenix started to search there but was redirected to the southern area after a few days. The surface search in this area lasted only from 28 March to 3 April 2014.
I don’t have much experience with flight path reconstruction, so I’d be glad if the path can be double checked.
@Nederland
I read your extensive paper (what an amount of dedicated work..:).
Although I’m probably not the first you hoped to get a reaction from I’ll give you a comment.
First your assumption the pilot flew the whole route on existing waypoints (that were in the planes database) with Wilkinson Runway as a final waypoint. I think this could be true.
But I think when a deliberate action from the pilot, with avoiding Indonesian radar this way and reaching his end destination, is a bit too complicated and unrealistic.
I think he would opt for a more simple route well outside Indonesian radar coverage to be sure. Not passing it in- or at the edge which would give him away not by risk of scrambling but by risk of detection.
This he could do by flying from MEKAR over NILAM and IGOGU towards DOTEN in a straight line making the FMT somewhere before DOTEN.
The extra time needed to reach this spot not too far before DOTEN would allow him to avoid Indonesian radar comfortably and with no need to program other waypoints than only YWKS or other manualy programmed coördinates he chose for his end destination.
If true this would also be more or less in line with the recovered SIM-points on the simulator.
His first plan could have been McMurdo as a final waypoint but the Beying flight could have forced him to change this to Wilkinson Runway.
The ~31S appeals to me for it’s very near Broken Ridge with its deep rough trenches.
I still think the obejective was to ditch and sink the plane there somewhere in one of those +5000 meter trenches.
@victor
Your conclusion about bfo data consistency with high rate of descent with this scenario is hard to visualise. Also the timing seq wrt to those data is hard to see. Could these be compared with the trajectory in graph format or table format?
As the plane was not found in this area, just from the data analysis point of view, does that mean something is wrong with the data or any other possible scenario that can match the data eg plane piloted, ditch or lighter/smaller drag type airplane or the search missed it?
Why should I not hope you’re the first to comment?
As to underlying theory, I have no idea really what happened, but I think roughly the first half of the flight may have been a sophisticated plan to land somewhere else, and then another event occurred – but it doesn’t matter really.
I also have no clear idea how the exact flight path looks like before BEBIM (or ISBIX). I think TBill also found that the proposed NIXUL – UPROB path works well with the 19:41 BFO and ISBIX – whatever happened before I don’t know, it’s just an example path.
I also think any flight path needs to work with the BFOs and that is quite difficult to do.
To me, a 6 hours or so suicide flight, straight with no further waypoint or other route changes, seems odd, regardless of what one thinks was the purpose or reason for the flight or the initial diversion. My contention is that these (ISBIX, BEBIM) or the only waypoints that work with the DCL. At the end of the day, the assumption of just one FMT and then a straight path south has not so far worked, so here is a different approach.
@Ge Rijn
Also, you wrote:
“The extra time needed to reach this spot not too far before DOTEN would allow him to avoid Indonesian radar comfortably and with no need to program other waypoints than only YWKS or other manualy programmed coördinates he chose for his end destination.”
I think this is not true. In order to reconstruct a flight path like the one you propose, MH370 would definitely have to return to Sabang radar range (according to the ping rings and also BFOs). I have quite carefully explored different options. Then the question is why avoid Indonesian airspace in the first place?
@HB:
“Your conclusion about bfo data consistency with high rate of descent with this scenario is hard to visualise. Also the timing seq wrt to those data is hard to see. Could these be compared with the trajectory in graph format or table format?”
I have supplied an HD video of the cockpit where the PFD and MFD can be clearly seen. The groundspeed, track, vertical speed, and timing can be checked if you doubt consistency with the BFO data.
“As the plane was not found in this area, just from the data analysis point of view, does that mean something is wrong with the data or any other possible scenario that can match the data eg plane piloted, ditch or lighter/smaller drag type airplane or the search missed it?”
I believe the search was too far south. I explained this above.
@nederland
I looked at your paper. You have made similar (but not the same) assumptions that I made in some far less competent work that I did a long time ago. I discussed this with Victor privately at the time. The endpoint I came to was at approximately the same location as the one you identify although for different reasons. I still think this is the most likely impact point. It is good to see another rationale indicating a similar result.
@Ulric
Glad to hear. I think there is no objectivity in research like this, but if more than one researcher independently come to similar conclusions, there is some objectivity.
The ATSB have also proposed a very similar impact point on 28 March 2014 (although they don’t seem to have considered a route including ISBIX – BEBIM):
https://s3-ap-southeast-2.amazonaws.com/asset.amsa.gov.au/MH370%20Day%2011/Charts/Charts2/2014_03_28_cumulative_search_handout.pdf
I’d be interested to read your proposal if there is any online or if you have files, Victor should have my email address.
@nederland
In the present, there are many reasons to doubt my assumptions. They are supported only by deductive reasoning rather than calculation and were reasonable at the time they were made. Victor did publish a paper considering a similar logical scenario (for the early flight path) to mine which proposed a very different endpoint. If you have read his papers then you will have seen it. The uncertainties in those early discussions mean that many things have been superseded by subsequent facts. I don’t want to muddy any waters now by resurrecting discussions which were done to death years ago.
@Nederland
I think a route like I proposed could fit the 19:41 BTO/BFO’s less complicated when messing a bit with the FMT, altitudes and speeds before 19:41.
When you count the time and distance between Penang and MEKAR and after this from MEKAR near DOTEN with an FMT not far before DOTEN till the 19:41 Arc at around the same speed you’ll find it will match without another waypoint necessary than an end waypoint.
Avoiding Indonesian airspace cq. radar in case of a deliberate act of disappearance would make good sence for not being scrambled or detected.
If detected that night by Indonesian radar after FMT the planes heading would have been quite clear from the start.
@Ge Rijn
I have just tried it on google earth and a great circle route from DOTEN (or close to it) to Wilkins Runway does nowhere nearly match the other rings I’m afraid (the second and third being of particular concern).
There is no way MH370 could have been detected by Sabang radar in the route I propose. This is because the BFO at 18:40 means that MH370 was descending (unless it was flying south, which has now been excluded). If MH370 was maintaining that rate of descent it would have been out of sight by the time it turned to the south (this could also be a rationale to explain the descent at that time).
I explain this in greater detail on p. 7.
On the other hand, the northern path around Sumatra is very much speculation only. If Wilkins was the end of route point, that would very much narrow down the crash area; if BEBIM was the penultimate waypoint, that should nail it, unless I have made a mistake.
I haven’t done fuel calculations, though. I figure this is nearly impossible as the exact altitude during the proposed route around Sumatra is unknown.
Ge Rijn:
Andrew:
Re IFE
As I understand Andrew’s description of the APU power and “load shedding”, the power for the IFE could have been shed *if necessary*, but that does not mean it was definitely shed. It is apparent that ATSB and Boeing do not think that was the case. From the Dec 3, 2014 ATSB Underwater Search definition, page 10:
The fact that the expected IFE system transmission was not received could be due to:
• the IFE system being selected off from the cockpit overhead panel at some point after the 18:25 logon
• the IFE and/or SDU unit losing power (APU flame-out), or
• the IFE and/or SDU becoming inoperative (due to impact with the water) before the connections could be set up, or
• an unusual aircraft attitude breaking the line-of-sight to the satellite (aircraft transmission not received by satellite).
@ROB,
@Paul Onions,
@Paul Smithson,
I have not ignored or forgotten your comments and questions regarding the feasibility of reaching 38S based on available fuel. It is indeed troubling that, to the best of my knowledge, all independent, detailed fuel models have indicated a maximum range shorter than what the earlier ATSB graphics seemed to indicate. This includes my results and those by VictorI and sk999 (gentlemen, please correct me if I have misstated your results).
I am doing a new and independent analysis based on simply extending the MH370 Flight Brief at a constant Flight Level to answer the following questions:
1. How far south along the 7th Arc could MH370 have flown? This is based on the Flight Plan at CI = 52 and then scaled to CI = 0 (Maximum-Range Cruise). It also assumes the earliest possible FMT and the most direct route to the 7th Arc.
2. When would MH370 run out of fuel if ECON mode was used after 18:28? I will present endurance estimates for a range of Cost Indices.
I will post this work as soon as it is completed.
@DrB: We look forward to seeing your results when you are ready to share them.
Thanks Dr B. As I understand it, this is precisely what ATSB did with Boeing input: MRC “performance boundary” [distance] from 1828 turn (but with altitude unstated and assumptions on speed/altitude between 1720 and 1828 unstated. I will be interested to see how they compare.
@Nederland. You said “There is no way MH370 could have been detected by Sabang radar in the route I propose.” Have you quantified radar horizon from Sabang by aircraft altitude? I haven’t done this calculation but I would expect nominal range to be close to 200NM at any “reasonable” altitude – and would therefore expect your path (and others like it) to be detectable by radar. Could you please post your calculated altitude for radar horizon from Sabang?
The other thing that I do not understand is this: why all the fuss about skirting around Sabang radar detection zone having just flown straight through the visible range of at least 3 other Indonesian civil & military radars?
@Paul
“Thanks Dr B. As I understand it, this is precisely what ATSB did with Boeing input: MRC “performance boundary” [distance] from 1828 turn (but with altitude unstated and assumptions on speed/altitude between 1720 and 1828 unstated. I will be interested to see how they compare.”
Boeing has been a part of the SSWG and advising the ATSB from the very beginning. My inclination is to believe that they modeled both the fuel range and the end of flight scenarios better than any of us could hope to do. If DrB comes up with a number that shows 38S is not possible, who are you going to believe?
@DennisW,
Not every “inclination to believe” turns out to be correct. It’s too bad ATSB/Boeing will not provide specific details of the fuel and range modeling they did. My new results are not based in a significant way on any fuel modeling I have done. They are based on the MH370 Flight Plan prepared by MAS. Maybe you should consider believing Malaysia Airlines can compute the fuel usage and range of their own aircraft using Boeing-supplied fuel models.
@Victor. “I don’t understand your question.”
On looking at it again my problem was that at t=0 you have fuel exhaustion and wind on the control wheel. I assume the video has the same time datum. The aircraft crashes a little over a minute later, which would be before the log-on, which occurred 2 mins after f.e.
Previously I had assumed you started the video at almost 2 mins, ie the log-on coming shortly after…. But I repeat myself.
No matter. Not of great consequence.
That led to puzzlement about how asymmetry would not have thrown the aircraftcould apply suwhy, with you would suppose that asymmetry which caused the sharp and exc tensive bfrom RATif theer had beeEither way I was trying to reconcile how the aircraft suddenly banked atwhen, if there had been asyymetry then there would have been over the previous almost-2-mins which since fethe aircraft flew without banking unabking
@Victor. Delete the last para please. Mind clearing.
@David said, “I was trying to reconcile how the aircraft suddenly banked atwhen, if there had been asyymetry then there would have been over the previous almost-2-mins which since fethe aircraft flew without banking unabking”
Even though you withdrew that paragraph, there is still the question of why the RAT was operating for two minutes before the roll to the left from the flaperon asymmetry.
After fuel exhaustion, we would expect the pressure to the left and right hydraulic systems to decay over some period of time, as determined by the consumption of hydraulic fluid by various systems, and also determined by the limited flow that is available as the engines windmill below idle speed and the engine-driven pumps operate at reduced capacity. Since the flight controls are in “secondary” mode, and there are assumed to be no pilot inputs, the flow demand from the actuators might be sufficiently low so that the engine-driven pumps can maintain a slow decay of hydraulic pressure. Due to this slow decay, it might take 2 minutes before the left flaperon operates in “bypassed” mode and it floats up to its free position.
@Victor
Just out of curiosity, was there any reason that you used the PMDG 777-200LR sim on Microsoft Flight Simulator X for this exercise over the PSS Boeing 777-200LR sim on FS9?
@Paul
It’s basically all in my file ( http://docdro.id/GvlrLaV )
I haven’t done calculations on Sabang radar range on my own, but I have reproduced the spread sheet provided by Duncan Steel on p. 7 of the document above. I have also provided an estimate of the altitude, which means that I don’t think Sabang was able to spot MH370 on the proposed route.
“The other thing that I do not understand is this: why all the fuss about skirting around Sabang radar detection zone having just flown straight through the visible range of at least 3 other Indonesian civil & military radars?”
I have provided the rationale for this on p. 6, including sources in the public domain. Basically, Indonesia said that they might have spotted MH370 but not in own airspace. Inevitably, MH370 had been spotted on the route attested in the FI by neighbouring countries. But it had only been spotted flying through Malaysian airspace, and so there was no reason for any neighbouring military to follow up on this or scramble interceptors, they basically saw a blip, probably civilian, passing through Malaysian airspace, why bother? (and Malaysia did not notify an aircraft was gone missing/might have gone rouge.)
@Mick Gilbert: The PMDG 777 model is newer, more complete, more accurate, and is supported by PMDG. I’m also much more familiar with it. I have only used the PSS 777 model to replicate the recovered simulation data from the captain’s MK25 drive.
@Victor
Thank you for that clarification, Victor.
@Victor. Thanks. So with a slow hydraulic pressure decay the RAT deployment could be delayed quite some time and in the meantime there would be no flaperon asymmetry.
In the video as you point out the RAT deploys after 14 secs, so apparently the simulator reckons the pressure decays just those secs after f.e. Andrew and ALSM may be able to comment from their simulations. With the log on being say 15 secs after RAT deployment that would mean its deployment was delayed to 1:45 after f.e.
Quite a while, though an interesting thought.
However in your simulation the RAT deployment is with the aircraft rolled and rolling under the 4½ units of control wheel you have entered, the RAT adding just a little more asymmetry later. What I was trying to get a handle on is what could have led to those 4½ units’ worth of asymmetry at that point which would not have caused the aircraft to crash much earlier, well before the RAT even deployed.
However it remains more a comment and a curiosity than of consequence so it might be best to leave it there.
@David
@Victor
RE: “After fuel exhaustion, we would expect the pressure to the left and right hydraulic systems to decay over some period of time, as determined by the consumption of hydraulic fluid by various systems, and also determined by the limited flow that is available as the engines windmill below idle speed and the engine-driven pumps operate at reduced capacity. Since the flight controls are in “secondary” mode, and there are assumed to be no pilot inputs, the flow demand from the actuators might be sufficiently low so that the engine-driven pumps can maintain a slow decay of hydraulic pressure. Due to this slow decay, it might take 2 minutes before the left flaperon operates in “bypassed” mode and it floats up to its free position.”
Adding to Victor’s comments, there are also accumulators that would have helped maintain pressure in all three hydraulic systems after both engines flamed out. The length of time would obviously depend on the system demands, as Victor said. Additionally, the three power supply assemblies (PSA) that power the PFCs & ACEs all have backup batteries that are designed to maintain power to the PSAs for up to a minute during power switching. With electrical power and hydraulic pressure available, all the flight control PCUs might have remained in normal mode for up to a minute after the second engine flamed out if the system demands were limited. The aircraft might therefore have maintained reasonably straight flight until the flight control DC batteries depleted and the affected PCUs reverted to bypass or blocked/damping mode.
In the meantime, if the APU auto-started as the ATSB believes, its generator should have begun producing power after about one minute, restoring AC power and hydraulic pressure via the AC pumps. The aircraft flight controls might only have been powered by the RAT for a very short time until the APU generator started producing power. “Normal” flight control operation (albeit in secondary mode) would then have continued until the APU flamed out, at which time the RAT would have been the only source of power. The aircraft would then have commenced its terminal rolling dive.
@David: No, that’s not what I meant. I perhaps should have been more clear about the timeline, which isn’t matched in the video. Here is a summary:
The RAT deploys when both AC transfer busses lose power, providing critical electrical power and hydraulic pressure to the center hydraulic system. The RAT deployment would occur just after the second engine flames out, regardless of the pressure in the hydraulic systems. I believe the off-centerline drag from the RAT would cause little if any yaw or bank moments, and can be ignored. The force and moment arms are too small.
For a period of two minutes after the second engine flames out, the pressure in the right and left hydraulic systems decay. The decay is made more gradual by the engine-driven pumps that provide some flow, and the low demand of the actuators while in “secondary” control mode with no pilot input.
After about two minutes, the pressure has decayed sufficiently in the right and left hydraulic systems so that the left flaperon floats up while the right flaperon, fed by the center hydraulic RAT pump, remains fixed in position, creating the lateral asymmetry that starts a roll to the left. The tendency to roll to the left could be balanced with pilot input if the control wheel were rotated 2 – 3 units to the right. In the simulation, with no pilot input and no flaperon asymmetry, the effect of the flaperon asymmetry is created by artificially rotating the control wheel to the left.
Impact occurs within a minute after the left flaperon floats free.
@David
RE: “In the video as you point out the RAT deploys after 14 secs, so apparently the simulator reckons the pressure decays just those secs after”
There are three conditions that will cause the RAT to extend in flight:
– both engines are below idle RPM and the centre hydraulic system pressure is low, or
– all three hydraulic system pressures are low, or
– both transfer buses lose power for 15 seconds.
If hydraulic pressure was maintained by the windmilling engines and accumulators, it’s likely the third condition would trigger the RAT to extend.
@Andrew: I like your summary. One issue that remains is if the two BFO values were caused by a steep descent, which was in turn caused by the left flaperon floating up under RAT power, what provided power to the SATCOM for the log-on? Is it possible that the internal DC bus(es) in the SATCOM had sufficient capacitance to allow it to continue to operate for a short period of time (less than a minute) after the APU shutdown? The two log-on bursts were short and did not drain much energy.
Victor: The holdup time for the SDU is <1second. It is intended to maintain operation through a switching transient, nothing more.
@Victor
Ah yes, that’s a problem. I don’t know if there would be enough capacitance within the SATCOM to allow it to continue operating for that length of time. I’ll have a think!
@Andrew, Victor. Even at a minute, the APU taking over before the RAT asymmetry has had much chance to act is new to me thanks.
On the PCU/ACE side the PMGs might have kept going too (if not the backup generators), sustaining them beyond the backup batteries’ 1 minute.
I note any run down time to idle after f.e. would affect both RAT deployment and APU start equally.
@Andrew. Your last sentence provides an insight into some Boeing simulator outcomes but lifts APU run time as an uncertainty with even more ramifications given the roll effect when it fails.
As an aside, I amongst others was interested in your confirmation that IFE COULD be shed if just the APU were providing AC – which I take it extends to any singular 120 kW source, IDG included – and whether that could be a factor in weighing 18:25 electrical configuration possibilities.
@Victor. Much clearer. Thank you for sticking with it, which has proved most worthwhile. However while your simulation could not include the APU, doing that clearly is central to the outcome, there being no appreciable flaperon asymmetry until the APU fails. It shows how important getting that APU somehow into simulations is, including yours. “…..the effect of the flaperon asymmetry is created by artificially rotating the control wheel to the left”. No need for control wheel input before the 2 BFOs, both nominally APU powered?
I frown at the ATSB statement, that implies at least that the APU was not replicated in the Boeing simulations, and wonder at the effect it had in ALSM’s.
Victor/Andrew: According to the MCS-4200/7200 manual, the SDU hold up time is 200 milliseconds. However, the RF circuitry is disabled after a 5 millisecond interruption. Page 23-20-35 states:
“The power-on self-test (POST) is a series of functional tests for individual
LRUs; each MCS LRU performs its own internal POST upon a cold start. A
cold start is defined as the response of an LRU where no retention of any
previously stored information in any volatile memory is assumed. The power
supply provides signals to help an orderly power-down and power-up
process for the LRU during power interrupts of any length. Primary power
interrupts of less than 5 milliseconds duration have no effect on system
operation. For primary power interrupts longer than 5 milliseconds and up to
200 milliseconds duration, the LRU maintains normal operation, except the
RF transmit and receive processes do not need to be supported in any LRU
during this interval. For primary power interrupts greater than 200
milliseconds duration that causes normal operation to cease, the LRU
performs a cold start following restoration of primary power.”
@Mick
As Victor said the PMDG 777 is the most rigorous 777 model for Microsoft Flight Sim today. The PSS777 is old and out-dated, and gets credit for historically being one of the first semi-realistic models. I use since Z used it and I wanted to see that perspective. PSS777 only works on the older FS9 (2004) software, so if you are using the latest and last version Microsoft FSX, PSS777 cannot be used although some tried to make work.
David: The APU was present in all our Level D simulations. It behaved as described by Boeing/ATSB. It started in 60-90 seconds after FE in all sim’s.
@Andrew, Victor. My 10:51 responded to yours prior to 08:49.
About RAT deployment after, “both transfer buses lose power for 15 seconds”.
Andrew do you whether the backup generators drop out at idle? I think it has come up before but has been left unanwsered.
Victor, You ask Andrew, “what provided power to the SATCOM for the log-on?” In all my comments on your simulation I have supposed that you left out the APU aerodynamic effects like Boeing because the APU run could not be modelled; but like the ATSB, not its SDU powering. Should you have prevented the APU from starting to exclude it totally I was not alert to that.
@ALSM. Just read yours thanks.
What I was working from is the ATSB’s, “Specifically, flight simulators are unable to accurately model the dynamics of the aircraft’s fuel tanks. In the simulator, when the fuel tank is empty, zero fuel is available to all systems fed from the tank. However, in a real aircraft, various aircraft attitudes may result in unusable fuel (usually below engine/APU inlets) becoming available to the fuel inlets for the APU/engines. If this resulted
in APU start-up, it would re-energise the AC buses and some hydraulic systems. This could affect the trajectory of the aircraft. Similarly, the left and right engines may also briefly restart, affecting the trajectory”.
That to me seems inconsistent with your, “The APU was present in all our Level D simulations. It behaved as described by Boeing/ATSB”.
Can you explain that please?
@Victor,
Not disputing the conclusion, just to put all the parameters in the same timeline. if i understand well the simulation timeline is as below for the BFO matching points:
Sim time , Actual Time, Rate of descent. BFO value, BTO value
T= 0.15s , 00:19:29 , 4000 fpm, 182 Hz, none available
T=~0.24s , 00:19:37 , 14400 fpm, -2 Hz, none available
So effectively this scenario would match these two data points. what i wanted to check is how close those points are to see if extrapolation is reasonable or not. It is like fitting a line to two data points closed to each other. As this data points are closed to each other, the obvious question is what other scenario could match these.
I also just noted, sorry i am not familiar with the BFO data itself and how the corresponding descent rates were derived, but what is hard to see in the paper is whether the correlation 4000 fpm to 182 Hz and 11400 fpm to -2Hz is fixed with time or not. Maybe i am wrong, I would assume both heading and descent rate would have an impact on the doppler effect and the fpm to BFO correlation should vary with time in this simulatione or maybe this is not a sensitive element or this is already accounted in the derivation.
More light on this would be appreciated.
@DrB
Thank you for your reply iro the maximum possible range on the night in question. For the record, my previous work was based on a FMT at IGOGU ( no offset) with a time at mid turn of 18:37:15 working out at.
I would be grateful if you could possibly also run a fuel calc for constant M0.81 at FL34/FL35, following FMT. My earlier work had pointed to constant M0.81, when allowing for the varying windspeed/directions and air temperatures at FL340, and satisfying the required arc crossing locations and times. I accept that constant M0.81 would logically, not be expected to achieve the same distance as MRC/LRC but interestingly (to me) I note that M0.81 appears to quite close to the average speed expected for a MRC flight at FL350, following FMT.
@ALSM
Thanks for the SATCOM information – given the short hold-up time, it seems the APU must have been powering the SDU during the log-on process.
Regarding the IFE, my tech guru tells me the IFE head end components are not powered by the Utility bus after all. They are powered by the L & R Sec 1 & 2 AC buses, which are not load shed by ELMS.
@Victor
@David
Regarding my previous comments, one possibility is that the residual pressure in the hydraulic system might have decayed before the APU generator came on line, leaving the RAT as the only source of hydraulic power. If that occurred, the aircraft would have commenced rolling before the APU started providing power. If the RAT was the sole source of hydraulic pressure for about 15 seconds (say) before the APU generator began powering the hydraulic pumps, the aircraft would have reached an angle of bank of about 54 degrees, assuming Victor’s roll rate of 3.6 deg/sec. The nose would have started to drop, increasing the rate of descent.
Once the APU began providing power, the left flaperon should have returned to the neutral position. However, by that time, the aircraft would have been in a steep descending turn. Depending on the aircraft’s spiral stability, the angle of bank might have kept on increasing, along with the rate of descent.
With a nose low attitude and steep angle of bank, it’s likely the APU only ran for a short time, long enough to for the log-on request and acknowledgement, but then flamed out soon after. The RAT would once again have become the sole source of hydraulic pressure, further exacerbating the aircraft’s rolling motion.
Victor, do you know if the PMDG 777 model accurately simulates the APU auto-start after a dual engine failure, assuming there is fuel available? If so, would it be worth repeating the exercise with fuel in the tanks to check the aircraft’s behaviour with the APU available? You could then reduce the fuel to zero or otherwise fail the APU to see what happens after the APU flames out. It might not be accurate of course, but it could prove interesting.
RE: ” Andrew do you [know] whether the backup generators drop out at idle?
They should operate at idle RPM, but would drop out as soon as the RPM dropped below idle.
@Andrew, @David: In the PMDG model, the APU does autostart after engine fuel exhaustion at the correct time with some fuel left in the tank. However, the effect of the RAT and APU on the flaperon position is beyond what the software can model.
I can try some simulations in which I add and remove the control wheel rotation to simulate first RAT-only hydraulics and then the APU autostart.
@Victor
@Andrew
Do we have an estimate as to how much fuel would have been left in the right tanks below the right engine fuel inlet when the right engine flamed out? Would the left bank and nose down attitude do anything in terms of making that residual fuel available to the right engine fuel inlet?
The right engine relighting, even momentarily, would certainly give that descending left spiral a tickle up.
@Andrew
IFE can be load shed by ELMS.
Load Shedding Operation.
The first load listed will shed first.
The other loads will be shed in the sequence shown until the required bus load level is achieved.
1. Door 4L Galley GLR
2. Door 4R Galley GLR
3. Door 2 Galley GLR
4. Door 1 Galley GLR
5. L AC Utility bus
6. R AC Utility bus
7. E/E cooling vent fan ELCU
8. Door 4L Galley ELCU
9. Door 4R Galley ELCU
10. Door 2 Galley ELCU
11. Door 1 Galley ELCU
12. L Lower & Fwd Upper Recirc fans
13. R Lower & Aft Upper Recirc fans
14. L Lav/Galley fan
15. R Lav/Galley fan
16. C2 Hydraulic pump ELCU
17. L Hydraulic pump ELCU (on ground only)
18. IFE Equipment (P110)
19. IFE Equipment (P210)
@Paul Onions
The Aircraft Maintenance Manual shows the IFE equipment mentioned in your list as ‘Electronic seat equjpment’. There is no other mention of IFE equipment in the load shedding sequence in the AMM. I originally thought the IFE ‘head end’ equipment was powered by the R Utility bus and would be load shed with the Utility buses, but I am reliably informed that the head end equipment is powered by the L & R Sec 1 & 2 buses and is not load shed.
@HB
If you Google “MH370 BFO error” you find a link to FFYap paper below. There is a link in the references to his spreadsheet for the BFO calcs. So you easily can play with the variables and see what matters as far as time, location, speed, descent, heading.
As you get out to the crash distance, far away from the satellite, the climb/descent variable tends to a strong factor. The problem with that I think is that heading is not so clear so that perhaps explains why its hard to find. The thing I wonder if rotational roll speed of the aircraft could impact BFO.
http://www.duncansteel.com/archives/1366
Mick, David
The fuel boost pumps are located symmetrically on each wing, two on each wing, a fore and an aft pump. On each wing, these pumps feed the engine manifold.
The APU DC pump installation is only on the left wing.
The fore and aft nomenclature refers to the location of the uptake for the fuel boost pumps. The uptakes, and that for the APU DC pump, are located within the tanks, parallel to the wing ‘ribs’, roughly inline with the main landing gear. The pumps are mounted on the rear tank/wing torsion box spar with the uptake pipes routed into the tank.
This image should give you some idea of the “well” of the tank at the wing root. The grey box mounted on the face of the rear spar, partially obscured by the brace strut, is the cover for the aft boost pump (the fwd boost pump is mounted further outboard). This video clip may also be useful to see the “well” of the tank in the wing root. The two black fittings, aligned one above the other on the rear spar, are the fwd and aft crossfeed valve actuators.
If the wings were level at fuel exhaustion, I expect that lateral roll in either direction would not permit the boost pumps to scavenge.
The uptake for the APU pump must be set lower in the “well” of the tank to perform as described in the AMM and permit further “scavenging” beyond the capability of the boost pumps.
:Don
TBill commented “ I wonder if rotational roll speed of the aircraft could impact BFO.
I wondered that too, actually I was more interested whether pitch rate would be reflected in the measured BFO (the satcom antenna are aft of the CG, whereas the ADIRS is forward in the MEC). Victor answered that it would not be a significant contributor.
:Don
TBill:
The vertical speed has the greatest contribution to the BFO value at the sub satellite point, and nearly zero contribution at the horizon (viewed from the s/c). At the 7th arc, the vertical signal is a very strong compared to the weak horizontal signal. See the following graphics for details: https://goo.gl/w4NB7c
@ALSM
Nice plots thank you. Minimum at 180S speaks to me, but I will probably try some paths which turn to 90East to see if I get any insights.
@TBill
TBill commented “ I wonder if rotational roll speed of the aircraft could impact BFO.
Turn rate definitely impacts BFO because the inertial reference system has a finite update rate, and the measured and reported track angle will always lag the actual track angle during a turn. I wrote a short paper on the error magnitude on my website some time ago.
http://tmex1.blogspot.com/2015/09/bfo-errors-again-note-original-post.html
@TBill
Note:
In my linked reference I was casual in the use of “heading”. I should have used “track angle”. Gysbreght had not beaten me up over it at the time, but I am sensitive to it now.
@DennisW
Very nice paper as I am finally able to appreciate it.
OK “Track” it is.
Although I appreciate your paper it is to soon for me know how to apply it to the current discussion. >>Can we just throw out the last two 00:19 BFO and say we just don’t know what maneuvers were going on? Keep in mind, if we have a live pilot assumption, then we have the license to envision end flight maneuvers: cut backs, belly flops etc.
Doesn’t sound like it of course, the experts seem to say it is high altitude descent as shown by Victor. That seems to say ghost flight at least at the end, or a non-ghost flight with a completely inactive pilot.
@TBill said, “That seems to say ghost flight at least at the end, or a non-ghost flight with a completely inactive pilot.”
To be clear, with only the last two BFO values, you can’t distinguish between (1) A high speed descent initiated by a nose-down pilot input. (2) A steep descent followed by a long glide, all from pilot input. (3) A banked, steep descent with no pilot input. I only discussed case (3), but (1) and (2) are also possible based on the BFO values.
@TBill
I am inclined to join the majority view that a rapid descent produced the 00:19 BFO values. Can’t know if that descent continued to sea surface or not, but it seems likely.
DennisW: When you put it all together…0019 BFOs, absent 0021 IFE login, level D (and Victor’s) sim’s, historical high descent rate data from other crashes, Russian paper on max distance from upsets, the size of the 2 dozen+ debris fragments, flaperon evidence of inflight separation, plus the lack of any evidence whatsoever that there was a long glide (only pure speculation), it is clear the descent continued, and probably continued to accelerate downward.
@Paul Onions. Your shedding schedule. It looks detailed. Do you have a reference as to its source?
DennisW,
Interesting point r.e. difference between track angle used to compute Doppler compensation and actual instantaneous track angle. However, given that all the calculations in the avionics of track angle are done using Kalman filters (which project forward in time), I do not see how the reported angle will lag the actual angle. At the most, there will be some error due to imperfect projection. From literature searches (e.g., Laseref VI manual), track errors are typically 0.1 deg (2-sigma). The SDU might introduce a lag. However, the SDU receives track info from AIMS at a minimum rate of 55 msec per sample. Thus, if the aircraft were in a 1.5 deg per sec turn (which I experienced once in a plane, which did a complete 360 degree turn at cruise altitude), the maximum lag in track angle would again be less than 0.1 deg. So I might see a contribution to the BFO of 1 hz, maybe 2 hz at the outside, from errors in track angle.
@sk999
I thought a “standard rate” turn in a commercial aircraft was 3 degrees per second.
I looked for the update rate, but was not able to find it. I also assumed that the track angle produced at each sample was perfectly accurate. However, since the SDU transmissions are not synchronized with the update rate (or else BTO errors would be huge) the track angle used by the SDU could be up to 55ms behind the actual track angle. .055*3 = .165 degrees. That would make the BFO error from this source less than 2Hz for a standard rate turn at 800km/hr.
Is this not a correct way to look at it? Including another 0.05 degree track error (your one sigma value above) could bring the BFO error associated with this issue up to slightly more than 2Hz for a standard rate turn.
@ALSM
Yes, we are on the same page with respect to events at 00:19.
DennisW,
3 deg/sec (standard turn rate) is typical for when you are at lower speed/altitude and in a hold pattern. At cruise speed (say, 470 knots) you would need one heck of a bank angle (52 degrees) to achieve that. A half-standard turn (1.5 deg/sec) needs a more modest 33 deg bank angle.
@Andrew. Thanks for your response on Backup generator drop out and the update on RAT influence.
@Mick, Don. Mick’s, “Would the left bank and nose down attitude do anything in terms of making that residual fuel available to the right engine fuel inlet?”
Besides the two boost pump suctions and on the left side that for the APU fuel pump, on each side there is a gravity suction (“fuel suction bypass”) located chordwise half way between those for the two boost pumps (AMM).
With the boost pumps dead, as any right tank residual fuel sloshed about the right engine might get some through that. Having read up about the RR igniters a while back, automatic relight being different to the GE, I am unsure of igntion, but the ATSB does say (my 12:36am above), “Similarly, the left and right engines may also briefly restart, affecting the trajectory”.
@sk999
The error is small in any case. When I started the exercise I simply had no idea what it might be. Obviously if there is no turn rate at the SDU transmission time, there is no contribution from this issue.
As far as TBill’s original question relative to what BFO error might result from roll, I think it is simply a function of the antenna velocity on the surface of the aircraft.
@Mick Gilbert
@David
@Victor
The following diagrams show the left wing fuel tank layout, the location of the boost pumps and APU DC fuel pump, and their respective inlets. The right wing is similar, but there is no APU DC fuel pump.
B777 Fuel Storage
B777 Fuel Feed
The red line at Rib 8 is the wall between the left main tank and the centre tank. The Aft Boost Pump and APU DC Fuel Pump are both mounted on the rear spar, inside the centre tank. Their respective fuel inlets are located next to each other, inside the left main tank. I’m told the APU DC Fuel Pump inlet is located lower in the tank, which explains why it is able to supply fuel for a short time after the Aft Boost Pump runs dry, as Don suggested.
The following diagram shows the APU fuel feed:
B777 APU Fuel Feed
The APU normally receives fuel from the left engine feed manifold, pressurised by the AC boost pumps. If there is low pressure in the manifold, as there would be if both engines flame out and there is no AC power, the APU DC fuel pump operates to supply fuel to the APU for the APU autostart. Normally, the isolation valve would be closed to prevent the APU DC fuel pump pressurising the engine feed manifold. However, if there is an engine flameout during flight, ELMS opens the isolation valve at the same time as it starts the APU DC fuel pump. That action allows the APU DC fuel pump to supply fuel to the left engine. Ref: AMM Ch.28-25-00 P.14.
If fuel was available to the APU via the APU DC fuel pump, then it seems likely that fuel would also have been available to the left engine for a short time after the initial flameout of that engine. Perhaps it’s possible the auto-relight function relit the left engine and it ran for a short time before flaming out for good??
Something else to add to the mix!
@David
RE: “Besides the two boost pump suctions and on the left side that for the APU fuel pump, on each side there is a gravity suction (“fuel suction bypass”) located chordwise half way between those for the two boost pumps (AMM).
With the boost pumps dead, as any right tank residual fuel sloshed about the right engine might get some through that.”
The suction feed only works when the engine is running. If the engine has already flamed out due to low fuel pressure from the boost pumps, then the suction feed won’t help.
@Andrew. Yes, though I do suppose with the engine windmilling it will manage with the gravity feed. I believe the APU fuel pump secondary function, like the boost pumps, is there as belt and braces in case the fuel has air entrained. At altitude as you will know it can be for some time after take off for it to ‘boil’ off out of the tanks. There has been a fair amount of discussion as to whether it is needed in many circumstances even for the APU, higher: many believe the APU will use fuel in the line once the APU pump supply fails, sucking it dry against gravity. I will check my sources if you would like.
Maybe you have it in mind that gravity feed is just for ground priming. From memory I think just the left boost pump starts automatically there.
@TBill,
Thanks for the “MH370 BFO error” info.
Although this indicates that heading change is not sensitive no turn rate is indicated. I wonder here whether this low sensitivity to horizontal movements would apply for a high rate of change, here we are talking much more than 3 Deg per sec (not a standard turn rate). And of course as you mentioned Roll could also be a factor. Not sure whether this makes a difference.
@David
I don’t understand your first sentence; if the engine is windmilling, it is not running.
The engines will run without the boost pumps, but their operation could be adversely affected at altitudes above 38,000ft. I’d be surprised if the APU would continue to run without pressure from the boost pumps or APU DC fuel pump, given that the APU is higher the wings. I can’t imagine the APU pump ‘sucking’ fuel uphill, but I’m happy to be corrected.
I also don’t understand your last paragraph.
How about checking 23S 100-101E?
The Holy Qu’ran Al-Mu’minun Chapter 23:100-101 reads:
Until, when death comes to one of them, he says entreating, ‘My Lord, send me back,‘That I may do righteous deeds in the life that I have left behind.’ Never, it is but a word that he utters. And behind them is a barrier until the day when they shall be raised again.
@Andrew, David, Mick
The first element in the APU’s fuel cluster unit is a boost pump.
:Don
@David
David, what’s the source of your quote in your 12:36am post regarding APU start and the possibility of engine relights please? I know that I’ve read it somewhere previously but I can’t find the parent document.
@Don Thompson
Thanks – my understanding is the boost pump in the APU fuel cluster is intended to pressurise fuel for the second stage gear pump. Will it draw fuel from the APU fuel supply line if the main/centre tank boost pumps and APU DC fuel pump aren’t pressurising the engine fuel feed manifold?
In any case, it’s not really relevant to the engine suction/gravity feed. I’d be very surprised if fuel sloshing around inside the main tanks would feed to the engines via the suction bypass valves if the boost pumps aren’t pumping fuel and the fuel feed manifold has already run dry.
@Mick Gilbert
RE: “David, what’s the source of your quote in your 12:36am post regarding APU start and the possibility of engine relights please?”
ATSB MH370 – Search and debris examination update, 2 November 2016, p.14.
@Andrew. What I have in mind is that while the APU DC fuel pump supplies the left engine in a double flameout, AC lost, using normal tank supplies, if the aircraft is moving about after f.e. as Mick speculated, the right might be fed momentarily with residual fuel as it runs down and as any becomes accessible to the suction inlet. That is the “fuel suction bypass valve” in your engine fuel feed diagram. That of course allows gravity fuel to the engine when there is no manifold pressure, as in this instance. The left engine apparently will relight using the APU fuel pump feed when not “running” in a lit sense and I see the right doing the same with any residual fuel covering its suction outlet, by chance and probably in passing.
I have had reservations that RR auto-relight ignition would respond as per the GE, having studied both as best I can, since the ways the two react differ, but I have set that aside after reading the ATSB statement that the right engine could relight in the descent; as recounted in my 12:36 am and 8:44 pm posts above. The same goes for the residual fuel. Don has postulated that the APU DC fuel pump would access low down fuel in a well or sump, though I have not read of that in the AMM or Training Manual. That there would be residual fuel in the right tank without the well is supported by the ATSB statement.
BTW as doubtless you are well aware but others may not be, the APU DC fuel pump delivery is 3150 lbs/hr so not like a boost pump.
As to the APU sucking the fuel line dry I have been a minority of one expressing doubt that it would, as do you. This arose after I raised the prospect that the fuel in the tank could have been used in left engine relight and hence there would be no APU fuel for a log-on. As to whether the fuel in the line would drive the APU for 2 mins and a bit, one issue was whetherthere would be enough in the line but also I raised the likelihood of vapour lock, given the supply line would (I think)be sized (diameter) for pressurised delivery to get the flow while minimising weight. Also there was the low ambient pressure at altitude (I looked up the fuel’s vapour pressure in comparison) and the suction head, aircraft nose down, with the pump suction being lower than the APU pump, even with the aircraft horizontal. Aircraft acceleration due to gravity was one discussion point. I think it more likely that the APU would access that fuel if its own fuel pump were of the piston or gear wheel type – but that is not the case.
I put this to the ATSB amongst other things, they having agreed that the left engine might auto-relight and consume residual fuel in so doing. They apparently had not encountered that in simulations but now allow that not just this engine but the right too could do this. On the APU fuel quantity they assured me that having looked into this in detail with Boeing, there would be ample fuel for the log-on, INCLUDING that in the line, that implying the line fuel could be added to residual left tank fuel.
I thought you might appreciate this fullsome history since you were not a participant at the time. (I will spare you my view on APU start time, for now! )
I could clarify my last sentence but this already is long enough.
@Don. “The first element in the APU’s fuel cluster unit is a boost pump.” Would you spell that out for me please?
@Mick. “…what’s the source of your quote”. Page 14, last sentence:
https://www.atsb.gov.au/media/5771939/ae-2014-054_mh370-search-and-debris-update_2nov-2016_v2.pdf
@Andrew. Your response to Mick. We crossed again.
@Don. Having now read Andrew’s response to you, no need to amplify thanks
@Andrew
@Don Thompson
@David
Thank you, gentlemen, for the discussion regarding the fuel tanks, inlets and pump configurations; collectively it was both informative and instructive.
In terms of inputs to the flight path subsequent to the (initial) flame-out of the second engine it’s clear that there may have been any combination of residual left or right rudder trim, one or two periods of left flaperon displacement and temporary relights of either or both engines. Add weather and the 10 Boeing/ATSB simulated flight profiles probably now look a bit underdone.
@Andrew
@David
Thank you for the ATSB reference regarding the possibility of either or both engines relighting subsequent to APU start-up.
@Mike Gilbert said, “In terms of inputs to the flight path subsequent to the (initial) flame-out of the second engine it’s clear that there may have been any combination of residual left or right rudder trim, one or two periods of left flaperon displacement and temporary relights of either or both engines. Add weather and the 10 Boeing/ATSB simulated flight profiles probably now look a bit underdone.”
It’s almost impossible to simulate every possible sequence of events. It’s also not possible to know which sequence of events is most relevant. That’s why I chose to take a different approach than Boeing and simplify the study to a single roll/descent that matches the timing of the BFO. (Without pilot input, I maintain it is not likely to match the timing and values of the BFO without a roll/descent similar to what I modeled, even if we can’t be sure about the cause of the roll.) Another important difference from the Boeing study is I assume the 4000 fpm descent to occur at the 7th arc. Instead, Boeing assumes the plane crosses the 7th arc 2 minutes after fuel exhaustion, while I am agnostic about the timing before the log-on request.
I’ve read comments from people (including you) that criticize the simplicity of the simulation and the use of the PMDG 777 on FSX. In fact, I believe the simplicity of the simulation is its strength. As for criticism about FSX, by essentially using it only for its aerodynamic model, most of the shortcomings of the system modeling are eliminated. Do I think the prediction that the plane reached Mach 1.1 was accurate? Of course not. I said the model will not be accurate for transonic speeds. But whether the plane reached Mach 0.97 or 1.1, the path still ends with a high speed, near vertical impact close to the 7th arc. That was the point of the study, which people seem to lose sight of.
@Gysbreght: Your comments were waiting for my approval and now appear.
@Sunken Deal: The captain was a political activist that was anti-corruption and pro-democracy. I have seen no evidence that he was a religious zealot. Let’s not go there.
@David
Thanks – I wasn’t aware of the previous discussion. I’d be happy to hear your view on the APU start time.
@VictorI
I look forward to see results of your suggestion (if I understood you well..) to conduct a simulation with first APU flame-out and neutral rudder-trim and then a simulation without APU but only RAT deployment and neutral rudder-trim to see what happens.
@VictorI
I mixed things a bit up I see.
I mean first with APU-flame-out no RAT deployment and neutral rudder-trim (so you would only have the left flaperon factor).
Then with APU and RAT and neutral rudder-trim (so you would only have the RAT factor). And then one with APU flame out and RAT deployed with neutral rudder-trim (so you would only have the rudder-trim factor if rudder-trim gets applied).
I’m thinking it could be possible to deduce the factors that could lead to a roll this way.
Might be nonsens, just thinking.
@David, Mick, Andrew:
On a Trent engined B777 “[i]n the event of low pressure from both the boost pumps in a main tank, the suction feed bypass check valve opens and fuel, via an inlet screen, is drawn from the main fuel tank by the engine Low Pressure (LP) pump.”
Source: AAIB report 01/2010, G-YMMM
Therefore, together with the statement that the APU DC pump comes online if the engine manifold pressure is lost, I take it that the fuel suction feed inlet is lower in the tank than the inlets/uptakes for the boost pumps, and the APU DC Pump inlet yet lower.
In the case where manifold pressure is lost completely, ie the manifold is empty, I can’t see the suction feed path continuing supply to the engine.
:Don
(PS omitted to hit [submit] on this about 4 hrs ago)
Hello, I think the MH370 aircraft must not have exceeded Mach1 even during its final dive, because the resulting sonic boom would have been detected by underwater (anti-submarine) instruments from a great distance.
During the “glorious” days of Cold War, NATO regularly tracked soviet Tu-95 / Tu-124 naval reconnaisance bombers over the oceans, since their 4 giant contra-rotating turbo-prop engines were so insanely loud as to activate underwater anti-submarine microphones!
@Tamas Feher: Welcome to the discussion.
I agree that most probably the plane did not reach supersonic speeds during the descent. I’ve repeatedly said the PMDG 777 model will not be accurate at transonic speeds. But whether the plane reached Mach 0.97 or 1.1, the unpiloted plane still ends with a high speed, near vertical impact close to the 7th arc. That is the major conclusion.
@DennisW
“As far as TBill’s original question relative to what BFO error might result from roll, I think it is simply a function of the antenna velocity on the surface of the aircraft.”
Yes the antenna velocity during bank or spin rotation was what I originally wondering about.
@Don Thompson
RE: “Therefore, together with the statement that the APU DC pump comes online if the engine manifold pressure is lost, I take it that the fuel suction feed inlet is lower in the tank than the inlets/uptakes for the boost pumps, and the APU DC Pump inlet yet lower.”
Thanks for the information from the AAIB report. I believe the fuel suction feed inlet is higher in the tank than the other inlets. According to the QRH FUEL PRESS ENG L, R checklist, “200 kgs of fuel in the affected main tank is unusable” when the associated is running on suction feed. Ref: B777 QRH NNC.12.24
Oops, that should read “…when the associated engine is running on suction feed”.
@Victor
Re: “I’ve read comments from people (including you) that criticize the simplicity of the simulation and the use of the PMDG 777 on FSX.”
Victor, I have most assuredly not criticised either the simplicity of the simulation or your use of the PMDG B777 sim on FSX.
For the avoidance of any and all doubt, I found the results of the simulation both informative and instructive (and I asked if it was possible to produce an FDR-style readout of flight parameters in order to better understand the flight profile).
I have zero experience with PC-based flight simulations and was, as I think I suggested at the time, simply curious as to your choice of PMDG over PSS given that much of our previous discussion was focussed on PSS. I have made no criticism whatsoever regarding the choice of PMDG over PSS for the simple reason that I have no informed opinion on the matter.
My statement that,
“In terms of inputs to the flight path subsequent to the (initial) flame-out of the second engine it’s clear that there may have been any combination of residual left or right rudder trim, one or two periods of left flaperon displacement and temporary relights of either or both engines.”
was simply an attempt to summarise a couple of day’s worth of discussion that addressed factors not included in the simulation, including some, such as the possibility that the APU DC Pump may have fed the left engine, that were very surprising. That’s not a criticism of the simulation. Short of mastering time travel you’d have been hard pressed to include factors that we weren’t previously aware of.
In Comments on Ben Sandilands’ coverage of your simulation I noted that,
“… while the level of verisimilitude is good it is not completely accurate, particularly when the simulated conditions exceed those associated with normal flight. I very much doubt that an unpowered B777 could reach, leave alone exceed, Mach 1 in a dive, even a vertical dive …”
I also commented that,
“What I think is instructive from the simulation is the first half which illustrates that the airplane could reach the rates of descent represented by the final BFOs.”
I don’t think that anything I’ve stated there is either critical or in dispute.
Apropos of nothing, I found it interesting to compare the “End-of-Flight” graphic at the beginning of the current article with a sketch from page 5 of Frank Taylor’s paper on “Lessons from the Ustica Investigations” – the crash of Itavia 870 into the Tyrrhenian sea in 1980:
http://aviation-safety.net/pubs/other/Taylor_paper_Ustica_illustrated.pdf
In both cases, the fuselage entered the water in a near-vertical, slightly inverted orientation. In the case of Itavia, one distinguishing characteristic is that it did so without having the benefit of a left wing or a tail.
I do not know if anything learned from the wreckage Itavia 870 is applicable to MH370; however, this board (and others that follow MH370) are filled with expert structural engineers and materials scientists. Lacking any such credentials, I can only follow along. Would be interested to read any comments.
@Mick Gilbert: OK. Thank you for your positive comments.
For the record, although I did not include in the post the results from simulated flights that resulted in phugoids, I assure you that for cases in which I imposed roll rates that resulted in smaller bank angles, the FSX PMDG 777 model captures the physics of the resulting flight dynamics, including phugoids. Depending on the timing and magntitude of imposed roll rates due to the free left flaperon, engine restarts, and rudder out-of-trim, the simulations look very similar to the Level D simulations from Boeing and those witnessed by Mike Exner. Until the speeds become transonic or close to stall, I believe the main differences in the simulations are due to differences in system models and other assumptions about the aircraft configuration, not the flight dynamics.
@Tamas @Victor @Mick and others who commented on M=1
Whether the plane reached sonic speed or not also bothers me. All credit for Victor for his paper and the intent of the paper is met. And I agree that Mach 0.99, 0.8, 1.1 won’t make a difference in horizontal displacement.
However, I also wonder what would be the terminal velocity and whether this velocity will be reached before impact or not. If the sonic velocity is actually reached from a mechanical model (CFD or such), it would have been heard as you suggest. Also, some failure modes on the debris associated with local sonic pressure waves (near M=1) would be apparent on the honeycomb panel composite. If is is reached, deep dive scenario probability could be much lower. I think it has its own merit to estimate with more accuracy the impact velocity from a mechanical model (if that has not yet been done by the investigation).
In the second simulated video the plane begins to fly backward just before the left bank initiates, which indicate that the plane is reversing! (Clouds moving forward in relation to the plane!)
@HB
I’m not losing any sleep over the likely terminal speed of the airplane although I think that it was most likely very high. My comment in another forum regarding the unlikelihood of the airplane reaching or exceeding M1.0 was in response to speculation that a M1.0+ descent may have caused an inflight break-up, something that I also consider to be unlikely given the debris recovered to date.
@Johan Hammes: Welcome and thank you for your comment. You are the first person to comment on the direction of the clouds relative to the plane.
You are seeing a bit of an optical illusion. In the video, the camera is fixed in space relative to the plane to the right of the right wing and looking towards the plane. The direction and speed of the cloud movement is determined by both the aircraft’s horizontal speed and its turn rate. For this position of the camera relative to the plane, a left turn will cause the clouds (relative to the plane) to slow down and move forwards. Similarly, a turn to the right will cause the clouds (relative to the plane) to move backwards faster. If there is interest, I can make a video showing different views during a turn to demonstrate this effect, but I think if you think about it, it will make sense.
@Mick
I agree. If speed is near M=1 local sonic pressure wave damage would be expected. It may also be useful to corelate the speed with the failure modes of the debris.
I am scouting the public domain whether i could find relevant plane parameters to do the calculations. Anw that calculation should have been done already by the official investigation. It should be a piece of cake for Boeing to do so they can even use their data from their Existing 3D CFD model. Any one to point out a relevant link?
@sk999
That was interesting article Lessons of Ustica…especially how long the investigations lasted, how people refused to accept the data when non-missile cause became eventually apparent, all of the hype stories about missiles, and so on. I had not heard about that accident. Gives some hope that in the coming decades we will find MH370. Maybe we should just find it now to put it to rest.
@Mick @HB
I suppose this is old question, but if the aircraft was going straight down and the vertical velocity is getting to normal flight speeds, why would there be stress damage? Unless I can see if the aircraft/pilot tried to pull out of it then stresses would build up and maybe get the erosion damage on the flaperon.
@Andrew, @ASLM: After dual engine fuel exhaustion and before the APU starts, the transfer busses lose power, pitot heat is lost, and the control law should degrade from normal to secondary. In doing so, envelope protection should also be lost. However, after reviewing the videos of the Level D simulations that Mike witnessed, it is clear that when the APU started, envelope protection started to function, and the bank angle was limited to 30°. This arrested the steep banked descent and prolonged the flight. All documentation that I have seen indicates that without cycling the PFC disconnect switch, the control law should not return to normal when the APU starts, and envelope protection should not be available. Is that also your (Andrew’s) experience? Could a Level D simulator get this wrong?
@VI that is interesting, isn’t it? It is about 6 weeks since I posed the question, in multiple variants, about the possibility of controlled flight following interruption of AC power.
Paul,
It would be a misrepresentation to describe the PFCS normal mode as ensuring ‘controlled’ flight. The PFCS is not in any way an ‘autopilot’ function.
@TBill
@HB
While I doubt the airplane got to M1.0+ I have no doubt that it reached and exceeded Mmo. That speed combined with the lack of hydraulic control/dampening of the flaperons and ailerons most likely gave rise to damage to and possibly the separation of those surfaces which in turn created further atypical manoeuvring of the airplane in the final stage of its descent.
@Mick Gilbert: Just FYI, I think you missed my answer to you due to a publishing delay.
Does the pilot see at what times the plane sends ACAR messages ?
I’m asking because if the answer is yes,
it’s rather noteworthy that the pilot oddly repeats his flight level (17:07:56 UTC) a mere 8 seconds after the last ACARS transmission (17:07:48 UTC).
@Mick
“While I doubt the airplane got to M1.0+ ”
That is a very safe bet. The terminal speed of a bowling ball is only 300 mph. The fact that no one has actually calculated/estimated a value for a 777 is sad.
@Peter Norton
Thanks Peter, yes I did miss your reply. I also missed the fact that the fixed and portable ELTs have different part numbers. While the portable ELT has a floatation collar, as you note the manner in which it is attached and secured to its mounting bracket inside the door of the forward cabin right hand coat closet would make its spontaneous separation in ghe event of a crash somewhat problematic, I think (we know from Debris Item 5 that the forward cabin right hand coat closet suffered a fair amount of structural damage). The other issue with spontaneous deployment is the antenna; it needs to be released from its folded, stowed position.
Peter Norton,
You asked whether the timing between the last ACARS transmission at 17:07:48 (more precisely, an “Acknowledge User Data” signal at the end of an ACARS transmission) and the pilot’s repeat of flight level, 8 seconds later, is odd. Almost certainly the pilot does not see the timing of individual SATCOM transmissions, but even if he/she did, I would not consider any apparent timing coincidence to be odd. Up to IGARI (and indeed, up to the time of last primary radar contact) enough asynchronous events are happening (or should be happening) that finding coincidences a posteriori is easy.
@Don, Andrew. Further yet on residual fuel availability to the right engine, AMM 28-22-00, p35 et seq seems to say only the aft boost pump will operate in the air, unless that is selected off, the forward then taking over. Residual fuel could be affected by there being no forward tank scavenging. However I suspect I misinterpret somewhere. Can you say where?
@Andrew. On APU start time, the ATSB says about a minute. The APU run up, from a YouTube video of a start on the ground, ceases rising at about a minute but with air inlet having been opened earlier by the sound of it. Inlet opening takes 30-40 secs (AMM) with APU start commencing only when fully open.
The only other info on that I have is from the Heathrow 777 investigation Don referenced, though its introdctory qualification is ambiguous. At p34, “Once the auto start has initiated it takes over 60 seconds for the APU to start…” I do not know whether they mean the run up or the total.
@Don, Andrew. First line, p34 vice 35.
@Victor
@ALSM
RE: “All documentation that I have seen indicates that without cycling the PFC disconnect switch, the control law should not return to normal when the APU starts, and envelope protection should not be available. Is that also your (Andrew’s) experience? Could a Level D simulator get this wrong?”
That’s correct Victor; the PFC Disconnect Switch must be cycled to restore the PFCS to normal mode if the aircraft is airborne. The AMM states:
“If the PFCS is in the secondary or direct modes and the normal mode becomes available, the PFCS may select the normal mode. To do this in the air, you must cycle the PFC disconnect switch. If the airplane is on the ground and ground speed is less than 40 knots, then the PFCS selects the normal mode automatically.”
I’ll have a look at it over the weekend and get back to you.
@Peter Norton
@sk999
RE: “Does the pilot see at what times the plane sends ACAR messages ?”
I can confirm the pilots do not see the ACARS messages that were shown in the ACARS Traffic Log section of the MH370 Factual Information report. The messages are automatically generated and sent in the background to the airline’s system. They are not seen by the pilots or by ATC. The aircraft was under radar control at the time and all communication with ATC was by voice on the area radar frequency.
Lumpur Radar (132.6) cleared the MH370 to climb to FL350 at 1650:08. That call was acknowledged by MH370 at 1650:11 and the aircraft reported maintaining FL350 at 1701:17, which was acknowledged by Lumpur Radar at 1701:21. It’s not clear why MH370 again reported maintaining FL350 some 6 ½ minutes later, at 1707:56. There was no requirement to do so.
@David
RE: “Further yet on residual fuel availability to the right engine, AMM 28-22-00, p35 et seq seems to say only the aft boost pump will operate in the air, unless that is selected off, the forward then taking over. Residual fuel could be affected by there being no forward tank scavenging. However I suspect I misinterpret somewhere. Can you say where?”
The fwd boost pumps are normally powered by the ground service bus, while the aft boost pumps are powered by the transfer buses. The transfer buses provide an alternative power source for the fwd boost pumps, but only if the aft boost pumps are off. That’s to ensure the backup power system isn’t overloaded if a backup generator is powering the transfer buses, because only one backup generator can supply power at a time.
If all buses are powered, then the fwd and aft boost pumps will ALL operate. If both engines fail, the ground service and transfer buses will be unpowered for a time and none of the boost pumps will operate. Once the APU autostarts and restores AC power, ALL boost pumps will again operate.
RE: “On APU start time, the ATSB says about a minute. The APU run up, from a YouTube video of a start on the ground, ceases rising at about a minute but with air inlet having been opened earlier by the sound of it. Inlet opening takes 30-40 secs (AMM) with APU start commencing only when fully open.”
The following video shows a complete APU start sequence from a ‘cold’ aircraft. It takes about 54 seconds from when the engineer selects the APU to start until the APU starts producing power (when the cockpit lights illuminate):
https://www.youtube.com/watch?v=1_PK_YYJBSg
@Andrew. Thank you for clearing up both of those. I will assume the time to start at in altitude and after a cold soak would be the same.
Good video thanks and I see there are more.
I hope he remembered to top up his oil; and wash his hands afterwards.
@Andrew, the PFC DISC switch forces the ACE units to disconnect their PFCs and revert to DIRECT mode. After return to AUTO the PFCs and ACEs resolve the appropriate mode, secondary or normal. Wouldn’t it be typical behaviour for the PFCs to resolve the transition from secondeary to normal mode when the air data sensing is restored?
:Don
Yes Don, that’s my understanding. However, the system won’t automatically transition from secondary to normal mode if the aircraft is airborne. The PFC switch must be cycled to DISC and then back to AUTO.
@TBill DennisW Mick
The airflow accelerates along the top of the wing skin to produce lift. That means local M=1 can be reached. For a plane designed for transonic speeds the skin shape is modified to chanel the pressure waves to avoid damage. For a plane not designed for that the pressure waves are expect to exceed the skin limits resulting in ripples or delamination or local deformation depending on construction materials. Here we are talking about incipient damages which should be apparent on debris. I am not talking about fluttering.
I would expect given weight, minimum drag coefficient and drag area it will still be elevated.
@HB
Agreed, when the critical Mach number is exceeded you’re going to get a supersonic air flow over that part of upper surface of the wing near the centre of pressure and a shock wave forming at the transition back to a subsonic airflow. Currently, we don’t have any debris from the section of either wing that would have been subject to either supersonic airflow or the shock wave (although maybe we should look at Item No 3 in a different light now). What we do have are items of debris that may have been subject to the buffet arising from the airflow separation aft of the shock wave.
@HB
Granted. It is important to distinguish between the speed of the center of mass, and the speed of the air over various surface components. I am quite sure the COM speed was nowhere near Mach 1.0.
Hi all – just getting back after a break from MH370.
Did I miss any of our esteemed readers posting facts or figures for U.S. radar assets on the night of March 7, 2014 at any point within, say, a racetrack shape 250nmi from the line between IGARI and IGOGU? Or how about the specific training exercise the USS Pinckney was on when called away to assist the search? Looking for a specific, time-stamped set of coordinates, here, of course.
Apologies if I’ve missed it: if so, can I please beg your indulgence in reposting these facts and figures below?
I know several of my American colleagues in this forum have many high-level contacts; after 39 months, I would assume this info is plenty stale enough to share.
The more simulations like Victor’s (above) show that the official narrative predicts impact very near Arc 7, the more the official narrative is called into question – and the more we need to go back and audit radar coverage. ALL radar coverage.
Many thanks in advance.
@Victor @Richard
I have a question on Richard’s Wilkins path to 30S. I believe Richard previously posted his detailed spreadsheet here (I have a copy). Is it correct that the speed went up from 460 to 490 at 22:41, for a brief period, and if so what is the logic for that?
@BrockM
@Nederland
I agree that the official story depends on the radar story.
If the radar story is disproved then the official story goes up in smoke.
We have to resolve the radar coverage issue for ALL PSR’s rigorously from first principles, once and for all.
I am starting with Radar 233 Sebang.
@Ventus45.
Yes the Radar story is highly suspicious … need to verify IGARI back to KB
@Ventus
The radar story agrees with the ISAT story. The path from IGARI to 18:25:27 is supported by both. I am not struggling with the radar story at all. I wish it were better, but I see no inconsistencies. The lack of radar coverage by Indonesia is not at all surprising to me. It costs money to staff and operate a radar station. In a period of no suspected threat activity it is an easy budgetary decision to power down for the night. Of course, no one wants to admit to that.
Why create complexity where there is none? The fact that the aircraft has not been found is easily predictable by the uncertainties associated with the ISAT data. It is simply not capable of defining a terminus.
@Mick Gilbert
(and all who are interested in the ELTs):
> Mick Gilbert says:
>
> Thanks Peter, yes I did miss your reply. I also missed the fact
> that the fixed and portable ELTs have different part numbers.
> While the portable ELT has a floatation collar …
ok, glad I was able to clear this up
> as you note the manner in which it is attached and secured to its
> mounting bracket inside the door of the forward cabin right hand
> coat closet would make its spontaneous separation in ghe event of a
> crash somewhat problematic, I think (we know from Debris Item 5
> that the forward cabin right hand coat closet suffered a fair
> amount of structural damage).
That’s exactly why I said above:
«[…] the portable ELT is indeed designed to float. So if the portable ELT escaped the sinking cabin, it would float back to the ocean surface and transmit on all 3 frequencies (121.5 + 243 + 406 MHz) – assuming it was activated by the impact force. […] Could the portable ELT escape the sinking cabin ? […] Maybe the crash impact forces would break it free (detach it from the wall). Then it would float to the surface and transmit. Crash-induced cabin disintegration would also be needed, as the portable ELT was located “inside a coat closet”. But judging from the aircraft pieces retrieved so far, this seems to have occurred.»
If, as you say, “the forward cabin right hand coat closet suffered a fair amount of structural damage”, wouldn’t it be reasonable to assume that the portable ELT would not be trapped inside a sinking(?) fuselage, but float like all the other recovered pieces so far ?
> The other issue with spontaneous deployment is the antenna;
> it needs to be released from its folded, stowed position.
The manual says, it’s a “whip antenna” which seems to self-deploy:
“[…] collar holding a folded antenna in place. When the collar releases, the antenna springs up and the transmitter starts operating.” (quote from my posting above). The diagram on page 30 of the manual seems to confirm this.
If someone could comment on my 2 questions above (why the disadvantageous 50 seconds delay before transmitting and why fixed+portable ELTs both lack a water sensor) I would be also thankful.
With regard to the ACARS messages:
> Andrew says:
> I can confirm the pilots do not see the ACARS messages […]
> The messages are automatically generated and sent in the background
> to the airline’s system. They are not seen by the pilots
Thank you for confirming.
> Peter Norton says:
> it’s rather noteworthy that the pilot oddly repeats his flight level (17:07:56 UTC)
> a mere 8 seconds after the last ACARS transmission (17:07:48 UTC).
> sk999 says:
> You asked whether the timing between the last ACARS transmission at 17:07:48 […]
> and the pilot’s repeat of flight level, 8 seconds later, is odd.
> […]
> Up to IGARI (and indeed, up to the time of last primary radar
> contact) enough asynchronous events are happening […] that finding
> coincidences a posteriori is easy.
First of all, with the term “oddly” I was referring to the pilot repeating his flight level a second time, which in itself is odd (as Andrew said above: “It’s not clear why MH370 again reported maintaining FL350 some 6 ½ minutes later, at 1707:56. There was no requirement to do so.”).
And secondly, yes, I also find the timing odd.
I agree with you that it could theoretically be a mere coincidence.
However, there is a pattern of remarkable timings:
• pilot sends completely unnecessary ATC message only 8 seconds after last ACARS message
• only 5 seconds after passing IGARI and only 1 minute after the last radio transmission, the transponder shuts off
• At 18:22, MH370 vanishes from primary radar. Only 3 minutes later the SDU re-logs on to Inmarsat 3F-1 at 18:25:27.
When you see this pattern emerge in the bigger picture, the chances would be like winning the lottery.
@Dennis
>Why create complexity where there is none?
It’s not my intention to single you out, but the irony here is simply too rich to not indulge. And I know you’re a good sport.
This from the guy espousing a Zaharie pi-jack, all comms off, secret channel negotiation requiring an almost instantaneous wire transfer of millions from the prime minister of Malaysia in the middle of the night: verification required. Then Najib doesn’t comply so Zaharie makes good on his ‘brilliant’ plan and flies off into the SIO, murdering 238 human beings and himself.
Not to even touch on the further added complexities of the proposed loiter and concurrent happenings on board the aircraft itself. Doubtless the pax and crew, with the FO locked out, were just sitting idly by biding their time being reassured by the dude in the cockpit that everything was just fine?
DennisW.
Sabang 233 is a permanant installation that operates 24/7 with direct link to TNI-AU HQ specifically becsuse it is their most north westerly facility. That is well established and not in doubt. That is why I am studying it in depth. Simply put, my radar performance calcs so far suggest that 370 would have had to fly so low to “get under and evade detection by Sebang” that it could not maintain the necessary ground speed to meet the arcs, unless it was pushed way beyond the limits. This would require disabling all autoflight and overspeed protections. Perhaps Andrew might place himself in a hypothetical place and advise what might be theoretically possible (absolute max speed wise) at 15,000 feet and below in 1,000 foot decrements to the deck.
The other three relevant radar stations at L Sibolga and Medan are truck mounted portable units and they do not operate full 24/7. They are not pivotal to the issue, but Sebang quite literally is.
Again, I emphasise that 233 Sebang is full time, 24/7, and is the key to what Jeff Wise called the “riddle”.
@Peter Norton
Peter, regarding the portable ELT, two points;
1. In order for the automatic activation to have the best chance of properly detecting a crash-like deceleration, the ELT mounting bracket is attached to the fuselage. Accordingly, even though the stowage closet obviously suffered substantial damage, there’s no guarantee that the ELT would have come free from its mounting on the fuselage.
2. There’s nothing to suggest that the whip antenna self-deploys; in fact, the instructions for manual deployment of the beacon suggest otherwise.
“If the aircraft has to be evacuated, Follow the instructions :
– unfasten the strap (and the cable if relevant),
– remove the beacon from its bracket,
pull firmly to brake the retaining metallic strap (14, Ref. Fig. 7).
– extend the antenna and take the beacon with you.” (My bolding.)
As to why the fixed and portable ELTs don’t have water activation, I imagine that might have something to do with exposure to condensation (that would be particularly so for the fixed beacon). The water activation set-up on the raft mounted ELT is sensitive enough to be set off by a wetted finger (in fact, that’s the recommended method for manually triggering the device).
@Ventus45
Re: “Sabang 233 is a permanant installation that operates 24/7 with direct link to TNI-AU HQ specifically becsuse it is their most north westerly facility. That is well established and not in doubt.”
How do you know the operating regime of an Indonesian military facility beyond doubt?
Satrad 231 at Lhokseumawe uses the same Thompson TRS 2230D radar as Satrad 233 at Sabang and has the same command structure (at the time the units were commanded by Majors (OF-3 equivalent)). While this is by no means a definitive assessment, from unit photographs of Satrads 231, 232 and 233 there do not appear to be enough commissioned and senior non-commissioned officers to sustain 24/7 operations (rule of thumb a military unit needs 3.5-4 times as many operational personnel to sustain 24/7 operations as is needed for 12/5 ops). I doubt very much whether any of the three radar units that form part of Kosekhanudnas III were operating when MH370 transited the Malacca Strait.
@Ventus45
Where I’ve referred to the Thompson TRS 2230D I should have stated Thomson TRS 2215R.
This could be of interest when discussing radar on Sumatra:
“Indonesian military radar in the West, generally using the Thomson CSF Radar from France that serves as Radar Early Warning, as well as the 3 Dimensional Ressy GCI (Ground Control Intercept) British Plessey. This radar was purchased in the 1980s.
But not all of these radar works well, because of age that is old. Even according to Former KASAU TNI-AU Marshal Purn. Chappy Hakim, some of the radar has been damaged so that his remaining 70 percent. Worse yet, not all military radar operates 24 hours. Partially functioned for 12 hours due to the age factor.
The more pessimistic count is delivered by Former Commander of the National Air Defense Command Marsda F Djoko Poerwoko. Of the total number of TNI-owned radar, 40 percent can not operate.”
http://jakartagreater.com/perisai-pertahanan-indonesia/
(via google translate)
@Andrew said, It’s not clear why MH370 again reported maintaining FL350 some 6 ½ minutes later, at 1707:56. There was no requirement to do so.
While we’re thinking about pilot behavior, do you think it is odd that with the aircraft lined up on the runway, one minute before takeoff, the captain was using WeChat on his cell phone?
@Nederland et al.
Considering the acknowledged deficiencies in the Indonesian radar defense system, I think it will be very difficult to use the non-detection of MH370 by Indonesian radar as evidence of anything.
Effort might be better spent exploring the Singaporean mobile radar source that was in the general vicinity of MH370. If we knew the time, location, capability, and record of target captures, we might have a better idea about which reconstructed paths are possible and not possible. As the radar source was likely a military asset, it has been hard to get this information.
I find it interesting that the BTO and BFO data at the log-on at 18:25 match a flight path along airway N571 with a lateral offset to the right, and standard procedure for pilots is to fly with a 15 NM offset to avoid other traffic when flying without clearance. The position of the “NW point at 1912”, which we have learned represents clearance from the Singapore radar source, is also 15 NM to the right of airway N571. Is it possible that Singapore radar captured MH370 before it cleared the radar at the NW point? Or was MH370 never captured by Singapore radar? The answers to these questions are known by at least Singapore, and probably by other countries, including the US.
@Donald
“This from the guy espousing a Zaharie pi-jack, all comms off, secret channel negotiation requiring an almost instantaneous wire transfer of millions from the prime minister of Malaysia in the middle of the night: verification required. Then Najib doesn’t comply so Zaharie makes good on his ‘brilliant’ plan and flies off into the SIO, murdering 238 human beings and himself.”
I think the pijack and lack of communication are givens.
I will admit to rampant speculation on the rest of it.
I should have resorted to Occam’s Razor and “that’s the way pilots like to fly airplanes”, and stuck my pin in the map at 38S like everyone else (of course, that was rampant speculation as well). I just got distracted by why a fight to Beijing was diverted instead of a flight to the West, and why the Malay response was non-existent.
I keep having a recurring image of a Far Side cartoon depicting a bunch of geeks with a spreadsheet in one hand and a drink in the other socializing under a “10th Year Reunion of MH370 Analysts” banner. The only thing missing is a caption.
@Victor
If the Singapore mobile captured MH370 at the NW point, ATSB has a lot of explaining to do, because $200 million spent searching assuming simple FMT left turn at Sabang. Maybe someone DOES have a lot of explaining to do.
@Ventus
I am not thinking it was necessary to avoid Sabang radar on the outbound leg, as I am still thinking MH370 probably made a deke move to the northwest. It would be the FMT that was disguised, and the Inmarsat arcs show that probably happened around ISBIX.
@TBill: To be clear, I did not mean to imply that the NW point was a capture, as the ATSB has suggested there was no capture at this point. Rather, it might represent a hypothetical capture that would have occurred if the plane hadn’t flown outside of radar range, i.e, cleared the Singaporean radar source.
@Victor Iannello
On the other hand, a FMT at IGOGU or ANOKO would position it on the CHENNAI/KL FIR boundary. The aircraft was diverted essentially at the KL/HCM FIR boundary, and closely followed the BANGKOK/KL boundary when it flew back across the Malay Peninsula. This suggests possibly that the pilot was keen to avoid being noticed by any primary radar that might be operating at that hour.
If the US had any additional radar data, I am quite sure they would have shared it with the ATSB, and it would have had a bearing on defining the western limits of their search area. The Aussies have stated more than once that they are not privy to any information not already in the public domain. Call me naive if you like, but I’m inclined to agree with them.
@Victor
I wouldn’t agree here. Even the source above implies that Indonesia is keen to have at least one radar running at a time in Sumatra, and some work better than others (although the range can be reduced especially during peacetime). Indonesian statements on their radar system, to me suggest, that Sabang radar was operational and may have spotted MH370 but not in own airspace (I’d take this as Indonesia, like Malaysia, not having a backup of their radar data and relying only on reports by an operator whose job it apparently is to monitor only own airspace). There was an US-Thai maneuver upcoming, and that could mean increased interest in monitoring own airspace.
The strongest argument, however, is that MH370 stayed clear off Sumatra, even though it eventually turned south, and this, to me, indicates MH370 was trying to evade detection, regardless of whether Sabang radar was on or off, because there was no certainty it was switched off. It makes little sense for me to explain that route if MH370 was subsequently flying directly through Sabang (and/or Lhokseumawe) radar range.
Plus, a route around Sumatra and eventually to ISBIX delivers interesting results, to my mind.
@ROB
“The Aussies have stated more than once that they are not privy to any information not already in the public domain. Call me naive if you like, but I’m inclined to agree with them.”
That would explain their refusal to release any more information to the public. The information is already there.
@Rob said, “The Aussies have stated more than once that they are not privy to any information not already in the public domain.”
I think it is likely that the ATSB knows more about the Singapore radar source than has been shared publicly, whether or not returns from MH370 were captured. When the DSTG reconstructed paths, the BFO at 18:40 along with an assumption about level flight determined that the FMT occurred before 18:28 and 18:40, so knowledge about “clearance” from the Singapore radar source did not influence these calculations. Earlier path reconstructions that ignored the 18:40 BFO and allowed a later FMT did indeed make use of the NW point. If we allow the possibility of a descent at 18:40, then the NW point again might help to select a range of possible paths.
@Nederland, @Rob, @TBill, et al.
I see no evidence that MH370 flew in a way to evade primary radar, as it flew near radar installations at Kota Bharu, Western Hill (Penang), and Butterworth. However, there is evidence that it may have avoided Indonesian airspace.
@Victor
I agree. It is even possible that MH370 flew near Malaysian radar installations to expose their vulnerability (and for whatever reason, the Malyasian response was abysmal, and this has never been publicly investigated). But it was probably trying to avoid Indonesian airspace (probably in order to avoid interception, whereas MH370 felt reasonably ‘safe’ in Malaysian airspace), and a route directly at the boundary of Sri Lankan and Indonesian airspace does work with the data imo. The 18:40 descent could mean that MH370 was trying to reduce the line of sight with Indonesian radar.
@Victor Iannello
Perhaps I should have said he wanted to avoid being noticed by ATC. Going dark at 17:20, at the same time de-energising the SDU, and not re-energizing it again until he judged he was out of primary radar range (anybody’s primary radar range at that time of night) it would appear as if he had been blown up. By 18:24, when he put the SDU back on line, it wouldn’t matter if the MAS were able to make contact with the aircraft, and thereby discover he was still airborne, because he would be out of range of radar and out of range of fighters, and could swing round into the SIO, confident (or so he thought) of never being traced.
@Victor
Re: “While we’re thinking about pilot behavior, do you think it is odd that with the aircraft lined up on the runway, one minute before takeoff, the captain was using WeChat on his cell phone?”
Yes, if true, that is extremely odd. Lined up on a runway waiting for a take-off clearance is no place to be stuffing around with a cell phone.
@DennisW
Very funny. No the sensitive stuff they have refused to release, on the grounds it would damage the Commonwealth, has nothing to do with radar, but everything to do with the pilot in/not in control issue, had how far he might have glided beyond the agreed search area. There are very likely members among the SSWG who can’t be made to privately at least, swallow the official line, the line imposed by the Malaysian government. They are not all as stupid as you might think, but are having to keep it buttoned.
Honestly, if there wasn’t a conspiracy theory, you’d have to invent one!
…on a instruction flight no less…but it points to a lack of security/discipline. The cockpit doors since 9/11 give privacy to the crew so there is some freedom to do so. Not to mention possible nefarious intent.
@Andrew
Agree, no place to be playing with your cell phone (Najib refused to take the message, apparently) unless you knew it would be the last time you would be your last ever flight. Quite what the FO thought about his behaviour, we will never know.
AS far as I remember the flight till IGARI and the turn back were captured by Indonesian radar. And this happened after midnight, so at least a major radar station was operating at that time there.
It could well have been a trick to simulate emergency routes to Kota Bharu and Penang with making the suggestion of landing there. And that’s why they did not scrambled the plane or if they did not bring it down.
Didn’t the minister said; ‘we don’t shoot down our own plane, the Americans would’? “That are your words, not mine”, the journalist replyed.
After Penang and out of Malaysian radar range he would have known he would be save as long as he stayed in Malaysian airspace. And I think that’s what he did. Flying way beyond 18:40 to the north-west with a descent. And it could well be he made the FMT around 19:12. Avoiding Indonesian airspace and radar range comfortably.
Why state a hypothetical radar-time related to Singapore mobil radar when there is no reason to do this at all?
And then indeed, what is there to hide.
@ROB
Why send a last farewell message when the plan was to disappear with no trace or suspicion, so no one close to him noticed the pilot might have had such plans?
@Nederland
“Why send a last farewell message when the plan was to disappear with no trace or suspicion…?
That is because that was not his plan. He was fully intending to return as an opposition party hero. The phone call was merely a step in a much different plan. It was not a farewell message.
@DennisW
A coded message to “go ahead with the plan on this flight”?
China should know, it’s a Chinese provider and there are concerns of it being ‘safe’. At least they discontinued searching for the plane once the search moved to the south.
@Nederland
“A coded message to “go ahead with the plan on this flight”?”
That is my take on it. Flight time from KL to IGARI is quite predictable. What is not predictable are departure delays. Shah’ s call merely served to synchronize the events to follow with his diversion near IGARI.
@Victor
Victor, can I ask you for your source regarding the Captain’s use of WeChat when the airplane was lined up and awaiting take-off clearance please. My understanding is that WeChat did not provide the Malaysian Communications and Multimedia Commission with any information regarding the timing of the use of the app.
Fuel questions. According to Factual Information, the plane was loaded with 49.7 tons of fuel prior to departure, and the last ACARS report at 17:06:43 gave 43.8 tons. How accurate are these values?
My understanding of how the fuel system procedures work is as follows.
1. There are 3 fuel tanks – 2 main ones in the wing, and a center fuel tank in between.
2. Fuel is either “usable” or “unusable” – i.e. the latter is the residual amount below the level of the fuel inlets that cannot be accessed by the engines. Normally fuel levels refer to the usable amount only.
3. The center fuel tank holds about 1 ton of “unusable fuel”, but in fact most of that fuel can be pumped via a scavenger system into the main tanks provided the latter are less than full.
4. The plane arrived at the gate after a previous round trip flight to and from Beijing. The center tank would not have been needed for that flight, so probably the scavenger system had plenty of time to remove any unusuable fuel well in advance.
5. According to FI, the L an R tanks had 3.7 and 4.5 tons respectively before refueling (8.2 tons total). My understanding is that these amounts are measure via the “totalizer”, which is a fancy ultrasonic fuel gauge. The totalizer is required to be set so as to read 0 fuel when precisely the last usable fuel has been used.
6. The operational flight plan fuel analysis called for 49.6 tons of fuel (including 0.5 tons of taxi fuel). Factual Information says that the Captain ordered 49.1 tons, which is the amount excluding taxi fuel. (Is that standard procedure?)
7. When the aircraft was refueled, the amount that was loaded was determined by fuel flow meters on the refueling system.
8. The total amount after refueling was actually 49.7 tons (again, presumably measured using the totalizer – 24.9 L and 24.8 R).
9. After departure, the remaining fuel on board is calculated by subtracting the fuel burned as measured by onboard fuel flow meters from the departure fuel (the “calculated” value). The totalizer reading is also available, but because it is subject to certain inaccuracies while in flight, it is used as a cross-check rather than a primary source. Presumably ACARS reports the calculated value.
10. The total remaining fuel at 17:06:43 should thus be the amount of fuel at departure (taken from the totalizer) minus the amount burned as computed from the flow meters.
All of the measures of fuel mass are subject to small errors. Besides errors in the calibration of the gauges and meters themselves, one needs to convert volumetric measurements to mass measurements by knowing the density of fuel. The density changes with temperature (rougly 1% per 10 deg C) and with batch – different batches at the same temperature can vary by up to 1%. The conversion of fuel flow to remainin mass in the FMC software apparently has a bug, and the “calculated fuel” can actually be in error, although it is probably small for the short duration up to the last ACARS reading.
So there are two questions.
1. Is the above an accurate description of the refueling process?”
2. Given the fact that the actual on-board fuel (as well as fuel burn rate) will have some error, did Boeing incorporate that error into its calculation of feasible flight paths such that the furthest South paths may have been on the high side (i.e., that of maximum fuel) of the allowed error range? A 2% error increase in fuel would add about 1 degree of latitude to the range.
Here are some publications that I found helpful.
http://www.flight.org/calculated-and-totalizer-fuel-pre-fuelling
http://www.flight.org/the-boeing-777-eicas-fuel-scavenge-system
http://www.pprune.org/archive/index.php/t-372917.html
@Ge Rijn
Regarding Indonesian radar surveillance of MH370, the Factual Information Report states;
“d) Medan Indonesia Radar
The Medan ATC Radar has a range of 240 Nm, but for unknown reasons, did not pick up any radar return bearing SSR transponder code A2157 of MH370. The Military however admitted that they picked up MH370 earlier as it was heading towards waypoint IGARI. No other information was made available.
The wording “… as it was heading towards waypoint IGARI.” is significant; my reading of that is that the airplane was tracked on part of its outbound leg towards IGARI rather than all the way to IGARI.
It is also worth noting that in a local peculiarity Malaysia (UTC +8) is on a different time zone to Western Indonesia (UTC +7). Accordingly, MH370’s take-off at 1641 UTC was at 2341 IWT or before midnight on Sumatra. I think that the failure of Indonesian military radar to track MH370 on its return leg across the Malay Peninsula from IGARI was most likely because they had shut down operations at midnight.
@sk999
“After departure, the remaining fuel on board is calculated by subtracting the fuel burned as measured by onboard fuel flow meters from the departure fuel (the “calculated” value). The totalizer reading is also available, but because it is subject to certain inaccuracies while in flight, it is used as a cross-check rather than a primary source. Presumably ACARS reports the calculated value.”
I was told the the ultrasonic fuel totalizer was extremely accurate, and that running out of fuel unexpectedly was a non-starter relative to being a part of any flight path scenario/theory. I too held the opinion that fuel remaining was determined by subtracting the integrated fuel flow meter information from the fuel load at departure, but was informed that was not the case.
@Nederland
On second thoughts, I have to say I can’t imagine what Shah would have been doing on WeChat after boarding the plane, if indeed he was. My remark about him maybe talking with Najib was meant to be “tongue in cheek” and I apologise if I gave the impression I thought it could be true.
@Mick Gilbert
The distance from Medan to IGARI is more than 360 nm, presumably this was a secondary radar picking up the transponder code. At midnight (Sumatra time), MH370 had not even reached cruising altitude. I think it would therefore be misleading to say “as it was heading towards waypoint IGARI”. Compare this to p. 4, FI, where “tracking towards waypoint IGARI” refers to 1:11 MYT, well past midnight in Sumatra. Medan may still have lost MH370 before arriving at IGARI because of the distance in between. Remarkably, the FI does not say anything about military radar from any country other than Malaysia, even though some countries said their primary radar did spot MH370 after it diverted.
@ROB
OK, my point was more about doubting the reasoning that the social network activity could indicate a suicide plan. It may still be significant, however.
Clarification: obviously, the FI mentions Medan military radar, but probably secondary radar picking up the transponder code while it was still available. The FI does not mention primary radar from any country having tracked MH370 after its diversion, even though some countries said they have tracked MH370 after the diversion. Therefore the FI is useless to make a guess about whether or not Lhokseumawe or Sabang were operational at that time (or even to make guesses about Medan primary radar), but Indonesia implied Sabang was operational.
@Mick
The WeChat activity is documented in the RMP report. I don’t have the link, but do remember it. IIRC, it showed the captain using WeChat while lined up on the runway, only one minute prior to takeoff. I’ll look for a link to the part of the report that it is referenced in.
@Nederland
“I think it would therefore be misleading to say “as it was heading towards waypoint IGARI”. ”
They’re not my words, that’s what the Factual Information Report says. However, I don’t believe that statement to be in anyway misleading; as I’ll explain below I believe that Indonesian military radar would have tracked MH370 from just after take-off to somewhere just short of the east coast of the Malaysian Peninsular near Kuala Trengganu, in other words, “as it was heading towards waypoint IGARI”.
“The distance from Medan to IGARI is more than 360 nm, presumably this was a secondary radar picking up the transponder code. ”
While the TNI-AU’s Kosek Hanudnas III (National Air Defense Sector Command III) is headquartered at Medan there is no military radar head there; the four Sector III radar heads are Satuan Radar 231 Lhokseumawe, Satuan Radar 232 Dumai, Satuan Radar 233 Sabang and Satuan Radar 234 Sibolga. MH370 was more likely tracked by the Thomson TRS 2215R radar of Satrad 232 at Dumai; located only 70 nm across the Straits of Malacca from Kuala Lumpur, Satrad 232 would have tracked MH370 almost continuously as it passed through about 7,000 feet just after take-off to just short of the east coast near Kuala Trengganu.
Whether we’re talking primary radar or secondary radar, atmospheric ducting aside, there has to be uninterrupted line of sight between the radar head and the target. For a target at 35,000 feet the radar horizon for a radar head about 30 metres above sea level is about 210 nautical miles. Tripling the height of the radar head adds about 80 nautical miles to the radar horizon. No ground based SSR would be able to interrogate a transponder at 35,000 feet at a range of 360 nautical miles.
“… At midnight (Sumatra time), MH370 had not even reached cruising altitude.”
No, but it was very close; based on the 1707:29 UTC ACARS Position Report, MH370 would have been passing through around 33,500 feet at 0000 IWT.
“… the FI mentions Medan military radar … ”
No, it doesn’t it. The FI refers to “The Medan ATC Radar … “; that is a reference to the civilian Eldis MSSR-1 ATC radar at Medan.
> Mick Gilbert says:
> As to why the fixed and portable ELTs don’t have water activation,
> I imagine that might have something to do with exposure to
> condensation (that would be particularly so for the fixed beacon).
> The water activation set-up on the raft mounted ELT is sensitive
> enough to be set off by a wetted finger (in fact, that’s the
> recommended method for manually triggering the device).
Good point and certainly true for the fixed ELT, but concerning the portable ELT, the cabin air never gets that humid, wouldn’t you agree ?
I just brought up the topic as the life raft ELTs don’t transmit on satellite-monitored 406 MHz but in close proximity only, which makes a big difference in remote crashes such as MH370.
> Mick Gilbert says:
> Peter, regarding the portable ELT, two points;
> 1. […] even though the stowage closet obviously suffered substantial damage,
> there’s no guarantee that the ELT would have come free from its
> mounting on the fuselage.
>
> 2. There’s nothing to suggest that the whip antenna self-deploys;
> […]
> “extend the antenna and take the beacon with you.” (My bolding.)
ad 1)
My impression is that not much force is needed (IMO much less than would be exerted in a crash), but it’s difficult to tell from the instructions in the manual alone. If neither of us has laid hands on this ELT model, we can only speculate. My hope was that someone here on this blog may have already manipulated this type of ELT or a similar one.
ad 2)
You could be right, but it’s also possible that the whip antenna self-deploys. On this point the manual is not specific one way or the other. So again, absent any hands-on experience, we can only speculate. On page 30 you see the antenna bent down while the beacon is wall-mounted – because the antenna is blocked by the wall and thus cannot unfold on its own. Once the beacon is detached from the wall, the antenna is not longer blocked and could unfold (“spring up”). There are certainly ELT models which behave in that very way – I quote from my posting above: “the portable ELB’s stowed in the cabin at various locations […] are designed to float on the surface of the water. The water usually dissolves a paper/cardboard collar holding a folded antenna in place. When the collar releases, the antenna springs up and the transmitter starts operating.” In the case of ADT406AP I don’t think you have to “extend” the antenna, I think it extends on its own (springs up). There seems to be another problem, however: Judging from the pictures on this fact sheet, there is a strap which holds the antenna in bent-down position. The strap is also mentioned in the manual (“unfasten the strap”). I am afraid the strap would prevent the antenna from springing into upright position.
The question is: How important is it that the antenna is in upright position? Maybe signal strength of a bent-down antenna is sufficient?
@Donald
Thanks Donald. If you can find the reference in the RMP report I’d be grateful. I’ve had a look for a reference to WeChat activity by time of use and haven’t been able to find anything.
@sk999
Another variable is the jet fuel quality measurements and energy content of the fuel actually loaded. That would be basic info we should have in an accident investigation. I though airports were supposed to get fuel quality data after an accident to make sure the fuel was OK for other flights.
@Mick Gilbert: In the RMP report, Folder Appendix (1), Appendix J-1, Page 7, there are the following time blocks:
>Zaharie Last WeChat Log In at 00:40:02 8/3/14
>Takeoff KLIA 8/3/2014 12:41:00 AM
@Mick
Also, there is an illustration on pg.117 (see below) depicting a WeChat Log In at 00:40:02. It is part of a ‘flow’ chart detailing inbound and outbound calls on the day of the flight, as well as inbound calls after the flight disappeared. A notable exception was the inclusion of a 45 minute phone call Zaharie had with an MAS flight engineer some weeks (IIRC) prior to the flight. This same engineer mad multiple calls to Zaharie after the flght had vanished.
Here is the RMP link (pg. 117): https://www.scribd.com/document/335982461/MH370-RMP-Folder-Appendix-227-pages
@Victor
@Donald
Thank you for the references, gentlemen.
“Zaharie Last WeChat Log In at 00:40:02 8/3/14” Does that suggest that the WeChat app was used at that time or might it be an indication that the Captain turned is phone off at that time?
@All,
Has any entity/expert group ever proposed to replicate part of this flight real-time to test the different theories and compare ISAT data to that of M9-MRO with Inmarsats cooperation? Would this not be the most reliable undertaking to narrow down a FMT and possible terminus?
@Dennis W,
“He was fully intending to return as an opposition party hero”..
How would that have actually played out? The PIC would have committed mass kidnapping, blackmail, jeopardized PAX./crew lives in the process(and the list goes on) and would be arrested as soon as he landed the aircraft in any neighboring country. The death penalty would be highly likely for committing this crime and in the eyes of many he would not be hailed a hero.
@sk999. I looked into the centre tank scavenge issue some time ago. I don’t have the references to hand, but the conclusion that I reached was:-
a) centre tank fuel is automatically scavenged during flight as wing tank fuel drops below a certain [quite high] threshold
b) scavenge during previous flight would have emptied centre tank, and no new fuel loaded centre – so no fuel available for MH370 from this tank.
I would be very happy to be corrected on this if the interpretation is wrong.
@sk999
RE: “Fuel Questions.”
“6. The operational flight plan fuel analysis called for 49.6 tons of fuel (including 0.5 tons of taxi fuel). Factual Information says that the Captain ordered 49.1 tons, which is the amount excluding taxi fuel. (Is that standard procedure?)”
My guess is the 49.1T figure was reported in error by the investigators. The loadsheet clearly shows the take-off fuel figure as 49.1T. The departure fuel after refuelling was 49.7T, which includes the 0.5T taxi allowance. The extra 0.1T is well within the accuracy of the refuelling system.
Regarding your other questions:
“1. Is the above an accurate description of the refueling process?”
Yes. The FQIS takes a snapshot of the totaliser fuel at engine start. The calculated fuel is then determined by subtracting the fuel used (from the fuel flow meters) from the snapshot totaliser figure.
There has been a lot of discussion between Boeing and the airlines over discrepancies between the calculated and totaliser fuel figures. Airlines now accept that the totaliser figure is the more accurate of the two fuel figures, especially as the fuel quantity reduces during flight. The totaliser figure has a certified accuracy of ±1%, the same as the fuel flow meters. Because the FQIS uses the totaliser figure as its starting point for the calculated fuel, the total error in the calculated fuel can increase as the flight progresses due to the additional errors of the fuel flow meters. The totaliser figure, however, will always remain within ±1% of the indicated figure.
@Paul Smithson
I agree. With 49.7T of fuel on board, there should not have been any fuel in the centre tank.
Oops. The sentence “The totaliser figure, however, will always remain within ±1% of the indicated figure” should read “The actual fuel on board will always be within ±1% of the totaliser figure”.
@Mick Gilbert
Thanks for clearing up the Indonesian radar/IGARI issue so far. My memory was wrong about the turn at IGARI being captured. 360Nm would be to far anyway as you say. But still it was admitted Indonesian primary radar tracked the plane flying towards IGARI.
Till out of range after midnight or till midnight local Indonesian time which is indeed one hour earlier?
I guess the Medan primary radar, if operational after midnight local time, could have captured MH370 when coming back in to radar range crossing the Malaysian peninsular. There’s no mention of this.
So I guess this is also a ‘dead-end street’ leaving no usefull clues.
@Ge Rijn
You’re more than welcome.
I am pretty sure that the primary surveillance radar at Medan is a Ramet PSR Morava M10 (co-mounted with M10SR secondary surveillance radar). The PSR has an instrumented range of about 80 nautical miles; it wouldn’t have been able to track MH370 at any point along its flight path.
@Mick Gilbert asked, Does that suggest that the WeChat app was used at that time or might it be an indication that the Captain turned is phone off at that time?
I don’t see how you can generate a log-in event by turning off a phone.
@Mick Gilbert
Yes, I am aware that the FI says “as it was heading towards waypoint IGARI”. If you look at the similar wording p. 4 bottom, then that means close to IGARI (after midnight Sumatra time).
Thanks for clarifying that Medan only has secondary radar. That is what I thought. The FI is very specific to say that all information in that section relates to “Medan Indonesia radar”. The airport in Medan used to be a commercial airport (Polonia International), but is now a military airport (Soewondo Air Force Base). Thus, the information on that radar comes from the military. The first sentence means that the Medan (secondary) radar did not pick up MH370 transponder code within its range (i.e. flying in the Strait of Malacca), unsurprisingly because the transponder was off. The second sentence says that Medan secondary radar picked up MH370 transponder code (that is very specific because the FI mentions “MH370”) earlier while heading towards IGARI. Because IGARI is >360 nm away from Medan, they must have lost the signal at some point. Even if you are correct (and the FI heading is wrong), and it really was Dumai radar, then the distance to IGARI is still ~345 nm, and so the signal would be lost at some point before reaching IGARI.
Therefore, there is nothing whatsoever in the FI to suggest that either Medan or Dumai radar were off after midnight. There is certainly nothing in the FI to suggest that Sabang or Lhokweumawe radar were off. The FI simply does not say anything about primary radar captures from any country other than Malaysia after MH370 diverted off course (transponder off), even though both Thailand and Vietnam said they did track MH370 during this stage to some extent. Indonesia also implied (via newspaper reports) that Sabang radar was operational during that night. Even if neither Sabang or Lhokseumawe were operational, I’d still find it unlikely MH370 would have flown directly through Indonesian airspace within Sabang radar range, because otherwise it could have done so long ago. Instead, MH370 avoided that airspace.
@Mick
““Zaharie Last WeChat Log In at 00:40:02 8/3/14” Does that suggest that the WeChat app was used at that time“…?
Well, the Wiki states that the WeChat servers are located in China.
The WeChat application apparently uses client (user device) to server encryption;
https://www.quora.com/How-secure-or-private-is-WeChat
That being the case, the Malaysian mobile communication service provider would have no indication
as to the content of Shahs mobile communication, other than a record of a connection to the
WeChat server address (& possibly no record of the encrypted communication sent to same).
Probably, Shah merely sent a ‘WeChat Moment‘ (and the text of that probably ‘pretyped’
for multiple reuses) to a ‘WeChat Group’ that said nothing more interesting than;
‘Zaharie has left Malaysia for N days‘.
@Peter Norton
Peter, while condensation would not be an issue for an internally mounted ELT, incorporating water activation would mean ELTA would be designing and manufacturing two quite different ELTs for fixed and portable applications. I’m sure that you have noticed that the ELTA Model ADT406 AF/AP Pn 01N65900 (AF – fixed) and Pn 01N65910 (AP – portable) are the same unit, the only differences being the floatation collar and mounting bracket on the 01N65910. That one unit/two applications approach has a number of advantages for both suppliers and users.
Regarding deployment of the portable unit and antenna extension, it would appear that there are a variety of mounting and securing set-ups – see http://www.hellopro.fr/images/produit-2/1/4/8/balise-de-detresse-modele-adt-406-s-163841.jpg
versus
http://www.hellopro.fr/images/produit-2/0/4/8/balise-de-detresse-modele-adt-406-ap-elt-163840.jpg
In both instances, however, note the plastic cover. Based on this (https://www.dropbox.com/s/y0tmvof4oqtnxkn/MAS%20B777%20Safety%20and%20Emergency%20Manual%202-26%2C-27.png?dl=0) from the MAS Safety and Emergency Services Manual it would appear that their portable ELTs were fitted with a cover. If it is the same as that shown in those photos then it encompasses the folded whip antenna.
Based on this – http://www.elta.fr/uploads/product/ba832055983a6506312d39d5acedab6a3d152adb.jpg – there also appears to be a lanyard connecting the beacon to the mounting bracket.
Regardless of the configuration of the portable ELT on 9M-MRO one thing that is clear is that it is not designed to self-deploy.
Andrew,
Thanks for the clarifications r.e. fuel system. The calculated v. totalizer values are presumably still valuable for detecting, say, a fuel leak. An error of “1%” is a rather round number but it is probably not known any better. There still remains the question of which value (totalizer or calculated) goes into the ACARS report, and if it is calculated, what is the error on that just after the top-of-climb (which is when the last value was reported). I’ve seen statements that it within 0.2 tons or so.
What this means is that the actual fuel at 17:06:43 is likely within the range 43.4-44.2, possibly within 43.0-44.4 at the outside, but no better.
@Victor
Regarding “Zaharie Last WeChat Log In at 00:40:02 8/3/14”, if the app logs in frequently to poll the server for messages then turning off the phone would most certainly cause the log-in immediately prior to the phone being turned off to become the “Last WeChat Log In”.
@Mick Gilbert: I don’t see how turning off a device generates a log-in event. If anything, it would generate a log-off event. If you have evidence that WeChat behaves like this, I would be interested to see it.
@sk999
“The calculated v. totalizer values are presumably still valuable for detecting, say, a fuel leak.”
Yes, that’s correct. The calculated figure is also useful as a backup in the event of a failure within the FQIS.
“There still remains the question of which value (totalizer or calculated) goes into the ACARS report…”
I believe it’s the totaliser figure. I said earlier that the calculated figure is determined by the FQIS, but that’s not correct. The calculated figure is determined by the FMC and is only used for fuel prediction purposes. The figure reported by ACARS should be within 1% of the actual fuel on board.
@Nederland
Re: “Yes, I am aware that the FI says “as it was heading towards waypoint IGARI”. If you look at the similar wording p. 4 bottom, then that means close to IGARI (after midnight Sumatra time).”
There is no literal interpretation of that phrase that means “close to IGARI”. The phrases “at 1711 UTC [0111 MYT] as the aircraft was tracking for waypoint IGARI.” and “at 1711 UTC [0111
MYT] as the aircraft was tracking for waypoint IGARI are quite specific with regards to the airplane’s position because they clearly state a time; “earlier as it was heading towards waypoint IGARI” is not specific; they do not mean the same thing.
Re: “The airport in Medan used to be a commercial airport (Polonia International), but is now a military airport (Soewondo Air Force Base). Thus, the information on that radar comes from the military.”
That is an incorrect assumption. There are two airports serving Medan;
– Kualanamu International Airport, about 25 kilometres north east of the city, and
– Soewondo Air Force Base (the former Polonia International Airport) about 2 kilometres south of CBD.
To the best way of my knowledge Kualanamu has an Eldis MSSR-1 SSR ATC radar (range of about 240 nautical miles) for area air traffic control work and a RAMET PSR Morava M10 with a co-mounted M10SR secondary surveillance radar (range of about 80 nautical miles) for local approach work. I don’t have details for Soewondo but would assume that they either inherited the legacy civilian radars from its days as Polonia International or they share approach coverage with Kualanamu.
The only radar based at Medan that could have tracked MH370 at any point along its flight path either outbound to IGARI, back across the Malay Peninsula or up the Straits of Malacca was the MSSR-1 at Kualanamu. The FI is quite specific with regards to the “Medan ATC Radar [that] has a range of 240 Nm” (ie the civilian MSSR-1); it didn’t track MH370 as might be expected for at least part of its outbound leg towards IGARI. Draw your own conclusions as to why that was the case but on the outbound leg it has nothing to with the transponder being turned off.
Re: “The second sentence says that Medan secondary radar picked up MH370 transponder code (that is very specific because the FI mentions “MH370”)”
It doesn’t say that at all. The second sentence reads, “The Military however admitted that they picked up MH370 earlier as it was heading towards waypoint IGARI.. Although this sentence appears as part of the paragraph under the heading Medan Indonesia Radar there is no military radar at Medan that was capable of picking up MH370 early in its flight towards waypoint IGARI. The only Indonesian military radar capable of picking up MH370 early in its flight towards waypoint IGARI was the Thomson TRS 2215R radar of SatRad 232 at Dumai. As I have previously stated Satrad 232’s command unit, Kosek Hanudnas III (National Air Defense Sector Command III) is based at Medan; perhaps that’s why the statement about the military radar is bundled in under Medan Indonesia Radar, perhaps it’s just a case of poor layout and/or organisational writing skills on behalf of the author.
Re: “Even if you are correct (and the FI heading is wrong), and it really was Dumai radar, then the distance to IGARI is still ~345 nm, and so the signal would be lost at some point before reaching IGARI.”
Yes, it would have. I thought that I had made that clear when I stated that “military radar would have tracked MH370 from just after take-off to somewhere just short of the east coast of the Malaysian Peninsular near Kuala Trengganu“. For the avoidance of any and all doubt, if SatRad 232 Dumai tracked MH370 on its outbound leg towards IGARI it would have lost contact with it about 110 nautical miles before the airplane reached IGARI.
Regarding flying up the Straits of Malacca and avoiding Indonesian military radar at either Sabang or Lhokseumawe, that would take some doing that goes well beyond just staying out on Indonesian airspace. The Straits are only 160 nautical miles across from Lhokseumawe to Phuket, 220 nautical miles from Sabang to Phuket. The Thomson TRS 2215R at both those locations has an instrumented range of about 275 nautical miles. Tracking 15 nautical miles to the right of N571 up the Straits MH370 would have had to have been below 4,000 feet to avoid detection by SatRad 233 Sabang.
What’s more likely?; that the airplane flew this radar avoiding low level run up the Straits and still had sufficient fuel to be in the air at 0019 UTC or that the Indonesian military radar assets, like their Malaysian counterparts, simply were not operating at very early o’clock on a Saturday morning?
@Victor
“I don’t see how turning off a device generates a log-in event. If anything, it would generate a log-off event. If you have evidence that WeChat behaves like this, I would be interested to see it.
The RMP report doesn’t say that a log-in event was generated, does it? All it states is “Zaharie Last WeChat Log In at 00:40:02 8/3/14”. What does that mean? From what I understand once WeChat has been installed and the handset has been verified the app runs in the background, there is no log in process. So what does the “Log In” refer to?
Is there such a thing as a log-off event with that app? It seems like a lot is being read into an eight word statement in the RMP report that nobody really understands but I’m more than happy to be corrected on that if we have a WeChat expert out there somewhere; buyerninety seems to have something beyond just a vefy basic understanding of how it works.
@Mick Gilbert
“Draw your own conclusions as to why that was the case but on the outbound leg it has nothing to with the transponder being turned off.”
My point is simply that there is not the slightest hint in the FI that any Indonesian radar was shut down at midnight. This is because no Indonesian radar (and the FI is very clear it is the Medan radar) was able to track MH370 up to IGARI. Of course, that doesn’t have anything to do with the transponder turned off, it’s just about distance. And surely “heading towards IGARI” is different from “shortly after take off”, and that implies, if anything that the radar was on after midnight.
“there is no military radar at Medan that was capable of picking up MH370 early in its flight towards waypoint IGARI.”
The FI does not say if this was a military radar, only that the information came from the military, so we may as well be talking about the same radar. Because it picked up “MH370” rather than “a blip associated with the flight route” or something like that, it very much looks like this was a secondary radar as well.
But at the end of the day, it really doesn’t matter because none of the possible radar installations would have been able to track MH370 up to IGARI. Therefore there is no positive hint that any of these radar installations were shut off at midnight. Even if they were, that doesn’t imply that both Sabang and Lhokseumwawe were switched off. On the contrary, surveillance may easily have switched over to either or both of these installations, if indeed some military radar was switched off at that time.
“No other information was made available” is the important bit here, for me. It clearly says that the FI does not give any information about any Indonesian primary radar other than in Medan. The same way as it does not give any information about primary radar of any country other than Malaysia.
“Regarding flying up the Straits of Malacca and avoiding Indonesian military radar at either Sabang or Lhokseumawe, that would take some doing that goes well beyond just staying out on Indonesian airspace.”
I was never able to understand where that information came from. Of course, MH370 was flying through Malaysian airspace while being observed by primary radar from a number of neighbouring countries. It is also clear that MH370 was not flying anywhere near Indonesian airspace for that duration (a possible explanation would be concern of interception specifically by Indonesian military, it’s the largest player in the region and has a reputation for strict surveillance of own airspace). It is therefore a reasonable assumption that MH370 continued to display this behaviour for the early unknown segments of the flight (i.e. avoiding Indonesian airspace). It is also easy to come up with a route that fits the data and passes along the boundary of Indonesian airspace, probably outside of Sabang radar range. To be sure, there is no positive proof for that, but there is nothing in the FI remotely contradicting it either.
Only if MH370 passed through Indonesian airspace AND was detected by Indonesian radar in so doing, there would have been the risk of interception (by Indonesia).
@Mick Gilbert: Once installed, WeChat does not have to run in the background. If a user desires to use the application when it is not already running, the user opens the app and logs in. I have never used WeChat, but basic instructions on how to use WeChat are easily found.
If you find evidence that powering down a cell phone causes WeChat to detect a log-in, I (and others) would be very interested.
@Victor
@Mick Gilbert
Victor, maybe add switching to flight mode to that as well.
[Comments here are closed. Please continue the discussion under the new post.]